Изобретение относится к способам определения положения груза, перемещаемого подъемным механизмом.
Известен способ измерения вылета в устройстве безопасности стрелкового грузоподъемного крана (RU 2271986 С2 от 21.06.2004), заключающийся в том, что путем преобразования результатов измерения угла наклона и длины стрелы, определяется вылет стрелкового грузоподъемного крана.
Недостатком данного способа является отсутствие возможности позиционирования груза в начальное положение, в случае начальной инициализации или возникновении сбоев в системе управления.
Из известных способов определения положения груза наиболее близким к заявленному является способ управления положением (позиционирования) груза, перемещаемого подъемным механизмом, не имеющим стационарного положения в пространстве (RU 2495815 С2 от 12.12.2011), заключающийся в измерении положения груза, формировании управляющей информации с помощью компьютера и подаче команды управления на исполнительный механизм, в котором определение пространственного положения груза осуществляют посредством позиционно-чувствительной системы, детекторы которой, жестко закрепленные на грузе, ориентируют таким образом, чтобы их оси были направлены соответственно на источники, расположенные в области предполагаемого места посадки груза, при этом груз подводят к области предполагаемого места посадки до попадания источников в поле зрения детекторов, преобразуют выходные сигналы детекторов в электрические величины, по заданному алгоритму управления формируют команды горизонтального перемещения груза, а вертикальное перемещение груза осуществляют программно, отличающийся тем, что, с целью расширения функциональных возможностей, дополнительно вводят верхний уровень управления, обеспечивающий стабилизацию положения подъемного механизма в заданной зоне работы нижнего уровня управления, за счет определения ошибок положения подъемного механизма относительно заданных границ монтажной зоны, которые отрабатывают посредством исполнительных устройств стабилизации подъемного механизма, для управления положением груза различной геометрической формы на нижнем уровне управления положение груза оценивают системой наведения, посредством радиоизотопных меток и следящих детекторов.
Недостатками данного способа являются то, что используемые источники (радиочастотные метки) подвержены помехам в виде электромагнитных полей, которые в свою очередь могут не позволить определить точное положение груза.
Задачей заявляемого способа является вывод рабочего органа с грузом в начальное положение при отсутствии сложных технических средств на основе тензометрических данных.
