Область техники, к которой относится изобретение
Настоящее изобретение относится в целом к сельскохозяйственным транспортным средствам и, более конкретно, к сцепным системам, которые соединяют сельскохозяйственные тракторы и буксируемые инструменты, которые буксируются за тракторами.
Сельскохозяйственные тракторы используются для буксирования буксируемых инструментов, таких как инструменты для обработки почвы или сбора урожая, через сельскохозяйственные поля и бестарные носители, такие как повозки, через поля и по дороге. Сцепка буксируемого инструмента с трактором может быть трудоемкой, изнурительной и требующей затрат времени. Современные процедуры сцепки требуют, чтобы оператор выходил из кабины трактора и входил в нее, иногда несколько раз, для визуального осмотра и манипулирования соединением компонентов буксируемого инструмента и трактора. Во время сцепки высота языка буксируемого инструмента должна быть отрегулирована для совпадения с высотой тягового стержня трактора, причем трактор должен маневрировать так, чтобы совмещать язык буксируемого инструмента и тяговый стержень трактора, сцепной палец должен быть вставлен через язык буксируемого инструмента и тяговый стержень трактора, электрические и гидравлические системы буксируемого инструмента и трактора должны быть соединены друг с другом. Обычный способ уменьшения количества раз, когда оператор должен выйти из кабины трактора и войти в нее для осуществления этих процедур, заключается в наличии второго человека, стоящего за трактором для помощи или выполнения многих из этих процедур.
Краткое изложение сущности изобретения
Настоящее изобретение направлено на сцепную систему для автоматической сцепки трактора с буксируемым инструментом. Сцепная система может позволить оператору, который находится в кабине трактора, удаленно соединять электрические и гидравлические схемы трактора и инструмента друг с другом и удаленно закреплять сцепной палец, который соединяет язык инструмента с тяговым стержнем трактора. Система может обеспечить управляющие устройства для удаленного перемещения компонентов системы изнутри кабины так, чтобы совмещение и соединение компонентов системы могло быть выполнено без полной зависимости от маневрирования трактора и требования выполнения соединений вручную оператором.
Сцепная система может включать в себя узлы группы соединителей инструмента и трактора, которые соответственно предусмотрены на инструменте и тракторе. Узел группы соединителей трактора может быть подвижным в множестве направлений для того, чтобы позволить узлу группы соединителей трактора быть удаленно управляемым из кабины трактора для совмещения и перемещения в зацепление с узлом группы соединителей инструмента.
Согласно одной особенности изобретения, разработана сцепная система для автоматической сцепки трактора с буксируемым инструментом. Система может включать в себя узел группы соединителей инструмента, который имеет электрический соединитель и/или гидравлический соединитель, которые соответственно присоединены к электрической системе и гидравлической системе инструмента, который может быть прицеплен к трактору и буксироваться за ним. Узел группы соединителей трактора включает в себя электрический соединитель и/или гидравлический соединитель, которые соответственно присоединены к электрической системе и гидравлической системе трактора. Узел привода, который может быть управляемым удаленно, может быть расположен между трактором и узлом группы соединителей трактора так, чтобы перемещать узел группы соединителей трактора вдоль первого пути перемещения и второго пути перемещения, который отличается от первого пути перемещения. Первый и второй пути перемещения узла группы соединителей трактора могут быть в целом ортогональны относительно друг друга. Первый путь перемещения может простираться в целом в вертикальном направлении, и второй путь перемещения простирается в целом в горизонтальном направлении. Это может позволить оператору удаленно перемещать компоненты систем буксируемого инструмента и/или трактора в совмещение и соединение друг с другом, без покидания кабины трактора.
Согласно другой особенности изобретения, узел привода может включать в себя первый привод, присоединенный к узлу группы соединителей трактора и имеющий опущенное положение, в котором узел группы соединителей трактора расположен относительно ближе к поверхности земли, поддерживающей трактор, и поднятое положение, в котором узел группы соединителей трактора расположен относительно дальше от поверхности земли, поддерживающей трактор. Узел привода может включать в себя второй привод, присоединенный к узлу группы соединителей трактора и имеющий внутреннее положение, в котором узел группы соединителей трактора расположен относительно ближе к трактору, и наружное положение, в котором узел группы соединителей трактора расположен относительно дальше от трактора. Это может обеспечить удаленно управляемое перемещение узла группы соединителей трактора.
Согласно еще одной особенности изобретения, опора инструмента может быть расположена между языком инструмента и узлом группы соединителей инструмента. Опора инструмента может включать в себя раму группы инструмента, которая удерживает узел группы соединителей инструмента, и телескопическую опору, которая взаимосвязывает раму группы и инструмент и позволяет раме группы инструмента перемещаться в целом в вертикальном направлении. Опора инструмента может включать в себя стойку, имеющую первый конец, который присоединен к языку буксируемого инструмента, и втулку, которая может перемещаться в продольном направлении вдоль стойки. Рама группы инструмента может быть присоединена к втулке для перемещения вдоль стойки, и пружина может поджимать раму группы инструмента к промежуточному положению между верхним и нижним концами стойки. Ползуны могут быть расположены между втулкой и рамой группы инструмента для того, чтобы позволять раме группы инструмента перемещаться ближе или дальше от стойки телескопической опоры. Шарнир, который может включать в себя упругий материал, который самоцентрирует или самоподдерживает шарнир в положении по умолчанию, может быть расположен между втулкой и рамой группы инструмента для того, чтобы позволять раме группы поворачиваться относительно стойки телескопической опоры. Это может позволить узлу группы соединителей инструмента быть удерживаемым в положении по умолчанию, то есть быть подвижным в другие положения и ориентации во время процедур сцепки, в это же время будучи зацепленным с узлом группы соединителей трактора.
Согласно другой особенности изобретения, замок может быть расположен между узлами группы соединителей инструмента и трактора. Замок может иметь незапертое положение, в котором узлы группы соединителей инструмента и трактора являются подвижными относительно друг друга, и запертое положение, в котором узлы группы соединителей инструмента захвачены друг с другом и трактора удерживаются в зацеплении друг с другом. Замок может включать в себя зажим, который поворачивается вокруг оси для притягивания узлов группы соединителей инструмента и трактора друг к другу, и электрический двигатель, который приводит зажим в поворот вокруг оси. Пара пальцев и пара приемников, которые могут иметь форму конуса, могут обеспечивать механическое совмещение узлов группы соединителей инструмента и трактора до и во время зацепления узлов группы соединителей инструмента и трактора. Это может обеспечить автоматическое совмещение и соединение узлов группы соединителей инструмента и трактора, пока перемещение узла группы соединителей трактора удаленно управляется оператором из кабины трактора. Это может обеспечить соединение электрических и гидравлических систем буксируемого инструмента и трактора так, что высота языка буксируемого инструмента может быть отрегулирована удаленно посредством удаленного управления электрическим или гидравлическим домкратом языка буксируемого инструмента для совпадения с высотой тягового стержня трактора. Затем трактор может быть перемещен задним ходом так, чтобы язык буксируемого инструмента и тяговый стержень трактора совместились друг с другом, и оператор внутри кабины трактора может удаленно управлять сцепным пальцем, который перемещается приводом, для закрепления пальца через язык буксируемого инструмента и тяговый стержень трактора, соединяя их друг с другом.
