(54) МАНИПУЛЯЦИОННОЕ УСТРОЙСТВО
1
Изобретение относится к робототехнике и может быть использовано при создании универсальных копирующих манипуляторов и промышленных роботов.
Известно манипуляционное устройство, содержащее приводной блок с силовыми элементами, механическую руку, состоящую), например, из плечевого, локтевого и кистевого суставов, выполненных каждый в виде верхнего и нижнего корпусов, и механического дифференциала, а также кинематические цепи связи суставов с силовыми элементами приводного блока I.
Недостатками известного устройства являются низкая точность позиционирования, обусловленная наличием зазоров в передачах механических дифференциалов, и ограниченная грузоподъемность.
Цель изобретения - повышение точности позиционирования и грузоподъемности.
Цель достигается т/ем, что в манипуляционном устройстве кинематическая цепь привода каждого сустава выполнена в виде двух кинематических ветвей, замкнутых на нижний корпус соответствующего сустава, при этом расположение сателлитов дифференциалов плечевого сустава в кинематической цепи привода кистевого сустава симметрично относительно продольной оси руки расположению сателлитов дифференциалов локтевого и кистевого суставов в этой цепи, а расположение сателлитов дифференциалов плечевого и локтевого суставов в кинематической цепи привода локтевого сустава аналогично, и в каждой кинематической ветви сателлиты расположены также симметрично.
В кинематических цепях привода суставов имеются упругие элементы, а верхний и нижний корпусы кистевого сустава связаны упругими элементами, например пружинами.
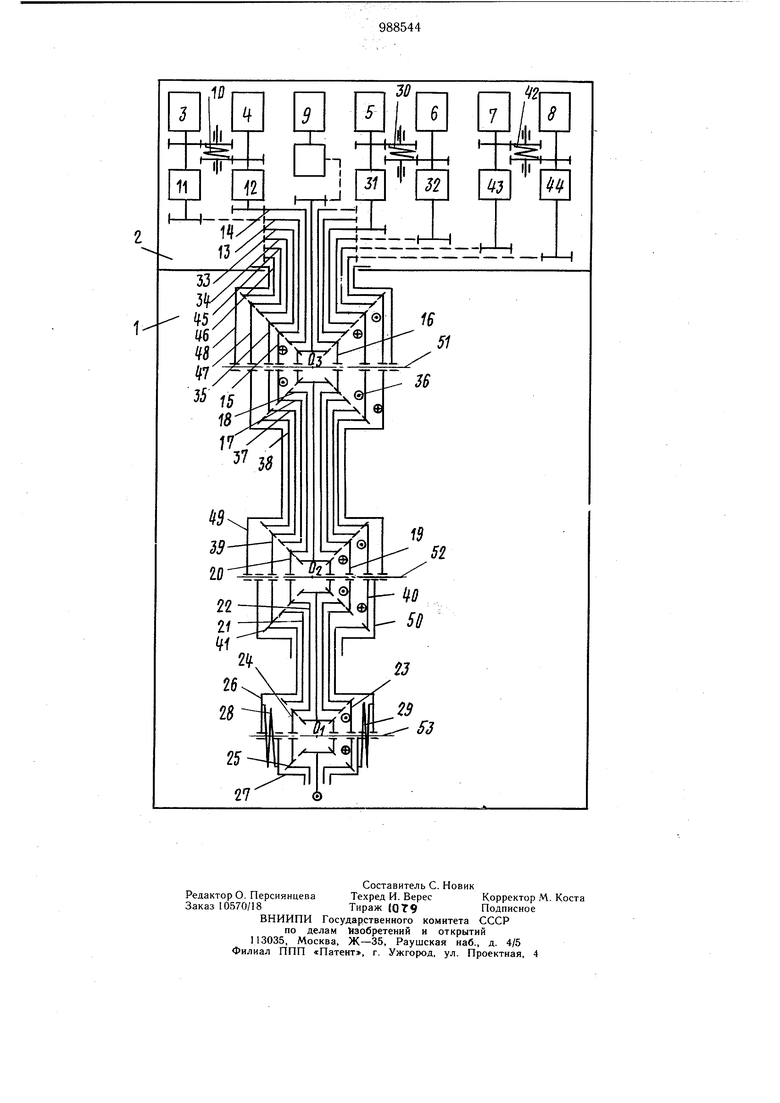
На чертеже изображена кинематическая 15 схема манйпуляционного устройства.