Поставленная задача решается следующим образом. Способ определения положения груза манипулятора параллельной структуры на основе тензометрических данных, перемещаемого подъемным механизмом, заключающийся в измерении положения груза, отличается тем, что функции позиционно-чувствительной системы выполняют датчики измерения силы реакции опоры, расположенные на четырех опорах, через которые проходят тросы, ориентируя груз таким образом, чтобы груз был расположен в центре рабочего пространства.
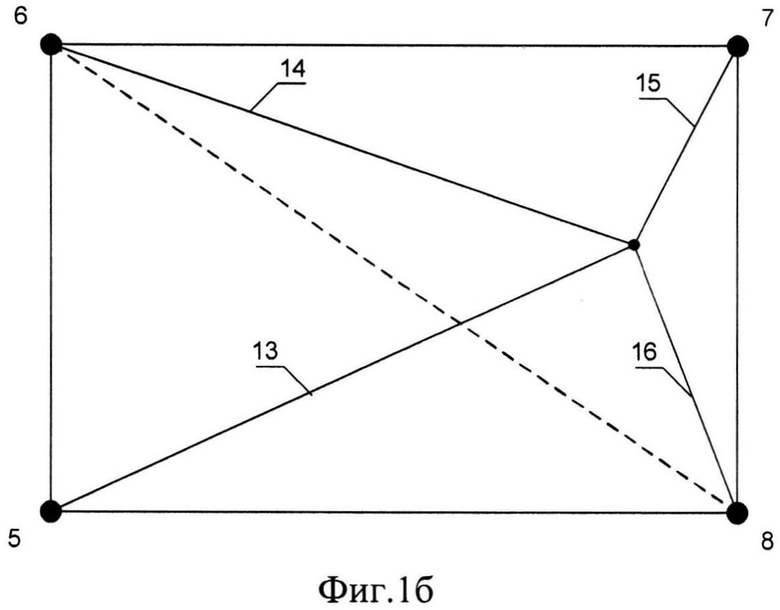
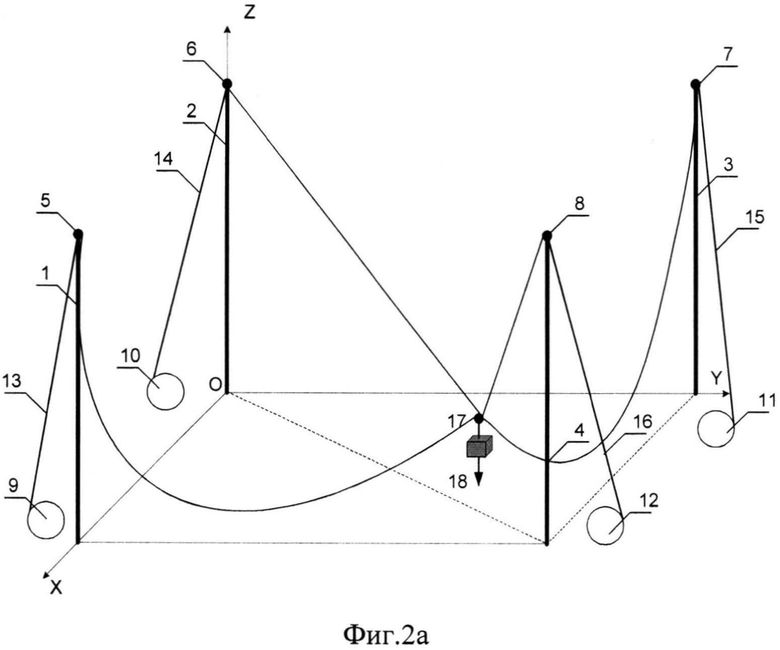
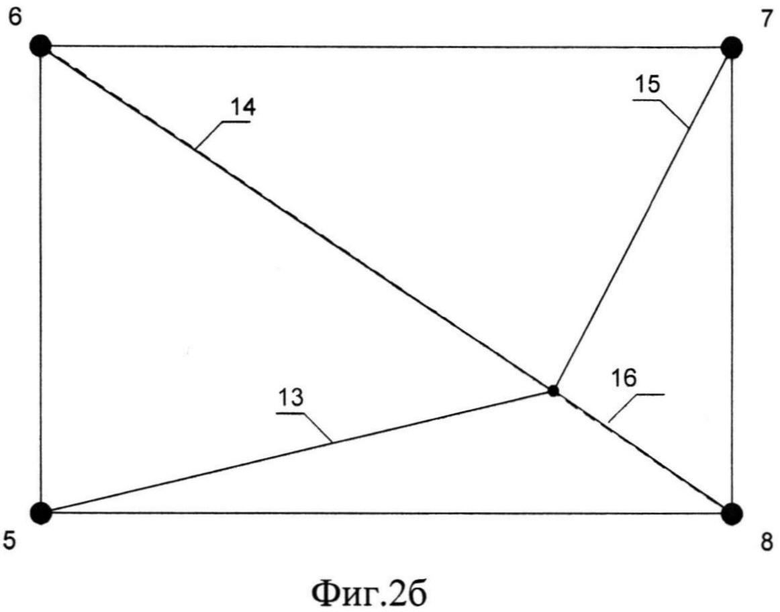
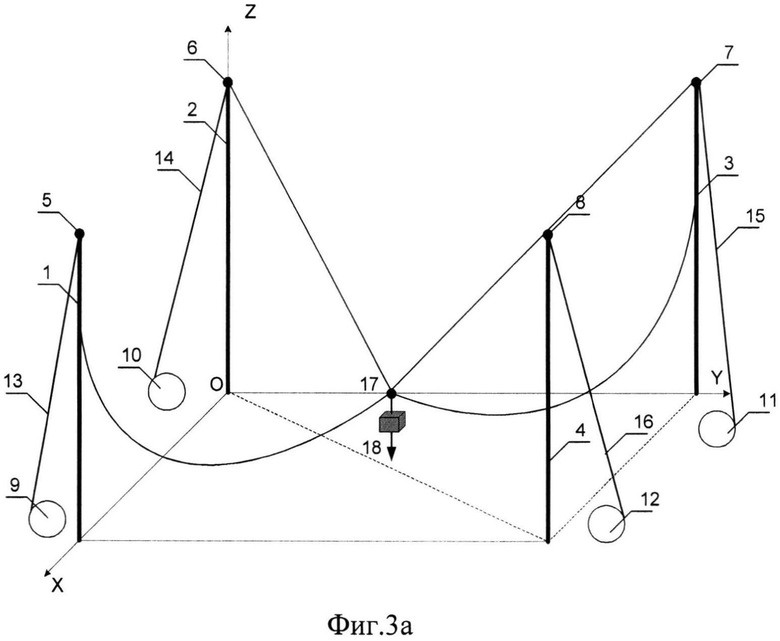
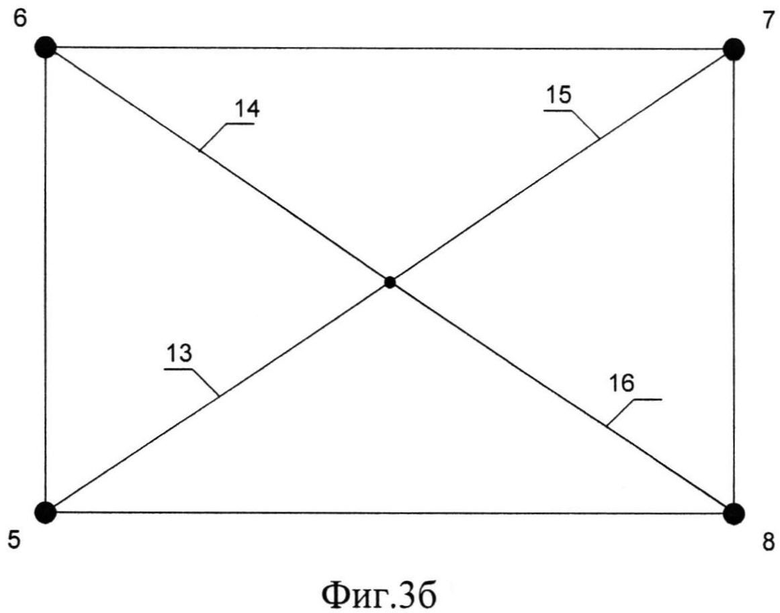
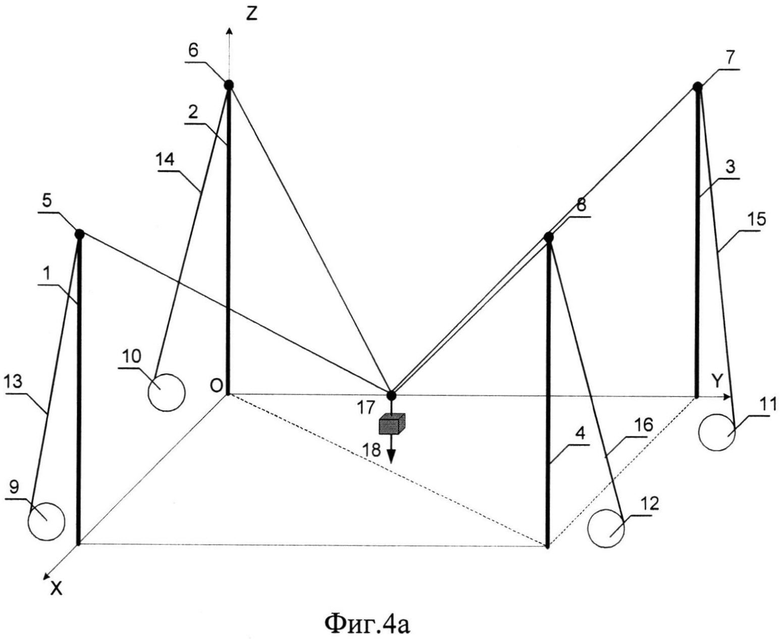
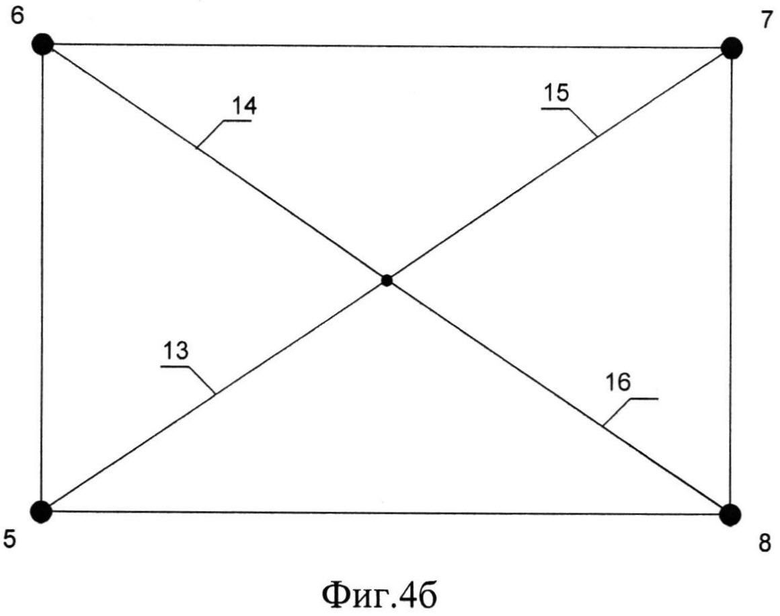
Сущность изобретения поясняется фиг. 1-4, на которых представлена структурная схема параллельного манипулятора для позиционирования груза в пространстве, где на Фиг.1а, Фиг.2а, Фиг.3а, Фиг.4а изображен общий вид манипулятора, а на Фиг.1б, Фиг.2б, Фиг.3б, Фиг.4б - вид сверху. Кинематическая структура манипулятора содержит четыре опорные башни 1, 2, 3, 4, четыре электродвигателя с устройством для укладки троса и редуктором 9, 10, 11, 12, приводимые во вращение устройством управления, четыре троса 13, 14, 15, 16, служащие для перемещения груза в пространстве, соединенные