Изобретение относится к робототехнике и может быть использовано при создании исполнительных устройств манипуляторов. Кроме того, захват может использоваться в качестве протеза верхних конечностей инвалидов.
Известен захват манипулятора, содержащий сочлененные с ладонью пальцы, трос, соединяющий пальцы с приводом, концы троса закреплены на конечных элементах пальцев, средняя часть охватывает блок, установленный на выходном звене привода, при этом пальцы захвата выполнены в виде винтовых конических пружин сжатия, трос расположен внутри пружин со смещением относительно продольной оси в сторону внутренней поверхности (см. патент РФ №1237419, B25J 15/12).
Недостатком данного устройства является низкая надежность, обусловленная относительным движением пальцев по захватываемой детали в процессе работы. При натяжении троса пружина подвергается изгибу и сжатию. Имеет место нецентральное сжатие пружины. При этом пружина изгибается, что обеспечивает охват детали, и одновременно сжимается. Расстояние между витками уменьшается. Как следствие, имеет место относительное движение витков по поверхности детали. Результатом этого движения является нежелательное перемещение пальца по поверхности детали, уменьшается длина контакта палец - деталь, что ведет к снижению устойчивости объекта в захвате. Повышается вероятность его выхода из захвата.
Известна искусственная кисть, содержащая корпус, палец, два блока пальцев, рычажную систему, силовую пружину и управляющую гибкую тягу, закрепленную на оси корпуса втулку, силовую пружину и приводной блок, включающий стопорный кулачок, пружину, рычаг, гибкую тягу и кинематически связанный с рычажной системой пальца и первым блоком пальцев, а в дистальной части корпуса закреплен подпружиненный стопорный зуб, контактирующий с закрепленной на втором блоке пальцев планкой, причем на первом блоке пальцев размещен нажимной рычаг, воздействующий на стопорный зуб при разведенных пальцах кисти (см.ПИ РФ №2189797, A61F 2/54).
Недостатком известного решения является сложность конструкции, обусловленная значительным числом рычагов, планок, кинематических пар, соединяющих элементы привода.
Наиболее близким аналогом к заявляемому объекту является захват манипулятора, содержащий корпус, шарнирно установленные на нем пальцы, каждый из которых включает подвижные звенья, последовательно соединенные вращательными парами с параллельными осями вращения, блоки, трос, проходящий в пределах каждого звена и закрепленный одним концом на приводе, а другим - на последнем подвижном звене, пружины кручения, установленные вдоль оси вращательных пар, а блоки установлены свободно на осях вращательных пар и охватываются тросом, пружины соосны блокам, одним концом соединены с ним, а вторым - с подвижным звеном (см. ПМ РФ №115712, B25J 15/12).
Недостатком известного устройства являются значительные габариты, обусловленные тем, что звенья каждого пальца приводятся в движение от индивидуального привода. Общее число приводов составляет 5 единиц. Их размещение ведет к увеличению габаритов основания и массы всего захвата. В силу того, что основание является частью подвижной системы робота, уменьшается его грузоподъемность. Кроме того, размещение пяти приводов приводит к усложнению компоновки и конструкции в целом.
Техническая задача, на решение которой направлено изобретение, заключается в уменьшение габарита и массы захвата, упрощении конструкции.
Техническая задача решается тем, что в известном захвате, содержащем корпус, шарнирно установленные на нем пальцы, каждый из которых включает подвижные звенья, последовательно соединенные вращательными парами с параллельными осями вращения, блоки, установленные свободно и соосно осям вращательных пар, соединяющих подвижные звенья между собой, трос, закрепленный одним концом на приводе и вторым на последнем звене, проходит в пределах каждого звена и охватывает блоки в одном направлении, пружины, соединенные одним концом с блоком, а вторым с подвижным звеном, при этом жесткость каждой последующей от корпуса пружины больше предыдущей, блоки, соосные оси, соединяющей подвижные звенья с корпусом, установлены на приводном валу, связаны с ним через пружину, один конец которой соединен с блоком, а второй с приводным валом, общим для всех пальцев, у которых оси, соединяющие подвижные звенья с корпусом, сосны, при этом трос закреплен на блоке, установленном на приводном валу, а подвижное звено, сопряженное с корпусом, связанно с ним дополнительно пружиной.
