Изобретение относится к измерительной технике, а именно к способу определения углового положения (в частности, угла крена) объекта, стабилизированного вращением (ОСВ), в пространстве, и может быть использовано в космической технике в бортовых системах управления движением ОСВ.
В настоящее время остро стоит задача расширения функциональных возможностей глобальных навигационных спутниковых систем, в частности при определении углового положения объекта. При этом возникают проблемы повышения точности.
Известен способ определения угла крена объекта, стабилизированного вращением [Гироскопические системы, ч.2, Гироскопические приборы и системы: П.В. Бромберг, И.А. Михалев, Е.А. Никитин и др. Под ред. Д.С. Пельпора. М.: Высшая школа, 1971 г., стр.82], заключающийся в том, что начиная с момента начала движения t0, на который известен априори угол крена объекта φнач, измеряют угловую скорость вращения ОСВ ω(t), путем интегрирования которой по времени от момента t0 до конечного известного момента tk определяют величину изменения угла крена объекта, а величину угла крена φ(tk) на момент tk определяют согласно выражению:
Данный способ наиболее близок по технической сущности к заявляемому и поэтому принят за прототип.
Недостатком известного способа является относительно низкая точность определения угла крена. Одна из основных проблем обеспечения точности ориентации и навигации для ОСВ состоит в уменьшении влияния погрешностей, зависящих от продольной составляющей угловой скорости, в первую очередь, ошибки масштабного коэффициента датчика угловой скорости (ДУС), ось чувствительности которого параллельна оси вращения ОСВ. В данном способе при определении угла крена на требуемый момент tk непрерывно измеряют и интегрируют угловую скорость вращения объекта ω(t), что ведет к накоплению ошибки определения изменения угла ОСВ на требуемый момент tk, величина которой пропорциональна времени наблюдения (всего периода времени на интервале t0…tk) и ошибке измерения угловой скорости.
Задачей заявляемого изобретения является повышение точности определения угла крена объекта, стабилизированного вращением, в плоскости движения.
Техническим результатом, на достижение которого направлено заявляемое изобретение, является снижение накапливаемой ошибки определения изменения величины угла крена путем сокращения времени наблюдения за изменением углового положения объекта и повышения точности определения угловой скорости вращения ОСВ путем перехода к использованию нового физического параметра, на основе которого определяется угловая скорость вращения ОСВ, а именно - к измерению периода вращения ОСВ.
Технический результат достигается тем, что в способе определения угла крена объекта, стабилизированного вращением (ОСВ), заключающемся в том, что начиная с момента начала движения t0, на который известен априори угол крена объекта φнач, измеряют угловую скорость вращения ОСВ ω(t), путем интегрирования которой по времени от момента t0 до конечного момента tk определяют величину изменения угла крена объекта, а величину угла крена φ(tk) на момент tk определяют согласно выражению:  , согласно изобретению производят наблюдение за физическим параметром P(t), функционально связанным с изменением угла крена ОСВ, формируют, по меньшей мере, два раза момент τ0, являющийся характерной точкой изменения физического параметра во времени, например переходом физического параметра P(t) через «ноль» на участке установившегося движения, а интегрирование угловой скорости вращения ОСВ по времени осуществляют от момента начала движения t0 до первого сформированного момента
, согласно изобретению производят наблюдение за физическим параметром P(t), функционально связанным с изменением угла крена ОСВ, формируют, по меньшей мере, два раза момент τ0, являющийся характерной точкой изменения физического параметра во времени, например переходом физического параметра P(t) через «ноль» на участке установившегося движения, а интегрирование угловой скорости вращения ОСВ по времени осуществляют от момента начала движения t0 до первого сформированного момента 
 , причем наблюдение за физическим параметром P(t) прекращают до возобновления в момент сформированного последующего второго момента
, причем наблюдение за физическим параметром P(t) прекращают до возобновления в момент сформированного последующего второго момента 
 , где τ - измеренное время от
, где τ - измеренное время от
Формирование, по меньшей мере, два раза момента τ0, который является характерной точкой изменения физического параметра во времени, например переходом физического параметра P(t) через «ноль» на участке установившегося движения относительно продольной оси вращения, интегрирование угловой скорости вращения ОСВ по времени от момента начала движения t0 до первого сформированного момента
С целью расширения возможностей применения устройства, реализующего заявляемый способ, формирование момента
 относительно момента
относительно момента 
 , где τ - измеренное время от
, где τ - измеренное время от 
Цикличность формирования момента начала отсчета изменения угла крена
Наличие в заявленном изобретении признаков, отличающих его от прототипа, позволяет его считать соответствующим условию "новизна".
