Изобретение относится к измерительной технике, а именно к средствам измерения частот и уровней вибраций гиромоторов (ГМ), устанавливаемых в электромеханических датчиках угловой скорости (ДУС).
Известна установка (аналог), описанная в [1], содержащая подвес, технологическую камеру для гиромотора, средство измерения и обработки выходного сигнала с измерителя характеристик угловых вибраций, выполненного в виде магнитоэлектрического датчика, обмотки которого соединены через измерительный усилитель со средствами измерения сигнала и закреплены на корпусе устройства в поле магнитов, установленных на подвесе.
Указанная установка имеет следующие недостатки:
1. Прямое измерение напряжения с выхода измерительного усилителя в отсутствии компенсирующей обратной связи не обеспечивает высокую точность контроля интенсивности (ряда амплитуд) вибрационного момента вокруг оси подвеса при нестабильных масштабных коэффициентах установки на фиксированных частотах.
2. Упругий подвес на металлических струнах не обеспечивает постоянство ориентации оси подвеса и, следовательно, зазора в датчике, влияющем на стабильность масштабного коэффициента установки на фиксированных частотах.
3. Масштабирование установки с использованием эталонного гиромотора и ряда частот однофазного напряжения питания достаточно трудоемкий технологический процесс.
За прототип принят стенд, изображенный на фиг. 1 и описанный в [2]. Стенд для измерения вибрационных реактивных моментов ГМ (фиг. 1) содержит подвес, камеру, обеспечивающую закрепление гиромотора либо экваториальной либо полярной осями вдоль оси подвеса, измерительный усилитель, первый магнитоэлектрический датчик, обмотка которого соединена через измерительный усилитель со средством измерения и обработки выходных сигналов и закреплена на корпусе стенда в поле магнита, установленного на оси подвеса, второй магнитоэлектрический датчик, установленный соосно с первым датчиком и аналогично ему (обмотка второго датчика закреплена на корпусе стенда, а магнит закреплен на подвесе), усилитель мощности, выходом соединенный с обмоткой второго датчика, а входом соединенный с выходом измерительного усилителя, токоподводы с возможностью изменения коэффициента жесткости, при этом подвес выполнен в виде вала, соединенного с камерой и установленного в подшипниках корпуса стенда, а противоположные концы токоподводов через контактные платы соединены с камерой и корпусом.
Стенд, представленный на фиг. 1, при наличии компенсирующей обратной связи имеет одно значение масштабного коэффициента на любой фиксированной частоте в диапазоне от нижней до верхней частот среза сигнала с измерительного усилителя или усилителя мощности.
Однако указанный стенд не позволяет обеспечить оптимальное соотношение сигнал/шум, например, на низкой частоте вибраций ГМ (при ориентации экваториальной оси ротора ГМ вдоль оси подвеса, соответствующем положению ГМ в ДУС), на которой допустимый вибрационный момент (амплитуда сигнала с измерительного усилителя) существенно меньше, чем на высокой частоте вибраций ГМ.
Предлагается увеличить амплитуду сигнала на фиксированной (отдельной) частоте и тем самым повысить точность контроля вибраций на частотах с меньшей амплитудой вибрационного момента ГМ.
Задачей изобретения является повышение точности контроля вибраций ГМ, в диапазоне частот менее полосы пропускания выходного сигнала ДУС, за счет обеспечения оптимального соотношения сигнал/шум путем усиления/подавления отдельных гармоник с измерителя вибраций ГМ.
Технический результат достигается тем, что в стенд, содержащий подвес, камеру с возможностью закрепления гиромотора экваториальной либо полярной осями вдоль вертикальной оси подвеса, первый и второй магнитоэлектрические датчики, установленные соосно в корпусе стенда, измерительный усилитель, усилитель мощности, нагрузкой которого является обмотка второго датчика, и токоподводы, противоположные концы которых через контактные платы соединены с камерой и корпусом, при этом обмотка первого датчика соединена через измерительный усилитель со средством измерения сигнала, подвес соединен с камерой и установлен в подшипниках корпуса, токоподводы выполнены в виде пружин с возможностью изменения коэффициента жесткости, согласно изобретению вводится узкополосный фильтр, выходом соединенный с входом усилителя мощности, а входом соединенный с выходом измерительного усилителя, при этом фильтр обеспечивает усиление либо подавление отдельной гармоники сигнала с выхода измерительного усилителя.
