Мотопланер относится к летательным аппаратам легкомоторной авиации и предназначен для обучения начинающих постигать азбуку безопасного пилотирования самолета.
В этой связи встала задача: создать конструкцию мотопланера, простого в управлении и безопасного в полете.
Из обзора технической информации видно, что аналогичная задача разрешалась в таких самодельных конструкциях самолетов, как: ХАИ-19, ХАИ-34, ХАИ-40, Арго-02, Малыш, Ленинградец, ПМК-3, Дон-Кихот, Полонез, А-12, Кри-Кри, Феникс 4-5, Аэропракт, Вирдман Т1-1 Винт-Динг 11, …
Из патентной информации известны аналоги в которых проблема безопасности полета разрешается узловым и детальным способом, например RU (21) 2009 107490/11 (13) A - в Евромаркапе разрешалась задача увеличения подъемной силы крыла; RU (11) 2399553 (13) C2 - Устройство и способ регулирования подъемной силы; RU (21) 2009 110283/11 (13) A - Узел шасси; RU (11) 2400407 (13) C1 - Блок хранения и подачи жидкого топлива для двигателя; RU 2384577 (13) C1 - Рулевой привод, снабженный компенсаторами; …
В качестве прототипа выбран патент RU (11) 2387578 (13) С1 - Система автоматического управления полетом высокоманевренным самолетам
