Изобретение относится к робототехнике и может быть использовано при создании пальцев захватов манипуляторов, а также к медицинской технике для протезов верхних конечностей.
В настоящее время существует множество различных конструкций пальцев захватных устройств (захватов) манипуляторов. Известны пальцы с жесткими фалангами, которые связаны между собой соосными вращательными парами. Максимальная управляемость движением пальца обеспечивается индивидуальной подвижностью фаланг, которая обеспечивается индивидуальными, например, встроенными в фаланги вращательными приводами примерами которых могут служить разработанные в Institute of Robotics and Mechatronics, Германия модели DEXHAND, DLR Hand II (https://www.dlr.de) и технические решения по патентам US2012013139 (2012) и RU2 481 942 (2013) или с тяговыми тросовыми приводами каждой фаланги как, например, для пальцев захватов Shadow Hand фирмы Shadow Hand Company (A. Kochan, “Shadow delivers first hand,” Industrial Robot: an International Journal, vol. 32, no. 1, pp. 15–16, 2005), DLR David HAND разработанный в Institute of Robotics and Mechatronics, Германия и ряда других.
Очевидно, что захватные устройства с такими пальцами представляют собой очень сложные и, соответственно, дорогие технические устройства, которые обладают максимальной функциональностью близкой к кисти человека, зачастую избыточной для большинства технических задач выполняемых с помощью манипуляторов. Известен большой ряд технических решений направленных на упрощение конструкций пальцев захватов, заключающихся в первую очередь в обеспечении подвижности пальца с помощью одного привода - вращательного или линейного. Примерами могут служить патенты ПМ 190472 (2019) (Палец антропоморфного манипулятора) и ПМ 173229 (2017) (Захват) соответственно.
При этом относительные повороты фаланг пальца выполняются довольно сложным механизмом с жесткими «фигурными» рычагами, а параметры механизма обеспечивают последовательность и соотношения величин относительных углов поворотов фаланг. Использование одного тросового привода пальца для обеспечения требуемой последовательности относительных поворотов фаланг в свою очередь потребовало задания различных моментов сопротивлений в сочленениях фаланг на трении RU 2 502 592 (2012) или с помощью упругих элементов в виде, например, сосредоточенных пружин кручения как в патентах ПМ 115712 (2011) и RU 2 570 597 (2014) или упругих объемных вставок, соединяющих фаланги пальца по патенту RU 2 643 753 (2015). В пальце захвата манипулятора по патенту ПМ 145920 (2013) объединены рычажный механизм пальца, тросовый привод и подпружиненность первой фаланги пальца относительно основания захвата. Несмотря на заметное структурное упрощение приведенных пальцев захватных устройств, тем не менее все они сохраняют конструктивную сложность, т.к. включают в себя большое количество разнородных и довольно сложных конструктивных элементов – фаланг, шкивов, пружин, штифтов, крепежных элементов и др. - требующих точного изготовления из качественных материалов и сложной процедуры сборки.
Наиболее близким аналогом, принятым в качестве прототипа и обеспечивающим существенное упрощение конструкции пальца, является палец захвата манипулятора по авторскому свидетельству СССР №1237419 (1986), согласно которому палец выполнен в виде винтовой пружины сжатия и приводится в движение одним тяговым тросом. Трос одним концом соединен с конечным элементом пальца, а другим соединен с выходным звеном тянущего привода осуществляющего втягивание троса, при этом трос расположен внутри пружины и смещен относительно оси пальца в сторону его внутренней поверхности, что при втягивании троса приводом создает изгибающий момент и обеспечивает изгибное деформирование пальца вплоть до контакта пальца с объектом последовательно практически всеми витками и при дальнейшем натяжении троса создает необходимое усилие сжатия объекта. Возврат пальца в исходное положение происходит под действием упругости пружины по мере высвобождения троса приводом. Предусмотренная в патенте возможность придания винтовой пружине пальца прямой конусности, т.е. уменьшения диаметра от основания к его концу, задает по мере уменьшения диаметров витков возрастающее распределение изгибной жесткости витков от корня к концу пальца и, соответственно, определяет последовательность деформации витков начиная с корневых.
