00
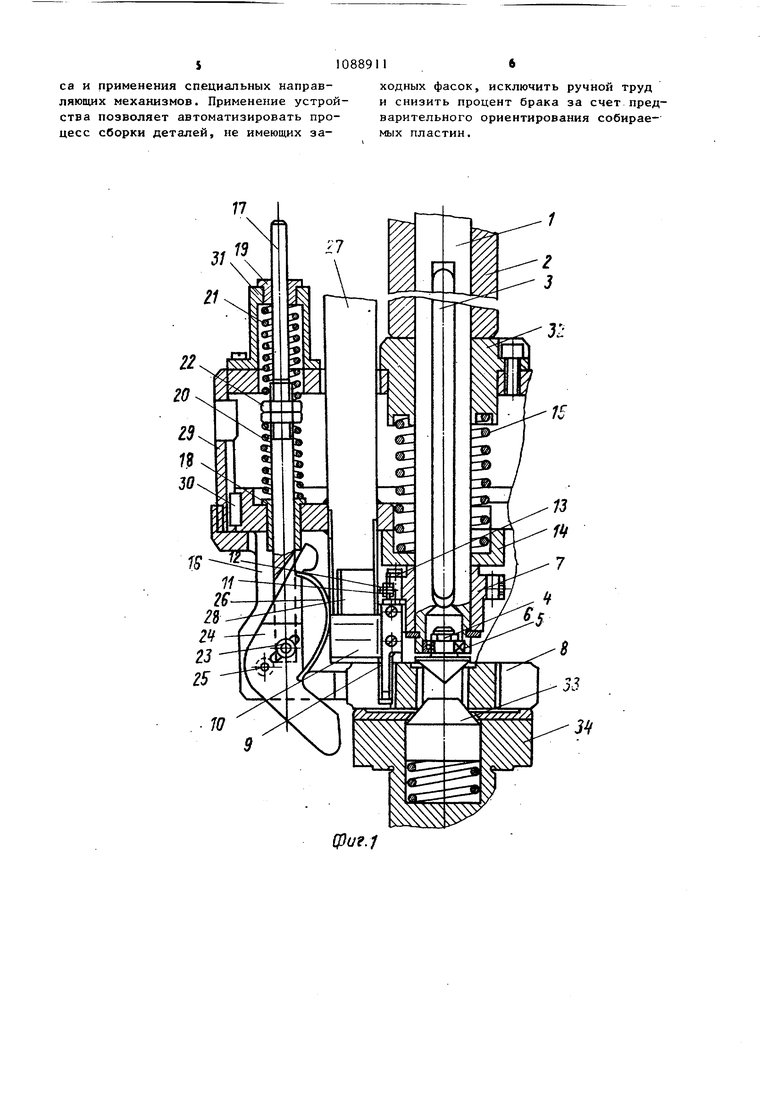
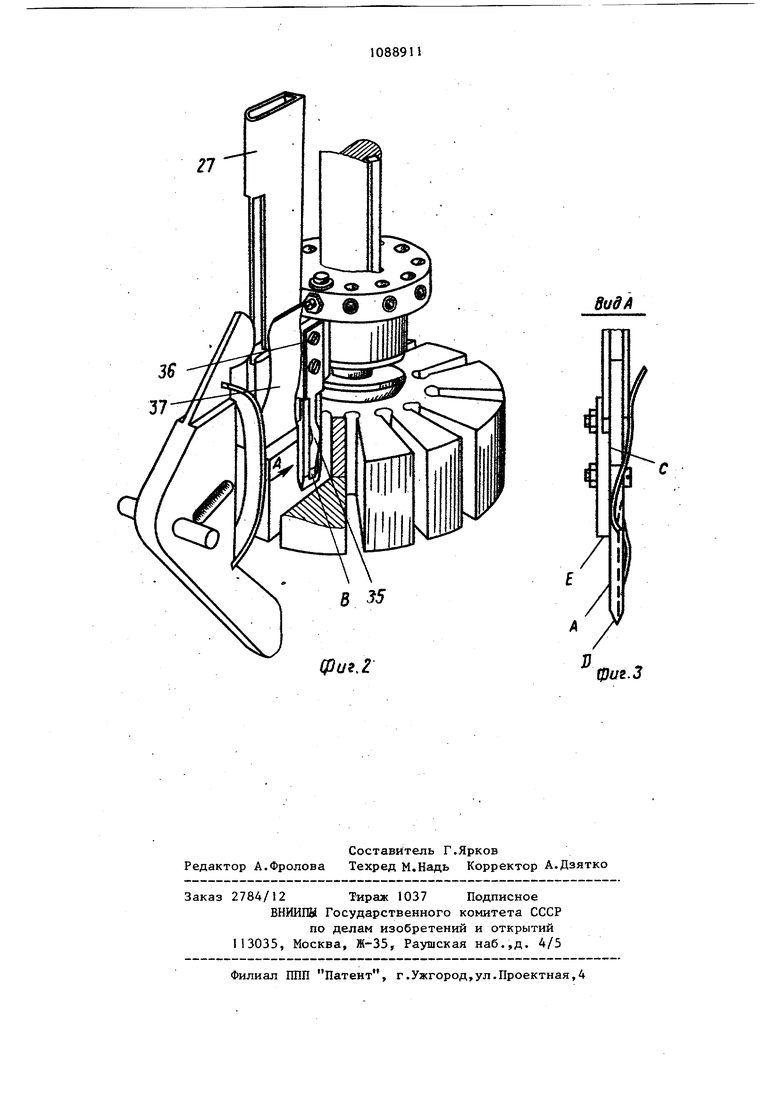
оо ;о I1 Изобретение относится к машиностроению и может быть использовано для автоматизации технологических процессов и одновременной сборки комплекта соединений типа пластинапаз. Рекомендуется использовать, его в комплексных автоматических сборочных линиях, в том числе роботизированных. Известно устройство для автоматической сборки пластин с пазами, кото рое позволяет собирать пазовые соеди нения последовательно при дискретном повороте базовой детали от привода. Оно состоит из корпуса, на котором располагается втулка на подшипниках с установленным на ней челноком-пита телем, через который толкателем подаются пластины в зону сборки. Поворот челнока ограничен упором и пружиной. Втулка связана через рычаг с электромагнитом, при помощи которо го создаются поисковые движения во круг оси втулки. Базовая деталь закреплена на валу, установленном на опорах с возможностью дискретного поворота. Самоориентахщя и соединение деталей происходит засчет сборо чного усилия. Данное устройство не нашло применения из-за низких производительности и надежности, вызванных последовательной установкой пластин и отсутствием механизма направления пластин, что приводит к значительному количеству отказов за счет погреш ностей расположения пазов и направля ющей, углового деления и закрепления базовой детали. Цель изобретения - повьшение прои зводительности и надежности процесса сборки пазовых соединений. Указанная цель достигается , что устройство для сборки бесфасочны пазовых соединений, содержащее приво ды, питатели и досьшатели, снабжено центрирующим механизмом, кинематически связанным с приводом и выполненным в виде центрирующего стержня, р положенной на нем подпружиненной вту ки, имеющей направляющие механизмы, и диска, в котором расположены питатели и досылатели, причем досьшатели выполнены каждый в виде двуплечего рычага с пружиной, расположенной между плечами рычага. На фиг.1 изображено устройство, общий вид; на фиг. 2 - направляющий механизм; на фиг.З - вид А на фиг.2 ,2 Устройство состоит из центрирующего стержня I, подвижного в вертикальном направлении, связанного с приводом 2 вертикального перемещения от пневмоцилиндра, снабженного щпонкой 3; закрепленного на нижнем конце центрирующего стержня центрирующего конуса 4, имеющего возможность поворота относительно оси центрирующего стержня на подшипнике 5; шайбы 6, на которую опирается втулка 7, имеющая отверстия, число и расположение которых соответствует