Другие особенности, цели, признаки и преимущества изобретения будут понятны специалистам в данной области техники из последующего подробного описания и прилагаемых чертежей. Тем не менее, следует понимать, что подробное описание и конкретные примеры, тогда как они обозначают предпочтительные варианты осуществления изобретения, даны иллюстративно, а не для ограничения. Множество изменений и модификаций может быть выполнено в объеме настоящего изобретения без отхода от его сущности, и изобретение включает в себя все такие модификации.
Краткое описание чертежей
Фиг.1 представляет собой частично схематичный упрощенный вид сбоку в вертикальной проекции сцепной системы согласно изобретению;
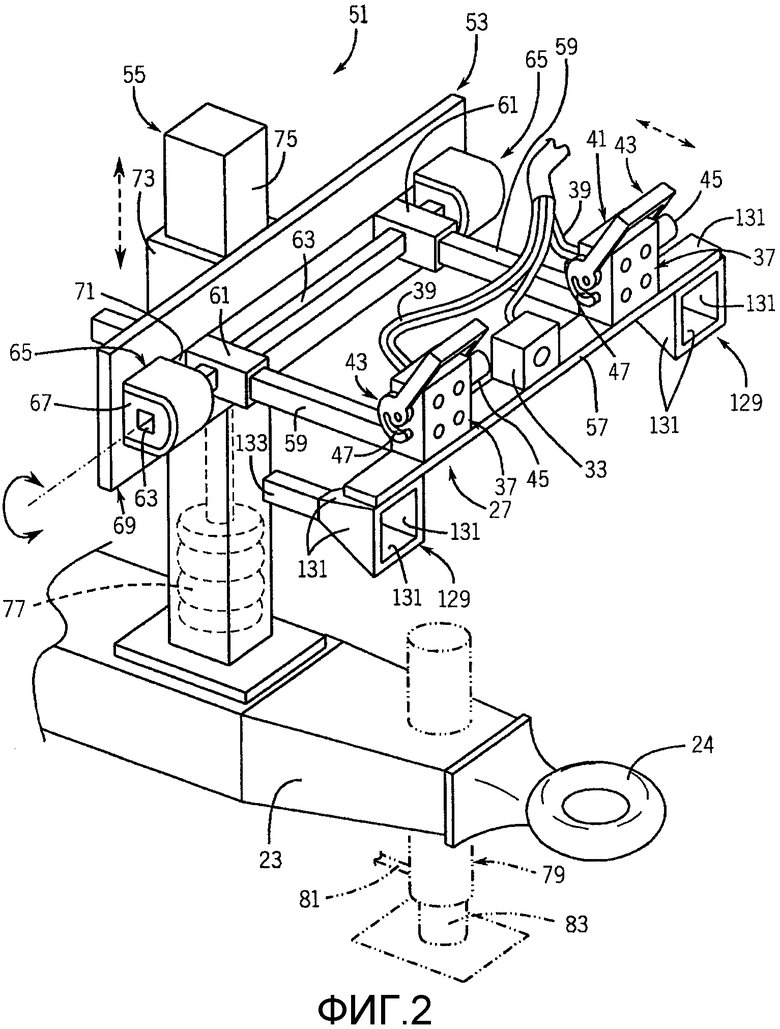
фиг.2 представляет собой вид в изометрии частей сцепной системы фиг.1; и
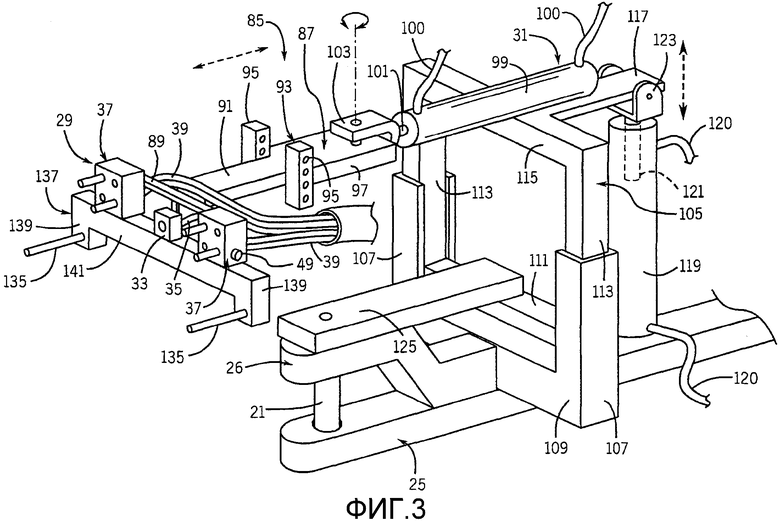
фиг.3 представляет собой вид в изометрии частей сцепной системы фиг.1.
Подробное описание вариантов осуществления настоящего изобретения
Обратимся к фиг.1, на которой показана сцепная система 5, которая используется с буксируемым инструментом 7 и трактором 9, который будет буксировать буксируемый инструмент 7. Сцепная система 5 позволяет оператору автоматически совмещать и удаленно присоединять электрическую систему 11 инструмента и гидравлическую систему 13 инструмента к электрической системе 15 трактора и гидравлической системе 17 трактора соответственно и удаленно закреплять сцепной палец 21 через язык 23 буксируемого инструмента 7 и тяговый стержень 25 трактора 9, в то время как оператор остается в кабине трактора 9. Это может быть выполнено из кабины трактора 9 посредством системы 6 управления, как подробно объяснено в другом месте в этом документе.
Как опять же видно из фиг.1, сцепная система 5 включает в себя узел 27 группы соединителей инструмента, который обеспечивает средство (средства) сопряжения гидравлической и/или электрической систем 11, 13 инструмента и который поддерживается на языке 23 буксируемого инструмента 7. Узел 29 группы соединителей трактора, который обеспечивает средство (средства) сопряжения гидравлической и/или электрической систем 15, 17 трактора, поддерживается тяговым стержнем 25 трактора 9. Узел 31 привода расположен между узлом 29 группы соединителей трактора и тяговым стержнем 25 трактора 9 и выполнен с возможностью быть удаленно управляемым для перемещения узла 29 группы соединителей трактора в целом вертикально или вверх и вниз и в целом горизонтально или вперед и назад для совмещения и зацепления с узлом 27 группы соединителей инструмента. Например, в целом вертикальные и горизонтальные перемещения могут лежать в пределах примерно 30 градусов от истинной вертикали или горизонтали.