Данное решение задачи безопасности полета в прототипе разрешено на более высоком уровне автоматизации, которое не требуется для впервые постигающих науку управления "тихоходным" самолетом потому, что в обучении пилотов придерживаются концепции обучения "от простого к сложному". К тому же, в прототипе датчики - это командная система, у которой есть система исполнения - приводы в системе управления, а это усложняет систему управления. Общеизвестно: чем больше узлов и деталей в машине, тем больше отказов в эксплуатации.
В предлагаемой конструкции мотопланера преследовалась цель безопасности полета за счет упрощения конструкции узлов и деталей в системе управления самолетом, которая продиктовала форму мотопланера, а ограничения, которые не допускают переход мотопланера за критические параметры полета, достигаются простым способом подбора соотношения длин рычагов в системе управления; увеличение подъемной силы несущего и вспомогательного крыла достигается путем их поворота соответственно на угол α и β, при этом вспомогательное крыло еще выполняет функции и крыла, и элерона, и закрылка; поворот мотопланера на земле и в воздухе выполняет передняя стойка шасси, оснащенная обтекателем, выполненным в форме поворотного киля; подача топлива к двигателю осуществляется принудительно и без энергетических затрат двигателя при помощи массы пилота; длина и площадь несущего крыла обеспечивают планирование мотопланера на достаточные расстояния для безопасной посадки при отказе двигателя.