с редуктором электродвигателей через ролики с датчиками измерения силы реакции опоры 5, 6, 7, 8, расположенные на опорных башнях 1, 2, 3, 4, захватное устройство 18. При вращении электродвигателей с устройствами для укладки тросов и редукторами 9, 10, 11, 12, угловое положение валов которых задается устройством управления, происходит изменение длины тросов 13, 14, 15, 16, поддерживаемых роликами с датчиками измерения силы реакции опоры 5, 6, 7, 8, расположенными на опорных башнях 1, 2, 3, 4, в результате чего захватное устройство 18 перемещается в заданную точку пространства.
Предлагаемый способ управления положением (позиционирования) груза, перемещаемого подъемным механизмом, осуществляется следующим образом.
1. Груз находится в подвешенном состоянии, положение которого неизвестно (Фиг.1а и Фиг.1б).
2. Увеличение длин тросов 13 и 15 приведет к тому, что масса груза распределится между тросами 14 и 16 (Фиг.2а и Фиг.2б).
3. По данным датчиков силы реакции опор, расположенных на роликах 6 и 8, изменяя длину тросов 14 и 16, необходимо добиться одинаковой нагрузки на них (Фиг.3а и Фиг.3б).
4. По данным датчиков сил реакции опор 5 и 7 уменьшаем длину тросов 13 и 15 до появления в каждом из них 25% массы груза (Фиг.4а и Фиг.4б).
5. Путем увеличения длин тросов 13, 14, 15 и 16 опускаем груз на землю.