Новые признаки, которые содержит отличительная часть формулы изобретения, не выявлены в технических решениях аналогичного назначения. На этом основании можно сделать вывод о соответствии заявляемого изобретения условию «изобретательский уровень».
Изобретение поясняется чертежами:
на фиг.1 представлена циклограмма функционирования ОСВ на траектории движения;
на фиг.2 представлен график изменения параметра P(t) во времени, величина которого функционально связана с изменением углового положения объекта, стабилизированного вращением с заданным конечным временем движения tk;
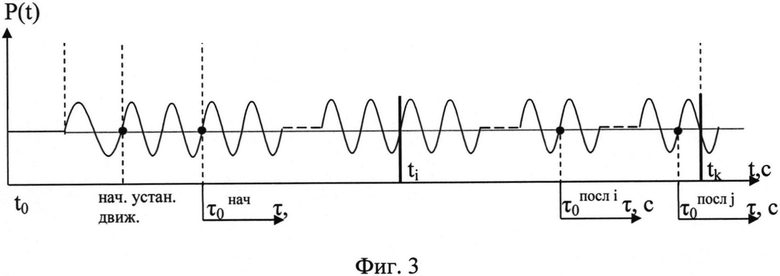
на фиг.3 представлен график изменения параметра P(t) во времени, величина которого функционально связана с изменением углового положения ОСВ, где формирование момента
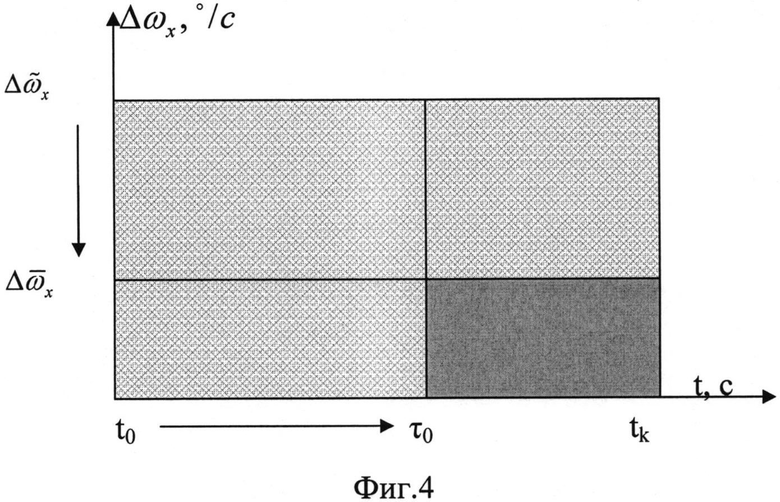
на фиг.4 представлен график, демонстрирующий снижение накапливаемой ошибки определения изменения величины угла крена путем сокращения времени наблюдения за изменением углового положения объекта и повышением точности определения угловой скорости вращения.
Способ осуществляется следующим образом.
При движении объекта, стабилизированного вращением, в безвоздушном пространстве с учетом на момент его начала движения t0 известного априори угла крена φнач проводят наблюдение за изменением во времени параметра P(t) (фиг.1, 2). Параметр P(t) является синусоидальной функцией. Величина параметра P(t) функционально связана с изменением угла крена ОСВ (например, параметром P(t) могут быть величины проекций вектора напряженности магнитного поля Земли на поперечные оси связанной системы координат ОСВ и/или поперечные составляющие вектора угловой скорости вращения ОСВ).
Далее при движении объекта формируют первый момент 
Далее наблюдение за физическим параметром P(t) прекращают до возобновления в момент сформированного последующего момента
 , где τ - измеренное время от
, где τ - измеренное время от
Определение Тпосл в момент 
С целью расширения возможностей применения устройства, реализующего заявляемый способ, формирование момента
 относительно момента
относительно момента
 , где τ - измеренное время от
, где τ - измеренное время от
Согласно полученным на основе математического моделирования данным определение угла крена, осуществленное заявляемым способом, оценивается на уровне 0,1°. График, представленный на фиг.4, наглядно демонстрирует снижение накапливаемой ошибки определения изменения величины угла крена путем сокращения времени наблюдения за изменением углового положения объекта и повышением точности определения угловой скорости вращения. Цикличность формирования момента начала отсчета изменения угла крена
Таким образом, представленные сведения свидетельствуют о выполнении при использовании заявляемого изобретения следующей совокупности условий:
- средство, воплощающее заявляемый способ при его осуществлении, предназначено для определения углового положения (в частности, угла крена) объекта, стабилизированного вращением, в плоскости движения;
- повышение точности определения угла крена ОСВ;
- для заявляемого способа в том виде, в котором он охарактеризован в формуле изобретения, подтверждена возможность его осуществления с помощью описанных в заявке и известных до даты приоритета средств и методов.