Недостатками прототипа являются:
- ограниченная кинематическая функциональность пальца, заключающаяся в том, что данный палец способен изгибаться только в одной плоскости в которой лежат верхняя точка крепления троса на кончике пальца, сам натянутый трос, контактирующий с витками пружины и идущий далее к приводу,
- большая паразитная сила сопротивления натяжению троса из-за сил трения троса о корневые витки пружины, причем процесс натяжения может происходить рывками из-за природы сил трения скольжения т.к. коэффициенты трения и, соответственно, сила трения покоя больше силы трения скольжения, а это в свою очередь приводит к непредсказуемым скачкам силы сжатия объекта, что может приводить к нарушению цельности поверхности объекта и даже к его разрушению.
Задачами изобретения и достигаемый при этом технический результат, являются, повышение кинематических функциональных возможностей пальца и обеспечение плавности нарастания силы сжатия объекта пальцами захватного устройства при ее регулировании путем втягивания троса тянущим приводом.
Технический результат достигается за счет того что, всенаправленный палец захватного устройства, содержащий упругую витую пружину сжатия и приводимый в движение тросовыми тянущими приводами, причем тяговые тросы расположены внутри пружины и смещены относительно оси пальца в сторону его внутренней поверхности, при этом один конец каждого троса закреплен на конечном элементе пальца, а другой конец соединен с тянущим приводом, причем форма пружины пальца имеет постоянный диаметр витков или прямую конусность с уменьшающимся диаметром витков от основания пальца к его концу или обратную конусность с уменьшением диаметра витков от конца пальца к его основанию, при этом палец содержит не менее двух тяговых тросов, причем тросы распределены внутри пружины так, что угол в основании внутреннего рабочего сектора, образованного осью пальца и направлением на два соседних троса составляет менее 180°, а в основании пальца установлена корневая опора, на которой закреплена пружина пальца и тангенциально установлены оси, на которых радиально установлены направляющие вращающиеся шкивы с конусообразными канавками для прокладки на каждом из них соответствующего тягового троса и направления его к тянущему приводу.
Задача обеспечения плавности нарастания силы сжатия объекта пальцами захватного устройства решается за счет того, что в корневой области пальца в зоне контакта троса с пальцем радиально устанавливается направляющий вращающийся шкив с конусообразной канавкой для прокладки троса и направления его к тянущему приводу. Такое решение исключает трение скольжения и тем самым причины возникновения нестабильности сил натяжения троса. Угол наклона касательной к профилю канавки по отношению к оси шкива на дне канавки имеет величину близкую к 90° и плавно снижается практически до 0° на внешней кромке профиля канавки шкива, что вместе с вращением шкива оптимизирует прохождение троса по шкиву при изгибе пальца, исключая резкие перегибы троса на кромке шкива.
Задача повышения кинематической функциональности пальцев решается путем придания пальцу способности изгибаться в любом требуемом направлении за счет того, что в состав известного пальца с одним тросом дополнительно вводятся один или более тяговых тросов для изгиба пальца в любом направлении в любом из рабочих секторов, образованных осью пальца и плоскостями в которых лежат соседние тросы, при этом внутренний угол в основании рабочего сектора составляет менее 180°. Каждый из тросов закреплен на конце пальца, смещен относительно оси пальца в сторону его внутренней поверхности и проложен в канавке своего направляющего шкива.
В случае установки двух тяговых тросов обеспечивается изгиб пальца в любом направлении только во «внутреннем» рабочем секторе, лежащем между плоскостями тросов. Всенаправленность работы пальца, т.е. способность изгибаться в любом требуемом направлении по всей окружности, достигается установкой трех или более тяговых тросов, т.к. в этом случае вся окружность корневого сечения внутреннего пространства пальца разделена на примыкающие друг к другу «внутренние» рабочие сектора соседних пар тяговых тросов. Очевидно, что углы в основании сектора образованного осью пальца и двумя соседними тросами должны быть распределены по окружности корневого сечения внутреннего пространства пружины пальца в соответствии с предпочтительными направлениями работы пальца в составе захвата.