Теперь обратимся к фиг.2 и 3, на которых видно, что каждый из узлов 27, 29 группы соединителей инструмента и трактора включает в себя электрический соединитель 35, который может быть 7-штырьковым электрическим соединителем, известным в индустрии сельскохозяйственных тракторов, таким как используемые на комбайнах CASE IH- Axial-Flow 2557 и 2558 и соответствующих жатках, предлагаемых CNH America LLC. Провода 35 простираются от электрического соединителя 33 и находятся в рабочем соединении с электрической системой буксируемого инструмента 7. Как показано, каждый из узлов 27, 29 группы соединителей инструмента и трактора также включает в себя пару гидравлических соединителей 37, которые поперечно разнесены друг от друга и предусмотрены на противоположных сторонах электрического соединителя 33. Каждый гидравлический соединитель 37 может быть быстродействующим гидравлическим соединителем, известным в индустрии сельскохозяйственных тракторов, таким как используемые на комбайнах CASE IH- Axial-Flow 2557 и 2558 и соответствующих жатках, предлагаемых CNH America LLC. Гидравлические линии 39 простираются от гидравлических соединителей 37 и находятся в рабочем соединении с гидравлической системой буксируемого инструмента 7.
Как опять видно из фиг.1, запирающая система 41 расположена на узлах 27, 29 группы соединителей инструмента и трактора для закрепления и удерживания узлов 27, 29 группы соединителей инструмента и трактора в рабочем соединении друг с другом. Как показано на фиг.2, запирающая система 41 включает в себя зажим 43, который установлен на каждый из гидравлических соединителей 37 узлов 27 группы соединителей инструмента. Каждый зажим 43 приводится двигателем 45 для поворота вокруг в целом горизонтальной оси поворота, которая простирается поперечно через гидравлический соединитель 37. Каждый зажим имеет криволинейную щель 47, которая принимает стойку 49 (фиг.1 и 3), которая простирается из боковой стенки (стенок) гидравлического соединителя 37 узла 29 группы соединителей трактора, в это же время будучи приводимым в поворот двигателем 45 (фиг.2).
Как схематично показано на фиг.1, запирающая система 41 может быть управляемой удаленно через систему 6 управления. Используя систему 6 управления, оператор в кабине трактора 9 может подать питание к двигателю 45 (фиг.2) для поворота зажима 43 так, чтобы привести в действие запирающую систему между незапертым положением. В незапертом положении запирающей системы 41 узлы 27, 29 группы соединителей инструмента и трактора могут перемещаться относительно друг друга. В запертом положении запирающей системы 41 стойка 49 (фиг.3) полностью посажена в конце криволинейной щели 47. Это зацепление криволинейной щели 47 и стойки 49, когда запирающая система 41 находится в запертом положении, предотвращает разделение узлов 27, 29 группы соединителей инструмента и трактора до тех пор, пока зажим 43 не будет перемещен в положение, которое соответствует незапертому положению запирающей системы 41.
Как видно из фиг.2, опора 51 инструмента расположена между узлом 27 группы соединителей инструмента и буксируемым инструментом 7. Опора 51 инструмента включает в себя раму 53 группы, которая удерживает узел 27 группы соединителей инструмента, и телескопическую опору 55, которая поддерживает раму 53 группы. Рама 53 группы включает в себя перекладину 57, к которой прикреплены электрические и гидравлические соединители 33, 37. Пара скользящих стержней 59, которые параллельны друг другу, простирается из противоположных боковых частей перекладины, назад к телескопической опоре 55. Пара скользящих втулок 59 принимает скользящие стержни 59 через продольно простирающиеся отверстия, так что скользящие стержни 59 могут перемещаться через скользящие втулки 61 для того, чтобы позволить узлу 27 группы соединителей инструмента придвигаться к и отодвигаться от телескопической опоры 55, в направлениях вперед и назад относительно продольной оси буксируемого инструмента 7.
Как видно из фиг.2, скользящие втулки 61 присоединены друг к другу через поворотный вал 63, который простирается поперечно между скользящими втулками 61 и простирается поперечно за каждую из скользящих втулок 61. Пара шарниров 65 зацеплена с противоположными концами поворотного вала 63 и позволяет поворотному валу 63 поворачиваться в них. Каждый шарнир 65, показанный на фиг.2, включает в себя блок 67, который выполнен из упругого, такого как эластомерный, материала и имеет прямоугольное отверстие, которое соответствует прямоугольному профилю поперечного сечения поворотного вала 63 и которое захватывает поворотный вал 63. Это позволяет шарниру 65 поддерживать узел 27 группы соединителей инструмента в расположенном в целом горизонтально положении покоя, в это же время позволяя узлу 27 группы соединителей инструмента отклоняться вверх или вниз по пути дугообразного перемещения вокруг шарнира посредством деформации упругого материала блока 67, когда поворотный вал 63 вращается в нем.
Как видно из фиг.2, шарниры 65 прикреплены к пластине 69, которая параллельна перекладине 57 и имеет щель 71, через которую простираются скользящие стержни 59, которая обеспечивает достаточный зазор для поворота скользящих стержней 59 вверх и вниз. Пластина 69 прикреплена к втулке 73, которая окружает стойку 75 и может перемещаться вдоль нее. Нижний конец стойки 75 присоединен к языку 23 буксируемого инструмента 7 и простирается вверх от него. Пружина 77 расположена внутри стойки 75 и поджимает втулку 73 в положение состояния покоя в средней части стойки 75. Это может быть выполнено посредством предусмотрения одной или более щелей (не показанных) в стенке стойки 75, через которые палец (не показанный), который прикреплен к втулке 73, простирается вовнутрь стойки 75 для зацепления с пружиной 77 и поджимного поддерживания ей. Это позволяет втулке 73 и, таким образом, узлу 27 группы соединителей инструмента перемещаться вниз или вверх вдоль стойки 75, в это же время будучи поджимаемыми к положению состояния покоя в средней части стойки 75.
Как видно из фиг.1 и 2, буксируемый инструмент 7 включает в себя домкрат 79 языка, который прикреплен к языку 23 буксируемого инструмента 7. Электрическая или гидравлическая линия 81 обеспечивает рабочее соединение домкрата 79 языка с системой 6 управления (фиг.1) для удаленного управления домкратом 79 языка для управления высотой языка 23 посредством перемещения стержня 83 в домкрат 79 языка или из него, например посредством электрического или гидравлического приведения стержня 83.
