Область техники, к которой относится изобретение
Заявляемое изобретение относится к горному и строительно-дорожному машиностроению, а именно к экскаваторам, которые могут использоваться, в частности на открытых горных работах (карьерах) в черной и цветной металлургии, в угольной промышленности, а также для выполнения земляных работ в промышленном строительстве.
Уровень техники
В настоящее время на карьерных экскаваторах применяются зубчато-реечные, канатно-полиспастные и гидравлические механизмы рукояти.
Из уровня техники известны зубчато-реечные напорные механизмы, включающие шестеренки, расположенные на валу седлового подшипника и находящиеся в постоянном зацеплении с приваренными к рукояти зубчатыми рейками (кремальерами) (SU 568705, публ. 15.08.1977, SU 613017, публ. 30.06.1978, SU 638681, публ. 25.12.1978, SU 901389, публ. 30.01.1982, RU 98017 U1, публ. 27.09.2010).
Основной недостаток известных зубчато-реечных напорных механизмов заключается в том, что зубчатая передача является открытой, что способствует попаданию частиц извлекаемой породы и/или посторонних предметов, а также она подвержена агрессивному воздействию окружающей среды, в частности атмосферных осадков, что наряду с отсутствием постоянной смазки снижает надежность работы напорного механизма и сокращает срок его службы. Кроме того, напорный механизм имеет низкий КПД (открытая зубчатая передача) и требует применения привода большой мощности.
Из уровня техники известны канатно-полиспастные напорные механизмы (SU 1788997, публ. 26.11.1990, SU 688562, публ. 03.05.1978, RU 2012727 C1, публ. 15.05.1994, RU 2455425, публ. 10.07.2012).
Недостаток известных канатно-полиспастных напорных механизмов заключается в том, что канат (трос), проходя через полиспасты, закрепленные на рукояти, находится в постоянном изгибе, что способствует усиленному износу, вытягиванию каната (сход с полиспастов) и возможному обрыву, что требует постоянного внимания при работе и проведения частого технического обслуживания. Кроме того, узлы напорного механизма является открытыми, что способствует попаданию частиц извлекаемой породы и/или посторонних предметов, и следовательно, приводит к быстрому износу и обрыву каната. Также вышеназванные узлы подвержены агрессивному воздействию окружающей среды, в частности атмосферных осадков, что наряду с отсутствием постоянной смазки снижает надежность работы напорного механизма и сокращает срок его службы. Кроме того, напорный механизм имеет низкий КПД и требует применения привода большой мощности, а также установки дополнительного барабана для каната полиспастного механизма.
Из уровня техники известны гидравлические напорные механизмы, включающие гидростанцию, гидроцилиндры, расположенные на рукояти и ковше (RU 112220 U1, публ. 10.01.2012, RU 127771 U1, публ. 10.05.2013, RU 122670 U1, публ. 10.12.2012, RU 116319 U1, публ. 27.05.2012).
Недостатки известных устройств с гидравлическим механизмом заключаются в том, что для эксплуатации экскаваторов в условиях разработки в карьере требуются высококвалифицированные специалисты-гидравлики и должна быть обеспечена стерильность при ремонте гидравлической аппаратуры, где заливаемое масло должно быть тщательно отфильтровано, поскольку попадание воды и воздуха при ремонте в карьере резко ухудшает технические параметры гидросистемы. Также при применении гидравлических механизмов возможны утечки из гидросистемы заливаемого масла, что приводит к снижению КПД и экологическому загрязнению почвы.
Сведения, подтверждающие реализацию изобретения
Задача, на решение которой направлено заявляемое изобретение, состоит в создании механизма напора рукояти экскаватора с повышенными эксплуатационными характеристиками.
Технический результат, достигаемый при реализации заявляемого изобретения, заключается в повышении КПД напорного механизма за счет образования пары «винт-гайка», обеспечивающей плавное возвратно-поступательное движение рукояти при передачи большего нажимного усилия на ковш при приложенном меньшем усилии привода, что не требует использования привода большой мощности, в повышении надежности работы напорного механизма и увеличении его срока службы за счет размещения внутри рукояти, что исключает попадание частиц извлекаемой породы и/или посторонних предметов.
Заявляемый технический результат достигается за счет того, что механизм напора рукояти экскаватора включает привод, установленный на одном из концов рукояти, гайку, размещенную в седловом подшипнике, проходящий через гайку винт, установленный внутри рукояти таким образом, что один из его концов соединен с приводом, при этом в рукояти выполнен продольный паз для обеспечения зацепления гайки с винтом и перемещения рукояти.
Кроме того, в частном случае реализации изобретения в качестве привода используют мотор-редуктор.
Также технический результат достигается за счет того, что экскаватор содержит ходовую тележку с установленной на ней поворотной рамой, на которой размещены машинное отделение, кабина машиниста с системой управления экскаватором, стрела с шарнирно закрепленным седловым подшипником, рабочее оборудование, включающее ковш, рукоять, проходящую через седловый подшипник и соединенную одним концом с ковшом, механизм напора рукояти, включающий привод, установленный на одном из концов рукояти, гайку, размещенную в седловом подшипнике, и винт, проходящий через гайку, установленный внутри рукояти таким образом, что один из его концов соединен с приводом, при этом в рукояти выполнен продольный паз для обеспечения зацепления гайки с винтом и перемещения рукояти.