Такие пальцы универсального всенаправленного захватного устройства существенно расширяют разнообразие захватываемых объектов, т.к. дополнительно позволят выполнять ими захватывание объектов, имеющих внутренние полости, изнутри. Направление изгиба пальца и сила сжатия объекта регулируется величинами втягивания тросов.
В то же время, наличие трех или более тросов обеспечивает изменение длины пальцев путем одинакового предварительного втягивания тросов с последующим изгибом пальца в любом требуемом направлении путем дополнительного втягивания соответствующего троса, что также повышает функциональность, т.к. позволяет адаптировать пальцы и захватное устройство в целом к размерам и форме объекта. Придание же пружине пальца обратной конусности, характеризуемой уменьшением диаметра витков от конца пальца к его основанию, позволят организовать изгиб пальца начиная с концевых витков, что может быть востребовано при работе с объектами сложной формы (с выступами, отверстиями на боковых поверхностях и т.п.).
Существенными признаками, общими для предлагаемого изобретения и прототипа являются следующие: выполнение пальца в виде пружин сжатия и изгибание пальца с помощью втягивания одного тягового троса, который одним концом закреплен на конечном элементе пальца, расположен внутри пружины и смещен относительно оси пальца в сторону его внутренней поверхности.
Существенными признаками предлагаемого изобретения, не присущими прототипу и решающими поставленные задачи являются: наличие двух или более тяговых тросов, наличием корневой опоры пальца, наличием радиально установленных на корневой опоре вращающихся шкивов с конусообразными канавками для прокладки тросов, вариантом исполнения пружины пальца с обратной конусностью, характеризуемой уменьшением диаметра витков от конца пальца к его основанию.
Сущность изобретения поясняется следующими рисунками и чертежами.
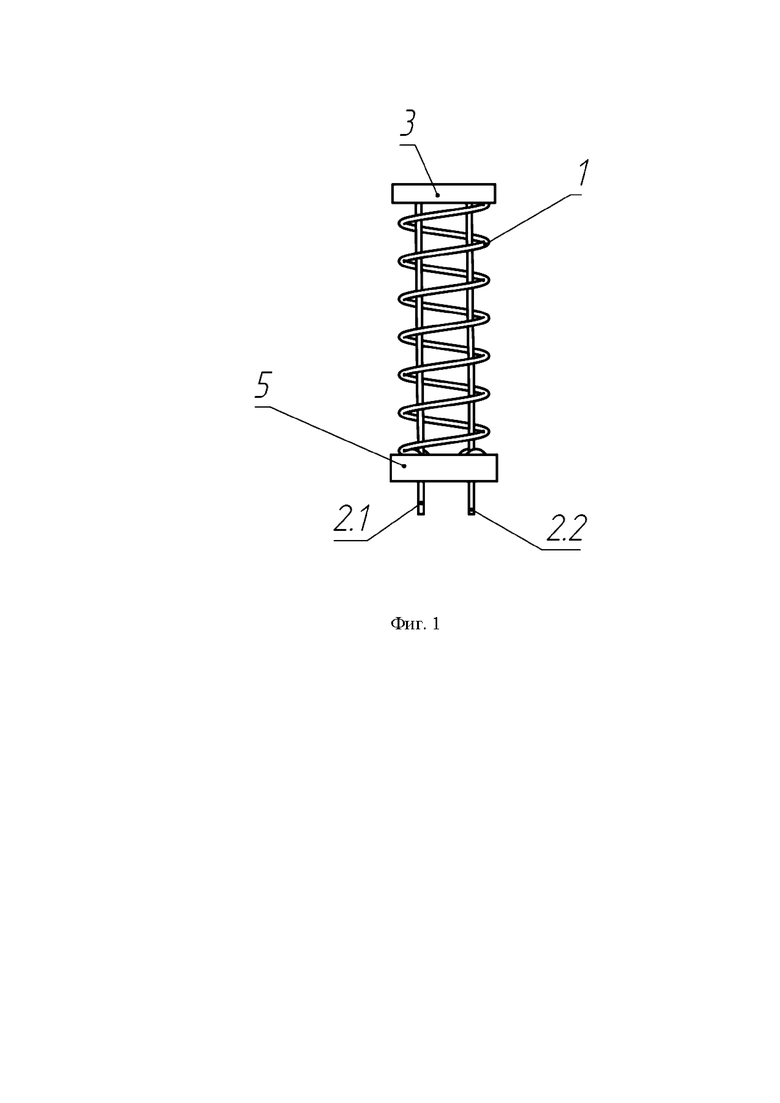
На фиг. 1 показан палец с двумя тяговыми тросами в исходном состоянии, вид спереди. Концевой элемент и корневая опора для простоты показаны условно без конструктивной детализации.