Изобретение поясняется общими видами, где: на фиг. 1 представлено упрощенное изображение захвата, выполненного в соответствии с основным решением (п. 1 формулы изобретения); на фиг. 2 - объемное изображение одного пальца.
Захват содержит корпус 1 (фиг. 1), на котором установлены пальцы 2, 3, 4, 5 и 6, шарнирно соединенные с корпусом 1 через вращательные пары 7, 8, 9, 10, 11. Оси вращательных пар 7-10 соосны. Каждый палец 3-6 (например - 3) включает подвижные звенья 12, 13, 14 (фиг. 2), соединенные последовательно вращательными парами 7, 15, 16 с параллельными осями вращения. В каждой вращательной паре: 7, 15 и 16 установлены, с возможностью свободного вращения, соосно их осям, блоки соответственно: 17, 18, 19. Блоки 17, 18, 19 охватываются тросом 20 в прямом направлении со стороны направления движения. Один конец троса 20 закреплен на звене 14, второй на блоке 17, установленном на приводном валу 21. Приводной вал 21 является осью, посредством которой подвижные звенья 12, 22, 23, 24 соединяются с корпусом 1. Приводной вал 21 выполнен кинематически соединенным с силовой частью привода 25 (мотор-редуктор) и вращает блок 17 и аналогичные блоки, установленные соосно осям, соединяющим подвижные звенья с корпусом 1 во вращательных парах 8-10.
На осях вращательных пар каждого пальца (например - 3) установлены пружины 26, 27, 28. При этом один конец каждой пружины соединен с блоком, а второй с подвижным звеном: пружина 26 с блоком 18 и звеном 13, пружина 27 с блоком 19 и звеном 14. Один конец пружины 28 соединен с блок 17, а второй с приводным валом 21.
Звено 12 соединено с корпусом 1 дополнительно пружиной 29 (фиг. 2). Жесткость пружины 27 больше жесткости пружины 26, пружины 26 больше, чем жесткость пружины 29.
Жесткость пружины 29 и аналогичных, установленных во вращательных парах 8-10 одинаковы.
Пальцы 4-6 построены идентично пальцу 3. Конструкция пальца 2 аналогична по построению пальцу 3, но приводится в движение от индивидуального привода.
Захват работает следующим образом.
Звенья пальцев 3-6 приводятся в движение одним приводом. Звенья пальца 2 приводятся в движение отдельным независимым приводом.
Исходное положение - продольные оси звеньев образуют прямую, обеспечивается за счет того, что пружины 27, 26 и 29 развернуты, а трос 20 не натянут. При включении привода движение передается с силовой части привода 25 на вал 21, обеспечивая его вращение.
С вала 21 вращение передается через пружину 28 на блоки 17 одновременно на всех пальцах 3-6. В пределах каждого пальца реализуется следующая последовательность действий.
Блок 17, вращаясь, натягивает трос 20 и навивает его на себя. Это обеспечивается благодаря тому, что трос 20 закреплен на блоке 17. Натяжение и движение троса 20 обеспечивает за счет охвата блоков 18 и 19 создание на них вращающих моментов, равных по величине, и вращение в ту же сторону, что и вращение блока 17. Закрепление троса 20 на звене 14 и его смещение от осей вращения звеньев 12, 13, 14 (на величину полудиаметра блоков) создает крутящий момент в каждой из вращательных пар 7, 15, 16, соединяющих подвижные звенья 12-14 между собой. В силу равенства диаметров блоков 17-19 крутящий (движущий) момент создается равным по величине. Вследствие того, что жесткость пружины 29 наименьшая, возникает поворот только во вращательной паре 7. Палец 3 начинает поворачиваться во вращательной паре 7, при этом пружина 29 сжимается (закручивается). Движение происходит до тех пор, пока звено 12 не достигнет поверхности захватываемого объекта.
Дальнейшая работа привода обеспечивает вращение вала 21, блока 17 и движение троса 20. Реализуется поворот во вращательной паре 15, при этом сжимается (закручивается) пружина 26.
