Настоящее изобретение относится к системе для автоматического распознавания циклов загрузки механизма для перемещения грузов там, где механизм содержит подъемное устройство для подъема груза и устройство перемещения для горизонтального перемещения груза. При этом устройство перемещения, в частности, может быть механизмом поворота и/или механизмом изменения угла наклона стрелы подъемного крана.
При этом система включает в себя средство определения изменения груза для автоматического определения изменения груза, по меньшей мере, на основании выходных сигналов устройства измерения подъемной силы, средство определения местоположения груза, которое определяет местоположение груза, по меньшей мере, в горизонтальном направлении, и средство распознавания цикла загрузки для автоматического распознавания цикла загрузки, при этом распознавание цикла загрузки происходит, по меньшей мере, на основании выходных сигналов средства определения изменения груза и средства определения местоположения груза.
В этой связи известны системы для распознавания циклов загрузки кранов для перемещения грузов, в которых начало и конец цикла распознается по превышению или падению заданного ниже порогового значения веса груза с помощью грузозахватного органа, калиброванного по весу груза. Оператор крана, кроме того, должен ввести триггерный уровень, при этом масса груза распознается и определяется как вес груза в цикле загрузки, если упомянутый триггерный уровень пересечен. При этом в качестве триггерного уровня используется угол поворота крана.
В известных устройствах в связи с этим есть множество проблем, которые, в частности, связаны с необходимостью управления операциями подъемного крана вручную. Поэтому триггерный уровень или угол поворота часто не устанавливается или устанавливается в неправильном положении, так что никакой регистрации не происходит или происходит неправильная регистрация. Кроме того, во избежание неточного распознавания циклов загрузки очень высокие пороговые значения веса груза используются для установления начального положения и положения остановки цикла. Поскольку при этом вес полезного груза зачастую много ниже, чем вес грузозахватного органа и канатной оснастки, и ниже максимального веса груза на порядок, надежное распознавание циклов загрузки, таким образом, не может быть обеспечено. Вдобавок система измерения должна быть настроена очень точно.
Дополнительные проблемы вытекают из-за ручной калибровки грузозахватного органа и канатной оснастки, что, в частности, представляет источник частой ошибки во время замены грузозахватного органа.
Поэтому цель настоящего изобретения - создать систему для автоматического распознавания циклов загрузки машины для перемещения грузов, для управления которой требуется меньше операций и, где возможно, без ручных операций, и, тем не менее, распознающую циклы загрузки и/или вес грузозахватного органа с высокой достоверностью.
Эта цель достигается в соответствии с настоящим изобретением устройством согласно пункту 1 формулы изобретения.
Настоящее изобретение в связи с этим представляет собой систему для автоматического распознавания циклов загрузки машины для перемещения грузов, при этом машина содержит подъемное устройство для подъема груза и устройство перемещения для горизонтального перемещения груза.
Система в соответствии с настоящим изобретением может быть использована, например, в подъемном кране. В этом случае подъемным устройством может быть, например, подъемный механизм крана; устройством перемещения может быть, например, поворотный механизм и/или механизм изменения угла наклона стрелы подъемного крана. Груз, подвешенный на тросе крана, может быть поднят или опущен, когда подъемный механизм приведен в движение. Груз может быть перемещен, по меньшей мере, в одном горизонтальном направлении при повороте и/или изменении угла наклона стрелы подъемного крана вверх и вниз.
При этом система в соответствии с настоящим изобретением может использоваться не только с подъемным краном, но также и с другими машинами для перемещения, в частности со строительной техникой, механизмами транспортировки, транспортными тележками, ричстакерами и/или колесными автопогрузчиками. Все эти машины имеют подъемное устройство, посредством которого груз может быть поднят и опять опущен, а также и устройства перемещения для горизонтального перемещения груза.
Согласно изобретению система включает средство определения изменения груза для автоматического определения изменения груза, по меньшей мере, на основании выходных сигналов устройства измерения подъемной силы, средство определения местоположения груза, которое определяет местоположение груза, по меньшей мере, в горизонтальном направлении, и средство распознавания цикла загрузки для автоматического распознавания цикла загрузки, при этом распознавание цикла загрузки происходит, по меньшей мере, на основании выходных сигналов средства определения изменения груза и средства определения местоположения груза. При этом в соответствии с настоящим изобретением средство распознавания цикла загрузки распознает и запоминает местоположение груза в качестве места поднятия груза, если было выявлено положительное изменение груза. Такое положительное изменение груза расценивается затем как начало нового цикла загрузки на основании запроса, был ли груз перемещен по горизонтали на заданное расстояние от места поднятия груза.
Система согласно изобретению предпочтительно выявляет положительное изменение груза в качестве начала нового цикла загрузки, только если груз был перемещен на заданное расстояние от места поднятия груза по горизонтали после выявления положительного изменения груза. Тем самым исключается, чтобы каждый раз при многократном подъеме и опускании груза на месте загрузки груза, что может происходить, например, для лучшего расположения грузозахватного органа, определяется новый цикл загрузки. Система согласно настоящему изобретению становится, таким образом, намного более надежной в отношении распознавания циклов загрузки. Кроме того, больше не нужно вручную предварительно устанавливать триггерный уровень. Надежный критерий для надежного распознавания нового цикла загрузки задается сравнением текущего местоположения груза с сохраненным в памяти местом поднятия груза и запросом, был ли груз перемещен на заданное расстояние от места поднятия груза по горизонтали.
В настоящем изобретении триггерный уровень для подтверждения цикла загрузки, таким образом, создается автоматически и в зависимости от соответствующей позиции загрузки груза. Заданное расстояние от места поднятия груза может быть фиксированным расстоянием, например, на которое груз удален от места поднятия груза. При этом это может быть расстоянием, например, в три метра. Расстояние, в частности, должно быть больше, чем расстояние, обычно необходимое для точного позиционирования груза.
Средство определения местоположения груза определяет местоположение груза, например, относительно координат машины; например, по отношению к подъемному крану, с указанием угла поворота и угла наклона стрелы крана. Местоположение и/или перемещение груза или грузозахватного органа предпочтительно определяется через местоположение и/или скорость головки стрелы крана. При этом местоположение и/или движение груза и/или грузозахватного органа (которое только требуется в горизонтальном направлении) соответствует местоположению и/или скорости головки стрелы крана.
Система согласно настоящему изобретению, кроме того, предпочтительно имеет средство определения скорости груза, которое определяет скорость груза, по меньшей мере, в горизонтальном направлении, при этом распознавание цикла загрузки дополнительно происходит на основании выходных сигналов средства определения скорости груза. Определение скорости груза предпочтительно, в свою очередь, происходит на основе угла поворота, и/или изменения угла наклона стрелы крана, или скорости поворота, или скорости изменения угла наклона стрелы крана. Распознавание цикла загрузки улучшено еще больше за счет использования скорости груза для распознавания цикла загрузки. Благодаря этому не допускается, чтобы по флуктуациям выходного сигнала устройства измерения подъемной силы, происходящим из-за динамических свойств грузовой системы, ошибочно признается новый цикл загрузки.
Средство распознавания цикла загрузки предпочтительно расценивает положительное изменение груза как начало нового цикла загрузки на основании запроса, не превысила ли скорость груза заданной величины при положительном изменении груза. При этом положительное изменение груза предпочтительно расценивается в качестве начала нового цикла загрузки, только если скорость груза не превышает заданную величину при положительном изменении груза.
Сильные колебания в выходных сигналах устройства измерения подъемной силы при этом могут возникнуть, например, из-за колебаний груза во время горизонтального перемещения груза. Такие флуктуации, однако, не рассматриваются системой как начало нового цикла загрузки, так как скорость груза в горизонтальном направлении обычно превышает заданную величину во время такого качания груза. В начале реального цикла загрузки грузозахватный орган наоборот обычно не перемещается, или почти не перемещается в горизонтальном направлении, так как оно должно быть выровнено в соответствие с грузом. Таким образом, скорость груза обеспечивает хороший критерий для того, чтобы не принимать во внимание изменения груза, которые не соответствуют началу нового цикла загрузки.
В системе в соответствии с настоящим изобретением, кроме того, предпочтительно средство распознавания цикла загрузки распознает конец активного цикла загрузки на основании запроса, происходит ли отрицательное изменение груза. В системе согласно изобретению предпочтительно отрицательное изменение груза расценивается в качестве конца активного цикла загрузки, только если вслед за этим распознается начало нового цикла загрузки. Если, напротив, за отрицательным изменением груза следует положительное изменение груза, которое не расценивается как начало нового цикла загрузки, потому что скорость груза превышает заданную величину при положительном изменении груза, отрицательное изменение груза тоже не расценивается как конец активного цикла загрузки.
Тем самым может быть не допущено, чтобы флуктуации груза во время перемещения груза ошибочно расценивались в качестве конца активного цикла загрузки. Однако, поскольку вполне возможно, что грузозахватный орган все еще находится в движении во время разгрузки груза, например, когда насыпной материал распределяется по некоторой длине с помощью грейфера, для отрицательного изменения груза нет никакого критерия, относящегося к скорости груза. Таким образом, расценивается ли отрицательное изменение груза как конец активного цикла загрузки, зависит исключительно от того, как расценивается последующее положительное изменение груза.
В системе в соответствии с изобретением предпочтительно распознавание цикла загрузки происходит на основе дискретного конечного автомата. Такой дискретный конечный автомат позволяет просто выполнять распознавание цикла загрузки согласно изобретению.
Дискретный конечный автомат предпочтительно имеет, по меньшей мере, следующие состояния: никакого груза; положительное изменение груза распознано; активный цикл загрузки подтвержден. В связи с этим конечный автомат вначале находится в состоянии никакого груза. В этом состоянии измеренный сигнал, генерируемый устройством измерения подъемной силы, используется для определения массы грузозахватного органа. Если теперь распознается положительное изменение груза, система переключается в состояние распознанного положительного изменения груза. В то же время местоположение груза при положительном изменении груза запоминается в качестве места поднятия груза. Если теперь груз был перемещен на заданное расстояние от места поднятия груза по горизонтали, после положительного изменения груза, автомат состояний переключается в состояние подтвержденного активного цикла загрузки. Таким образом, распознано начало нового цикла загрузки. В состоянии подтвержденного активного цикла загрузки масса определяется на основании сигналов устройства измерения подъемной силы.
Если конечный автомат наоборот находится в состоянии распознанного положительного изменения груза и следует отрицательное изменение груза, конечный автомат переключается назад в состояние «без груза» без распознанного активного цикла загрузки. Если конечный автомат, напротив, находится в состоянии подтвержденного активного цикла загрузки и следует отрицательное изменение груза, конечный автомат переключается в состояние «без груза», на основании чего распознается конец активного цикла загрузки. При этом данные по законченному циклу загрузки предпочтительно сохраняются в памяти, такой как база данных.