Узкополосный фильтр практически не приводит к потере устойчивости стенда и улучшает соотношение полезный сигнал/шум. При этом частотные свойства фильтра описываются передаточной функцией

где Kдоп - коэффициент усиления либо ослабления фильтром отдельной гармоники в сигнале Uf с выхода измерительного усилителя частотой 
При Kдоп<1 отдельная гармоника сигнала Uf усиливается, а при Kдоп>1 - ослабляется, при этом масштабный коэффициент, соответственно, уменьшается в 1/Kдоп раз либо увеличивается в Kдоп раз и определяется отношением вибрационного момента к сигналу Uf на входе фильтра.
На фиг. 2 представлена функциональная схема предлагаемого стенда, при ориентации ротора ГМ экваториальной осью вдоль оси подвеса, содержащая гиромотор 1, камеру 2, вал подвеса 3, подшипники 4, магниты (5 и 7) и обмотки (6 и 8), соответственно, первого и второго магнитоэлектрических датчиков, корпус 9, контактные платы 10, пружины 11 (токоподводы с регулируемой угловой жесткостью), измерительный усилитель 12, усилитель мощности 13, узкополосный фильтр 14, средство измерения и обработки выходного сигнала (ПЭВМ 15 и аналого-цифровой преобразователь 16 через который подается в ПЭВМ сигнал с измерительного усилителя 12), при этом питание ГМ осуществляется от источника в виде процессорного модуля на базе ADUC 7026 (на фиг. 2 не показан). Первый датчик связан через последовательно соединенные измерительный усилитель, узкополосный фильтр и усилитель мощности со вторым датчиком. При этом выход усилителя мощности соединен с обмоткой второго датчика по схеме стабилизатора тока, а второй вход усилителя мощности соединен с генератором синусоидального напряжения 17 (не включен в состав стенда).
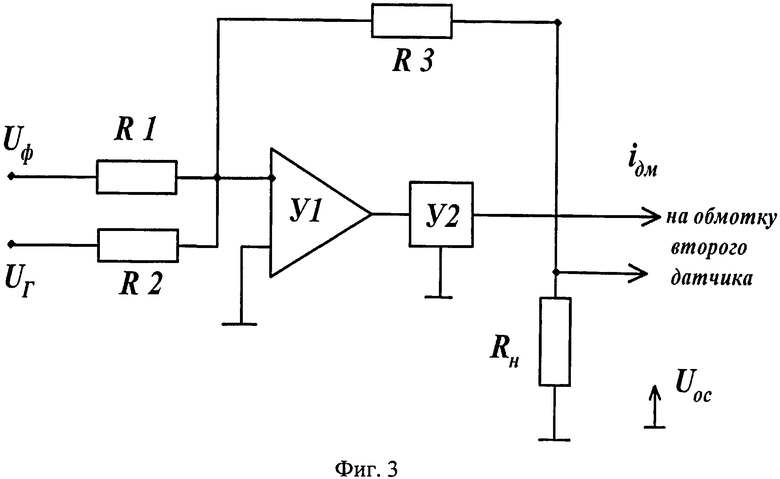
На фиг. 3 приведена схема (в частном случае) усилителя мощности, соединенного выходом с выводами обмотки второго датчика и содержащего усилитель У1, соединенный инвертирующим входом через резистор R1 с выходом узкополосного фильтра, а через резистор R2 с выходом генератора синусоидального напряжения. Выход усилителя У1 через усилитель У2 (эмиттерный повторитель по схеме Дарлингтона) соединен с началом обмотки второго датчика, конец которой соединен через эталонный резистор Rн с общей шиной, а также через резистор R3 с инвертирующим входом усилителя У1. Ток iдм через обмотку второго датчика и напряжение Uoc (выходной сигнал стенда) на резисторе RH определяются по формулам:
 ;
; 
где Rн<(R1 и R3), R3 - регулировочный резистор, Uг - сигнал имитации вибрационного момента, Uф - напряжение с выхода фильтра.