Как видно из фиг.3, опора 85 трактора расположена между узлом 29 группы соединителей трактора и трактором 9. Опора 85 трактора включает в себя раму 87 группы трактора, которая удерживает узел 29 группы соединителей трактора. Рама 87 группы трактора имеет перекладину 89, к которой прикреплены электрические и гидравлические соединители 33, 37, и передний стержень 91, который простирается назад от перекладины 89. Передний стержень 91 прикреплен к реечному узлу 93, который имеет пару разнесенных стоек 95. Стойки 95 рейки имеют множественные вертикально разнесенные отверстия, которые позволяют устанавливать передний стержень 97 на разных высотах относительно реечного узла 93. Первый конец заднего стержня 97 присоединен к реечному узлу 93. Задний стержень 97 простирается назад от реечного узла 93 ко второму концу заднего стержня 97, который шарнирно прикреплен к узлу 31 привода. Шарнирное прикрепление заднего стержня 97 к узлу 31 привода позволяет узлу 29 группы соединителей трактора поворачиваться вбок вокруг в целом вертикальной оси поворота. У соединения между задним стержнем 97 и узлом 31 привода может быть предусмотрена эластомерная втулка, которая позволяет узлу 29 группы соединителей трактора поворачиваться вверх и вниз в дополнение к повороту вбок.
Как видно из фиг.1 и 3, узел 31 привода позволяет узлу 29 группы соединителей трактора перемещаться вдоль первого пути перемещения и второго пути перемещения, который отличается от первого пути перемещения и показан как в целом ортогональный ему штриховыми стрелками. Узел 31 привода включает в себя первый привод 99, который показан как представляющий собой гидравлический поршень с гидравлическими линиями 100, которые находятся в рабочем соединении с системой 6 управления (схематично показанной на фиг.1), так что первый привод 99 может быть управляемым удаленно от оператора внутри кабины трактора 9. Первый привод 99 показан как расположенный в целом в горизонтальном направлении, так что подвижный стержень 101 первого привода 99 может перемещаться в направлениях вперед и назад вдоль продольной оси трактора 9. Скоба 103 прикреплена к концу стержня 101 так, что скоба 103 и стержень 101 перемещаются в унисон друг с другом. Скоба 103 присоединена к заднему концу заднего стержня 97 для обеспечения шарнирного соединения между рамой 87 группы трактора и узлом 31 привода.
Как видно из фиг.1 и 3, первый привод 99 присоединен к телескопической раме 105, которая может перемещаться вверх и вниз относительно тягового стержня 25 трактора 9, будучи направляемой парой в целом вертикально простирающихся разнесенных направляющих 107, которые соединены друг с другом посредством основания 109. Как показано на фиг.3, направляющие 107 этого варианта осуществления имеют С-образные профили, которые зацепляются с противоположными сторонами телескопической рамы 105. Телескопическая рама 105 включает в себя нижнюю перекладину 111 и пару стоек 113, которые простираются параллельно друг другу и вверх от противоположных сторон нижней перекладины 111 и посажены с возможностью скольжения в полости направляющих 107. Верхняя перекладина 115, к которой прикреплен первый привод 99, простирается параллельно нижней перекладине 111 и соединяет верхние концы стоек 113 друг с другом. Кронштейн 117 простирается назад от верхней перекладины 115 к трактору 9 и присоединен ко второму приводу 119. Второй привод 119 показан как представляющий собой гидравлический цилиндр с гидравлическими линиями 120, находящимися в рабочем соединении с системой 6 управления (схематично показано на фиг.1) так, что второй привод 119 может быть управляемым удаленно от оператора в кабине трактора 9. Второй привод 119 показан как расположенный в целом в вертикальном направлении, так что подвижный стержень 121 второго привода 119 может перемещаться в направлениях вверх и вниз, в целом ортогонально относительно перемещения первого привода 99. Скоба 123 присоединена к концу стержня 121 так, что скоба 123 и стержень 121 перемещаются в унисон друг с другом. Скоба 123 присоединена к заднему концу кронштейна 117 так, что перемещение стержня 121 и скобы 123 преобразуется в перемещение кронштейна 117, телескопической рамы 105 и первого привода 99 и узла 29 группы соединителей трактора, которые поддерживаются телескопической рамой 105.
Как видно из фиг.1 и 3, в этом варианте осуществления, второй привод 119 обеспечивает перемещение сцепного пальца 21 в дополнение к перемещению узла 29 группы соединителей трактора. Сцепной палец 21 присоединен к концу держателя 125 пальца, и противоположный конец держателя 125 пальца присоединен к нижней перекладине 111 телескопической рамы 105. Таким образом, когда телескопическая рама 105 перемещается вторым приводом 119, держатель 125 пальца и палец 21 перемещаются в унисон с телескопической рамой. Это позволяет пальцу 21 перемещаться в полностью втянутое положение, как показано на фиг.1, в полностью вставленное положение, как показано на фиг.3, в котором палец простирается через совмещенные отверстия в скобе 26 и тяговом стержне 25. Следует понимать, что узел 31 привода может включать в себя другой привод, который управляется через систему 6 управления и который перемещает стержень 21 без одновременного перемещения узла 29 группы соединителей трактора.
Как видно из фиг.1, система 127 совмещения расположена относительно узлов 27, 29 группы соединителей инструмента и трактора для способствования их совмещению и зацеплению во время процедуры сцепки, которая учитывает запирание узлов 27, 29 группы соединителей инструмента и трактора друг с другом посредством запирающей системы 41. Как показано на фиг.2, система 127 совмещения включает в себя пару приемников 129, которые разнесены друг от друга и предусмотрены поперечно снаружи за электрическими и гидравлическими соединителями 33, 37 узла 27 группы соединителей инструмента. Каждый приемник 129 включает в себя взаимосвязанные боковые стенки 131, которые совместно сужаются и сходятся друг к другу в форме, подобной воронке. Верхние боковые стенки 131 приемников присоединены к перекладине 57 так, что приемники подвешены, свисая под узлом 27 группы соединителей инструмента. Трубки 133 простираются от суженных концов приемников 129, причем каждая трубка 133 совмещена с центральной продольно простирающейся осью соответствующего приемника 129.
Как показано на фиг.3, система 127 совмещения включает в себя пару пальцев 135, которые разнесены друг от друга и предусмотрены поперечно снаружи за электрическими и гидравлическими соединителями 33, 37 узла 29 группы соединителей трактора. Как видно из фиг.1 и 3, каждый палец 135 имеет наружный диаметр, который соответствует внутреннему диаметру трубки (трубок) 133 приемника 129, так что каждый палец 135 может скользить через соответствующую трубку 133 так, чтобы совмещать узлы 27, 29 группы соединителей инструмента и трактора друг с другом. Обратимся опять к фиг.3, пальцы 135 присоединены к раме 137 пальцев, которая включает в себя пару стоек 139 у противоположных сторон рамы 137 пальцев и перекладину 141, которая простирается между верхними концами стоек 139 и соединяет их. На фиг.1 показана рама 137 пальцев, присоединенная к нижней части рейки 93, тогда как на фиг.3 показана рама 137 пальцев, присоединенная к нижней части узла 29 группы соединителей трактора. Независимо от того, к какому компоненту присоединены пальцы 135 и рама 137 пальцев, пальцы 135 и приемники 129 взаимодействуют в системе 127 совмещения для того, чтобы позволить узлам 27, 29 группы контактов инструмента и трактора автоматически совмещаться и зацепляться друг с другом, когда оператор удаленно управляет сцепной системой 5 изнутри кабины трактора 9 с системой 6 управления.