Следовательно, заявляемое изобретение соответствует условию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ОБЪЕКТА, СТАБИЛИЗИРОВАННОГО ВРАЩЕНИЕМ | 2014 |
|
RU2577175C1 |
| СПОСОБ УПРАВЛЕНИЯ АВИАЦИОННОЙ БУКСИРОВОЧНОЙ ТРОСОВОЙ СИСТЕМОЙ | 2009 |
|
RU2395430C1 |
| Способ коррекции углов ориентации БИНС на скользящем интервале | 2022 |
|
RU2790076C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СМАЧИВАЕМОСТИ МЕЛКОДИСПЕРСНЫХ ПОРОШКОВ | 2013 |
|
RU2522805C1 |
| СИСТЕМА ИЗМЕРЕНИЯ УГЛОВЫХ ПОЛОЖЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2244262C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2555496C1 |
| СПОСОБ НАВИГАЦИОННЫХ ОПРЕДЕЛЕНИЙ ПО ИНТЕГРАЛЬНЫМ ПАРАМЕТРАМ | 1997 |
|
RU2125732C1 |
| СПОСОБ КОНТРОЛЯ ЛИНЕЙНЫХ И УГЛОВЫХ ОТКЛОНЕНИЙ ОТ ВЕРТИКАЛЬНОГО НАПРАВЛЕНИЯ ДЛЯ ДИСТАНЦИОННОГО МОНИТОРИНГА АНТЕННО-МАЧТОВЫХ СООРУЖЕНИЙ | 2011 |
|
RU2477454C1 |
| СПОСОБ ПОДДЕРЖАНИЯ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА С СИЛОВЫМИ ГИРОСКОПАМИ И ЦЕЛЕВОЙ НАГРУЗКОЙ | 2006 |
|
RU2356802C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПОЛОЖЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2256154C1 |

Изобретение относится к измерительной технике, а именно к способу определения углового положения (в частности, угла крена) объекта, стабилизированного вращением (ОСВ), в пространстве. Способ определения угла крена объекта, стабилизированного вращением (ОСВ), заключается в том, что начиная с момента начала движения t0, на который известен априори угол крена объекта φнач, измеряют угловую скорость вращения ОСВ ω(t), путем интегрирования которой по времени от момента τ0 до конечного известного момента tk определяют величину изменения угла крена объекта, а величину угла крена φ(tk) на момент tk определяют согласно выражению:  . При этом производят наблюдение за физическим параметром P(t), функционально связанным с изменением угла крена ОСВ, формируют, по меньшей мере, два раза момент τ0, являющийся характерной точкой на графике изменения физического параметра, например переходом физического параметра P(t) через «ноль» на участке установившегося движения. А интегрирование угловой скорости вращения ОСВ по времени осуществляют от момента начала движения t0 до первого сформированного момента τ0 нач и фиксируют величину интеграла -
. При этом производят наблюдение за физическим параметром P(t), функционально связанным с изменением угла крена ОСВ, формируют, по меньшей мере, два раза момент τ0, являющийся характерной точкой на графике изменения физического параметра, например переходом физического параметра P(t) через «ноль» на участке установившегося движения. А интегрирование угловой скорости вращения ОСВ по времени осуществляют от момента начала движения t0 до первого сформированного момента τ0 нач и фиксируют величину интеграла -  . Причем наблюдение за физическим параметром P(t) прекращают до возобновления в момент сформированного последующего второго момента τ0 посл, максимально приближенного к моменту tk, при этом изменение угла крена Δφ(t) относительно момента τ0 посл вычисляют согласно выражению:
. Причем наблюдение за физическим параметром P(t) прекращают до возобновления в момент сформированного последующего второго момента τ0 посл, максимально приближенного к моменту tk, при этом изменение угла крена Δφ(t) относительно момента τ0 посл вычисляют согласно выражению:  , где τ - измеренное время от τ0 посл до момента tk; Тпосл - измеренный период вращения в процессе формирования момента τ0 посл, а величину угла крена объекта φ(tk) на момент tk определяют согласно выражению:
, где τ - измеренное время от τ0 посл до момента tk; Тпосл - измеренный период вращения в процессе формирования момента τ0 посл, а величину угла крена объекта φ(tk) на момент tk определяют согласно выражению:  . Изобретение обеспечивает повышение точности определения угла крена ОСВ. 1 з.п. ф-лы, 4 ил.