Для реализации цифрового узкополосного фильтра предполагается использовать мощный процессор со встроенным быстродействующим аналого-цифровым преобразователем (АЦП) на входе и ЦАП на выходе фильтра. При этом на выходе фильтра формируется сигнал Uф на k-м шаге дискретизации h по алгоритму вида:
 ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  .
.
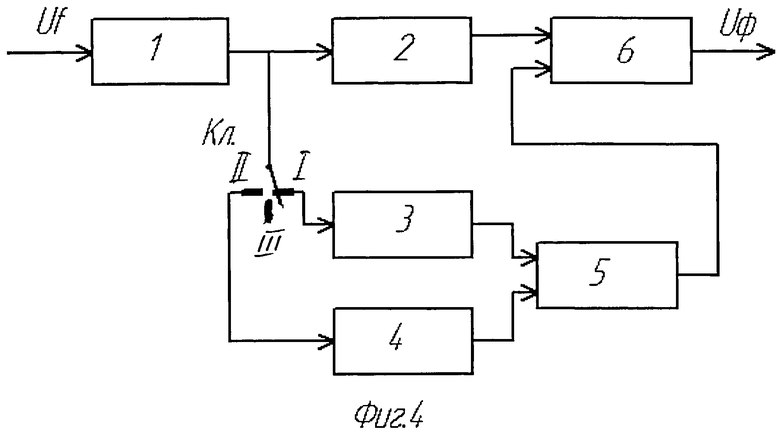
На фиг. 4 приведена структурная схема узкополосного фильтра, при реализации на аналоговых элементах. Схема содержит последовательно соединенные первый инвертирующий усилитель (1), первый неинвертирующий усилитель (2) и инвертирующий суммирующий усилитель (6), второй инвертирующий усилитель (3), второй неинвертирующий усилитель (4), инвертирующий полосовой усилитель (5) и коммутатор (Кл); суммирующий усилитель первым входом соединен с выходом первого неинвертирующего усилителя, а вторым входом - с выходом полосового усилителя, который первым входом соединен с выходом второго инвертирующего усилителя, а вторым входом - с выходом второго неинвертирующего усилителя, второй инвертирующий усилитель входом связан с первым выходом коммутатора, второй неинвертирующий усилитель входом соединен со вторым выходом коммутатора, выход первого инвертирующего усилителя соединен с входом коммутатора, при этом вход первого инвертирующего усилителя является входом фильтра, выход инвертирующего суммирующего усилителя является выходом фильтра.
Технологичнее каждый из усилителей 2 и 4 выполнить в виде двух последовательно соединенных инвертирующих усилителей. Управление коммутатором производится в ручном или автоматическом режиме. Передаточные функции фильтра и полосового усилителя имеют вид:
 ,
,
 , если Кл - в положении I
, если Кл - в положении I
 , если Кл - в положении II
, если Кл - в положении II
K1 - коэффициент передачи первого инвертирующего усилителя (1),
K2 - коэффициент передачи первого неинвертирующего усилителя (2),
K3 - коэффициент передачи второго инвертирующего усилителя (3),
K4 - коэффициент передачи второго неинвертирующего усилителя (4),
 - коэффициент передачи по первому входу инвертирующего суммирующего усилителя (6),
- коэффициент передачи по первому входу инвертирующего суммирующего усилителя (6),
 - коэффициент передачи по второму входу инвертирующего суммирующего усилителя (6),
- коэффициент передачи по второму входу инвертирующего суммирующего усилителя (6),
А - коэффициент усиления полосового усилителя на резонансной (фиксированной) частоте 
Коэффициент передачи фильтра на отдельной частоте определяется по формуле:  .
.