Как видно из фиг.1, система 6 управления показана как имеющая контроллер 143, который может включать в себя промышленный компьютер или, например, программируемый логический контроллер (programmable logic controller (PLC)), совместно с соответствующим программным обеспечением и подходящим аппаратным обеспечением для управления электронными или электромеханическими компонентами сцепной системы 5, и также может включать в себя клапанные узлы для управления гидравлическими компонентами сцепной системы 5. Консоль 145 пользователя находится в рабочем соединении с контроллером 141 и включает в себя интерфейс пользователя, такой как сигнальные лампы, дисплей, кнопки, переключатели и/или рычаги, которыми может управлять оператор для удаленного управления перемещениями узла 31 привода и сцепного пальца 21 и для наблюдения за состояниями компонентов системы изнутри кабины трактора 9.
Ввиду упомянутого выше, для того чтобы использовать сцепную систему 5 во время процедуры сцепки, оператор осуществляет движение задним ходом и маневрирование трактором 9 к инструменту 7. Компоненты сцепной системы 5 находятся на ясной линии взгляда оператора, тогда как находится внутри кабины трактора 9. Это позволяет оператору смотреть на приемники 129 и пальцы 135 как на направляющие маркеры и инструменты совмещения. Оператор перемещает трактор 9 так, чтобы пальцы 135 были поперечно совмещены с направленными вперед отверстиями приемников 129. Оператор останавливает трактор 9 и использует управляющее устройство, которое может быть кнопкой (кнопками), переключателем (переключателями) и/или рычагом (рычагами) консоли 145 пользователя для манипулирования узлом 31 привода. Оператор поднимает или опускает узел 29 группы соединителей трактора для вертикального совмещения узла 29 группы соединителей трактора с узлом 27 группы соединителей инструмента. Это осуществляется посредством манипулирования консолью 145 пользователя для перемещения стержня 121 второго привода 119 вверх или вниз так, чтобы перемещать пальцы 135 вверх или вниз до тех пор, пока пальцы 135 не будут находиться на такой же высоте (высотах), как приемники 131. После того как приемники 129 и пальцы 135 поперечно и вертикально совмещены друг с другом, оператор перемещает узел 29 группы соединителей трактора к узлу 27 группы соединителей инструмента. Это осуществляется посредством манипулирования управляющим устройством консоли 145 пользователя для перемещения стержня 101 первого привода 99 в направлении назад, что перемещает узел 29 группы соединителей трактора от трактора 9. Когда узел 29 группы соединителей трактора перемещается к узлу 27 группы соединителей инструмента, пальцы 135 входят в направленные вперед отверстия приемников 129, и пока пальцы 135 продвигаются через приемники, узлы 27, 29 группы соединителей инструмента и трактора автоматически совмещаются друг с другом из-за механического зацепления пальцев 135 и приемников 129.
Как видно из фиг.1 и 3, поперечное и боковое угловое или курсовое совмещение узлов 27, 29 группы соединителей инструмента и трактора автоматически достигается пальцами 135, скользящими через поперечно разнесенные пары боковых стенок 131, которые направляют пальцы, бок в бок, в трубки 133 у задних частей приемников 129. По мере того как пальцы 135 направляются в трубки 133, уменьшающиеся ширины отверстий, проходящих через приемники 129, заставляют узел 29 группы соединителей трактора поворачиваться вокруг шарнирного соединения между скобой 103 первого привода 99 и рамой 87 группы трактора так, чтобы автоматически поперечно и в угловом направлении совместить пальцы 135 с трубками 133 и, таким образом, также узлы 27, 29 группы соединителей инструмента и трактора друг с другом.
Как видно из фиг.1 и 2, вертикальное и угловое вверх/вниз или курсовое совмещение узлов 27, 29 группы соединителей инструмента и трактора автоматически достигается пальцами 135, скользящими через вертикально разнесенные пары боковых стенок 131, которые направляют пальцы, сверху и снизу, в трубки 133 у задних частей приемников 129. По мере того как пальцы 135 направляются в трубки 133, уменьшающиеся вышины отверстий, проходящих через приемники 129, заставляют узел 27 группы соединителей инструмента поворачиваться вокруг шарниров 63 и поджимать втулку 73 вверх или вниз стойки 75 телескопической опоры 55. Осуществление этого автоматически совмещает вертикально и в угловом направлении вверх/вниз или по курсу пальцы 135 с трубками 133 и, таким образом, также узлы 27, 29 группы соединителей инструмента и трактора друг с другом.
Как видно из фиг.1, когда пальцы 135 полностью вставлены в трубки 133, электрические и гидравлические соединители 33, 37 узлов 27, 29 группы соединителей инструмента и трактора, по существу, совмещены друг с другом в такой степени, которая соответствует размерам концентрических зазоров между пальцами 135 и трубками 133. По мере того как первый привод продолжает толкать узел 29 группы соединителей трактора к узлу 27 группы соединителей инструмента, узлы 27, 29 группы соединителей инструмента и трактора зацепляются друг с другом и электрическая и гидравлическая системы 11, 15 и 13, 17 инструмента 7 и трактора 9 присоединяются друг к другу. Оператор использует управляющее устройство консоли 145 пользователя для манипулирования запирающей системой 41 так, чтобы подавать питание к двигателю 45 (фиг.2), который вращает зажим 43 и запирает узлы 27, 29 группы соединителей инструмента и трактора друг с другом.