числу и расположению пазов базовой детали 8, в которых располагаются хвостовики базирующих пальцев 9 направляющих механизмов 10, имеющих возможность поворота относительно осей отверстий в пределах зазора между лыской хвост товика базирую цих пальцев и торцами винтов I1, зафиксированных гайками 12; в осевом направлении базирующие пальцы зафиксированы стопорными коль цами 13. На втулку опирается стакан 14, являющийся опорой нижнего конца пружины 15. На стакан опирается диск 16,в котором установлены толкатели 17,имеющие возможность вертикально перемещаться во втулках 18 и 19 отно сительно диска под действием наборов пружин 20 и 21, регулируемых гайкой 22. Толкатели связаны через шарнир 23 с досьшателями 24, располо женными в пазах диска на осях 25 с возможностью возвратно-качательного движения. Досылатели выполнены по ширине пазов базовой собираемой дета ли и снабжены ленточной пружиной 26. На диске неподвижно закреплены питатели 27, выполненные в виде труб с внутренним отверстием , подобным форме поперечного сечения собираемых пластин 28, причем в боковых стенках питателей имеются прорези со стороны досылателей. Диск опирается на нижний уступ кожуха 29, снабженный шпоночным пазом, в Котором находится шпонка 30, закрепленная в диске. В верхней части кожуха закреплены cTaKaiflM 31, в которых располагаются хвостовики толкателей. Кожух неподвижно соединен с опорой 32 скольжения, подвижной относительно центрирующего стержня. Опора скольжения является также опорой для верх него конца пружины 15, служащей для создания силового замыкания диска с кожухом. С опорой скольжения контактирует привод вертикального пере31мещен я кожуха. Базовая собираемая деталь сцентрирована на подпружиненном коническом пальце 33, расположен ном на рабочем столе 34. Направляющий механизм состоит из базирующего пальца, выполненного по ширине меньше ширины паза в базовой собираемой детали, причем на стороне, противоположной его базовой поверхности А,выполнена продольная канавка В,в которой расположен нижний конец изогнуто пружины 35, которая закреплена винтами 36 на верхнем конце базирующего пальца. Винты обеспечивают жесткое закрепление изогнутой и ограничивакяцей пружин 37, а также рабочей направляющей поверхности С направляющего механизма к базирующему пальцу так, что базовая поверхность базирующего пальца совмещена с рабочей поверхностью направляющей. Ограничивающая пружина изогнута таким образом, что нижний ее конец прижат к рабочей поверхности направляющей, а верхний конец отогнут от