В результате чего груз находится на земле в центре рабочего пространства. Таким образом, технический результат предлагаемого способа заключается в том, чтобы при произвольном расположении груза выводить его в начальное положение при отсутствии сложных технических средств на основе тензометрических данных.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН И СПОСОБ УПРАВЛЕНИЯ ТАКИМ КРАНОМ | 2017 |
|
RU2728315C2 |
| КРАН | 2017 |
|
RU2734966C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ (ПОЗИЦИОНИРОВАНИЯ) ГРУЗА, ПЕРЕМЕЩАЕМОГО ПОДЪЕМНЫМ МЕХАНИЗМОМ, НЕ ИМЕЮЩИМ СТАЦИОНАРНОГО ПОЛОЖЕНИЯ В ПРОСТРАНСТВЕ | 2011 |
|
RU2495815C2 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2024 |
|
RU2835700C1 |
| Робототехнический комплекс укладки газобетона | 2022 |
|
RU2803337C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ШТАНГИ И БИОМЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ДВИГАТЕЛЬНЫХ ДЕЙСТВИЙ ТЯЖЕЛОАТЛЕТА | 2008 |
|
RU2403937C2 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ КРАНОМ ДЛЯ УПРАВЛЕНИЯ ПОДЪЕМНЫМ МЕХАНИЗМОМ КРАНА | 2010 |
|
RU2534694C2 |
| КРАН, А ТАКЖЕ СПОСОБ КОНТРОЛЯ ПРЕДОХРАНЕНИЯ ОТ ПЕРЕГРУЗОК ТАКОГО КРАНА | 2016 |
|
RU2722326C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМНЫМ КРАНОМ | 2012 |
|
RU2574047C2 |
Изобретение относится к области кранов и предназначено для управления положением груза при погрузочно-разгрузочных работах. Для определения начального положения груза манипулятора на основе тензометрических данных измеряют положение груза в начальном положении. Снимают нагрузку с любых двух диагональных опор путем увеличения соответствующих длин гибких связей. Путем изменения длин двух других гибких связей добиваемся одинаковой нагрузки на них. Функцию позиционно-чувствительной системы выполняют датчики измерения силы реакции опоры, расположенные на четырех опорах, через которые проходят тросы. Ориентируют груз таким образом, чтобы он был расположен в центре рабочего пространства. Достигается вывод груза в начальное положение при отсутствии сложных технических средств на основе тензометрических данных. 8 ил.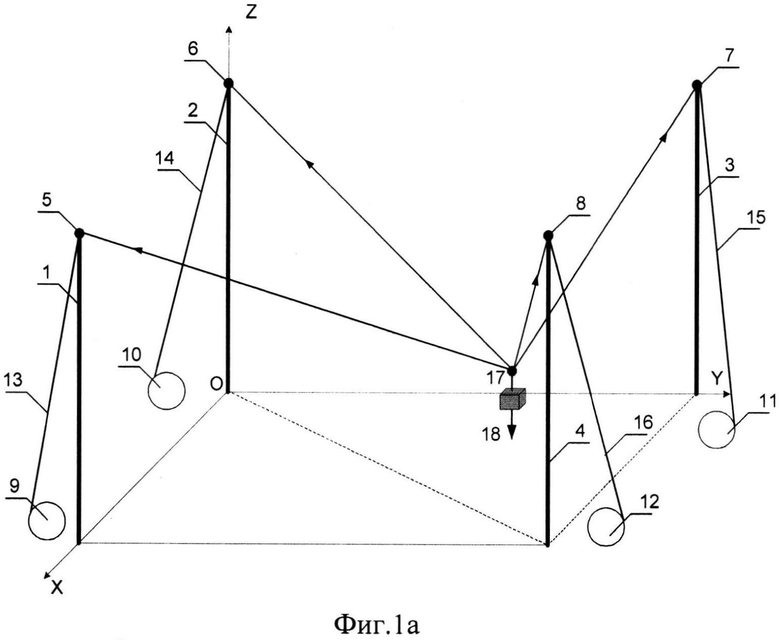
Способ определения начального положения груза манипулятора параллельной структуры на основе тензометрических данных, перемещаемого подъемным механизмом, заключающийся в измерении положения груза, отличающийся тем, что функции позиционно-чувствительной системы выполняют датчики измерения силы реакции опоры, расположенные на четырех опорах, через которые проходят тросы, ориентируя груз таким образом, чтобы груз был расположен в центре рабочего пространства.
| US 2003168647 A1, 11.09.2003 | |||
| СИСТЕМА КОНТРОЛЯ ГРУЗОВОЙ УСТОЙЧИВОСТИ МОБИЛЬНЫХ ГРУЗОПОДЪЕМНЫХ МАШИН | 2004 |
|
RU2267458C1 |
| WO 2001077571 A1, 18.10.2001 | |||
| US 6975089 B2, 13.12.2005 | |||
| US 20130087522 A1, 11.04.2013. | |||