Как видно из фиг.1, все еще изнутри кабины трактора 9, оператор регулирует высоту языка 23 инструмента 7 для вертикального совмещения со скобой 26 тягового стержня 25 трактора. Это осуществляется посредством использования управляющего устройства консоли 141 пользователя, которая находится в рабочем соединении с домкратом 79 языка для регулировки высоты языка 23. Затем оператор использует управляющее устройство консоли 145 пользователя для помещения первого привода 99 в плавающий режим, который позволяет цилиндру сжиматься и стержню 101 свободно перемещаться. Оператор осуществляет движение задним ходом трактора 9 к инструменту до тех пор, пока кольцо 24 языка 23 инструмента не будет находиться внутри скобы 26 тягового стержня 25 трактора. Затем оператор останавливает трактор и использует управляющее устройство консоли 141 пользователя для опускания пальца 21 через скобу 26 тягового стержня и кольцо 24 языка 23, посредством опускания стержня 121 второго привода 119. Когда это выполнено, оператор может использовать управляющее устройство консоли 141 пользователя для полного втягивания стержня 83 домкрата 79 языка так, чтобы он больше не соприкасался с землей, и теперь полный вес инструмента поддерживается тяговым стержнем 25 трактора. Таким образом, инструмент 7 был прицеплен к трактору 9, и соответствующие электрические и гидравлические соединения были выполнены без покидания оператором кабины трактора и без необходимости выполнения нужных соединений вручную ассистентом на земле. Для отцепления инструмента 7 от трактора 9 упомянутые выше задачи, которые выполняются во время процедуры сцепки, выполняются в обратном порядке.
Невзирая ни на что, после того как узлы 27, 29 группы соединителей инструмента и трактора были присоединены друг к другу, сцепная система 5 обеспечивает значительное количество относительного перемещения между инструментом 7 и трактором 9 без ухудшения соединения (соединений) между узлами 27, 29 группы соединителей инструмента и трактора. Эти же множественные степени свободы перемещения в сцепной системе 5, которые способствуют автоматическому самосовмещению компонентов сцепной системы 5 во время процедуры сцепки, также позволяют соединенным узлам 27, 29 группы соединителей инструмента и трактора плавать в качестве узла между инструментом 7 и трактором 9 во время использования, тогда как инструмент 7 и трактор 9 перемещаются относительно друг друга.
Например, во время использования трактор 9 проходит по ненормальностям профиля почвы, таким как холмы, волнистости, поперечные канавы, поворотные полосы и/или другие, перед тем как буксируемый инструмент 7 достигнет этого же профиля (профилей) почвы, из-за чего инструмент 7 и трактор 9 могут испытывать значительные перемещения относительно друг друга. Скользящие стержни и втулки 59, 61 и/или плавающий режим первого привода 99 в версии гидравлического цилиндра могут обеспечивать относительные продольные перемещения инструмента 7 и трактора 9, например продольные перемещения опор 51, 85 инструмента и трактора относительно друг друга. Поскольку во время использования инструмент 7 и трактор 9 сцеплены друг с другом, любые такие относительные продольные перемещения между опорами 51, 85 инструмента и трактора обычно соответствуют изменениям в уклоне или угловом положении вверх и вниз между инструментом 7 и трактором 9, что также может быть обеспечено шарнирами 65, которые обеспечивают поворот вверх и вниз скользящих втулок 61 вокруг горизонтальной оси поворота. Это также может быть обеспечено по меньшей мере частично эластомерной втулкой, предусмотренной у крепления между задним стержнем 97 и скобой 103 первого привода 99 узла 31 привода, которая позволяет заднему стержню 97 поворачиваться вверх и вниз, по меньшей мере в некоторой степени, в дополнение к боковому поворотному перемещению в скобе 103. Боковое поворотное перемещение заднего стержня 97 в скобе 103 первого привода 99 может обеспечивать изменения углового положения из стороны в сторону между инструментом 7 и трактором 9, такие как прилагаемые во время руления. Относительные перемещения качания вокруг продольной оси между инструментом 7 и трактором 9 могут быть обеспечены посредством возможности стержня 101 вращаться в первом приводе 99. Такие степени свободы перемещения не являются взаимоисключающими, посредством чего в комбинации они могут динамически обеспечивать очень сложные и составные относительные перемещения между инструментом 7 и трактором 9 при езде по неровной местности.
Может быть выполнено множество изменений и модификаций изобретения без отхода от его сущности. Объем этих изменений будет понятным из прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для испытаний промышленного трактора | 1990 |
|
SU1742665A1 |
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ДВУХ ВАЛОВ И СНАБЖЕННОЕ ИМ СЦЕПНОЕ УСТРОЙСТВО | 2020 |
|
RU2803902C2 |
| ПРИЦЕПНОЕ И СЦЕПНОЕ ОБОРУДОВАНИЕ ДЛЯ АВТОМАТИЧЕСКОГО ВЫПОЛНЕНИЯ ПРИСОЕДИНЕНИЙ СЦЕПНЫХ ВИЛОК И ГИДРАВЛИЧЕСКИХ БЫСТРОДЕЙСТВУЮЩИХ СЦЕПНЫХ УСТРОЙСТВ МЕЖДУ ПРИЦЕПОМ ЗАПРАВОЧНОЙ ЦИСТЕРНЫ И СЕЛЬСКОХОЗЯЙСТВЕННЫМ ОРУДИЕМ МАШИНЫ ДЛЯ ВНЕСЕНИЯ NH | 2009 |
|
RU2496290C2 |
| КУЛЬТИВАТОР (ВАРИАНТЫ) И ФРЕЗА ДЛЯ НЕГО | 2009 |
|
RU2423807C2 |
| ТЯГОВО-СЦЕПНОЕ УСТРОЙСТВО ГУСЕНИЧНОЙ ИЛИ КОЛЕСНОЙ МАШИНЫ | 2017 |
|
RU2657655C1 |
| СЦЕПНОЙ УЗЕЛ С НАПРАВЛЯЮЩИМ ЭЛЕМЕНТОМ | 2007 |
|
RU2441770C2 |
| ГУСЕНИЧНЫЙ ТРАКТОР С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ (ВАРИАНТЫ) | 2019 |
|
RU2720694C1 |
| СИСТЕМА И СПОСОБ УКЛАДКИ БРЕЗЕНТА НА ГРУЗ | 2013 |
|
RU2623369C1 |
| АВТОНОМНАЯ СЕЛЬСКОХОЗЯЙСТВЕННАЯ СИСТЕМА (ВАРИАНТЫ) | 2020 |
|
RU2816527C2 |
| СЕЯЛКА ДЛЯ РАЗБРАСЫВАНИЯ ВЕЩЕСТВ ДЛЯ РЕГУЛИРОВАНИЯ ХАРАКТЕРИСТИК ПОЧВЫ, УДОБРЕНИЙ И СЕМЯН | 2021 |
|
RU2804457C1 |