Поставленная задача разрешается при помощи конструкции устройства мотопланера и системы управления.
Краткое описания чертежей.
На чертежах изображен мотопланер, где:
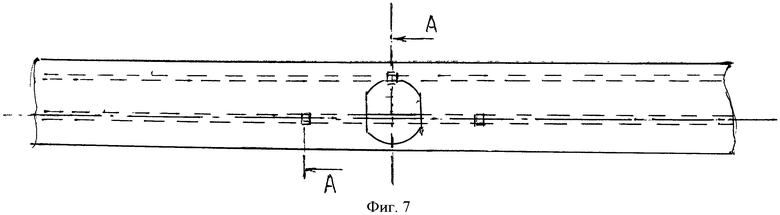
на фиг. 1 изображен вид сбоку компоновочной схемы мотопланера, а тяги системы управления изображены штрихпунктирными линиями;
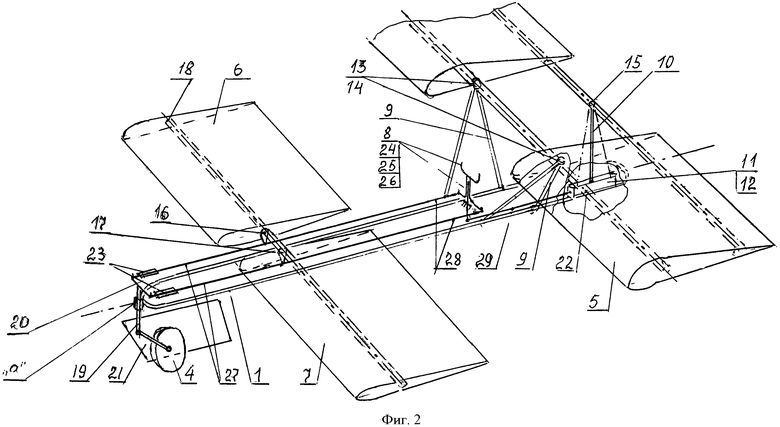
на фиг. 2 изображена общая схема системы управления мотопланером;
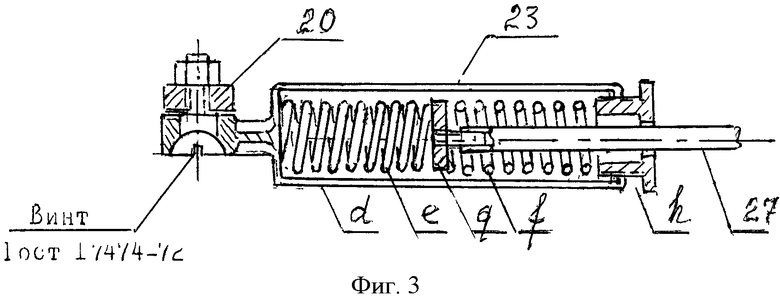
на фиг. 3 изображено соединение рычаг передней стойки шасси - компенсатор - тяга;
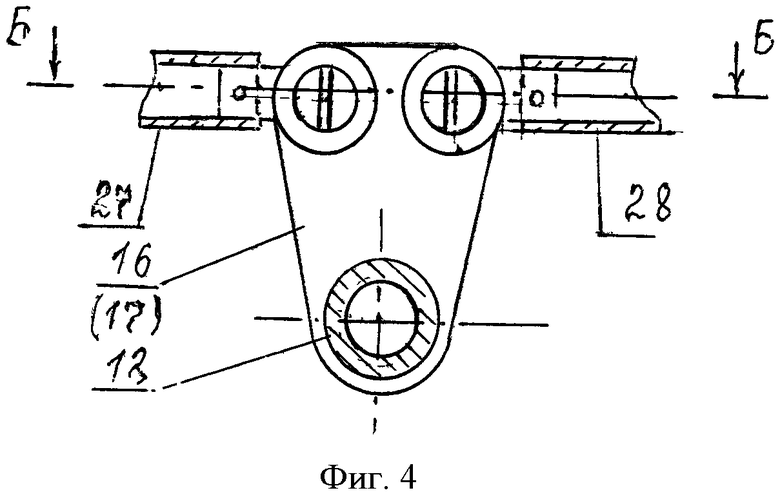
на фиг. 4 изображен узел соединения тяга - рычаг консоли - тяга;
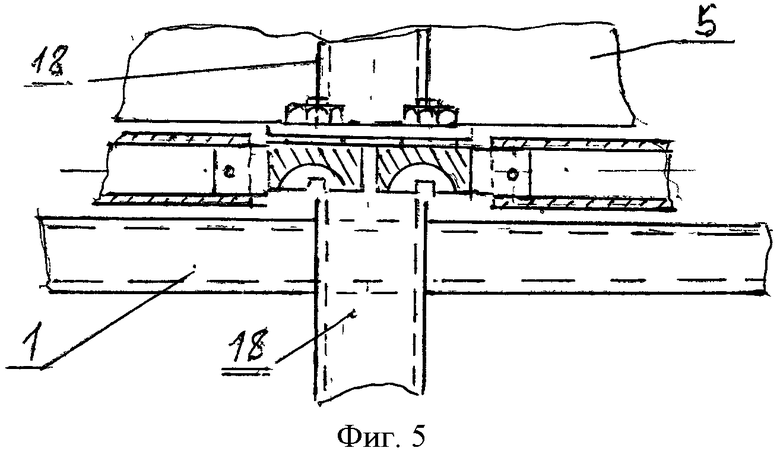
на фиг. 5 изображен вид сверху фиг. 4;
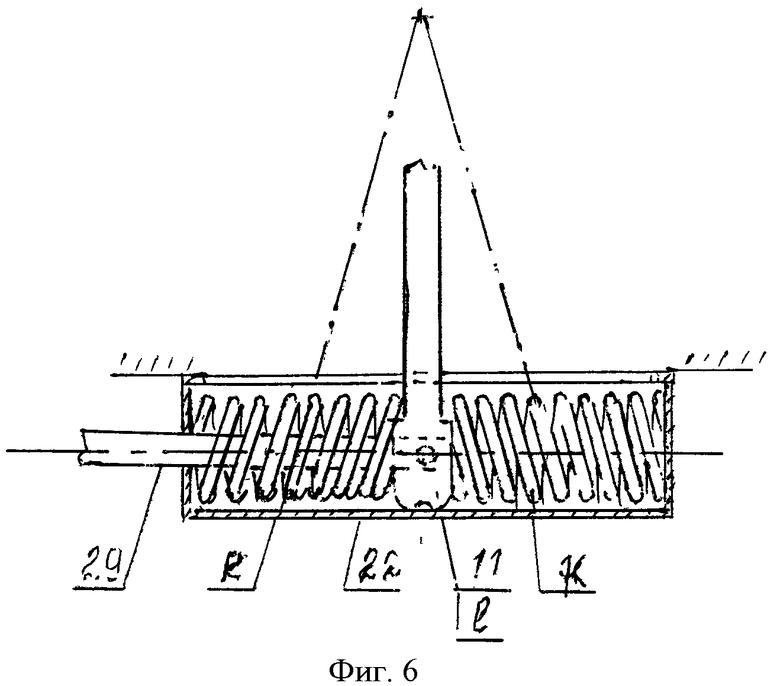
на фиг. 6 изображен компенсатор ползуна подвижной стойки несущего крыла (повернуто);
на фиг. 7 изображена схема размещения шарнирных узлов крепления несущего крыла;
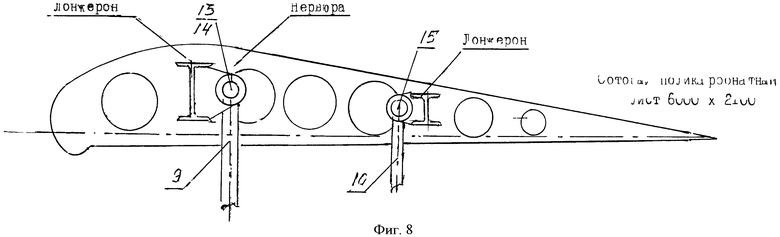
на фиг. 8 изображено сечение А-А на фиг. 7;
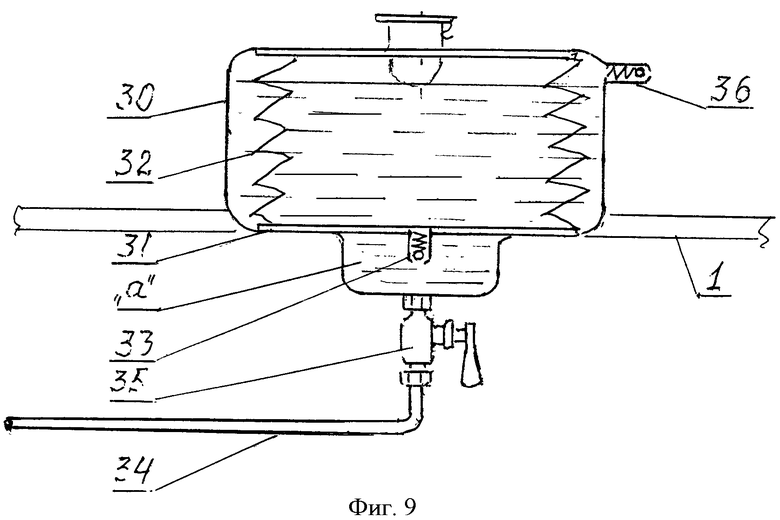
на фиг. 9 изображен топливный бак и его крепление к раме мотопланера.
Устройство мотопланера.
Мотопланер состоит из рамы 1, двигателя 2, шасси, основных колес 3, 3, переднего колеса 4, несущего крыла 5, вспомогательного крыла, состоящего из двух независимых консолей 6, 7, штурвала 8.