Если запрос касается скорости: является ли скорость груза заданной величины скорости груза при распознавании положительного изменения груза, конечный автомат изменяется следующим образом: конечный автомат переключается из состояния «без груза» в состояние распознанного положительного изменения груза, если происходит положительное изменение груза и скорость ниже заданной величины. Если, напротив, происходит положительное изменение груза при скорости груза, которая выше заданной величины, автомат переключается из состояния «без груза» непосредственно в состояние подтвержденного активного цикла загрузки. Если происходит отрицательное изменение груза в состоянии подтвержденного активного цикла загрузки, конечный автомат переключается в состояние «без груза». Это, однако, расценивается в качестве конца активного цикла загрузки, только если конечный автомат вслед за этим переключается в состояние распознанного положительного изменения груза. Если, наоборот, конечный автомат переключается непосредственно в состояние подтвержденного активного цикла загрузки, выполняется продолжающийся активный цикл загрузки. При этом, например, логическая схема выбора более высокого уровня может быть использована для оценки того, когда происходит начало, а когда конец активного цикла загрузки.
В системе в соответствии с изобретением предпочтительно средство распознавания цикла загрузки определяет вес груза на основании выходных сигналов устройства измерения подъемной силы, в частности, путем вычисления средней величины по активному циклу загрузки или по частичному диапазону активного цикла загрузки. Автоматическое распознавание цикла загрузки используется для определения веса груза для каждого активного цикла загрузки.
Система в соответствии с изобретением предпочтительно включает в себя блок распознавания грузозахватного органа, который автоматически определяет вес грузозахватного органа. Таким образом, ручная калибровка устройства может быть исключена. Автоматическое определение веса грузозахватного органа предпочтительно происходит на основе дискретного конечного автомата. Если используется конечный автомат, как было описано выше, определение веса грузозахватного органа предпочтительно происходит в состоянии «без груза».
Вес грузозахватного органа предпочтительно определяется путем вычисления средней величины, при этом не принимаются в расчет фазы, в которых выходной сигнал устройства измерения подъемной силы ниже определенной пороговой величины, ниже ранее определенного веса грузозахватного органа. Тем самым исключается искажение при определении веса грузозахватного органа, когда уменьшен выходной сигнал устройства измерения подъемной силы при помещении средства подвешивания на груз.
Положительное изменение груза предпочтительно выявляется путем определения изменения груза, если выходной сигнал устройства измерения подъемной силы превышает вес грузозахватного органа на заданную величину. Отрицательное изменение веса, наоборот, выявляется, если выходной сигнал устройства измерения подъемной силы снова показывает вес грузозахватного органа, приближенный к заданной величине.
Настоящее изобретение также относится к системе для автоматического распознавания замены грузозахватных органов в машине для перемещения грузов, в частности в подъемном кране, при этом машина содержит подъемное устройство для подъема груза. Система содержит устройство измерения подъемной силы для измерения подъемной силы и блок распознавания грузозахватного органа, который автоматически распознает замену грузозахватного органа, по меньшей мере, на основании выходных сигналов устройства измерения подъемной силы.
Настоящее изобретение позволяет автоматически распознавать и учитывать замену грузозахватного органа и тем самым изменение веса грузозахватного органа. При этом не требуется отдельного преобразователя сигнала на грузозахватном органе, поскольку определение происходит, по меньшей мере, на основании выходных сигналов устройства измерения подъемной силы.
Система предпочтительно включает в себя определение местоположения, которое определяет местоположение грузозахватного органа, по меньшей мере, в горизонтальном направлении, вместе с блоком распознавания грузозахватного органа, который автоматически распознает замену грузозахватного органа, по меньшей мере, на основании выходных сигналов устройства измерения подъемной силы и на основании определения местоположения.
Система предпочтительно включает распознавание изменения веса для автоматического распознавания изменения веса, по меньшей мере, на основании выходных сигналов устройства измерения подъемной силы, при этом устройство распознавания грузозахватного органа распознает замену грузозахватного органа на основании изменения груза, выявленного при определении изменения груза.
Блок распознавания грузозахватного органа предпочтительно запоминает местоположение грузозахватного органа, если произошло изменение груза. Затем определяют, соответствует ли изменение груза замене грузозахватного органа, по меньшей мере, на основании запроса, касающегося удаленности в горизонтальном направлении грузозахватного органа от его местоположения, сохраненного в памяти.
Система предпочтительно включает распознавание цикла загрузки для автоматического распознавания цикла загрузки, при этом блок распознавания грузозахватного органа функционирует исходя из данных по распознаванию цикла загрузки.
Распознавание замены грузозахватного органа предпочтительно происходит исходя из данных по распознаванию цикла загрузки, как было представлено выше. Система для автоматического распознавания замены грузозахватного органа согласно изобретению имеет большие преимущества независимо от системы для автоматического распознавания циклов загрузки, соответствующей настоящему изобретению.
Замена грузозахватного органа предпочтительно распознается на основе одного или более дискретных конечных автоматов. Это позволяет выполнять надежное распознавание замены грузозахватного органа, даже если используются только выходной сигнал устройства измерения подъемной силы и координаты машины.
Кроме того, предпочтительно распознавание грузозахватного органа происходит на основании распознавания цикла загрузки, и местоположение грузозахватного органа запоминается, если отрицательное изменение груза произошло в то время, когда отсутствовал активный цикл загрузки. При этом отрицательное изменение груза, когда активный цикл загрузки не распознан, расценивается как замена грузозахватного органа на более легкий исходя из запроса, касающегося выполнения следующего условия: после отрицательного изменения груза грузозахватный орган перемещен на заданное расстояние по горизонтали от сохраняемого в памяти местоположения. При этом отрицательное изменение груза распознается для состояния, в котором отсутствует активный цикл загрузки и выходной сигнал устройства измерения подъемной силы падает ниже ранее определенного веса грузозахватного органа на заданную величину.
Поэтому, если грузозахватный орган или машина для перемещения грузов перемещается на заданное расстояние по горизонтали после отрицательного изменения груза, причем выходной сигнал устройства измерения подъемной силы не возвращается в диапазон ранее установленного веса грузозахватного органа и не превышает этот диапазон, это расценивается как замена грузозахватного органа на более легкий. Тогда установленный вес грузозахватного органа обновляется.
Если распознавание грузозахватного органа осуществляется через конечный автомат, он переключается из состояния «без груза» в состояние отрицательного изменения груза при отрицательном изменении груза, то есть, если выходной сигнал устройства измерения подъемной силы ниже ранее установленного веса грузозахватного органа на заданную величину. В этом состоянии выполняется проверка условия: перемещен ли в горизонтальном направлении грузозахватный орган или машина для перемещения груза. Если это перемещение превышает определенную заданную величину, например шесть метров, это расценивается как переход к более легкому грузозахватному органу. Конечный автомат затем опять переключается в состояние «без груза», при этом установленный вес грузозахватного органа обновляется.
Если, наоборот, распознано положительное изменение груза, конечный автомат опять переключается в состояние «без груза» без обновления установленного веса грузозахватного органа. Положительное изменение груза выявляется, если выходной сигнал устройства измерения подъемной силы превосходит на заданную величину ранее установленный вес грузозахватного органа.
Кроме того, предпочтительно блок распознавания грузозахватного органа распознает замену грузозахватного органа на основе множества дискретных конечных автоматов, которые функционируют параллельно, и их состояния проверяются логической схемой управления более высокого уровня. В частности, таким образом может быть распознана замена на более тяжелый грузозахватный орган. При этом всякий раз, когда первый конечный автомат подтверждает активный загрузочный цикл, предпочтительно запускается второй конечный автомат. Второй конечный автомат стартует в состоянии «без груза» и тем самым распознает соответственно более высокий вес как вес грузозахватного органа.
Логическая схема управления более высокого уровня решает, какой из конечных автоматов, функционирующих параллельно, действительно распознает правильный активный цикл загрузки, а какой из конечных автоматов должен быть удален. Это всегда решает логическая схема управления, когда один из конечных автоматов распознает конец активного цикла загрузки.
Предпочтительно, в случае когда первый конечный автомат распознает конец цикла активной загрузки, сначала ждут в течение заданного времени, распознают ли следующие конечные автоматы конец цикла активной загрузки. Если это не происходит, первый конечный автомат оценивается как конечный автомат, который дает правильный цикл загрузки.
Если, напротив, следующие конечные автоматы сигнализируют, что их цикл активной загрузки был закончен, решение принимается на основе дополнительного критерия. Для этого сохраняется местоположение, в котором первый конечный автомат распознал конец цикла активной загрузки. Затем выполняется проверка в отношении веса, измеренного в тот момент, когда грузозахватный орган перемещен в горизонтальном направлении на заданное расстояние от этой точки, например на три метра. В качестве правильного конечного автомата рассматривают конечный автомат, для которого установленный вес грузозахватного органа соответствует весу груза, определенному на данный момент.
Кроме того, предпочтительно при распознавании цикла загрузки в соответствии с настоящим изобретением сохраняют в базе данных данные цикла загрузки по каждому распознанному циклу загрузки, при этом база данных позволяет выполнить оценку данных позднее. Система в соответствии с настоящим изобретением тем самым обеспечивает всестороннюю и точную оценку рабочих режимов по перемещению грузов.
При этом данные по циклу загрузки предпочтительно включают следующие данные: вес груза, и/или продолжительность цикла загрузки, и/или позицию начала и остановки, и/или время начала и остановки, и/или вес грузозахватного органа, и/или минимальную и максимальную величину веса груза в течение цикла загрузки, и/или длину перемещения, и/или характеристики машины или приводов машины. Большинство из этих данных может быть сохранено в базе данных.
Оценка данных предпочтительно включает определение одного или более из следующих данных: потребление энергии/топлива, полный вес перемещенного груза, средние транспортные характеристики, показатели мощности/производительности. Оценка данных может проводиться непосредственно в системе или альтернативно с помощью дополнительного устройства, в которое передаются данные из базы данных.
Тем самым возможно множество выполняемых функций. Например, можно таким образом учитывать полный перенос грузов, выполненный системой в соответствии с настоящим изобретением. Клиент, следовательно, имеет возможность определить полный перенос груза при перегрузке насыпного груза исключительно на основании данных по распознаванию цикла загрузки в соответствии с настоящим изобретением.
Данные по распознаванию цикла загрузки в соответствии с настоящим изобретением могут быть использованы для равномерной загрузки судна. При погрузке насыпных грузов на судно полезный груз за один захват может быть точно определен посредством распознавания цикла загрузки в соответствии с изобретением. Таким образом, можно избежать несимметричной загрузки судна.
Данные по распознаванию цикла загрузки, кроме того, могут использоваться для демонстрации точного выполнения работы по перемещению груза. Кроме того, имеется возможность для обработки показателей работы, например, для каждого конкретного оператора крана.
Помимо системы для автоматического распознавания циклов загрузки и системы для автоматического распознавания замены грузозахватного органа, таких как были описаны выше, настоящее изобретение также относится к машине для перемещения грузов, содержащей одну или обе системы.
Машиной для перемещения грузов может быть, например, подъемный кран с подъемным устройством, соответствующим подъемному механизму крана. Устройство измерения подъемной силы предпочтительно представляет собой устройство для измерения нагрузки на трос в подъемнике. В поворотном кране устройство переноса соответствует поворотному механизму и/или механизму изменения угла наклона стрелы подъемного крана.