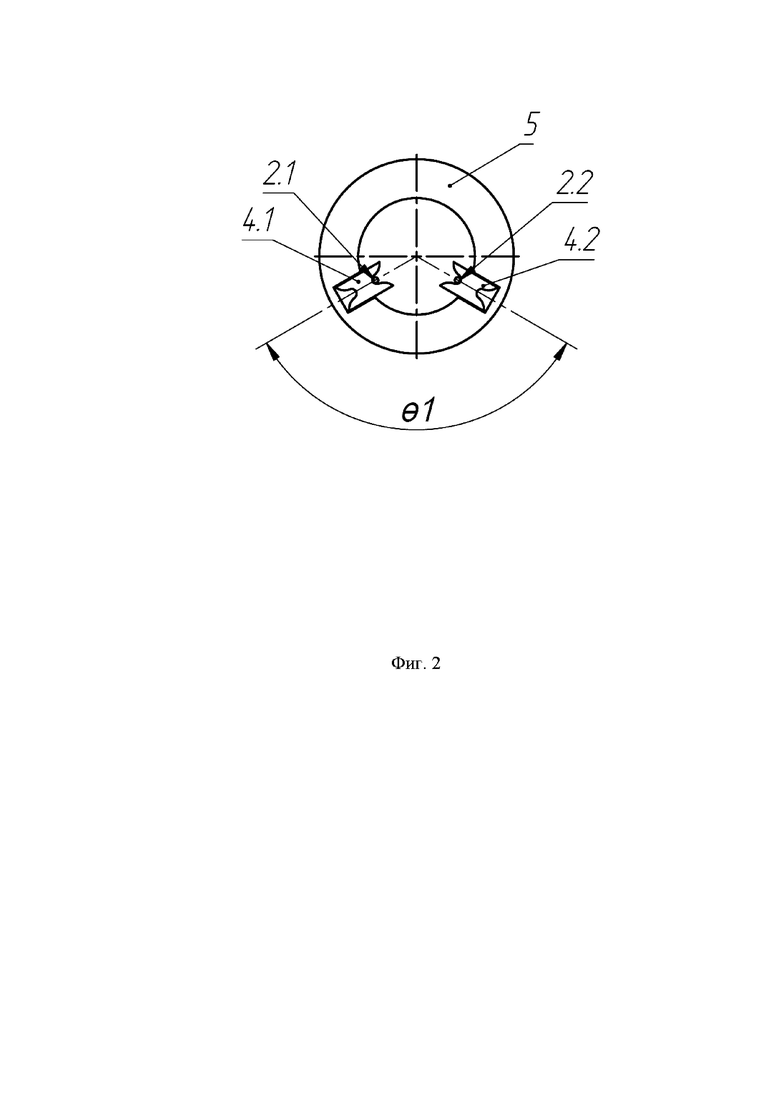
На фиг. 2 показано корневое сечение пальца с двумя тяговыми тросами в исходном состоянии.