Если Кл в положении I 


Если Кл в положении II 

Сигнал Uf по моменту Mf (на резонансной частоте фильтра в составе стенда) увеличивается в 
Если Кл в положении III 

Таким образом, представляется возможным узкополосным фильтром улучшать соотношение сигнал/шум путем увеличения амплитуды полезного сигнала, если Кл в положении II

При этом масштабный коэффициент стенда, соответственно, увеличивается
Изменение масштабного коэффициента стенда в Kдоп раз на фиксированной (отдельной) частоте контролируется по отношению сигнала имитации Uг к сигналу Uf на резонансной частоте фильтра.
Сущность формирования в стенде оптимального соотношения сигнал/шум на отдельной частоте с выхода измерительного усилителя состоит в следующем:
Предлагаемый стенд относится к замкнутым системам автоматического регулирования, управляющее воздействие Мдм (момент второго датчика) в частотном диапазоне от нижней до верхней частоты среза практически соответствует моменту Mf. При этом выполняется условие: Mf-Мдм=0, где Мдм определяется по формуле: Mдм=Kдм·iдм.
При воздействии угловых вибраций ГМ или при имитации вибрационного момента (при выключенном ГМ) амплитудно-частотную характеристику «сигнал Uf - момент Mf» или «сигнал Uf - сигнал Uг» можно определить из передаточных функций 



Здесь W1(s)÷W6(s) - передаточные функции соответствующих звеньев: подвижная часть стенда (гиромотор, ось подвеса и магниты датчиков) первый датчик - измерительный усилитель - узкополосный фильтр - усилитель мощности - второй датчик.
В достаточно широком диапазоне частот (не менее полосы пропускания выходного сигнала стенда) усилитель мощности и второй магнитно-электрический датчик, описываемый передаточными функциями W5(s) и W6(s), практически безынерционные.
Передаточная функция W4(s) узкополосного фильтра аналогична передаточной функции (*).
Частотные характеристики стенда, соответствующие передаточным функциям

На резонансной (отдельной) частоте коэффициент передачи фильтра изменяется, а амплитудно-частотные характеристики стенда «сигнал Uf - момент Mf» или «сигнал Uf - сигнал Uг» имеют всплеск (если Kдоп<1), либо провал (если Kдоп>1). Тем самым, имеем увеличение либо уменьшение отдельной гармоники сигнала Uf, и, соответственно, уменьшение в 1/Kдоп раз либо увеличение в Kдоп раз масштабного коэффициента.
Контролировать частотную характеристику сигнала Uf и тем самым масштабный коэффициент стенда на резонансной частоте можно путем подачи с генератора сигнала имитации вибрационного момента на второй вход усилителя мощности при выключенном ГМ.
Допустимое значение вибрационного момента 
 , где A(2πf) - значения АЧХ датчика угловой скорости (уменьшается на частотах более полосы пропускания ДУС); Н - кинетический момент;
, где A(2πf) - значения АЧХ датчика угловой скорости (уменьшается на частотах более полосы пропускания ДУС); Н - кинетический момент; 
Из выражения (**) следует, что момент 
Таким образом, заявлен стенд для измерения вибрационных реактивных моментов гиромотора, содержащий подвес, камеру с возможностью закрепления гиромотора экваториальной либо полярной осями вдоль вертикальной оси подвеса, первый и второй магнитоэлектрические датчики, установленные соосно в корпусе стенда, измерительный усилитель, усилитель мощности, нагрузкой которого является обмотка второго датчика, и токоподводы, противоположные концы которых через контактные платы соединены с камерой и корпусом, при этом обмотка первого датчика соединена через измерительный усилитель со средством измерения сигнала, подвес соединен с камерой и установлен в подшипниках корпуса, токоподводы выполнены в виде пружин с возможностью изменения коэффициента жесткости. Отличительная особенность стенда состоит в том, что введен узкополосный фильтр, входом соединенный с выходом измерительного усилителя, а выходом - с входом усилителя мощности, при этом фильтр содержит последовательно соединенные первый инвертирующий усилитель, первый неинвертирующий усилитель и инвертирующий суммирующий усилитель, второй инвертирующий усилитель, второй неинвертирующий усилитель, инвертирующий полосовой усилитель и коммутатор; суммирующий усилитель первым входом соединен с выходом первого неинвертирующего усилителя, а вторым входом - с выходом полосового усилителя, который первым входом соединен с выходом второго инвертирующего усилителя, а вторым входом - с выходом второго неинвертирующего усилителя, второй инвертирующий усилитель входом связан с первым выходом коммутатора, второй неинвертирующий усилитель входом соединен со вторым выходом коммутатора, выход первого инвертирующего усилителя соединен с входом коммутатора, при этом вход первого инвертирующего усилителя является входом фильтра, выход инвертирующего суммирующего усилителя является выходом фильтра.