Рама 1 содержит втулку "а", две стационарные стойки 9, 9, закрепленные на раме сваркой, которые присоединяются к несущему крылу 5 шарнирными узлами 13, 14, стойку 10, закрепленную на крыле при помощи шарнирного узла 15 и шарнирно закрепленную на ползуне 11, размещенном в направляющих 12 рамы 1;
несущего крыла 5, оснащенного шарнирными узлами 13, 14, 15, расположенными на лонжеронах;
консолей 6, 7, оснащенных рычагами 16, 17, подвижно закрепленных на оси 18, закрепленной на раме неподвижно;
переднего колеса 4, шарнирно закрепленного на стойке 19, оснащенной двуплечим рычагом 20 и обтекателем 21;
ползун 11 оснащен компенсатором 22, состоящим из пружины "к" и шайбы l с резьбой;
двуплечий рычаг 20, закрепленный на стойке 19, оснащенной двумя компенсаторами - 23, 23, представляющими собой подобие талрепа, содержащего муфту d, пружины - е и f разделенные шайбой q, с резьбой, втулки - h с резьбой;
штурвала 8, содержащего стойку 24, трубку 25, снабженную двуплечим рычагом 26;
тяг 27, 27, оснащенных резьбой, тяг - 28, 28, тяги - 29 с резьбой.
Соединение тяг с рычагами осуществляется при помощи шарового соединения (отверстия наконечников тяг зенкуются под сферу винта Гост 17474-72) и этим же винтом крепится. Такое соединение исключает изгиб тяг, присоединяемых к рычагам, работающих во взаимно перпендикулярных плоскостях. Тяги, сделанные из трубки ПВХ, должны отвечать условиям:
устойчивости тяги: 
где φ - коэффициент изгиба, Е - модуль упругости, J - момент инерции, l - длина тяги, µ - коэффициент приведенной длины при шарнирном соединении равен единице.
прочности тяги: 
Регулировка системы управления осуществляется тягами компенсаторов 22, 23, 23, при этом система управления должна быть зафиксирована в нейтральном положении, при этом должно соблюдаться условие:
Q1+Q1=Q2,
где Q1=Q1 а O2=O2; Q1, Q1 - усилие пружин компенсаторов 23, 23, Q2 - усилие пружины компенсатора 22.
Рама 1 мотопланера снабжена мягким топливным баком 30, представляющим собой бак-сиденье пилота, чтобы массу пилота использовать в качестве энергии для принудительной подачи топлива от бака до двигателя, т.е. использовать как подкачивающую помпу топлива.
Бак 30 состоит из мягкого бензостойкого, прорезиненного материала, внутри которого размещены две рамки 31, между которыми по углам расположены пружины 32. Бак имеет прилив - резервную емкость - "а", отделенную от бака обратным клапаном 33 и присоединенную к трубопроводу 34, оснащенному краном 35. Бак снабжен атмосферным клапаном 36.
Работа механизмов управления.
Все исполнительные органы управления мотопланером: штурвал 8, колесо 4 с обтекателем 21, несущее крыло 5, консоли 6, 7 устанавливаются в нейтральное положение под воздействием пружин компенсаторов 22, 23, 23.
При взлете штурвал 8 подается на себя: рычаг 26 плечами толкает тяги 28, 28, которые с одинаковым усилием поворачивают рычаги 16, 17 консолей 6, 7 вниз, при этом конец стойки 24 тянет тягу 29, которая перемещает ползун 11 вперед, а вместе с ним и стойку 10, связанную шарнирным узлом 15 с крылом 5, и поворачивает крыло 5 на угол α.
При этом мотопланер обретает максимальную подъемную силу.
Плавный набор высоты осуществляется за счет разницы углов поворота консолей 6, 7 и крыла 5.
После набора безопасной высоты для маневрирования штурвал 8 устанавливается в нейтральное положение горизонтального полета.