Манипуляционное устройство содержит механическую руку 1 с плечевым, локтевым и кистевым суставами, имеющими дифференциалы с сателлитами, приводной блок 2 с силовыми элементами 3-9. Силовые элемен ° ты 3 и 4 кинематически связаны друг с другом посредством зубчатых колес и пружины 10, а также через редукторы 11 и 12, кинематические элементы 13 и 14, сателлиты 15 и 16 дифференциалов плечевого суетава, элементы 17 и 18, сателлиты 19 и 20 дифференциалов, элементы 21 и 22 и сателлиты 23 и 24 дифференциалов кистевого сустава - с зубчатым колесом 25. Корпусы 26 и 27 кистеворо сустава взаимно связаны посредством пружин 28 и 29. Сателлиты 16, 19 и 23 расположены справа от центров О,, Oj суставов, а сателлиты 15, 20 и 24 - слева от этих центров. Силовые элементы 5 и 6 аналогично кинематически связаны посредством зубчатых колес и пружины 30, а также через редукторы 31 и 32, элементы 33 и 34, сателлиты 35 и 36 дифференциала плечевого сустава, элементы 37 и 38, сателлиты 39 и 40 дифференциала локтевого сустава - с общим зубчатым колесом 41. Сателлиты 36 и 40 расположены справа от центров суставов, а сателлиты 35 и 39 - слева. Силовые элементы 7 и 8 имеют взаимосвязь через зубчатые колеса и пружину 42, а также через редукторы 43 и 44 и элементы 45 и 46 - с нижним корпусом 47 плечевого сустава. Корпусы 47, 48 и 49, 50, а также корпусы 26 и 27 шарнирно связаны горизонтальными осями 51, 52 и 53 и имеют возможность поворачиваться относительно этих осей. Силовой элемент 9 связан кинематической цепью со схватом устройства (на чертеже не показан).
Манипуляциойное устройство работает следующим образом.
Если элементы 45 и 46 плечевого сустава повернутся на одинаковый угол в одном и том же направлении то это вызовет поворот механической руки в плечевом-суставе относительно вертикальной оси. Если элементы 45 и 46 повернутся на одинаковьш угол в разных направлениях, то это вызовет поворот корпуса 47 относительно горизонтальной оси 51 сустава (изгиб в плечевом суставе). Аналогично работают все остальные суставы.
Для повыщения точности позиционирования зазоры в зубчатых зацеплениях кинематических цепей убираются при помощи натяга, создаваемого в кинематических цепях пружинами 10, 28, 29 и 42.
Пружина 10 создает изгибающие моменты во всех- суставах. В кистевом суставе этому изгибающему моменту противодействуют силы пружин 28 и 29, при этом зазоры в кинематических цепях, кистевого сустава полностью ликвидируются. Пружины 30 и 42 создают изгибающие моменты соответственно в локтевом и плечевом суставах и ликвидируют зазоры в соответствующих кинематических цепях, при этом направления и величины сил, развиваемых пружинами 10, 30 и 42, выбираются таким образом, чтобы сумма изгибающих моментов, создаваемых пружинами в локтевом и в плечевом суставах, равнялась нулю.
Соответствующая оптимизация кинематических цепей манипуляционного устройства с воспроизведением кинематической схемы предлагаемого устройства позволяет увеличить точность позиционирования, грузоподъемность и тем самым производительность.
Увеличение точности позиционирования при ликвидации зазоров в зацеплениях позволяет использовать предлагаемое манипуляционное устройство не только для копирующих манипуляторов, но и для промышленных роботов, производительность которых выще производительности копирующих манипуляторов. Одновременно может быть сокращено число операторов за счет автоматизации типовых процессов манипулирования.
Формула изобретения
1.Манипуляционное устройство, содержащее приводной блок с силовыми элементами, механическую руку, состоящую, например, из плечевого, локтевого и кистевого суставов, выполненных каждый в виде верхнего и нижнего корпусов, и механического дифференциала, а также кинематические цепи связи суставов с силовыми элементами приводного блока, отличающееся тем, что, с целью повышения точности позиционирования и грузоподъемности, кинематическая цепь привода каждого сустава выполнена в виде двух кинематических ветвей, замкнутых на нижний корпус соответствующего сустава, при этом расположение сателлитов дифференциалов плечевого сустава в кинематической цепи привода кистевого сустава симметрично относительно продольной оси руки расположению сателлитов дифференциалов локтевого и кистевого суставов в этой цепи, а расположение сателлитов дифференциалов плечевого и локтевого суставов в кинематической цепи привода локтевого сустава аналогично, и в каждой кинематической ветви сателлиты расположены также симметрично.
2.Устройство по п. 1, отличающееся тем, что в кинематических цепях привода суставов имеются упругие элементы, а верхний и нижний корпусы кистевого сустава связаны упругими элементами, например пружинами.
Источники информации, принятые во внимание при экспертизе 1. Манипуляторы. Каталог-справочник. Л., 1968, с. 93-95.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1013260A1 |
| Манипулятор | 1984 |
|
SU1240581A2 |
| Механическая рука | 1983 |
|
SU1090545A1 |
| Манипулятор | 1979 |
|
SU831615A1 |
| Манипулятор | 1980 |
|
SU891425A1 |
| Манипуляционное устройство | 1983 |
|
SU1122500A1 |
| Рука манипулятора | 1983 |
|
SU1117204A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Привод захвата манипулятора | 1978 |
|
SU674891A1 |
| Манипулятор | 1979 |
|
SU772839A1 |