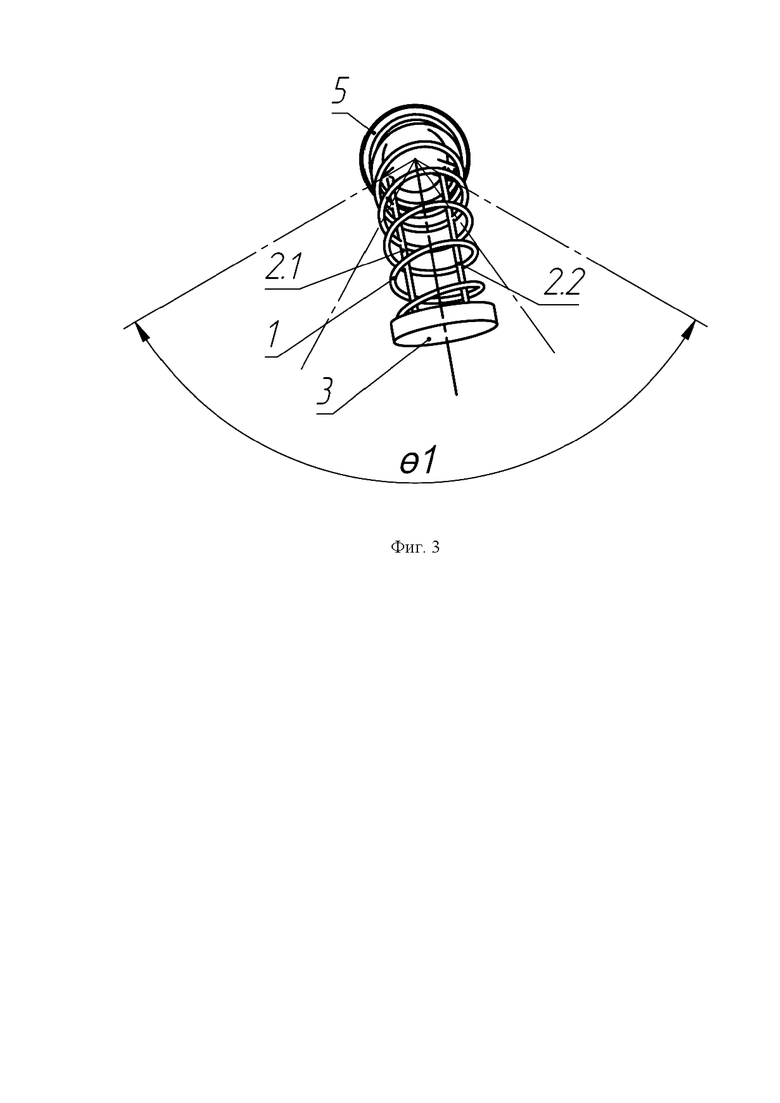
На фиг. 3 показан палец с двумя тяговыми тросами в изогнутом состоянии, вид сверху.
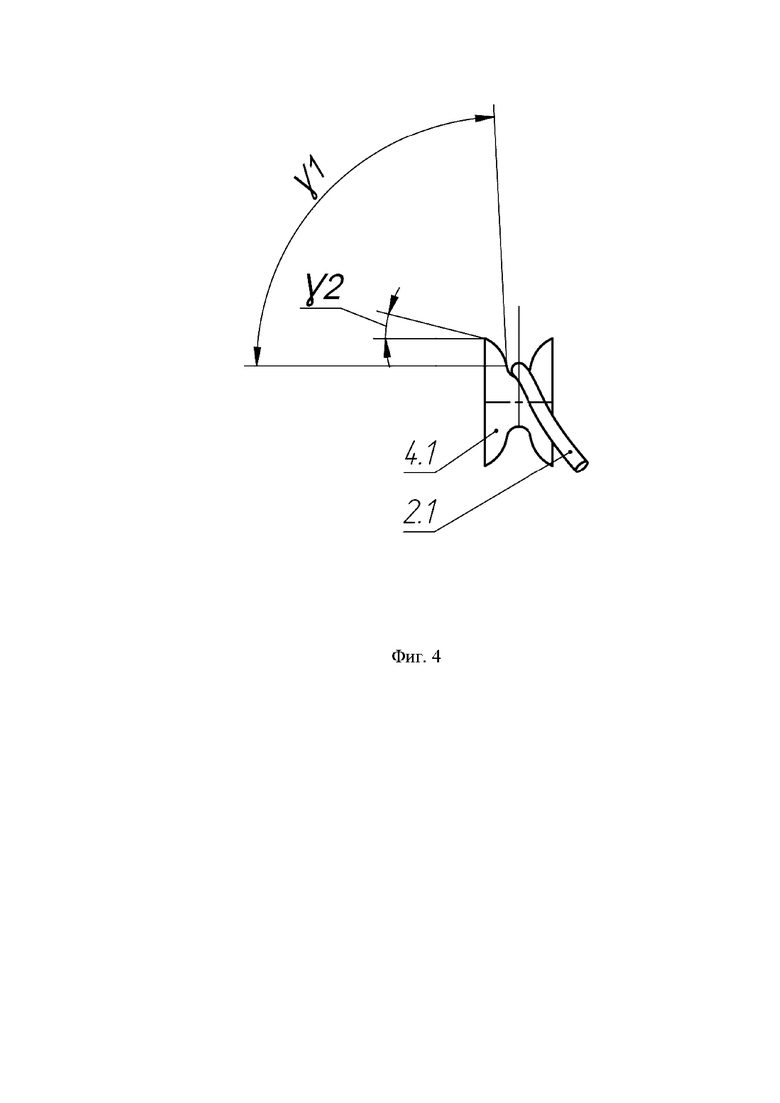
На фиг. 4 показан шкив, профиль его конусообразной канавки и положение троса на шкиве для изгиба пальца, показанного на фиг. 3.