Чтобы сделать поворот вправо (влево), штурвал поворачивается вправо, при этом правая тяга 28 потянет рычаг 16, а левая тяга 28 будет толкать рычаг 17, консоль 6 будет подниматься вверх, а консоль 7 повернется вниз - мотопланер сделает крен вправо, тяги 28, 28 передадут движение через рычаги 16, 17 на тяги 27, 27, а через компенсаторы 23, 23 - на рычаг 20, который повернет колесо с обтекателем вправо - мотопланер сделает правый разворот с креном. При этом несущее крыло 5 остаются в нейтральном положении.
При развороте вправо (влево) с набором высоты вначале устанавливается угол подъема, а затем следует разворот, как было описано выше
При посадке устанавливается угол посадочной глиссады: штурвал подается вперед, при этом тяга 29 смещается назад и сжимает пружину "к", удерживает ползун 11 в нейтральном положении, а тяги 28, 28 тянут рычаги 16, 17, которые поворачивают консоли 6, 7 вверх - осуществляется снижение мотопланера. Перед выходом из посадочной глиссады двигатель переводится на холостые обороты (или отключается). Штурвал 8 подается назад как при взлете, при этом несущее крыло 5 и консоли 6, 7 поворачиваются: консоли на угол β, а несущее крыло на угол α - мотопланер вновь обретает максимальную подъемную силу и тормозится аэродинамическим способом до приземления. На земле срабатывают тормоза основных колес 3, 3.
Двигатель обеспечивается топливом таким способом: при посадке пилота на сиденье пружины бака 30 сжимаются, атмосферный обратный клапан 36 запирает объем бака - создается избыточное давление. При этом топливный обратный клапан 33 отпирает проход для топлива из бака в резервную емкость "а". При открывании крана 35 топливо по трубопроводу 34 поступает к двигателю.
При эволюции мотопланера в воздухе, когда пилот находится "вниз головой" к горизонту, нагрузка на пружины 32 снимается, они растягивают бак, создавая внутри бака вакуум. При этом атмосферный обратный клапан 36 открывает доступ воздуха в бак, а топливный обратный клапан 33 запирает емкость "а", исключая доступ воздуха в трубопровод. В это время двигатель питается из резервной емкости "а", где давление было заперто.
При возврате мотопланера в горизонтальное положение, топливная система мотопланера начинает работать в штатном режиме.
Аналогичные устройства описаны в патентной информации B65B 31/04. - "Устройства и способ заполнения емкостей."
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ-СВВП | 2008 |
|
RU2406652C2 |
| МОТОПЛАНЕР | 1993 |
|
RU2073623C1 |
| СВЕРХЛЕГКИЙ САМОЛЕТ | 2005 |
|
RU2336200C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| МНОГОЦЕЛЕВОЙ ВЫСОКОМАНЕВРЕННЫЙ СВЕРХЗВУКОВОЙ САМОЛЕТ, ЕГО АГРЕГАТЫ ПЛАНЕРА, ОБОРУДОВАНИЕ И СИСТЕМЫ | 1996 |
|
RU2207968C2 |
| Мотодельтаплан | 1991 |
|
SU1821422A1 |
| ДВУХМОТОРНЫЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ НАЗЕМНОГО И ВОДНОГО БАЗИРОВАНИЯ С УКОРОЧЕННЫМ И ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ "ЛАДОГА-9 УВ" | 2001 |
|
RU2196707C2 |
| МИКРОСАМОЛЕТ ДЛЯ ИНВАЛИДОВ | 1993 |
|
RU2104223C1 |
| Беспилотный летательный аппарат вертикального взлёта и посадки и способ его изготовления | 2023 |
|
RU2819460C1 |