Кроме того, в частном случае реализации изобретения привод напорного механизма рукояти подключен к системе управления экскаватором.
Кроме того, в частном случае реализации изобретения экскаватор снабжен централизованной системой, обеспечивающей подачу масла в рукоять для смазывания винта и гайки.
Осуществление изобретения
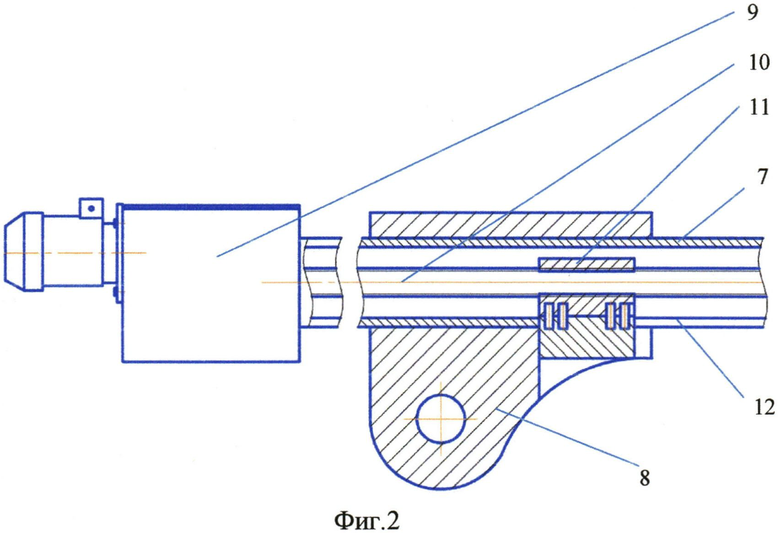
На фиг. 1 - общий вид экскаватора; на фиг. 2 - механизм напора рукояти в разрезе, вид сбоку.
Экскаватор (фиг. 1) содержит ходовую тележку 1, на которой установлена поворотная рама 2 с установленным оборудованием (на чертежах не показано), машинное отделение 3, кабина машиниста 4 с системой управления экскаватором (на чертежах не показано), стрела 5, рабочее оборудование, включающее ковш 6 с механизмом открывания (на чертежах не показано), рукоять 7 с напорным механизмом, седловый подшипник 8, шарнирно соединенный со стрелой 5.
Механизм напора рукояти 7 (фиг. 2) включает привод 9, в частном случае мотор-редуктор, установленный на одном из концов рукояти 7, которая другим концом соединяется с ковшом 6, винт 10, размещенный внутри рукояти 7 и одним концом соединенный с приводом 9, а другим концом закрепленный внутри рукояти 7, гайку 11, установленную в седловом подшипнике 8, через которую проходит винт 10. В рукояти 7 выполнен продольный паз 12 для обеспечения зацепления гайки 11 с винтом 10 и перемещения рукояти. Привод 9 подключен к системе управления экскаватором (на чертежах не показано) и передает вращательное движение винту 10, который поступательно перемещается совместно с рукоятью 7 в продольном пазу 12.
Экскаватор снабжен централизованной системой смазки (на чертежах не показано), обеспечивающей подачу масла в рукоять для смазывания винта 10 и гайки 11 с целью повышения надежности их работы.
Механизм напора рукояти 7 работает следующим образом. При черпании горной породы привод 9 передает вращение винту 10, который, проходя через гайку 11, обеспечивает плавное перемещение (выдвижение) рукояти 7 и винта 10 в сторону ковша 6, передавая ему напорное усилие. При изменении направления вращения привода 9 рукоять 7 и винт 10 перемещаются в обратную сторону (втягивание), передавая на ковш 6 возвратное усилие (холостой ход).
