Изобретение относится к авиационной технике, в частности к блокам ориентации самолетов и вертолетов.
Известен блок ориентации курсовой системы [1], содержащий инерциальный измерительный блок с входящими в него вычислителем, преобразователем и индукционный магнитный датчик.
Недостатком данного устройства, как и способа его реализующего, является отсутствие в нем калибровки индукционного магнитного датчика.
Известен способ компенсации девиации магнитного компаса на самолете [2], заключающийся в определении путем последовательной установки самолета на восемь основных магнитных курсов с одновременным отсчетом компасных курсов с занесением в таблицу для последующего использования в полете.
Недостатком данного способа является значительная погрешность в компенсации девиации из-за неточности установки самолета на магнитный курс.
Известен также блок ориентации [3], содержащий первый и второй инерциальные измерительные блоки, соединенные функционально с магнитометром, в котором способ калибровки заключается в том, что летательный аппарат (ЛА) устанавливают на заранее известный курс, затем магнитный курс, вычисленный по информации с магнитометра, сравнивается с тем, на котором установлен ЛА, а разность заносится в постоянное запоминающее устройство, затем разворачивая ЛА на углы 0°, 45°…315°, повторяют измерения.
Недостатком данного устройства, как и способа его калибровки является то, что из-за наличия на объекте изменяющегося во времени паразитного магнитного поля, магнитный курс, вычисленный по информации с одного магнитометра, изменяется во времени, а это при калибровке магнитометра приводит к разным значениям поправки на одном и том же курсе в разных инерциальных измерительных блоках и затем к расхождению магнитных курсов в процессе полета, а также приводит к погрешности калибровки магнитометра инерциальных измерительных блоков из-за неточности установки ЛА на известный курс.
Заявленное изобретение направлено на повышение надежности и точности пилотирования ЛА за счет введения калибровки магнитометра.
Поставленная задача достигается тем, что в блок ориентации пилотажно-навигационного комплекса (ПНК) ЛА, содержащий магнитометр и подключенные к нему первый и второй инерциальные измерительные блоки, в состав каждого из которых входят вычислитель и постоянное запоминающее устройство (ПЗУ), согласно изобретению дополнительно введены первое и второе устройства интерфейса и коммутирующее устройство, подключенное к первому и второму инерциальным измерительным блокам, подключенным через первое и второе устройства интерфейса к шине внешнего интерфейса.
К существенным отличиям предложенного устройства относится введение в него первого и второго устройства интерфейса и коммутирующего устройства, подключенного к первому и второму инерциальным измерительным блокам, подключенным через первое и второе устройства интерфейса к шине внешнего интерфейса.
В способе калибровки магнитометра блока ориентации ПНК, заключающемся в сравнении сформированного гиромагнитного курса с истинным магнитным курсом, согласно изобретению сначала формируют на программном уровне в вычислителях каждого инерциального измерительного блока фильтр гиромагнитного курса по значениям своего гироскопического курса и магнитного курса с магнитометра, то есть устанавливают ЛА на курс равный 0°, после чего по команде с коммутирующего устройства производят ускоренное согласование гироскопических курсов, в каждом инерциальном блоке с истинным магнитным курсом, затем вычисленный фильтром гиромагнитный курс сравнивают с истинным магнитным курсом, полученным по шине внешнего интерфейса, через первое и второе устройства интерфейса, а их разность вводят в ПЗУ каждого инерциального измерительного блока, потом разворачивают ЛА на углы, кратные 45°, также разности в значениях гиромагнитного курса по отношению к истинным вводят в ПЗУ и используют впоследствии при полете ЛА.
К существенным признакам предложенного способа калибровки магнитометра блока ориентации ПНК относятся формирование на программном уровне в вычислителях каждого инерциального измерительного блока фильтра гиромагнитного курса по значениям своего гироскопического курса и магнитного курса магнитометра, то есть устанавливают ЛА на курс равный 0°, после чего по команде с коммутирующего устройства производят ускоренное согласование гироскопических курсов в каждом инерциальном измерительном блоке с истинным магнитным курсом, затем вычисленный фильтром гиромагнитный курс сравнивают с истинным магнитным курсом, полученным по шине внешнего интерфейса, через первое и второе устройства интерфейса, а их разность вводят в ПЗУ каждого инерциального измерительного блока, потом разворачивая ЛА на углы, кратные 45°, также разности в значениях гиромагнитного курса по отношению к истинным вводят в ПЗУ и используют впоследствии при полете ЛА.