Группа изобретений относится к сцепным системам, которые соединяют сельскохозяйственные тракторы и буксируемые инструменты, которые буксируются за тракторами. Сцепная система для автоматической сцепки трактора с буксируемым инструментом содержит узлы группы соединителей инструмента и трактора, которые включают в себя электрические и гидравлические соединители, и узел привода. Узел привода включает в себя первый привод для перемещения узла группы соединителей трактора вертикально по первому пути перемещения и второй привод для перемещения узла группы соединителей трактора по второму пути перемещения, отличному от первого пути перемещения, для того чтобы соединить электрический и гидравлический соединители узла группы соединителей трактора соответственно с электрическим и гидравлическим соединителями узла группы соединителей инструмента. Согласно третьему варианту сцепная система также содержит рамы групп инструмента и трактора, телескопическую опору, первый и второй шарниры, систему совмещения, запирающую систему и сцепной палец. Достигается возможность автоматической сцепки трактора и инструмента. 3 н. и 17 з.п. ф-лы, 3 ил.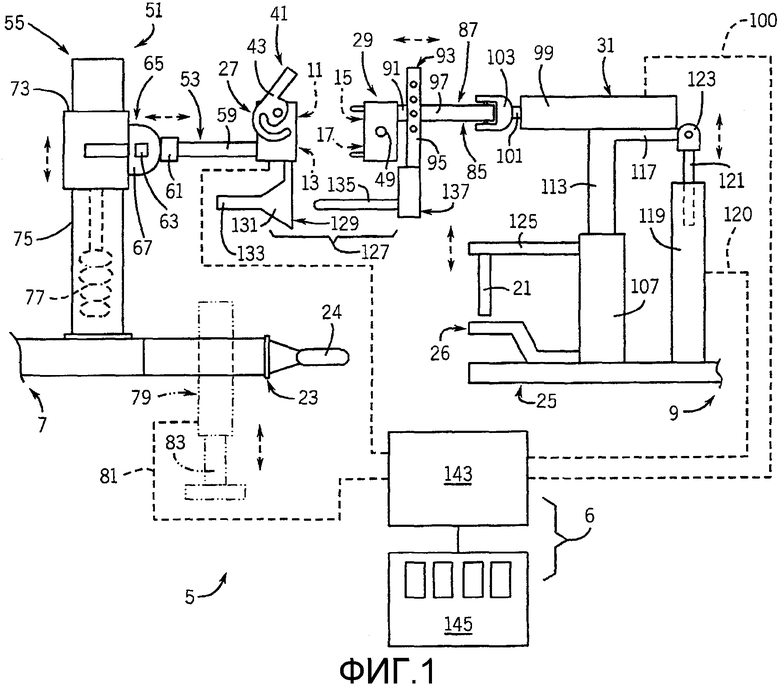
1. Сцепная система для автоматической сцепки трактора с буксируемым инструментом, содержащая:
узел группы соединителей инструмента, который включает в себя электрический соединитель и гидравлический соединитель, которые соответственно присоединены к электрической системе и гидравлической системе инструмента, который может быть прицеплен к трактору и буксироваться за ним;
узел группы соединителей трактора, который включает в себя электрический соединитель и гидравлический соединитель, которые соответственно присоединены к электрической системе и гидравлической системе трактора;
узел привода, выполненный с возможностью дистанционного управления, причем узел привода включает в себя первый привод, расположенный между трактором и узлом группы соединителей трактора для перемещения узла группы соединителей трактора вертикально по первому пути перемещения для совмещения узла группы соединителей трактора с узлом группы соединителей инструмента без перемещения трактора, и второй привод, расположенный между трактором и узлом группы соединителей трактора для перемещения узла группы соединителей трактора по второму пути перемещения, отличному от первого пути перемещения, для того чтобы соединить электрический и гидравлический соединители узла группы соединителей трактора соответственно с электрическим и гидравлическим соединителями узла группы соединителей инструмента.
2. Сцепная система по п.1, в которой первый и второй пути перемещения узла группы соединителей трактора в целом ортогональны друг другу.
3. Сцепная система по п.2, в которой второй путь перемещения проходит в целом в горизонтальном направлении.
4. Сцепная система по п.3, в которой второй привод имеет внутреннее положение, в котором узел группы соединителей трактора расположен относительно ближе к трактору, и наружное положение, в котором узел группы соединителей трактора расположен относительно дальше от трактора.
5. Сцепная система по п.4, в которой первый привод имеет опущенное положение, в котором узел группы соединителей трактора расположен относительно ближе к тяговому стержню трактора, и поднятое положение, в котором узел группы соединителей трактора расположен относительно дальше от тягового стержня трактора.
6. Сцепная система для автоматической сцепки трактора с буксируемым инструментом, содержащая:
узел группы соединителей инструмента, который включает в себя по меньшей мере один из электрического соединителя, который находится в рабочем соединении с электрической системой инструмента, прицепляемого к трактору и буксируемого за ним, и гидравлического соединителя, который находится в рабочем соединении с гидравлической системой инструмента, прицепляемого к тяговому стержню трактора и буксируемого за ним;
узел группы соединителей трактора, который включает в себя по меньшей мере один из электрического соединителя, который находится в рабочем соединении с электрической системой трактора, и гидравлический соединитель, который находится в рабочем соединении с гидравлической системой трактора, причем узел группы соединителей трактора выполнен с возможностью перемещения отдельно от трактора для выборочного зацепления с узлом группы соединителей инструмента для рабочего соединения электрических и/или гидравлических систем инструмента и трактора друг с другом; и
первый привод, расположенный между узлом группы соединителей трактора и трактором для перемещения узла группы соединителей трактора в целом в горизонтальном направлении так, чтобы придвигать узел группы соединителей трактора или отодвигать узел группы соединителей трактора от узла группы соединителей инструмента, причем первый привод имеет внутреннее положение, в котором узел группы соединителей трактора расположен относительно ближе к трактору, и наружное положение, в котором узел группы соединителей трактора расположен относительно дальше от трактора; и
второй привод, расположенный между узлом группы соединителей трактора и трактором для перемещения узла группы соединителей трактора в целом в вертикальном направлении так, чтобы вертикально совмещать узел группы соединителей трактора с узлом группы соединителей инструмента, причем второй привод имеет опущенное положение, в котором узел группы соединителей трактора расположен относительно ближе к тяговому стержню трактора, и поднятое положение, в котором узел группы соединителей трактора расположен относительно дальше от тягового стержня трактора.
7. Сцепная система по п.6, дополнительно содержащая опору инструмента, которая расположена между языком инструмента и узлом группы соединителей инструмента, причем опора инструмента включает в себя раму группы инструмента, которая удерживает узел группы соединителей инструмента, и телескопическую опору, которая взаимосвязывает раму группы инструмента и инструмент и позволяет раме группы инструмента перемещаться в целом в вертикальном направлении.
8. Сцепная система по п.7, в которой телескопическая опора опоры инструмента включает в себя стойку, имеющую первый конец, который присоединен к языку инструмента, втулку, которая может перемещаться в продольном направлении вдоль стойки, причем рама группы инструмента присоединена к втулке для перемещения в унисон с ней.
9. Сцепная система по п.8, в которой втулка телескопической опоры инструмента выполнена с возможностью перемещения между самым верхним положением и самым нижним положением, и причем телескопическая опора опоры инструмента включает в себя пружину, которая поддерживает втулку в положении покоя, которое находится между самым верхним и самым нижним положениями втулки.