этой поверхности так, что обеспечивает свободный вход питателя между ними. Устройство работает следующим образом. Рука робота ставит на рабочий сто базовую ориентированную в угловом положении собираемую деталь, которая предварительно устанавливается по оси сборочного устройства с помощью подпружиненного конического пальца входящего в центральное отверстие базовой собираемой,детали 8. Далее схват робота разжимается и рука робо та отводится. Включается привод осев го перемещения центрирующего стержня 1, который, перемещаясь вниз, оконча тельно центрирует и зажимает базовую собираемую деталь 8 на рабочем столе ЗА. При этом кожух 29 устройства вместе с диском 16 скользит по центр рующему стержню 1 вниз и концЫ базир ющих пальцев 9, имеющие заострения Д, проваливаются под действием веса подвижной части устройства в пазы базовой собираемой детали 8, а нижние концы Е направляющих поверхностей упираются в верхнюю поверхность базовой собираемой детали 8. При этом изогнутая пружина 35 обеспе чивает надежный контакт базовой поверхности А базирующего пальца 9с поверхностью паза, совмещая таким образом рабочую поверхность С направ ляющего механизма с поверхностью па1 . . 4 за базовой собираемой детали. Затем в питатели 27 автоматически подаются предварительно ориентированные , в вибробункере собираемые пластины 28, которые падают и останавливаются ограничивающими пружинами 37. Включается привод осевого перемещения кожуха 29, который начинает двигаться вниз, воздействуя на наборы пружин 20 и. 21, заставляя толкатели 17 двига ться вниз и поворачивать досылатели 24, которые входят в прорези питателей 27, воздействуют на верхние торцы собираемых пластин 28, заставляя их двигаться вниз и устанавливаться в пазах базовой собираемой детали 8. При этом ленточные пружины 26 препятствуют выпаданию пластин через пазы в питателях 27. Собираемые пластины, прижимаемые ограничивающими пружинами 37 к рабочим поверхностям С направляющих механизмов, скользят по ним и входят в пазы базовой собит раемой детали 8. Ход привода 2 осевог го перемещения кожуха 29 рассчитан таким образом, что привод отключает ся при полной установке пластин в пазы. Затем включается обратный ход привода центрирукяцего стержня 1, который поднимает диск 16 и выводит из пазов базирующие пальцы 9. Это приводит к тому, что оси 25 вращения досылателей 24 также поднимаются относительно неподвижных осей шарниров толкателей и контакт верхних плечей досылателей с базовой собираемой деталью не нарушается за счет силового воздействия