На чертеже представлена схема устройства, которое содержит магнитометр 1, первый инерциальный измерительный блок 2, второй инерциальный измерительный блок 3, первое устройство 4 интерфейса, второе устройство 5 интерфейса, коммутирующее устройство 6, шину 7 внешнего интерфейса.
В предложенном устройстве к магнитометру 1 подключены первый 2 и второй 3 инерциальные измерительные блоки, к которым подключено коммутирующее устройство 6 и первое 4, и второе 5 устройства интерфейса, подключенные к шине 7 внешнего интерфейса.
Устройство работает следующим образом.
Первый 2 и второй 3 инерциальные измерительные блоки формируют гироскопические курсы по показаниям собственных датчиков первичной информации. Затем на программном уровне в каждом инерциальном измерительном блоке формируется фильтр гиромагнитного курса по значениям своего гироскопического курса и магнитного курса магнитометра 1. Для этого устанавливают ЛА на курс равный 0° после чего по команде с коммутирующего устройства 6 производят ускоренное согласование гироскопических курсов в каждом инерциальном измерительном блоке 2 и 3 с истинным магнитным курсом. Затем вычисленный фильтром гиромагнитный курс сравнивается с истинным магнитным курсом, полученным по шине 7 внешнего интерфейса через первое 4 и второе 5 устройства интерфейса, а их разность вводится в ПЗУ каждого инерциального измерительного блока 2 и 3. Далее, разворачивая ЛА на углы, кратные 45°, также разности в значениях гиромагнитного курса по отношению к истинным вводят в ПЗУ и используют впоследствии при полете ЛА. Предложенное устройство используется в датчике курса и вертикали.
Источники информации
1. Патент США №4347730, Кл 73/1E, 1982 г.
2. Д.А. Браславский, С.С. Логунов, Д.С. Пельпор. Авиационные приборы изд. «Машиностроение», Москва, 1964 г. стр.391.
3. Патент РФ №2467288, МПК G01C 21/12 опубликованный 20.11.2012 г. (ближайший аналог).
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕЗЕРВНЫХ ПРИБОРОВ ДЛЯ САМОЛЕТОВ И ВЕРТОЛЕТОВ | 2006 |
|
RU2337315C2 |
| СПОСОБ УСТАНОВКИ НА ПРИБОРНУЮ ПАНЕЛЬ ЛЕТАТЕЛЬНОГО АППАРАТА РЕЗЕРВНОГО БЛОКА ОРИЕНТАЦИИ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА | 2013 |
|
RU2541727C2 |
| РЕЗЕРВНАЯ СИСТЕМА ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И СПОСОБ ВЫСТАВКИ ЕЕ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ | 2014 |
|
RU2551710C1 |
| Способ установки на приборную панель летательного аппарата резервного блока ориентации пилотажно-навигационного комплекса | 2023 |
|
RU2822083C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕЗЕРВНЫХ ПРИБОРОВ И СПОСОБ КАЛИБРОВКИ ДАТЧИКА МАГНИТНОГО ПОЛЯ ИНТЕГРИРОВАННОЙ СИСТЕМЫ РЕЗЕРВНЫХ ПРИБОРОВ | 2015 |
|
RU2593424C1 |
| Способ калибровки датчика магнитного поля интегрированной системы резервных приборов | 2016 |
|
RU2660043C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕЗЕРВНЫХ ПРИБОРОВ | 2009 |
|
RU2386927C1 |
| Способы формирования данных об ориентации объекта и навигационный комплекс летательного аппарата для их реализации | 2020 |
|
RU2745083C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И КУРСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2427799C1 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И КУРСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2505786C2 |