| КОНВЕРТОПЛАН С РЕАКТИВНЫМ ПРИВОДОМ РОТОРОВ, УПРАВЛЯЕМЫЙ РОТОРАМИ ПОСРЕДСТВОМ АВТОМАТОВ ПЕРЕКОСА ЧЕРЕЗ РЫЧАГИ УПРАВЛЕНИЯ, НЕ ТРЕБУЮЩИЙ ДОПОЛНИТЕЛЬНЫХ СРЕДСТВ УПРАВЛЕНИЯ | 2013 |
|
RU2570241C2 |
Изобретение относится к летательным аппаратам легкомоторной авиации. Мотопланер содержит фюзеляж, двигатель, несущее крыло и вспомогательное крыло, рычаги приводов в управлении крыльев, руля поворота, колеса, руля высоты. Несущее крыло оснащено шарнирными узлами, из которых два расположены симметрично относительно поперечной оси симметрии на лонжероне. Один шарнирный узел расположен на вспомогательном лонжероне и закреплен на стойке, которая закреплена шарнирно на ползуне, подвижно установленном в направляющих рамы, и связан со стойкой штурвала подпружиненной тягой. Вспомогательное крыло состоит из двух независимых консолей, посаженных подвижно на поперечную ось, неподвижно закрепленную в носовой части рамы, оснащенных рычагами, связанными тягами с двуплечим рычагом штурвала. Стойка переднего колеса, подвижно закрепленная во втулке рамы, оснащена обтекателем колеса, выполненным в форме поворотного киля, и оснащена двуплечим рычагом, снабженным компенсаторами. Изобретение направлено на повышение безопасности полета. 1 з.п. ф-лы, 9 ил.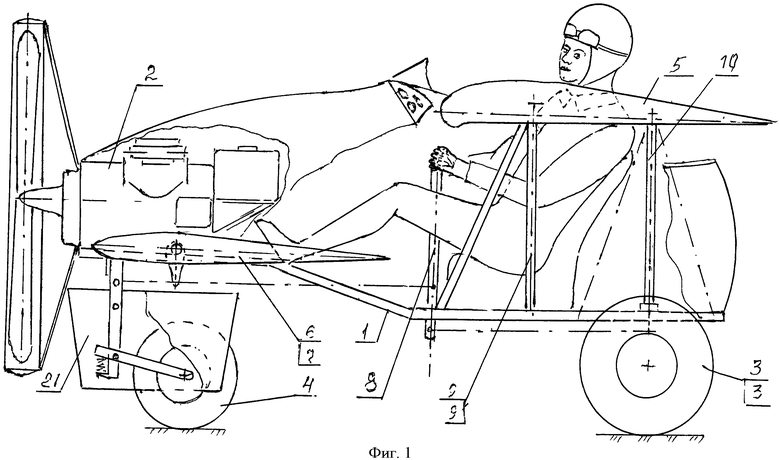
1. Мотопланер, состоящий из: фюзеляжа, двигателя, несущего крыла, стабилизатора, киля, трехстоечного шасси и системы управления из тяг и качалок, кинематически связанных с ручкой управления, отличающийся тем, что несущее крыло оснащено шарнирными узлами, из которых два расположены симметрично относительно поперечной оси симметрии несущего крыла на лонжероне, проходящем через центр подъемной силы несущего крыла, присоединены к стойкам, закрепленным на раме сваркой; один шарнирный узел расположен на вспомогательном лонжероне, на пересечении с поперечной осью симметрии крыла, и закреплен на стойке, которая закреплена шарнирно на ползуне, подвижно установленном в направляющих рамы, и связан со стойкой штурвала подпружиненной тягой, а вспомогательное крыло состоит из двух независимых консолей, посаженных подвижно на поперечную ось, неподвижно закрепленную в носовой части рамы, оснащенных рычагами, связанными тягами с двуплечим рычагом штурвала, при этом стойка переднего колеса, подвижно закрепленная во втулке рамы, оснащена обтекателем колеса, выполненным в форме поворотного киля, оснащена двуплечим рычагом, снабженным компенсаторами, представляющими собой муфту, в которой размещены пружины, разделенные шайбой, в которую ввинчиваются концы тяг, присоединяемых к рычагам консолей шаровым соединением.
2. Мотопланер по п.1, отличающийся тем, что топливный бак выполнен из эластичного бензостойкого материала, расположенного под сиденьем пилота, внутренняя полость которого разделена диафрагмой на две неравные полости, верхняя полость снабжена двумя рамками, между которыми по углам закреплены пружины, и сообщается с атмосферой и нижней полостью через обратные клапаны, а нижняя полость через кран и трубопровод сообщается с карбюратором двигателя.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2009 |
|
RU2387578C1 |
| МОТОПЛАНЕР | 1993 |
|
RU2073623C1 |
| US 4088285 A1, 09.05.1978; | |||
| JP 2009012486 A, 22.01.2009 | |||