Вместе с тем машиной для перемещения груза могут быть, например, стрелковый контейнерный погрузчик, автопогрузчик с вильчатым захватом, экскаватор, колесный погрузчик или любая другая машина для перемещения груза, содержащая подъемный механизм для подъема груза. Системы в соответствии с настоящим изобретением без проблем могут использоваться с этой техникой, так как распознавание цикла загрузки и распознавание грузозахватного органа происходит независимо от конкретной конструкции машины для перемещения грузов, исключительно на основании измерения силы и определения местоположения.
Настоящее изобретение, кроме того, включает способ распознавания циклов загрузки машины для перемещения грузов, причем машина содержит устройство подъема для подъема груза и устройство перемещения для горизонтального перемещения груза. Способ в соответствии с настоящим изобретением включает следующие этапы:
определение подъемной силы подъемного устройства; выявление изменения груза, по меньшей мере, на основании определенной подъемной силы; определение местоположения груза, по меньшей мере, в горизонтальном направлении; автоматическое распознавание цикла загрузки, по меньшей мере, на основании выявленного изменения груза и местоположения груза. В соответствии с изобретением способ включает дополнительные этапы: определение местоположения груза в качестве места поднятия груза, если выявляется положительное изменение груза, и оценка положительного изменения груза как начала нового цикла загрузки на основании запроса, касающегося выполнения условия: груз перемещен на заданное расстояние в горизонтальном направлении от места поднятия груза.
Способы в соответствии с настоящим изобретением имеют те же преимущества, которые были уже описаны выше в отношении систем, соответствующих настоящему изобретению. Способы предпочтительно реализуются в представленных системах.
Настоящее изобретение далее подробно описано со ссылкой на чертежи, на которых:
фиг.1 - пример машины для перемещения грузов в соответствии с настоящим изобретением;
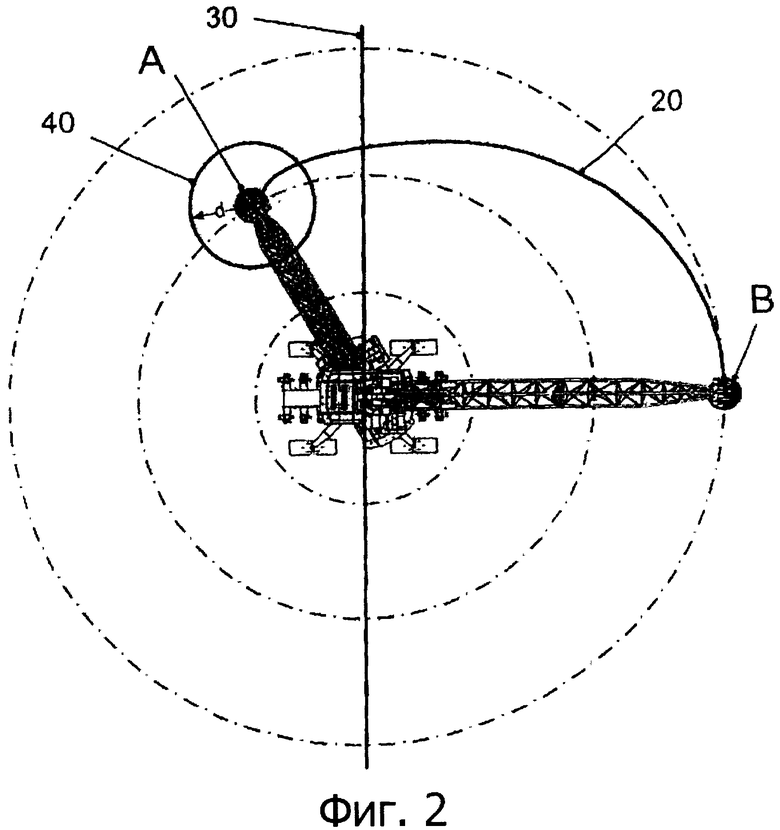
фиг.2 - представление цикла загрузки с высоты птичьего полета;
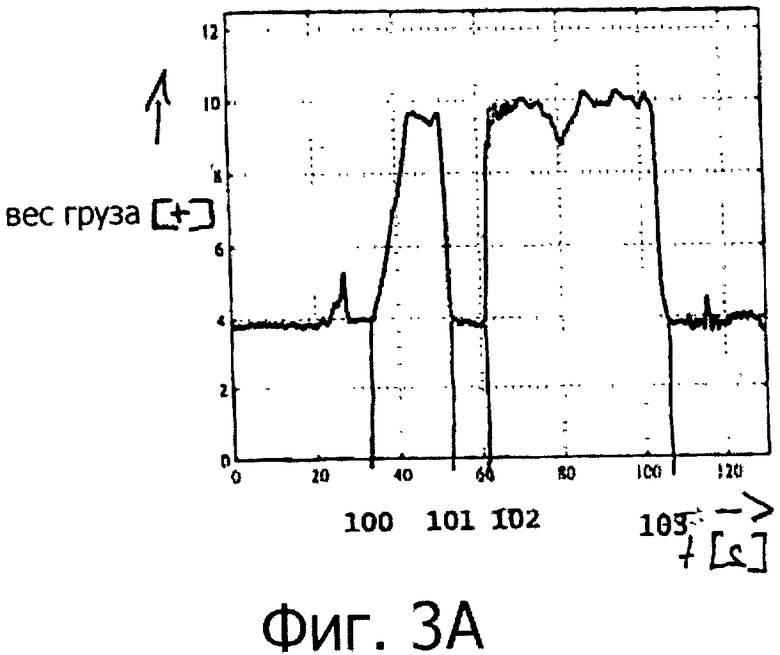
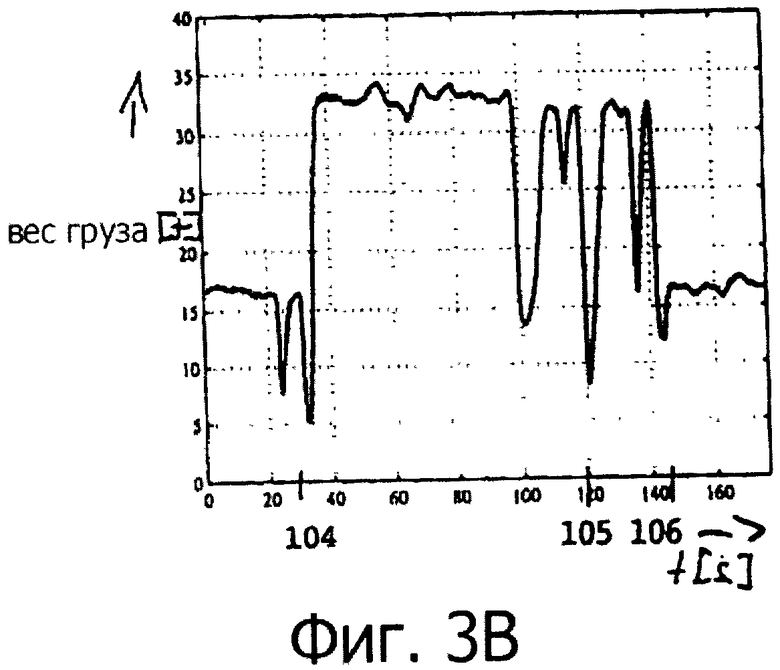
фиг.3а и 3b - сигнал веса груза в течение цикла загрузки при использовании грузоподъемного крюка и спредера;
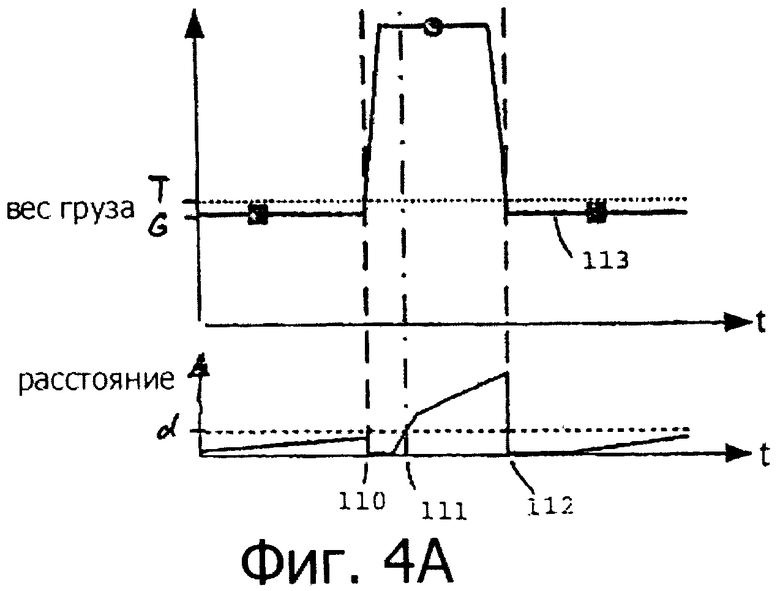
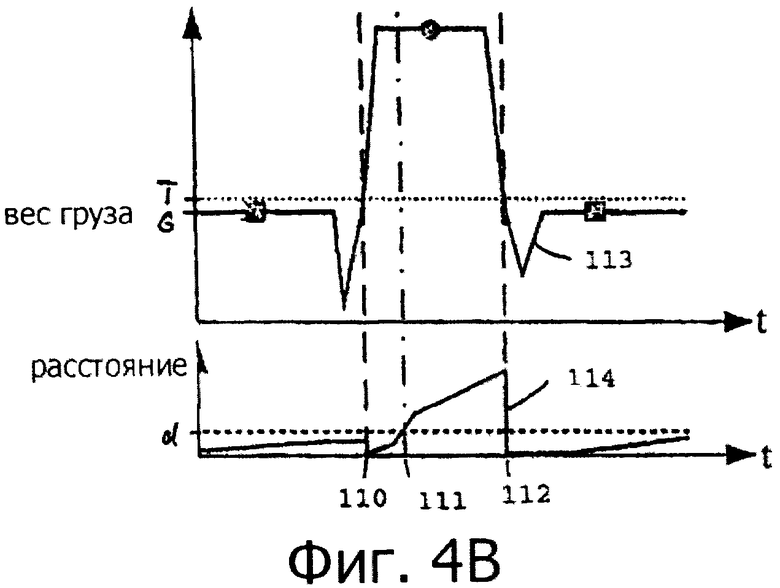
фиг.4а и 4b - сигнал веса груза и боковое перемещение груза в течение цикла загрузки при использовании грузоподъемного крюка и спредера;
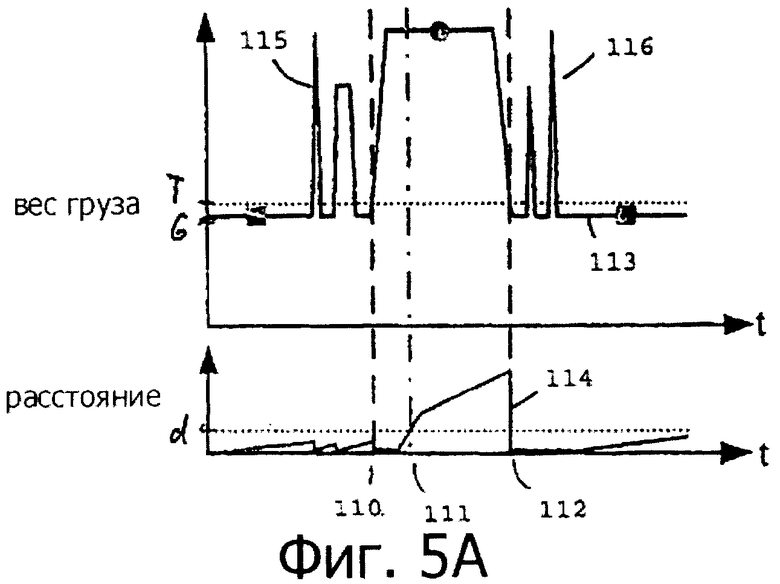
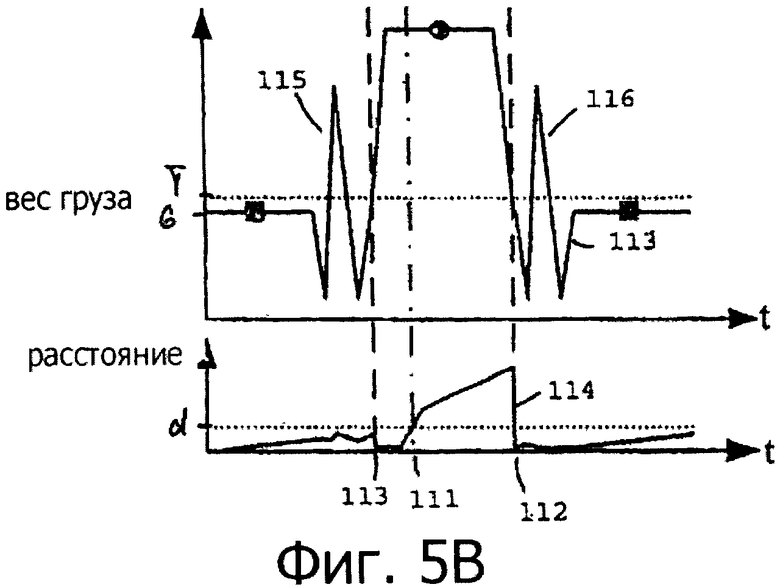
фиг.5а и 5b - сигнал веса груза и боковое перемещение груза в течение цикла загрузки при использовании грузоподъемного крюка и спредера, при этом груз перемещается вверх и вниз многократно, когда его поднимают и ставят вниз;
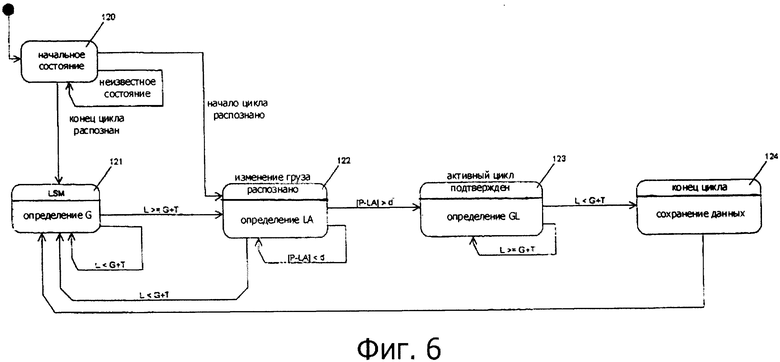
фиг.6 - первый вариант конечного автомата в соответствии с настоящим изобретением;
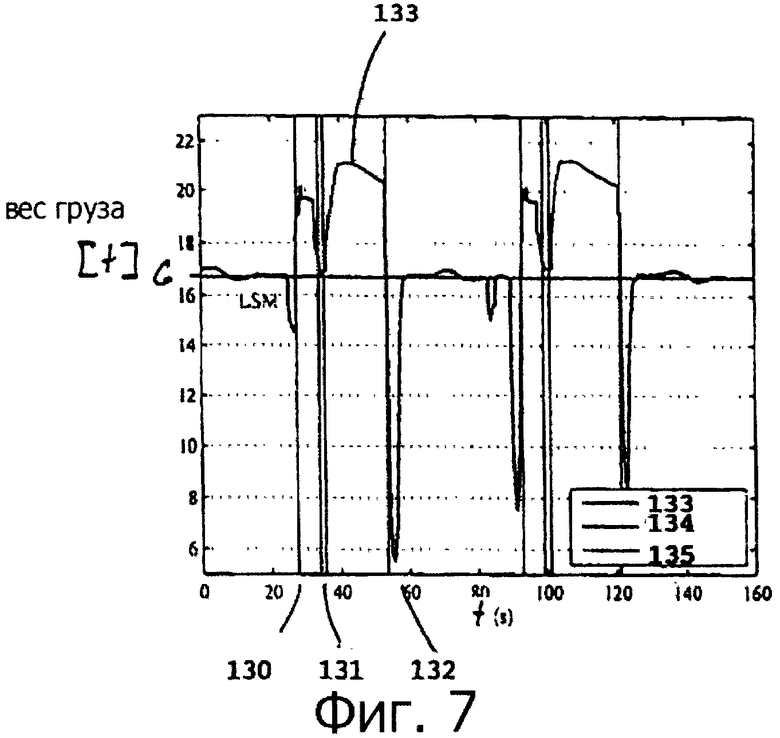
фиг.7 - сигнал веса груза в течение цикла загрузки с динамическими искажениями;
фиг.8 - второй вариант конечного автомата в соответствии с настоящим изобретением;
фиг.9 - сигнал веса груза и боковое перемещение при замене на более легкий грузозахватный орган;
фиг.10 - расширенный конечный автомат, соответствующий первому или второму вариантам;
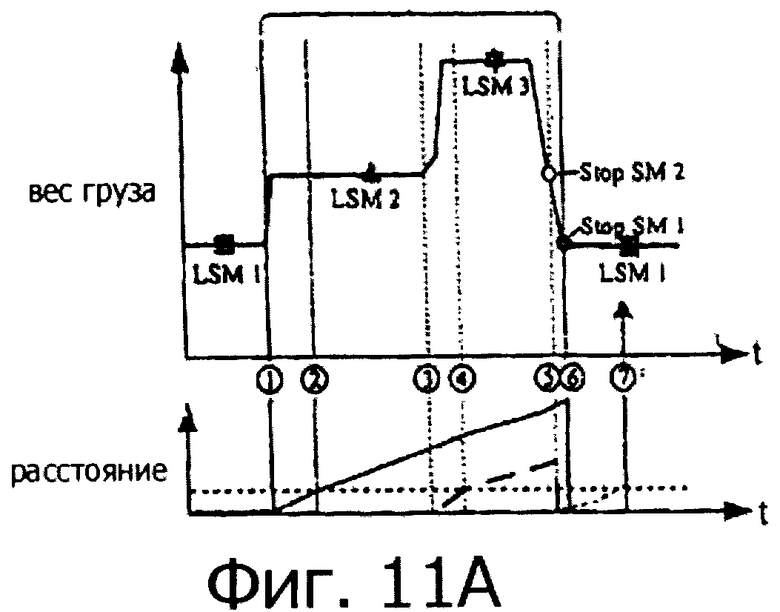
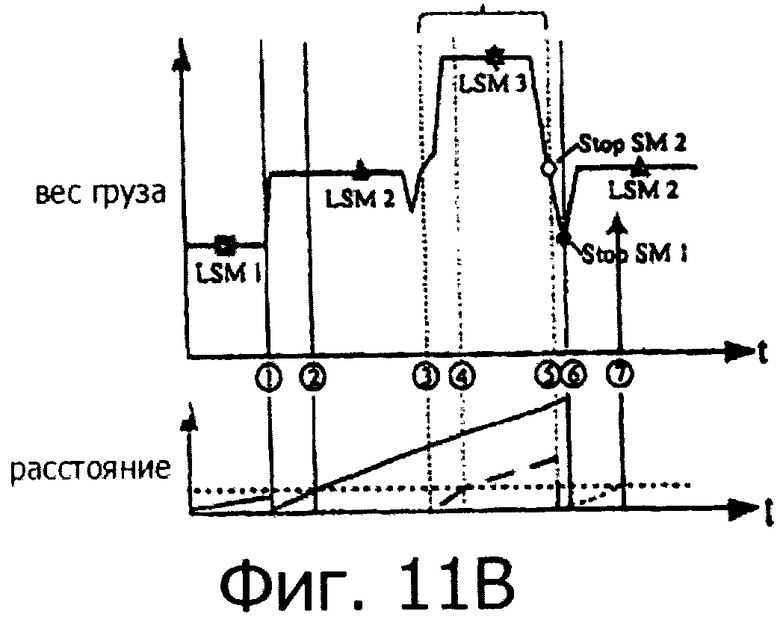
фиг.11а и 11b - сигнал веса груза и боковое перемещение при увеличении длительности активного цикла и замене грузозахватного органа на более тяжелый;
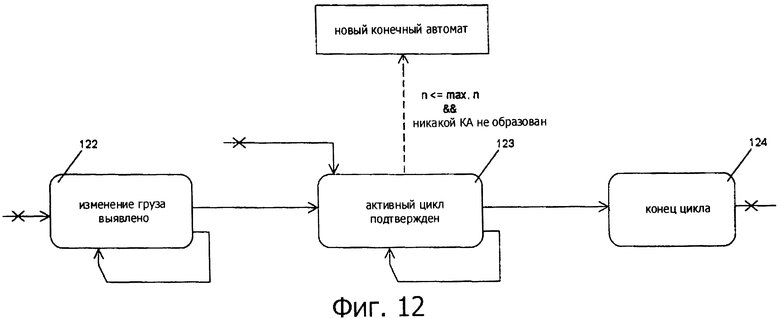
фиг.12 - расширенный конечный автомат, соответствующий настоящему изобретению для распознавания замены грузозахватного органа; и
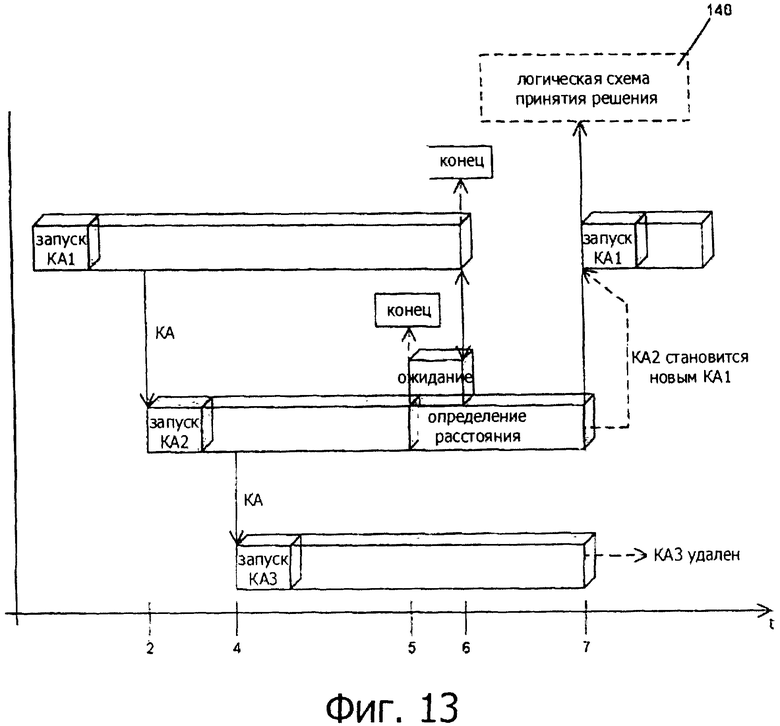
фиг.13 - общее представление логической схемы принятия решения для распознавания замены грузозахватного органа.