Изобретение относится к авиационной технике, в частности к блокам ориентации самолетов и вертолетов. Технический результат - повышение точности пилотирования ЛА за счет введения калибровки магнитометра. Существенным отличием устройства является введение первого и второго устройства интерфейса и коммутирующего устройства. Существенным отличием способа является сравнение вычисленного фильтром гиромагнитного курса с истинным магнитным курсом, полученным через первое и второе устройства интерфейса. Разность вычисленного гиромагнитного курса и истинного магнитного курса вводят в ПЗУ каждого измерительного блока, после чего, разворачивая ЛА на углы, кратные 45°, разности гиромагнитного курса по отношению к истинным вводят в ПЗУ и используют при полете ЛА. Предложенное устройство используется в датчике курса и вертикали. 2 н.п. ф-лы, 1 ил.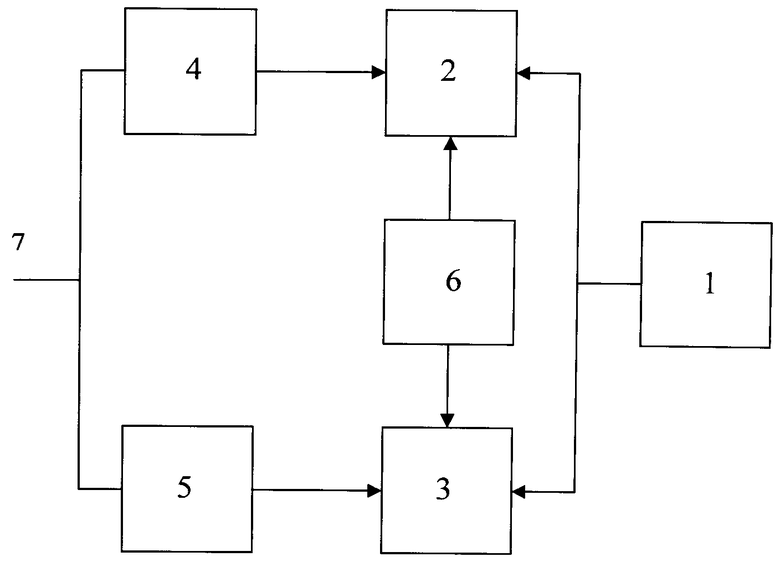
1. Блок ориентации пилотажно-навигационного комплекса (ПНК) летательного аппарата (ЛА), содержащий магнитометр и подключенные к нему первый и второй инерциальные измерительные блоки, в состав каждого из которых входят вычислитель и постоянное запоминающее устройство (ПЗУ), отличающийся тем, что в него дополнительно введены первое и второе устройства интерфейса и коммутирующее устройство, подключенное к первому и второму инерциальным измерительным блокам, подключенным через первое и второе устройства интерфейса к шине внешнего интерфейса.
2. Способ калибровки магнитометра блока ориентации ПНК, заключающийся в сравнении сформированного гиромагнитного курса с истинным магнитным курсом, отличающийся тем, что сначала формируют на программном уровне в вычислителях каждого инерциального измерительного блока фильтр гиромагнитного курса по значениям своего гироскопического курса и магнитного курса с магнитометра, то есть устанавливают ЛА на курс равный 0°, после чего по команде с коммутирующего устройства производят ускоренное согласование гироскопических курсов в каждом инерциальном измерительном блоке с истинным магнитным курсом, затем вычисленный фильтром гиромагнитный курс сравнивают с истинным магнитным курсом, полученным по шине внешнего интерфейса через первое и второе устройства интерфейса, а их разности вводят в ПЗУ каждого инерциального измерительного блока, потом, разворачивая ЛА на углы, кратные 45°, разности в значениях гиромагнитного курса по отношению к истинным вводят в ПЗУ и используют впоследствии при полете ЛА.
| БЛОК ОРИЕНТАЦИИ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА | 2011 |
|
RU2467288C1 |
| УСТРОЙСТВО ДЛЯ ВКЛЮЧЕНИЯ БЛОКА ОРИЕНТАЦИИ В ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 2008 |
|
RU2377501C1 |
| УСТРОЙСТВО ДЛЯ ВКЛЮЧЕНИЯ БЛОКА ОРИЕНТАЦИИ ИНТЕГРИРОВАННОЙ СИСТЕМЫ РЕЗЕРВНЫХ ПРИБОРОВ В ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 2008 |
|
RU2377502C1 |
| САМОЙЛОВ В.М., СВЯЖИН Д.В | |||
| Компенсация магнитной девиации интегрированной системы резервных приборов, Юбилейная XV Санкт-Петербургская международная конференция по интегрированным навигационным системам | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| БАБИЧ О.А. | |||