Вращение звена 15 продолжается до тех пор, пока не возникнет его контакт с захватываемым объектом.
Работа привода обеспечивает поворот звена 14 во вращательной паре 16 до наступления контакта звена с захватываемым объектом.
После достижения взаимодействия всех звеньев пальца 3 и их остановки на захватываемом объекте вал 21 продолжает вращаться. При этом блок 17 пальца 3 неподвижен. Сжимается (скручивается) пружина 29. Как следствие, движение с вала 21 передается на блоки 17 тех пальцев 4-6, звенья которых не достигли контакта с захватываемым объектом.
Соединение подвижного звена 12, сопряженного с корпусом 1, пружина 29 в сочетании с выполнением ее жесткости меньше, чем жесткость пружины 26, обеспечивает последовательность движения при захвате объекта: звено 12, звено 13, звено 14. Данная последовательность позволяет выполнять движение только звена 12 до достижения им поверхности объекта и только затем движения звена 13. Таким образом, исключается поворот последующего звена до достижения поверхности объекта предыдущим. Гарантируется взаимодействие рабочей поверхности звеньев с объектом.
Кроме того, под действием пружины 29 обеспечивается возврат звена 12 в исходное положение при освобождении объекта.
В зависимости от профиля захватываемых объектов, реализуемая последовательность охвата пальцами может быть различна. Однако во всех случаях полная остановка звеньев одного из пальцев не приводит к остановке вала 21 и передаче крутящего момента на блоки 17 других пальцев. Это обеспечивается за счет того, что один конец пружины 28 соединен с блоком 17, а второй с приводным валом 21, общим для пальцев 3-6.
Освобождение объекта из захвата осуществляется следующим образом.
Привод включается на реверсивное вращение. Вал 21 начинает вращаться в противоположную (от режима захвата) сторону. Трос 20 свивается с блока 17, его натяжение уменьшается. Под действием сжатых (свернутых) пружин 26, 27, 29 начинается движение звеньев 12, 13 и 14 в направлении от захваченного объекта. При этом первоначально движется звено 12, т.к. пружина 29 обладает наибольшей жесткостью, затем звено 13 и только после этого звено 14.
Освобождение захваченного объекта происходит одновременно всеми пальцами 3, 4, 5, 6.
Движение звеньев пальцев 3, 4, 5 и 6 реализуется от одного привода. Общее число приводов захвата равно двум. При этом достигается взаимодействие с поверхностью звеньев 12, 13, 14 каждого из пальцев 3, 4, 5 и 6 независимо от профиля поверхности, что обеспечивает надежное удержание объектов со сложной геометрией поверхности.
Сокращение числа приводов позволяет уменьшить габариты захвата, упростить конструкцию и существенно снизить массу всего захвата.
Таким образом, заявляемое устройство обладает меньшими габаритами, более простой конструкцией и меньшей массой.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНЦЕВОЙ ЭФФЕКТОР С ШАРНИРНЫМ УЗЛОМ И ПРИВОД ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2016 |
|
RU2636853C2 |
| МЕДИЦИНСКИЙ МАНИПУЛЯТОР | 2008 |
|
RU2445933C2 |
| Захватное устройство | 1985 |