На фиг.1 показан вариант машины для перемещения грузов в соответствии с настоящим изобретением, в котором используются вариант системы для автоматического распознавания циклов загрузки в соответствии с настоящим изобретением и вариант системы для распознавания замены грузозахватного органа в соответствии с настоящим изобретением. Машина для перемещения грузов в данном варианте - подъемный кран, в частности портовый самоходный кран. Подъемный кран имеет самоходную часть 1 с шасси 9. Таким образом, подъемный кран может перемещаться в порту. Кроме того, подъемный кран может опираться на опоры 10 в месте подъема груза. Башня 2 установлена на ходовой части 1 с возможностью вращения вокруг вертикальной оси вращения. Стрела 5 подъемного крана соединена с башней 2 с возможностью поворота относительно горизонтальной оси. Стрела 5 может при этом поворачиваться вверх и вниз при изменении угла наклона стрелы с помощью гидравлического цилиндра 7.
Подъемный кран имеет грузоподъемный канат 4, который огибает блок 11 на головке стрелы. Грузозахватный орган 12, с которым груз 3 может подниматься, закреплен на конце грузоподъемного каната 4. Грузозахватный орган 12 или груз 3 поднимается или опускается при движении грузоподъемного каната 4. Изменение положения грузозахватного органа 12 или груза 3 в вертикальном направлении происходит за счет уменьшения или увеличения длины Is грузоподъемного каната 4. Для этого предусмотрена лебедка 13, которая приводит в движение грузоподъемный канат. Лебедка 13 в этом случае установлена в верхней части конструкции. Грузоподъемный канат 4 сначала проходит от лебедки 13 через первый блок 6 на вершине башни 2 к блоку 14 на головке стрелы 5 и оттуда назад к башне 2, где он огибает другой блок 8 и проходит к блоку 11 на головке стрелы, откуда грузоподъемный канат спускается к грузу 3.
Грузозахватный орган 12 или груз, кроме того, может перемещаться в горизонтальном направлении при повороте башни 2 на угол φD и перемещении стрелы 5 подъемного крана вверх и вниз на угол φA. Подъем вверх груза 3, помимо перемещения груза в радиальном направлении, происходит в результате перемещения стрелы 5 крана вверх и вниз с помощью лебедки 13, установленной в верхней части конструкции. Это должно дополнительно корректироваться путем соответствующего управления лебедкой 13.
Типичная картина перемещения машины для перемещения грузов показана на фиг.2. Груз поднимается в точке А, движется по горизонтали по траектории 20 и затем опускается в точке В. Такой цикл подъема груза, перемещения груза в горизонтальном направлении и опускания груза описывает цикл загрузки. В соответствии с известным уровнем техники оператор подъемного крана должен вручную установить триггерный уровень 30 для распознавания такого цикла загрузки. Когда этот триггерный уровень пересекается грузом, отсчитывается новый цикл загрузки, и текущая измеренная масса груза для этого цикла загрузки запоминается. При этом возникает множество проблем, которые были уже описаны более подробно выше.
В соответствии с настоящим изобретением система для автоматического распознавания цикла загрузки в точке А автоматически распознает, что груз был поднят. Средство распознавания цикла загрузки теперь запоминает местоположение груза, точку А в качестве места поднятия груза. Текущее положение груза затем постоянно сравнивается с этим сохраненным в памяти местом поднятия груза. Подъем груза расценивается как новый цикл загрузки, только если груз перемещен на заданное расстояние d по горизонтали от места поднятия груза после подъема. Вместо ручного триггерного уровня 30 предусмотрен автоматически созданный триггерный уровень 40, который автоматически устанавливается вокруг установленного места поднятия груза.
Триггерный уровень 40, таким образом, автоматически формируется в зависимости от установленного места подъема груза. Распознавание цикла загрузки при этом значительно более надежное и, кроме того, может быть выполнено полностью автоматически, без выполнения каких-либо действий оператором подъемного крана.
Загрузка груза распознается автоматически средством обнаружения изменения груза. Распознавание изменения груза выполняется на основании выходных сигналов устройства измерения подъемной силы. Такое устройство измерения подъемной силы может быть установлено, например, в шарнирном соединении лебедки 13 или в шарнирном соединении блока 8. Или как вариант, такое устройство измерения подъемной силы может быть установлено в области грузозахватного органа 12. Расположение устройства измерения подъемной силы на лебедке 13 или на блоке 8 имеет преимущество в том, что не требуется дополнительного прикрепления каната к грузозахватному органу 12. Устройство измерения подъемной силы сначала измеряет силу натяжения в грузоподъемном канате 4 в соответствующем месте измерения. Устройство измерения подъемной силы исходя из этой силы вычисляет массу грузозахватного органа 12 и подвешенного груза 3.
При этом может быть произведена коррекция с учетом веса грузоподъемного каната и трения на блоках. Кроме того, динамические эффекты, которые возникают из-за ускорения груза или из-за качаний, могут быть приняты во внимание при определении массы грузозахватного органа 12 и груза 3. Устройство измерения подъемной силы затем выводит в виде выходного сигнала текущий измеренный вес груза, причем упомянутый вес груза соответствует сумме веса грузозахватного органа 12 и веса груза 3.
Средство распознавания цикла загрузки сначала определяет вес грузозахватного органа 12, как будет показано более подробно далее ниже. Средство определения изменения груза теперь определяет изменение груза на основании веса грузозахватного органа 12 и текущего измеренного веса груза. При этом устанавливается положительное изменение груза, если текущий измеренный вес груза превышает ранее установленный вес грузозахватного органа 12 на определенную величину Т. Например, величина 0,8 т может быть выбрана в качестве величины Т. Отрицательное изменение груза, напротив, устанавливается, если вес груза ниже на пороговую величину Т вышеупомянутого ранее установленного веса грузозахватного органа 12 после положительного изменения груза. Однако автоматическое распознавание цикла загрузки не может быть выполнено надежно исключительно на основании сигналов определения изменения груза, поскольку такое изменение груза может происходить, например, при укладке груза, если груз опускается и поднимается много раз в определенном месте для точного позиционирования, как часто бывает, например, когда контейнеры должны быть установлены друг на друга.
Кроме того, сигнал устройства измерения подъемной силы проводит различие в зависимости от типа подъемника или от типа используемого грузозахватного органа 12. В этой связи на фиг.3а и 3b представлены две типичные кривые выходного сигнала устройства измерения подъемной силы. На фиг.3а показан типичный сигнал веса груза при использовании крюка в качестве отдельного грузозахватного органа. При этом масса самого крюка приблизительно 4т. В момент времени 100 груз, имеющий массу приблизительно 6т, подвешивается на крюк и поднимается, опускается опять в момент времени 101, опять поднимается в момент времени 102 и окончательно опускается в момент времени 103. При этом не может быть установлено на основании одного только этого сигнала, произошел ли один цикл загрузки или два цикла загрузки, или вообще не было цикла загрузки.
На фиг.3b показана типичная кривая сигнала веса груза при использовании спредера, с помощью которого контейнеры могут быть подняты и опущены. Спредер подвешивается на крюк подъемного крана и сам имеет массу примерно 13т, так что вес грузозахватного органа получается приблизительно 17т вместе с весом крюка. Спредер устанавливается на контейнере для подъема контейнера в момент времени 104. Текущий измеренный вес груза при этом сильно падает, поскольку контейнер поддерживает, по меньшей мере, часть веса спредера. При последующем подъеме контейнера вес груза возрастает до величины приблизительно 33т. Затем контейнер опускается вниз в выбранное место. Несколько выбросов измеренной силы получается из-за того, что контейнер поднимается и опускается несколько раз для того, чтобы его точно установить, например, на другой контейнер. Контейнер, например, сначала опускают, а затем поднимают в момент времени 105. Контейнер окончательно опускается только в момент времени 106. При размещении внизу вес груза опять падает ниже веса грузозахватного органа, так как он опирается на контейнер. Изображение, как на фиг.3b, также возникает, когда грейфер, который сначала лежит на насыпном грузе, используется в качестве грузозахватного органа при подъеме насыпного груза.
Распознавание цикла загрузки в соответствии с настоящим изобретением для двух случаев, приведенных на фиг.3а и 3b, схематически показано на фиг.4а и 4b. Средство распознавания цикла загрузки сначала определяет вес G грузозахватного органа, когда еще никакой груз не был поднят. Как только измеренный на тот момент вес груза 113 превышает установленный вес G грузозахватного органа на величину Т, устанавливается положительное изменение груза. Это происходит в обоих случаях в момент времени 110. Если установлено изменение груза, запоминается местоположение груза или грузозахватного органа. Однако положительное изменение груза в момент времени 110 оценивается в качестве начала нового цикла загрузки лишь в момент времени 111. Для этого текущее местоположение 114 груза или грузозахватного органа сравнивается с местом поднятия груза. Только после того как груз или грузозахватный орган были перемещены на расстояние d по горизонтали относительно места поднятия груза, предыдущее положительное изменение груза оценивается как начало нового цикла загрузки.
Конец цикла загрузки распознается в момент времени 112, когда происходит отрицательное изменение груза, при котором текущий измеренный вес груза 113 опять падает ниже пороговой величины Т, которая выше веса G грузозахватного органа.
Можно теперь понять из фиг.5а и 5b, почему этот автоматически созданный триггерный уровень для горизонтального или бокового перемещения от места поднятия груза увеличивает точность распознавания цикла загрузки и не допускает ошибок, связанных с признанием в качестве новых циклов загрузки изменения груза при подъеме и опускании груза.
На фиг.5а и 5b груз вначале был поднят, а затем опять опустился во время перемещения груза. Пики груза 115, которые превышают величину Т, превосходящую вес G грузозахватного органа, возникают в сигнале веса груза 113. В этой связи соответствующие положительные изменения груза распознаются, и текущее местоположение груза запоминается как место поднятия груза. Однако, как можно заметить по кривой 114 местоположения, груз вначале только слегка сдвигается по горизонтали после первого положительного изменения груза так, что не преодолевает расстояние d от сохраненного в памяти места поднятия груза. Поскольку отрицательное изменение груза происходит после первого положительного изменения груза, при котором груз не проходит триггерный уровень по горизонтали, этот первый груз далее не принимается во внимание.
Только положительное изменение груза во время повторного прохождения грузового порога в момент времени 110 оценивается как начало активного цикла загрузки, так как груз преодолел расстояние d от сохраненного в памяти места поднятия груза в момент времени 111. Конец этого активного цикла загрузки затем распознается в момент времени 112, когда происходит отрицательное изменение груза.
Изменения груза 116, которые подобным образом происходят во время опускания груза, также не оцениваются как начало нового активного цикла загрузки, поскольку груз не был перемещен на расстояние d до достижения следующего отрицательного изменения груза.