10. Сцепная система по п.8, в которой опора инструмента включает в себя ползун, который расположен между втулкой и рамой группы инструмента для обеспечения прямолинейного перемещения рамы группы инструмента ближе или дальше от стойки телескопической опоры.
11. Сцепная система по п.8, в которой опора инструмента включает в себя шарнир, который расположен между втулкой и рамой группы инструмента для того, чтобы обеспечить поворот рамы группы относительно стойки телескопической опоры.
12. Сцепная система по п.11, в которой шарнир включает в себя упругий материал, который может быть изогнут для обеспечения поворотного перемещения рамы группы инструмента.
13. Сцепная система по п.6, дополнительно содержащая опору трактора, которая расположена между трактором и по меньшей мере одним из узла группы соединителей трактора и первого и второго приводов, причем опора трактора включает в себя раму группы трактора, которая удерживает узел группы соединителей трактора, и шарнир, расположенный между рамой группы трактора и трактором, который обеспечивает поворот рамы группы трактора относительно трактора.
14. Сцепная система по п.6, дополнительно содержащая узел сцепного пальца, который включает в себя палец и привод пальца, присоединенный к пальцу, и который так расположен относительно тягового стержня трактора, чтобы перемещать палец в и из отверстия в тяговом стержне трактора.
15. Сцепная система по п.14, в которой привод пальца является вторым приводом, который перемещает узел группы соединителей трактора ближе или дальше от тягового стержня трактора.
16. Сцепная система по п.6, в которой по меньшей мере один из первого и второго приводов является гидравлическим цилиндром.
17. Сцепная система по п.6, дополнительно содержащая запирающую систему, которая расположена между узлами группы соединителей инструмента и трактора, причем запирающая система имеет незапертое положение, в котором узлы группы соединителей инструмента и трактора являются подвижными относительно друг друга, и запертое положение, в котором узлы группы соединителей инструмента и трактора удерживаются в зацеплении друг с другом.
18. Сцепная система по п.17, в которой запирающая система включает в себя зажим, который поворачивается вокруг оси для притягивания узлов группы соединителей инструмента и трактора друг к другу, и электрический двигатель, который приводит зажим в поворот вокруг оси.
19. Сцепная система для автоматической сцепки трактора с буксируемым инструментом, содержащая:
узел группы соединителей инструмента, который включает в себя электрический соединитель, который находится в рабочем соединении с электрической системой инструмента, прицепляемого к тяговому стержню и буксируемого за трактором, и пару гидравлических соединителей, которые находятся в рабочем соединении с гидравлической системой инструмента;
раму группы инструмента, которая поддерживает узел группы соединителей инструмента;
телескопическую опору, расположенную между рамой группы инструмента и языком инструмента, причем телескопическая опора поддерживает раму группы соединителей инструмента для того, чтобы обеспечить перемещение узла группы соединителей инструмента в целом в вертикальном направлении относительно языка инструмента;
первый шарнир, расположенный между рамой группы инструмента и телескопической опорой для того, чтобы обеспечить поворот узла группы соединителей инструмента относительно языка инструмента;
узел группы соединителей трактора, который включает в себя электрический соединитель, который находится в рабочем соединении с электрической системой трактора, и пару гидравлических соединителей, которые находятся в рабочем соединении с гидравлической системой трактора, причем узлы группы соединителей инструмента и трактора выполнены с возможностью зацепления друг с другом для соединения электрических и гидравлических систем инструмента и трактора друг с другом;
раму группы трактора, которая поддерживает узел группы соединителей трактора;
узел привода, выполненный с возможностью дистанционного управления оператором трактора, причем узел привода расположен между трактором и рамой группы трактора так, чтобы перемещать узел группы соединителей трактора по первому пути перемещения и второму пути перемещения, который отличается от первого пути перемещения, для совмещения узла группы соединителей трактора с узлом группы соединителей инструмента без перемещения трактора, причем узел привода включает в себя первый гидравлический цилиндр, который имеет внутреннее положение, в котором узел группы соединителей трактора расположен относительно ближе к трактору, и наружное положение, в котором узел группы соединителей трактора расположен относительно дальше от трактора; и второй гидравлический цилиндр, который имеет опущенное положение, в котором узел группы соединителей трактора расположен относительно ближе к тяговому стержню трактора, и поднятое положение, в котором узел группы соединителей трактора расположен относительно дальше от тягового стержня трактора, причем перемещение первого и второго гидравлических цилиндров узла привода обеспечивает совмещение и зацепление узлов группы соединителей инструмента и трактора друг с другом без перемещения трактора;
второй шарнир, расположенный между рамой группы трактора и узлом привода для того, чтобы обеспечить поворот узла группы соединителей трактора инструмента относительно трактора, причем первый и второй шарниры образуют соответствующие оси, которые расположены в целом перпендикулярно друг другу;
систему совмещения, которая включает в себя пару пальцев и пару приемников, которые расположены относительно узлов группы соединителей инструмента и трактора так, чтобы зацепление пар пальцев и приемников во время перемещения узлов группы соединителей инструмента и трактора друг к другу вызывало совмещающее перемещение узлов группы соединителей инструмента и трактора для зацепления между ними;
запирающую систему, которая расположена между узлами группы соединителей инструмента и трактора, причем запирающая система включает в себя зажим и электрический двигатель, который выборочно перемещает зажим между первым положением, которое соответствует запертому положению запирающей системы, в котором узлы группы соединителей инструмента и трактора прикреплены друг к другу, и вторым положением, которое соответствует незапертому положению, в котором узлы группы соединителей инструмента и трактора могут перемещаться относительно друг друга; и
сцепной палец, который присоединен к узлу привода и приводится им для того, чтобы позволить оператору в тракторе удаленно вставлять сцепной палец через язык инструмента и тяговый стержень трактора.
20. Сцепная система по п.19, в которой сцепной палец присоединен ко второму гидравлическому цилиндру узла привода так, что сцепной палец и узел группы соединителей трактора перемещаются в унисон друг с другом.
| US 2011037241 A1, 17.02.2011 | |||
| СЦЕПНОЙ УЗЕЛ С НАПРАВЛЯЮЩИМ ЭЛЕМЕНТОМ | 2007 |
|
RU2441770C2 |
| US 2006240695 A1, 26.10.2006 | |||
| US 5458357 A, 17.10.1995 | |||
| US 2006245903 A1, 02.11.2006 | |||
| СПОСОБ ВЫЯВЛЕНИЯ ЗОН ПРЕДРАЗРУШЕНИЙ В СВАРНЫХ СОЕДИНЕНИЯХ ТЕПЛОУСТОЙЧИВЫХ СТАЛЕЙ | 2011 |
|
RU2457478C1 |