наборов пружин 20 и 21 на толкатели 17. Включается обратный ход привода кожуха 29 вверх, что приводит к увеличению расстояния между диском 16 и верхней частью кожуха 29; усилие сжатия пружины 15 ослабевает, под ее действием толкатели I7 перемещаются вверх и поворачивают досылатели 24 так, что их нижние плечи досылают пластины в пазы в радиальйом направлении. Затем оба привода согласованно перемещаются вверх и тянут за собой стержень I и кожух 29 до исходного положения. Подходит рука робота, схват зажимает комплект и переносит его на следующую сборочную позицию,Цикл повторяется. Использование предлагаемого устройства позволяет повысить производительность и надежность сборки деталей за.счет одновременности процесса и применения специальных направляющих механизмов. Применение устройства позволяет автоматизировать процесс сборки деталей, не имеющих заходных фасок, исключить ручной труд и снизить процент брака за счет предварительного ориентирования собираемых пластин.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Устройство для завальцовки цилиндрических конденсаторов | 1984 |
|
SU1211818A1 |
| Устройство для запрессовки деталей типа штифтов | 1985 |
|
SU1288013A1 |
| Устройство для сборки комплектов деталей | 1972 |
|
SU443739A1 |
| Сборочный агрегат | 1979 |
|
SU872177A1 |
| Устройство для сборки узлов, содержащих цилиндрические пружины сжатия и сухари | 1980 |
|
SU994194A1 |
| СБОРКИ РЕГУЛЯТОРА НАТЯЖЕНИЯ ВЕРХНЕЙ НИТИ ШВЕЙНОЙ МАШИНЫ | 1972 |
|
SU352739A1 |
| Схват | 1984 |
|
SU1184663A1 |
| Многопозиционное захватное устройство | 1981 |
|
SU994254A1 |
| Устройство для запрессовки тонкостенных трубчатых заготовок | 1990 |
|
SU1750915A1 |
УСТРОЙСТВО ДЛЯ СБОРКИ БЕСФАСОЧНЫХ ПАЗОВЫХ СОЕДИНЕНИЙ, содержащее приводы, питатели и досыпатели,. отличающееся тем, что, с целью повьшения производительности и надежности сборки, оно снабжено центрирующим механизмом, кинематически связанным с приводом и выполненным в виде центрирующего стержня, расположенной на нем подпружиненной втулки, имеющей направляюпда е механизмы, и диска, в котором расположены питатели и досылатели, причем до.сылатели выполнены каждый в виде двуплечего рычага с пружиной, расположенной между плечами рычага.
ВидА
| КВахрин Л.А | |||
| Исследование и разработка методов проектирования средств автоматической сборки соединений деталей с пазовыми сопряжениями | |||
| Дне.на соиск | |||
| учен, степени канд | |||
| техн | |||
| наук | |||
| М., МВТУ им | |||
| Н.Э.Баумана, 1979, с.105-108 (прототип). |