На чертежах для простоты представления состояния в нижней диаграмме соответствующее боковое расстояние груза вводится после последнего (положительного или отрицательного) изменения груза.
На фиг.6 показан конечный автомат, с помощью которого было выполнено распознавание цикла в соответствии с настоящим изобретением. Конечный автомат, во-первых, имеет начальное состояние 120, в котором устройство запускается. В зависимости от того, выявлен конец цикла или начало цикла, устройство далее переключается в состояние 121 и 122.
Фактический конечный автомат для распознавания цикла загрузки образован состояниями от 121 до 124.
В состоянии 121 конечный автомат предполагает, что никакого груза не подвешено на грузоподъемном канате и, таким образом, вес груза соответствует весу G грузозахватного органа (СПГ). В этом состоянии средство распознавания цикла загрузки определяет вес G грузозахватного органа. При этом вес G грузозахватного органа, по меньшей мере, определяется каждый раз, когда конечный автомат переключается из окончания цикла 124 в состояние 121, в котором груз не подвешен к грузозахватному органу. Вес G грузозахватного органа также может определяться каждый раз, когда произошло изменение в состояние 121. Ручная калибровка системы, таким образом, больше не требуется. Система точнее автоматически определяет вес грузозахватного органа.
Определение веса G груза грузозахватного органа может в этой связи происходить с помощью программы фильтрации среднего значения. Вычисление среднего значения предпочтительно выполняется только по тем периодам времени, когда текущий вес L груза находится в определенном диапазоне около ранее установленного веса G грузозахватного органа. Значения текущего измеренного веса L груза, которые находятся, в частности, в диапазоне G-T/, не принимаются в расчет при вычислении среднего значения. В других случаях, с грузозахватными органами, которые создают сигналы веса груза, как показано на фиг.3b и 4b, вес G грузозахватного органа был бы определен слишком низким. Более низкое пороговое значение Т/ может быть выбрано, например, равным пороговому значению Т для распознавания положительного изменения груза.
Средство распознавания изменения груза постоянно контролирует текущий вес груза и сравнивает его с весом G грузозахватного органа. Пока текущий вес груза не превысит вес G на величину Т, т.е. пока не обнаружено положительного изменения груза, конечный автомат остается в состоянии 121.
Если обнаружено положительное изменение груза, конечный автомат переключается в состояние 122. В этом состоянии распознается положительное изменение груза, поэтому возможно происходит активный цикл. При переключении между состоянием 121 и состоянием 122, т.е. при обнаружении положительного изменения груза, местоположение груза или грузозахватного органа одновременно запоминаются в качестве места поднятия груза LA. Система теперь постоянно сравнивает текущее местоположение Р груза или грузозахватного органа с сохраненным в памяти местом поднятия груза LA и определяет перемещение [P-LA] груза в горизонтальном направлении от места поднятия груза. Пока это боковое перемещение [P-LA] меньше, чем минимальное расстояние d, которое используется как триггерный уровень, конечный переменный автомат остается в состоянии 122. Кроме того, постоянно определяется вес груза L. Если он падает ниже, чем величина G+T, конечный переменный автомат переключается назад в состояние 121.
Если, наоборот, боковое перемещение [P-LA] превышает минимальное расстояние d, когда конечный автомат в состоянии 122, тогда конечный переменный автомат переключается в состояние 123. Тем самым подтверждается, что присутствует активный цикл. Последнее произошедшее положительное изменение груза идентифицируется как начало активного цикла. Когда конечный переменный автомат находится в состоянии 123, определяется вес GL груза. Для этого вес G грузозахватного органа вычитается из текущего измеренного веса L. Вычисление среднего значения может быть выполнено с помощью программы фильтрации среднего значения относительно веса L груза. Кроме того, программа фильтрации среднего значения может корректироваться или перезапускаться при резком увеличении веса груза.
Конечный автомат контролирует текущий вес L груза и непрерывно сравнивает его с весом G грузозахватного органа. Как только текущий вес груза опять падает ниже величины G+T, конечный автомат переключается из состояния 123 в состояние 124, так что конец активного цикла распознан. В состоянии 124 данные о только что закончившемся активном цикле сохраняются. Это может быть, в частности, вес GL груза, а также дополнительные данные по только что закончившемуся активному циклу. Например, место поднятия груза и время поднятия груза могут быть сохранены. Кроме того, могут быть сохранены место и, при желании, время конца цикла. Помимо всего прочего или альтернативно могут быть сохранены длительность цикла, расстояние, пройденное в течение цикла, максимальное или минимальное значение веса груза и т.п.
После сохранения данных конечный автомат из состояния 124 переключается назад в состояние 121, которое соответствует состоянию без подвешенного груза. Теперь определяется вес G грузозахватного органа.
Проблема с представленным распознаванием цикла загрузки может быть связана с изменением веса груза из-за динамических перемещений груза, которые происходят, когда груз подвешен на тросе подъемного крана и перемещается. Такие изменения груза могут возникать, например, из-за колебаний груза. На фиг.7 показан пример такой кривой веса груза. Вес груза представлен сплошной линией 133. Положительные изменения груза представлены сплошными вертикальными линиями 134; отрицательные изменения груза - пунктирными линиями 135. Положительное изменение груза распознается в момент времени 130. Груз перемещается в поперечном направлении, так что это положительное изменение груза распознается как начало активного цикла загрузки. В момент времени 131 вес груза колеблется очень сильно из-за динамических процессов, так что он резко падает ниже предельной величины G+T. Поэтому сначала здесь распознается отрицательное изменение груза, а положительное изменение груза сразу же потом.
В результате этого в конечном автомате, приведенном на фиг.6, при отрицательном изменении груза устанавливается конец цикла. Поскольку груз перемещен в поперечном направлении сразу же после положительного изменения груза, это положительное изменение груза также распознается как начало нового активного цикла загрузки. Поэтому конечный автомат, приведенный на фиг.6, ошибочно расценил бы цикл загрузки, приведенный на фиг.7, как два отдельных цикла загрузки из-за динамических изменений груза в момент времени 131.
Во избежание таких ошибок может быть использован следующий критерий для распознавания начала и конца активного цикла загрузки. С этой целью не только текущее положение груза или грузозахватного органа сохраняется при определении положительного изменения груза, но также определяется скорость в горизонтальном направлении груза или грузозахватного органа. Только если эта скорость v ниже определенной пороговой величины r, это положительное изменение груза может соответствовать началу нового активного цикла загрузки. Если, наоборот, скорость v выше определенной пороговой величины r, устройство решает, что была динамическая проблема и продолжается предыдущий активный цикл загрузки.
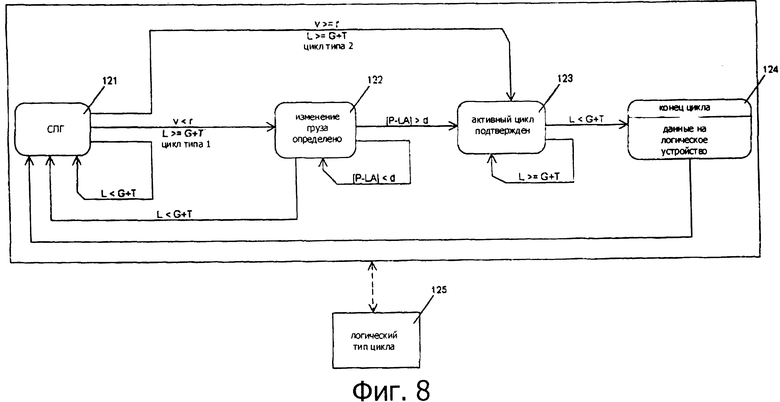
Развернутый вид конечного автомата, приведенного на фиг.6, в котором учтен этот дополнительный критерий, показан на фиг.8. Состояния 121-124 по существу работают, как было показано со ссылкой на фиг.6. Дополнительный критерий учитывается, если положительное изменение груза было идентифицировано в состоянии 121. Если во время положительного изменения груза скорость v в поперечном направлении меньше чем r, конечный автомат переключается, как и прежде, в состояние 122. При этом сохраняется цикл типа 1.
Если, наоборот, конечный автомат в состоянии 121 определяет, что скорость v в поперечном направлении больше, чем пороговое значение r при положительном изменении груза, конечный автомат переключается непосредственно в состояние 123. Кроме того, сохраняется цикл типа 2.
Благодаря сохранению соответствующего типа цикла можно определить, начат ли новый активный цикл загрузки или продолжается ранее начатый активный цикл. С этой целью состояние 124, т.е. состояние, переключенное во время отрицательного изменения груза из состояния 123, пересылает свои данные логической схеме 125. Логическая схема 125 ждет, чтобы выяснить, какой тип цикла сохраняется при следующем переключении из состояния 121. Если сохраняется цикл типа 1, логическая схема оценивает данные для предыдущего цикла как данные законченного активного цикла. Если, наоборот, сохранен цикл типа 2, логическая схема 125 оценивает данные последнего цикла только как часть текущего активного цикла.
Логическая схема 125 необходима, поскольку нет никакого критерия относительно скорости грузозахватного органа или груза в конце цикла 124. Возможно, что грузозахватный орган движется дальше во время разгрузки груза, например, когда насыпной груз распределяется с помощью грейфера по более длинному участку. Поэтому конечный автомат всегда переключается из состояния 123, т.е. из активного цикла, в конец цикла, если груз уменьшается ниже пороговой величины G+T. Затем логическая схема определяет на основании следующего перехода из состояния 121 в состояние 122 или непосредственно в состояние 123, действительно ли это был конец активного цикла загрузки или же последний активный цикл загрузки продолжается.
Ранее предполагалось, что конечный автомат сначала знает, что он в состоянии 121, и таким образом можно автоматически определить вес G грузозахватного органа. Теперь будет показано, как работает система для автоматического распознавания замены грузозахватного органа. Простейший случай, в котором выполняется замена более тяжелого грузозахватного органа на более легкое, представлена более подробно со ссылками на фиг.9.
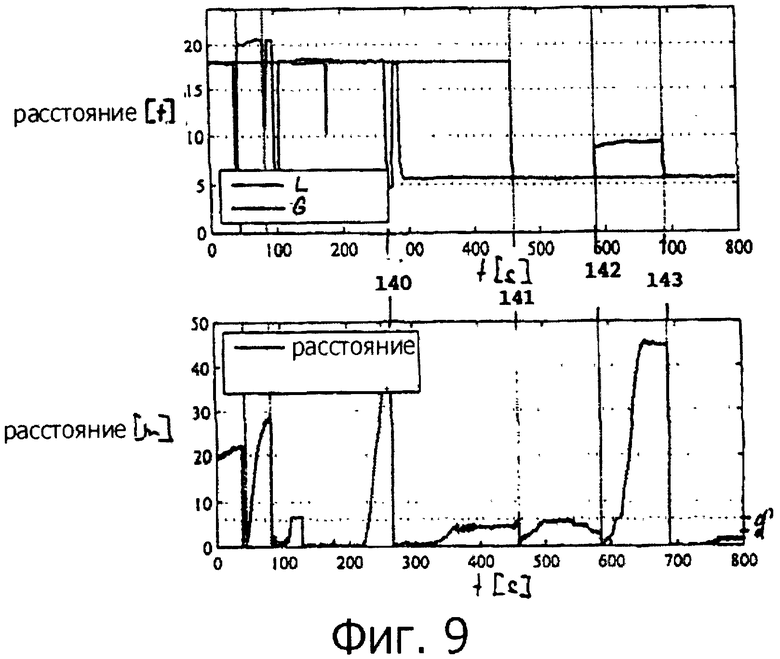
Сигнал L веса груза и вес G, которые устройство принимает, введены наверху на фиг.9. Поперечное расстояние, которое грузозахватный орган или груз проходят после каждого изменения груза, введено внизу. Замена грузозахватного органа происходит в момент времени 140. До этого времени вес G, который система определила для грузозахватного органа, соответствует текущему измеренному весу L груза.