Таким образом, образование пары «винт-гайка» для преобразования вращательного движения привода 9 в поступательное движение рукояти 7 и винта 10 позволяет приложить большее напорное усилие на ковш 6 при меньшем приложенном усилии на сам винт 10, что приводит к повышению КПД напорного механизма. Кроме того, при размещении механизма «винт-гайка» в рукояти 7 исключается возможность попадания частиц извлекаемой породы в механизм и воздействие на него окружающей среды, а также обеспечивается возможность для постоянной смазки механизма маслом, что повышает надежность работы напорного механизма и увеличивает срок его службы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭКСКАВАЦИЕЙ ГРУНТА И ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2436900C2 |
| УНИФИЦИРОВАННЫЙ ЭКСКАВАТОР | 2008 |
|
RU2379426C2 |
| Рабочее оборудование одноковшового экскаватора | 1977 |
|
SU635175A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2011 |
|
RU2491389C2 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА (ВАРИАНТЫ) | 2008 |
|
RU2407861C2 |
| Рабочее оборудование экскаватора | 1989 |
|
SU1700149A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2014 |
|
RU2577870C2 |
| Одноковшовый карьерный экскаватор | 1989 |
|
SU1745821A1 |
| Напорный механизм одноковшового экскаватора | 1980 |
|
SU901389A1 |
| Рабочее оборудование экскаватора | 1983 |
|
SU1104207A1 |
Изобретение относится к горному и строительно-дорожному машиностроению, а именно к экскаваторам, которые используются, в частности на открытых горных работах. Экскаватор содержит ходовую тележку с установленной на ней поворотной рамой, на которой размещены машинное отделение, кабина машиниста с системой управления экскаватором, стрела с шарнирно закрепленным седловым подшипником. Рабочее оборудование включает ковш, рукоять, проходящую через седловый подшипник и соединенную одним концом с ковшом. Механизм напора рукояти включает привод, установленный на одном из концов рукояти, гайку, размещенную в седловом подшипнике, и винт, проходящий через гайку, установленный внутри рукояти таким образом, что один из его концов соединен с приводом. В рукояти выполнен продольный паз для обеспечения зацепления гайки с винтом и перемещения рукояти. Технический результат - повышение КПД напорного механизма за счет образования пары «винт-гайка» и смазки, обеспечивающей плавное возвратно-поступательное движение рукояти и передачу большего нажимного усилия на ковш при приложенном меньшем усилии привода, повышение надежности работы напорного механизма. 2 н. и 4 з.п. ф-лы, 2 ил.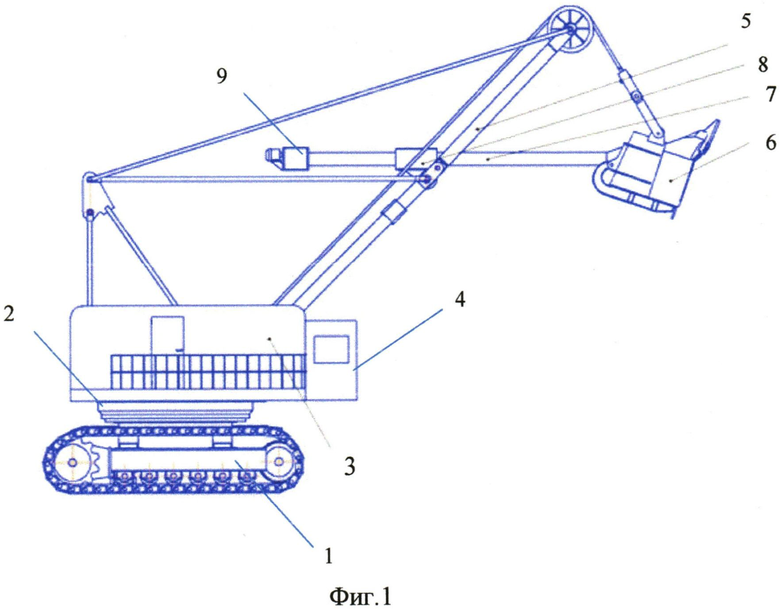
1. Механизм напора рукояти экскаватора, включающий привод, установленный на одном из концов рукояти, гайку, размещенную в седловом подшипнике, проходящий через гайку винт, установленный внутри рукояти таким образом, что один из его концов соединен с приводом, при этом в рукояти выполнен продольный паз для обеспечения зацепления гайки с винтом и перемещения рукояти.
2. Механизм напора рукояти экскаватора по п. 1, отличающийся тем, что в качестве привода используют мотор-редуктор.
3. Экскаватор, содержащий ходовую тележку с установленной на ней поворотной рамой, на которой размещены машинное отделение, кабина машиниста с системой управления экскаватором, стрела с шарнирно закрепленным седловым подшипником, рабочее оборудование, включающее ковш, рукоять, проходящую через седловый подшипник и соединенную одним концом с ковшом, механизм напора рукояти, включающий привод, установленный на одном из концов рукояти, гайку, размещенную в седловом подшипнике, и винт, проходящий через гайку, установленный внутри рукояти таким образом, что один из его концов соединен с приводом, при этом в рукояти выполнен продольный паз для обеспечения зацепления гайки с винтом и перемещения рукояти.
4. Экскаватор по п. 3, отличающийся тем, что в качестве привода напорного механизма используют мотор-редуктор.
5. Экскаватор по п. 3, отличающийся тем, что привод напорного механизма рукояти подключен к системе управления экскаватором.
6. Экскаватор по п. 3, отличающийся тем, что снабжен централизованной системой, обеспечивающей подачу масла в рукоять для смазывания винта и гайки.
| Телескопическая стрела | 1990 |
|
SU1773853A1 |
| Рабочее оборудование экскаватора | 1989 |
|
SU1700149A1 |
| Телескопическая стрела | 1989 |
|
SU1745669A1 |
| МЕХАНИЗМ ВЫДВИЖЕНИЯ ТЕЛЕСКОПИЧЕСКОЙ СТРЕЛЫ | 1995 |
|
RU2083471C1 |
| US 20070157491 A1, 12.07.2007 | |||