|
SU1298071A1 |
| МЕЛЬНИЦА ДЛЯ ПЕРЕРАБОТКИ МАТЕРИАЛОВ | 1990 |
|
RU2010606C1 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| УНИВЕРСАЛЬНЫЙ ВСЕНАПРАВЛЕННЫЙ ПАЛЕЦ ЗАХВАТНОГО УСТРОЙСТВА | 2022 |
|
RU2804563C1 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| ПЕРИФЕРИЙНЫЙ СТЫКОВОЧНЫЙ МЕХАНИЗМ | 2017 |
|
RU2657623C1 |
| Захват манипулятора | 1985 |
|
SU1288057A1 |
| Зажимное устройство и станок, оборудованный таким устройством | 2020 |
|
RU2759352C1 |

Изобретение относится к робототехнике и может быть использовано при создании исполнительных устройств манипуляторов и протезов верхних конечностей. На корпусе установлены пальцы. Каждый палец содержит подвижные звенья, соединенные последовательно вращательными парами с параллельными осями вращения. В каждой вращательной паре установлены с возможностью свободного вращения блоки, охватывающиеся тросом, один конец которого закреплен на приводе, а другой - на последнем звене, проходит в пределах каждого звена и охватывает блоки в одном направлении. На осях вращательных пар установлены пружины, соединенные одним концом с блоком, а вторым с подвижным звеном, при этом жесткость каждой последующей от корпуса пружины больше предыдущей. При этом блоки, соосные оси, соединяющей подвижные звенья с корпусом, установлены на приводном валу, связаны с ним через пружину, один конец которой соединен с блоком, а второй - с приводным валом, общим для пальцев, у которых оси, соединяющие подвижные звенья с корпусом, соосны. Изобретение обеспечивает надежное удержание объектов со сложной геометрией поверхности, уменьшение габаритов и массы захвата. 2 ил.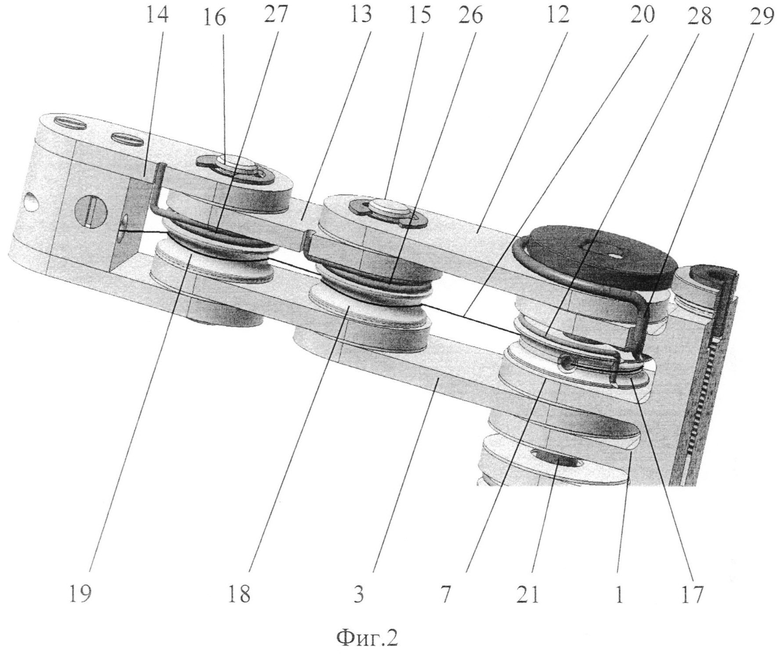
Захват, содержащий корпус, шарнирно установленные на нем пальцы, каждый из которых включает подвижные звенья, последовательно соединенные вращательными парами с параллельными осями вращения, блоки, установленные свободно и соосно осям вращательных пар, соединяющих подвижные звенья между собой, трос, закрепленный одним концом на приводе и вторым на последнем звене, проходит в пределах каждого звена и охватывает блоки в одном направлении, пружины, соединенные одним концом с блоком, а вторым с подвижным звеном, при этом жесткость каждой последующей от корпуса пружины больше жесткости предыдущей пружины, отличающийся тем, что блоки, соосные оси, соединяющей подвижные звенья с корпусом, установлены на приводном валу, связаны с ним через пружину, один конец которой соединен с блоком, а второй с приводным валом, общим для пальцев, у которых оси, соединяющие подвижные звенья с корпусом, соосны, при этом трос закреплен на блоке, установленном на приводном валу, а подвижное звено, сопряженное с корпусом, связано с ним пружиной.
| Гидравлический пресс-молот | 1958 |
|
SU115712A1 |
| ИСКУССТВЕННАЯ КИСТЬ | 2000 |
|
RU2189797C2 |
| Карусельный станок для формования вибрированием железобетонных изделий | 1938 |
|
SU60891A1 |
| US 20130175816 A1, 11.07.2013 | |||
| СПОСОБ ГЕРМЕТИЗАЦИИ РЕЗЬБОВОГО СОЕДИНЕНИЯ ДЛЯ ТРУБ И ЕГО УСТРОЙСТВО | 2008 |
|
RU2386886C1 |