Теперь система определяет отрицательное изменение груза в состоянии 121, в котором никакой груз не подвешен к грузозахватному органу. Это отрицательное изменение груза из состояния 121 устанавливается, если текущий вес L груза падает ниже ранее установленного веса G грузозахватного органа на величину Т/. Пороговая величина Т/ может быть выбрана такой же по величине, как и пороговая величина Т, например, 0,8 т. В это время вычисление среднего значения для веса G грузозахватного органа приостановлено, так что вначале постоянно сохраняется последнее установленное значение.
Определение того, что действительно произошла замена грузозахватного органа или же оно было, например, только опущено, происходит посредством наблюдения за поперечным расстоянием, на которое грузозахватный орган перемещается с момента обнаружения отрицательного изменения груза. С этой целью во время определения отрицательного изменения груза из состояния 121 местоположение грузозахватного органа запоминается как местоположение размещения грузозахватного органа. Теперь система проверяет, преодолевает ли грузозахватный орган расстояние более чем d/ в горизонтальном направлении относительно местоположения размещения грузозахватного органа. Если грузозахватный орган преодолевает такое расстояние без положительного изменения груза, за это время система оценивает это как замену грузозахватного органа и обновляет вес G грузозахватного органа в соответствии с текущим измеренным весом L груза.
Это показано на фиг.9 в момент времени 141, при котором поперечное расстояние, показанное в нижней части, от местоположения отрицательного изменения груза в момент времени 140, больше чем пороговая величина d/. Величина, большая, чем d, например, удвоенное d, предпочтительно выбирается в качестве пороговой величины d/. С момента времени 141 конечный автомат работает с новым грузозахватным органом, меньшего веса G. Таким образом, на момент 142 положительное изменение веса идентифицировано, поскольку текущий вес груза превышает обновленную величину G+T. Этот новый цикл затем подтверждается в качестве активного цикла, как обычно, на основании поперечного перемещения, а окончание 143 этого активного цикла распознается на основании отрицательного изменения груза.
Если бы текущий сигнал веса груза наоборот возрос выше G-T/ снова после отрицательного изменения груза в состоянии 121 без поперечного перемещения большего, чем d/, система отбросила бы отрицательное изменение груза и продолжала бы работать с ранее установленным весом G грузозахватного органа.
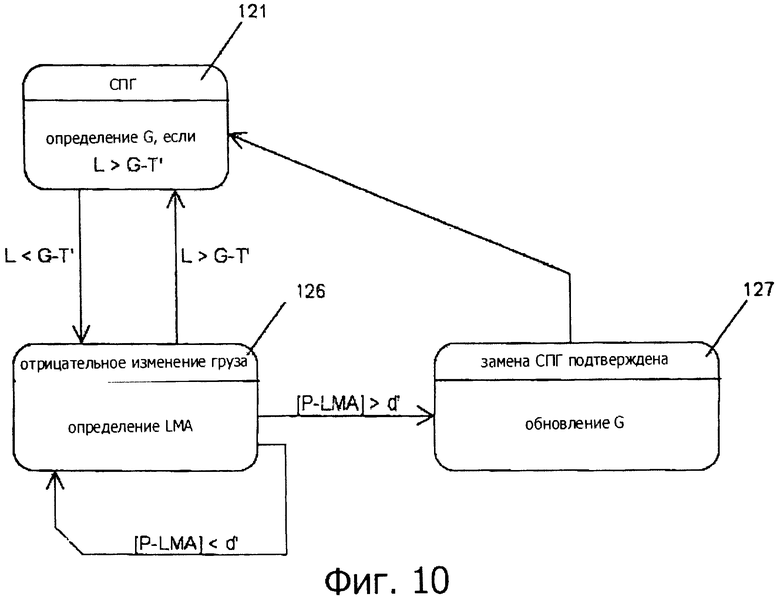
Автоматическое распознавание замены на более легкое грузозахватный орган может происходить за счет расширения конечного автомата, показанного на фиг.8. Расширение конечного автомата в этой связи приведено на фиг.10, при этом также приведено для ясности только состояние 121 из фиг.8. Вес G определяется вычислением среднего значения в состоянии 121. При этом, однако, принимаются во внимание только те периоды, в которых текущий вес L не падает ниже определенной пороговой величины Т/, ниже установленного ранее веса груза G, т.е. пока L больше чем G-Т/.
Если текущий измеренный вес груза, напротив, падает ниже G-T/, из состояния 121 распознается отрицательное изменение груза. Затем система переключается в состояние 126. На этом переходе местоположение грузозахватного органа в момент отрицательного изменения груза определяется в качестве места размещения грузозахватного органа LMA. В состоянии 126 проверяется, было ли поперечное перемещение грузозахватного органа на расстояние свыше, чем d/, относительно места размещения грузозахватного органа LMA.
Пока расстояние от грузозахватного органа до места размещения грузозахватного органа [P-LMA] меньше, чем d/, система остается в состоянии 126. При этом продолжается мониторинг: превышает ли опять текущий вес груза пороговое значение G-Т/. Если вес груза L снова превышает G-Т/, положительное изменение груза распознается, и конечный автомат опять переключается в состояние 121. Ранее установленный вес G грузозахватного органа тогда остается и вычисление среднего значения продолжается.
Если, напротив, система распознает в состоянии 126, что грузозахватный орган был перемещен из места размещения грузозахватного органа на расстояние d/, она переключается в состояние 127 и тем самым подтверждает замену на более легкий грузозахватный орган. Вес G грузозахватного органа вслед за этим обновляется, чтобы представлять теперь более низкую величину. Система затем опять переключается в состояние 121 и остается теперь с обновленным весом G грузозахватного органа.
Расширение конечного автомата, приведенное на фиг.10, однако, позволяет осуществлять автоматическое распознавание замены только на более легкий грузозахватный орган.
Основные проблемы, связанные с заменой на более тяжелый грузозахватный орган, описаны более подробно со ссылками на фиг.11а и 11b. На фиг.11а приведен цикл, при котором груз поднимается в момент времени 1. При этом груз, например, остается частично поднятым в течение еще некоторого времени, так что вес груза снова значительно увеличивается в момент 3. Затем груз опять опускают в момент времени 6.
На фиг.11b, наоборот, замена с первого грузозахватного органа на второй, более тяжелый грузозахватный орган происходит в момент времени 1. Затем в момент времени 3 груз поднимается со вторым грузозахватным органом. Он опускается опять в момент времени 5, при этом грузозахватный орган опирается на груз и текущая измеренная величина груза продолжает уменьшаться.
Поэтому нет возможности различить пошаговое возрастание веса груза, показанное на фиг.11а, и замену грузозахватного органа, показанную на фиг.11b, до момента времени 6, поскольку кривая сигнала по существу одинаковая. Несмотря на это, можно отличить эти две ситуации друг от друга и надежно установить замену на более тяжелый грузозахватный орган, если используется несколько конечных автоматов, функционирующих параллельно. Каждый отдельный конечный автомат работает, как показано на фиг.8 и фиг.10.
Как показано на фиг.12, всегда, когда происходит переключение из состояния 122 в состояние 123 и активный цикл загрузки подтверждается после идентификации положительного изменения груза, формируется новый конечный автомат. Однако может быть максимальное число nmax конечных автоматов, которым разрешено функционировать параллельно. Поэтому новый конечный автомат запускается в каждом случае, на фиг.11а и 11b, в момент времени 2, когда подтверждается активный цикл загрузки. При этом новый конечный автомат, в свою очередь, стартует в состоянии 121 и поэтому распознает более высокий вес груза, который измерен в момент 1 после положительного изменения груза, как вес G грузозахватного органа. В момент времени 3 второй конечный автомат распознает положительное изменение груза, которое в каждом случае подтверждается в момент времени 4. Вслед за этим запускается третий конечный автомат, который, в свою очередь, стартует в состоянии 121 и соответственно фиксирует более высокий вес груза как вес G грузозахватного органа.
В момент времени 5 второй конечный автомат КА2 теперь распознает конец активного цикла и переключается в состояние 124. Устройство, однако, первоначально не знает, действительно ли это соответствует окончанию фактически текущего цикла загрузки. Поэтому устройство выжидает определенный промежуток времени k, после того как первый конечный автомат распознает конец активного цикла. Если никакой следующий конечный автомат не сообщает о конце активного цикла загрузки за этот промежуток времени k, который может, например, быть равным 2,5 с, система предполагает, что конечный автомат, который сообщил о конце цикла загрузки, соответствует фактическому циклу загрузки. Все остальные конечные автоматы могут быть удалены.
В данном случае, напротив, первый конечный автомат КА1 аналогичным образом сообщает об окончании своего активного цикла загрузки в промежуток времени k. Поэтому первоначально не может быть определено, который из двух конечных автоматов представляет фактическое состоянии системы.
Поэтому местоположение грузозахватного органа или груза определяется в момент времени, когда впервые регистрируется конец активного цикла загрузки. После того как грузозахватный орган перемещен на расстояние d// относительно этого местоположения в поперечном направлении, в момент времени 7, может быть принято решение о том, какой автомат представляет реальное состояние. Это делается путем сравнения текущего измеренного веса груза с весом G грузозахватного органа, определенного соответствующим конечным автоматом.
Поэтому, если грузозахватный орган было перемещено на расстояние d// после распознавания конца первого цикла, система определяет разность между текущим измеренным весом L груза и величиной G веса грузозахватного органа для каждого конкретного конечного автомата, который распознал конец цикла. Конечный автомат, у которого эта разность наименьшая, тогда рассматривается как конечный автомат, который соответствует реальному состоянию.
В случае на фиг.11а это первый конечный автомат КА1 (SM1); в случае на фиг.11b - второй конечный автомат КА2 (SM2).
Кроме того, в случаях, когда первый конечный автомат изменяет вес G грузозахватного органа на меньшую величину, которая соответствует весу G в другом конечном автомате, система устанавливает, что этот первый конечный автомат не идентифицировал реальную ситуацию. Затем этот конечный автомат удаляется. Две величины G веса груза в этом смысле находятся в соответствии, если их разница, например, не больше чем Т.