Узкополосный фильтр практически не приводит к потере устойчивости стенда и улучшает соотношение полезный сигнал/шум при вибрации ГМ. Предлагается реализация УФ в аналоговом варианте (возможна реализация и в цифровом варианте с АЦП и ЦАП соответственно на входе и выходе фильтра). Каждый неинвертирующий усилитель фильтра выполнен в виде последовательного соединения двух инвертирующих усилителей.
Кроме того, в средствах измерения и обработки выходного сигнала программируется алгоритм, описывающий цепь узкополосных фильтров ряда частот вибрационных колебаний ГМ, для сравнения с результатами разложения в ряд Фурье выходных сигналов стенда.
Литература
1. RU 2427801, опубл. 27.08.2011 г.
2. Заявка №2012135406. Приоритет от 20.08.12.
3. П. Хорвиц, У. Хилл. Искусство схемотехники. Том 1. - М.: Мир, 1983.
4. Алексеенко А.Г. и др. Применение прецизионных аналоговых микросхем. - М.: Радио и связь, 1985.
5. Титце У., Шенк К. Полупроводниковая схемотехника. - М.: Мир, 1983.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИОННЫХ РЕАКТИВНЫХ МОМЕНТОВ ГИРОМОТОРА | 2012 |
|
RU2518975C2 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕННОЙ СОСТАВЛЯЮЩЕЙ ВЫХОДНОГО СИГНАЛА ЭЛЕКТРОМЕХАНИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ (ДУС) НА ЭТАПЕ ИЗГОТОВЛЕНИЯ ЕГО ГИРОМОТОРА ПО ХАРАКТЕРИСТИКАМ УГЛОВЫХ ВИБРАЦИЙ, ВОЗБУЖДАЕМЫХ ГИРОМОТОРОМ, И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2427801C2 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| ГИРОКОМПАС | 2007 |
|
RU2339910C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ НАСТРОЙКИ ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 2005 |
|
RU2288450C1 |
| Гироскопический стабилизатор с контуром управления усилием в опорах гироблока | 2022 |
|
RU2789307C1 |
Изобретение относится к измерительной технике, а именно к средствам измерения вибрационных реактивных моментов гиромоторов. Стенд содержит подвес, камеру с возможностью закрепления гиромотора экваториальной либо полярной осями вдоль вертикальной оси подвеса, первый и второй магнитоэлектрические датчики, установленные соосно в корпусе стенда, измерительный усилитель, усилитель мощности, нагрузкой которого является обмотка второго датчика, и токоподводы, противоположные концы которых через контактные платы