. Изобретение обеспечивает повышение точности определения угла крена ОСВ. 1 з.п. ф-лы, 4 ил.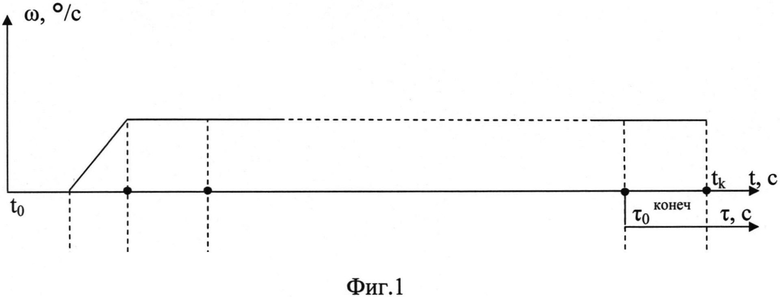
1. Способ определения угла крена объекта, стабилизированного вращением (ОСВ), заключающийся в том, что начиная с момента начала движения t0, на который известен априори угол крена объекта φнач,
измеряют угловую скорость вращения ОСВ ω(t), путем интегрирования которой по времени от момента t0 до конечного известного момента tk определяют величину изменения угла крена объекта, а величину угла крена φ(tk) на момент tk определяют согласно выражению:
 , отличающийся тем, что производят наблюдение за физическим параметром P(t), функционально связанным с изменением угла крена ОСВ, формируют, по меньшей мере, два раза момент τ0, являющийся характерной точкой на графике изменения физического параметра, например переходом физического параметра P(t) через «ноль» на участке установившегося движения, а интегрирование угловой скорости вращения ОСВ по времени осуществляют от момента начала движения t0 до первого сформированного момента τ0 нач и фиксируют величину интеграла -
, отличающийся тем, что производят наблюдение за физическим параметром P(t), функционально связанным с изменением угла крена ОСВ, формируют, по меньшей мере, два раза момент τ0, являющийся характерной точкой на графике изменения физического параметра, например переходом физического параметра P(t) через «ноль» на участке установившегося движения, а интегрирование угловой скорости вращения ОСВ по времени осуществляют от момента начала движения t0 до первого сформированного момента τ0 нач и фиксируют величину интеграла -  , причем наблюдение за физическим параметром P(t) прекращают до возобновления в момент сформированного последующего второго момента τ0 посл, максимально приближенного к моменту tk, при этом изменение угла крена Δφ(t) относительно момента τ0 посл вычисляют согласно выражению:
, причем наблюдение за физическим параметром P(t) прекращают до возобновления в момент сформированного последующего второго момента τ0 посл, максимально приближенного к моменту tk, при этом изменение угла крена Δφ(t) относительно момента τ0 посл вычисляют согласно выражению:
 , где
, где
τ - измеренное время от τ0 посл до момента tk;
Тпосл - измеренный период вращения в процессе формирования момента τ0 посл, а величину угла крена объекта φ(tk) на момент tk определяют согласно выражению:
 .
.
2. Способ определения угла крена объекта по п.1, отличающийся тем, что формирование момента τ0 посл, максимально приближенного к моменту tk, осуществляют циклически j-раз, начиная с произвольного момента времени ti после формирования момента τ0 нач вплоть до момента tk, а наблюдение за физическим параметром P(t) прекращают до возобновления в момент времени ti, при этом изменение угла крена относительно момента τ0 посл j, сформированного последний раз перед моментом tk, вычисляют согласно выражению:
 , где
, где
τ - измеренное время от τ0 посл j до момента tk;
Тпосл - измеренный период вращения в процессе формирования момента τ0 посл j.
| Гироскопические системы, ч.2, Гироскопические приборы и системы: П.В | |||
| БРОМБЕРГ, И.А | |||
| МИХАЛЕВ, Е.А | |||
| НИКИТИН и др | |||
| Под ред | |||
| Д.С | |||
| ПЕЛЬПОРА | |||
| М.: Высшая школа, 1971 г, стр.82 | |||
| СПОСОБ КОРРЕКЦИИ КОМАНДНОГО СИГНАЛА НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2257523C1 |
| Основы радиоуправления, ПОД РЕД | |||
| ВЕЙЦЕЛЯ В.А | |||
| И ТИПУГИНА В.Н., Москва, “Советское радио”, 1973 г., стр.52, 53, рис.1.31 | |||
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, РАКЕТА, ВРАЩАЮЩАЯСЯ ПО УГЛУ КРЕНА, СПОСОБ ФОРМИРОВАНИЯ ДВУХСКАТНОГО ЛИНЕАРИЗИРОВАННОГО СИГНАЛА И ПЕРЕКЛЮЧАЕМЫЙ ЛИНЕАРИЗАТОР СИГНАЛА | 2005 |
|
RU2283466C1 |
| СПОСОБ УПРАВЛЕНИЯ СПУСКОМ КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТ | 2012 |
|
RU2493059C1 |