Процедура распознавания замены на более тяжелый грузозахватный орган описана далее более подробно со ссылками на фиг.13, на которой приведена ситуация фиг.11b. В момент времени 5, когда конечный автомат КА2 (SM2) регистрирует конец своего активного цикла, сначала включается таймер и одновременно определяется местоположение грузозахватного органа в момент времени 5. Поскольку первый конечный автомат 1 также сигнализирует о конце своего активного цикла в течение промежутка времени k, решение может быть принято только после того, как устройство имеет перемещенное расстояние d//. Расстояние d// в этой связи может быть равно расстоянию d. При этом расстояние d// может быть меньше, чем расстояние d/. Если грузозахватный орган переместился на пороговое расстояние d// с момента подачи сигнала о первом конце активного цикла загрузки, логическая схема 140 принятия решений решает, какой из конечных автоматов представляет реальное состояние.
При этом выбирается конечный автомат, у которого величина G веса груза для грузозахватного органа ближе всего к текущему измеренному весу L груза. В случае фиг.11b это конечный автомат КА2. Теперь он продолжает работать как единственный конечный автомат, а все другие конечные автоматы удаляются.
В случае варианта фиг.11а, наоборот, величина G первого конечного автомата КА1 была бы ближе к текущему измеренному весу груза в момент времени 7, так что логические схемы 140 принятия решений идентифицировали бы первый конечный автомат как конечный автомат, который передает реальное состояние, и оставили бы работать только его.
Настоящее изобретение, таким образом, позволяет автоматически идентифицировать и заменять грузозахватные органы без установки датчиков в грузозахватных органах. Распознавание происходит исключительно на основании сигнала устройства измерения подъемной силы, а также на основании перемещений машины для перемещения грузов. Изменение веса грузозахватного органа, таким образом, может быть автоматически распознано всякий раз, когда заменяются грузозахватные органы.
Распознавание цикла в соответствии с настоящим изобретением позволяет очень надежно и точно выявлять циклы загрузки. Данные, накопленные при распознавании циклов в соответствии с настоящим изобретением, могут использоваться для выполнения различных функций.
Изобретение относится к системе для автоматического распознавания циклов загрузки машины для перемещения грузов. Система содержит средство определения изменения груза, устройство измерения подъемной силы, средство определения местоположения груза, средство распознавания цикла загрузки. Средство распознавания цикла загрузки автоматически распознает цикл загрузки исходя из выходных сигналов средства определения изменения груза и средства определения местоположения груза. Средство распознавания цикла загрузки определяет местоположение груза как место поднятия груза при выявлении положительного изменения груза. Средство распознавания цикла загрузки оценивает положительное изменение груза в качестве начала нового цикла загрузки исходя из запроса, касающегося выполнения условия, что груз перемещен на заданное расстояние по горизонтали от места поднятия груза. Предложены также способ работы системы распознавания циклов загрузки и способ работы системы для автоматического распознавания замены грузозахватного органа, а также система для автоматического распознавания замены грузозахватного органа, машина для перемещения грузов. Достигается автоматическое распознавание циклов загрузки и веса грузозахватного органа. 5 н. и 11 з.п. ф-лы, 13 ил. 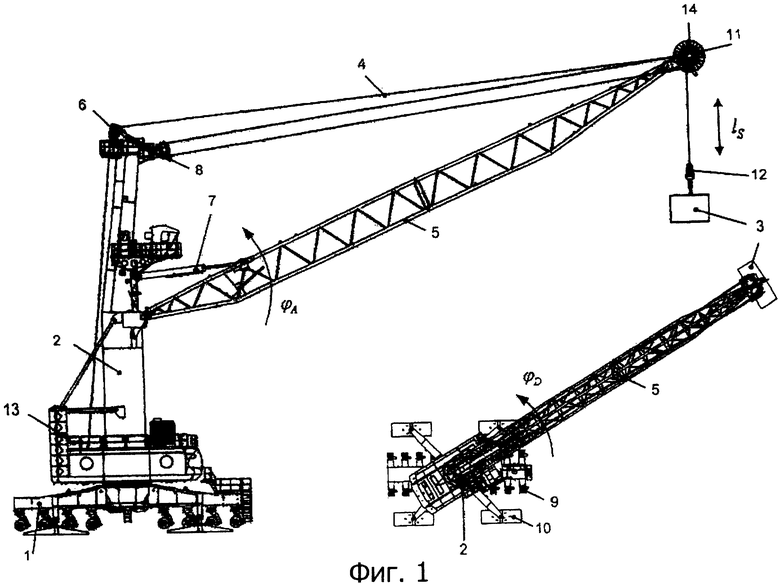
1. Система для автоматического распознавания циклов загрузки машины для перемещения грузов, включающей подъемное устройство для подъема груза и устройство перемещения для горизонтального перемещения груза, содержащая: средство определения изменения груза для автоматического определения изменения груза, по меньшей мере, исходя из выходных сигналов устройства измерения подъемной силы; средство определения местоположения груза, выполненное с возможностью определения местоположения груза, по меньшей мере, в горизонтальном направлении; и средство распознавания цикла загрузки для автоматического распознавания цикла загрузки, по меньшей мере, исходя из выходных сигналов средства определения изменения груза и средства определения местоположения груза, отличающаяся тем, что средство распознавания цикла загрузки выполнено с возможностью определения местоположения груза как места поднятия груза при выявлении положительного изменения груза; и с возможностью оценивания положительного изменения груза в качестве начала нового цикла загрузки исходя из запроса, касающегося выполнения условия, что груз перемещен на заданное расстояние по горизонтали от места поднятия груза.
2. Система по п.1, отличающаяся тем, что содержит средство определения скорости груза, выполненное с возможностью определять скорость груза, по меньшей мере, в горизонтальном направлении, причем средство распознавания цикла загрузки выполнено с возможностью распознавания цикла загрузки исходя из выходных сигналов средства определения скорости груза, а также с возможностью оценивания положительного изменения груза в качестве начала нового цикла загрузки исходя из запроса, касающегося выполнения условия, что скорость груза не превысила заданную величину во время положительного изменения груза.
3. Система по п.1, отличающаяся тем, что средство распознавания цикла загрузки выполнено с возможностью выявлять конец активного цикла загрузки исходя из запроса, касающегося выполнения условия, что произошло отрицательное изменение груза.
4. Система по п.1, отличающаяся тем, что средство распознавания цикла загрузки выполнено с возможностью распознавания цикла загрузки с учетом системы распознавания состояния, которая имеет, по меньшей мере, следующие состояния: без груза; положительное изменение груза выявлено; активный цикл загрузки подтвержден.
5. Система по п.1, отличающаяся тем, что средство распознавания цикла загрузки выполнено с возможностью определения веса груза исходя из выходных сигналов устройства измерения подъемной силы путем определения средней величины за активный цикл загрузки или за часть активного цикла загрузки.
6. Система по п.1, отличающаяся тем, что содержит блок распознавания грузозахватного органа, выполненный с возможностью автоматического определения веса грузозахватного органа.
7. Система для автоматического распознавания замены грузозахватного органа в машине для перемещения грузов, содержащей подъемное устройство для подъема груза, характеризующаяся тем, что включает в себя: устройство для измерения подъемной силы и блок распознавания грузозахватного органа, выполненный с возможностью автоматического выявления замены грузозахватного органа, по меньшей мере, исходя из выходных сигналов устройства измерения подъемной силы.
8. Система по п.7, характеризующаяся тем, что дополнительно содержит дополнительное средство определения местоположения, выполненное с возможностью определения местоположения грузозахватного органа, по меньшей мере, в горизонтальном направлении, при этом блок распознавания грузозахватного органа выполнен с возможностью автоматического выявления замены грузозахватного органа, по меньшей мере, исходя из выходных сигналов устройства измерения подъемной силы и исходя из данных средства определения местоположения.
9. Система по п.7 или 8, в которой распознавание грузозахватного органа происходит на основании распознавания цикла загрузки, в частности на основании системы по любому из пп.1-6, при этом блок распознавания грузозахватного органа предпочтительно определяет местоположение грузозахватного органа при выполнении следующего условия: произошло отрицательное изменение груза при отсутствии активного цикла; причем отрицательное изменение груза оценивается как замена грузозахватного органа на более легкий на основании запроса, касающегося выполнения следующего условия: после отрицательного изменения груза грузозахватный орган перемещался на заданное расстояние по горизонтали от сохраняемого в памяти местоположения.
10. Система по п.7, в которой блок распознавания грузозахватного органа выполнен с возможностью распознавания замены грузозахватного органа на основе множества дискретных конечных автоматов, функционирующих параллельно, при этом состояние автоматов контролируется логической схемой управления более высокого уровня.
11. Система по п.7, в которой средство распознавания цикла загрузки выполнено с возможностью сохранять данные по циклу загрузки для каждого распознанного цикла загрузки в базе данных, при этом база данных дает возможность выполнения отложенной оценки данных.
12. Система по п.11, в которой данные по циклу загрузки включают в себя следующие данные: вес груза, и/или продолжительность цикла загрузки, и/или место начала и остановки, и/или время начала и остановки, и/или вес грузозахватного органа, и/или минимальную и максимальную величину груза за время загрузочного цикла, и/или пройденное расстояние, и/или технические характеристики машины или приводов машины.
13. Система по п.11, в которой оценка данных включает в себя определение следующих данных: потребление энергии/топлива, и/или полный вес перемещенного груза, и/или средние характеристики переноса, и/или показатели мощности/ производительности.
14. Машина для перемещения грузов, содержащая систему для автоматического распознавания циклов загрузки по любому из пп.1-6.
15. Способ работы системы для автоматического распознавания циклов загрузки машины для перемещения грузов по любому из пп. 1-6, характеризующийся тем, что
с помощью устройства измерения подъемной силы непрерывно измеряют вес груза, который поднят устройством для подъема груза, и формируют выходной сигнал, соответствующий измеренному весу груза,
с помощью средства определения местоположения груза определяют текущее местоположение груза, в которое перемещен груз устройством перемещения, по меньшей мере, в горизонтальном направлении, и формируют выходной сигнал, соответствующий текущему местоположению,
с помощью средства определения изменения груза определяют, произошло ли изменение груза на основании, по меньшей мере, указанного выходного сигнала устройства измерения подъемной силы,
с помощью средства распознавания цикла загрузки выполняют распознавание цикла загрузки, по меньшей мере, на основании указанных выходных сигналов средства определения изменения груза и средства определения местоположения груза, при этом
определяют местоположение груза как место поднятия груза при условии положительного изменения груза, а
при одновременном выполнении условий: положительное изменение груза и перемещение груза на заданное расстояние по горизонтали от указанного места поднятия груза - оценивают указанное положительное изменение груза как начало нового цикла загрузки.
16. Способ работы системы для автоматического распознавания замены грузозахватного органа в машине для перемещения грузов по любому из пп. 7-13, характеризующийся тем, что с помощью устройства измерения подъемной силы непрерывно измеряют вес груза, который поднят подъемным устройством, при этом вес груза включает вес грузозахватного органа, и формируют выходной сигнал, соответствующий текущему весу груза, и с помощью блока распознавания грузозахватного органа выявляют замену грузозахватного органа исходя, по меньшей мере, из указанных выходных сигналов устройства измерения подъемной силы.
| Устройство для смешивания и гранулирования | 1983 |
|
SU1150019A1 |
| EP 1103511 A2, 30.05.2001 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