соединены с камерой и корпусом. При этом обмотка первого датчика соединена через измерительный усилитель со средством измерения сигнала, подвес соединен с камерой и установлен в подшипниках корпуса, токоподводы выполнены в виде пружин с возможностью изменения коэффициента жесткости. Дополнительно в конструкцию введен узкополосный фильтр, выходом соединенный с входом усилителя мощности, а входом соединенный с выходом измерительного усилителя, при этом фильтр обеспечивает усиление либо подавление отдельной гармоники сигнала с выхода измерительного усилителя. Технический результат заключается в повышении точности контроля вибраций гиромотора. 4 ил. 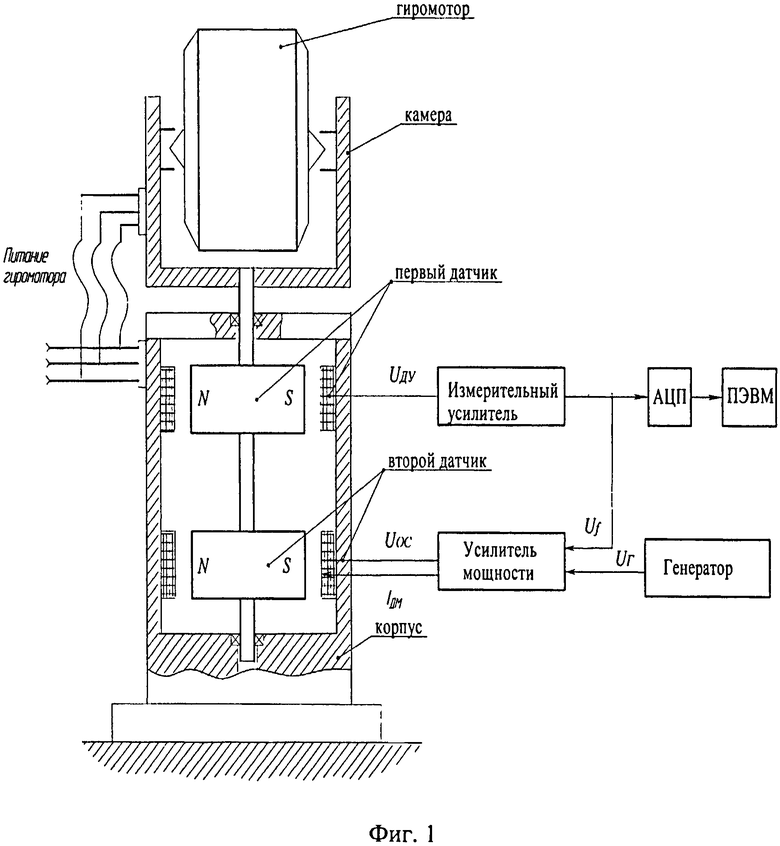
Стенд для измерения вибрационных реактивных моментов гиромотора, содержащий подвес, камеру с возможностью закрепления гиромотора экваториальной либо полярной осями вдоль вертикальной оси подвеса, первый и второй магнитоэлектрические датчики, установленные соосно в корпусе стенда, измерительный усилитель, усилитель мощности, нагрузкой которого является обмотка второго датчика, и токоподводы, противоположные концы которых через контактные платы соединены с камерой и корпусом, при этом обмотка первого датчика соединена через измерительный усилитель со средством измерения сигнала, подвес соединен с камерой и установлен в подшипниках корпуса, токоподводы выполнены в виде пружин с возможностью изменения коэффициента жесткости, отличающийся тем, что введен узкополосный фильтр, входом соединенный с выходом измерительного усилителя, а выходом - с входом усилителя мощности, при этом фильтр обеспечивает усиление либо подавление отдельной гармоники сигнала с выхода измерительного усилителя.
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕННОЙ СОСТАВЛЯЮЩЕЙ ВЫХОДНОГО СИГНАЛА ЭЛЕКТРОМЕХАНИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ (ДУС) НА ЭТАПЕ ИЗГОТОВЛЕНИЯ ЕГО ГИРОМОТОРА ПО ХАРАКТЕРИСТИКАМ УГЛОВЫХ ВИБРАЦИЙ, ВОЗБУЖДАЕМЫХ ГИРОМОТОРОМ, И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2427801C2 |
| ДОПЛЕРОВСКИЙ РАДИОВОЛНОВОЙ ИЗВЕЩАТЕЛЬ ДЛЯ ОХРАННОЙ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 2008 |
|
RU2380724C1 |
| Устройство для программирования испытаний радиоэлектронных изделий на случайную вибрацию | 1985 |
|
SU1359695A1 |