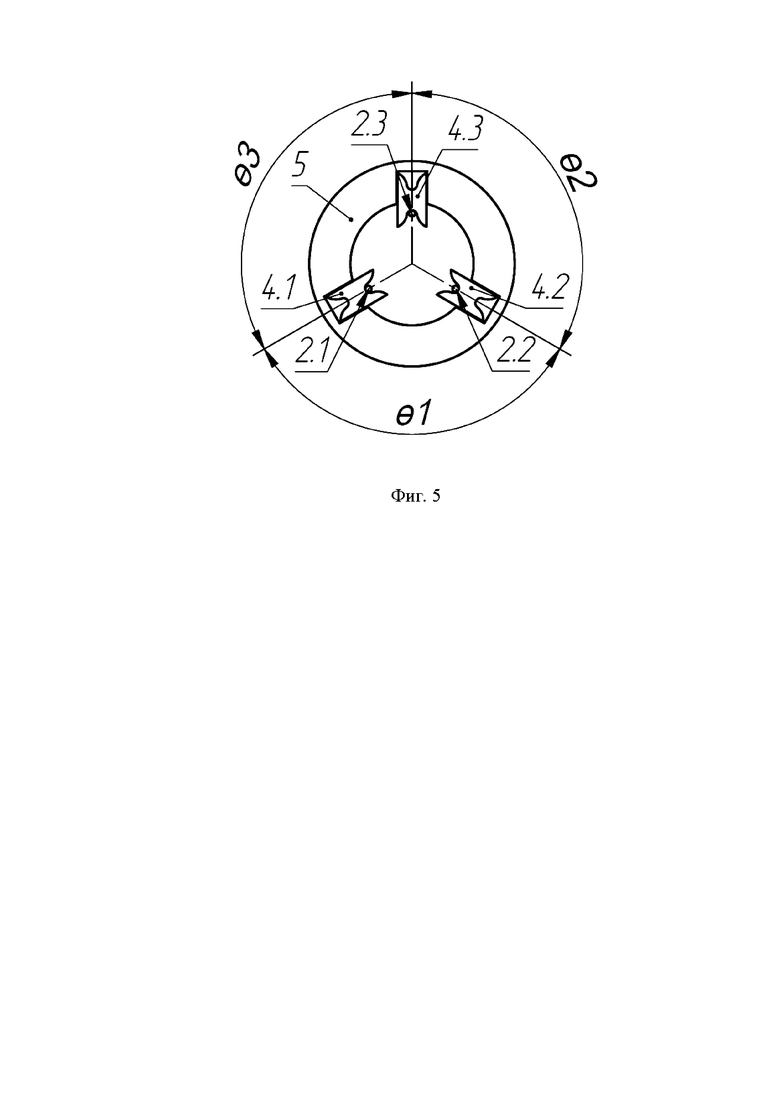
На фиг. 5 показано сечение пальца с тремя тяговыми тросами в исходном состоянии.
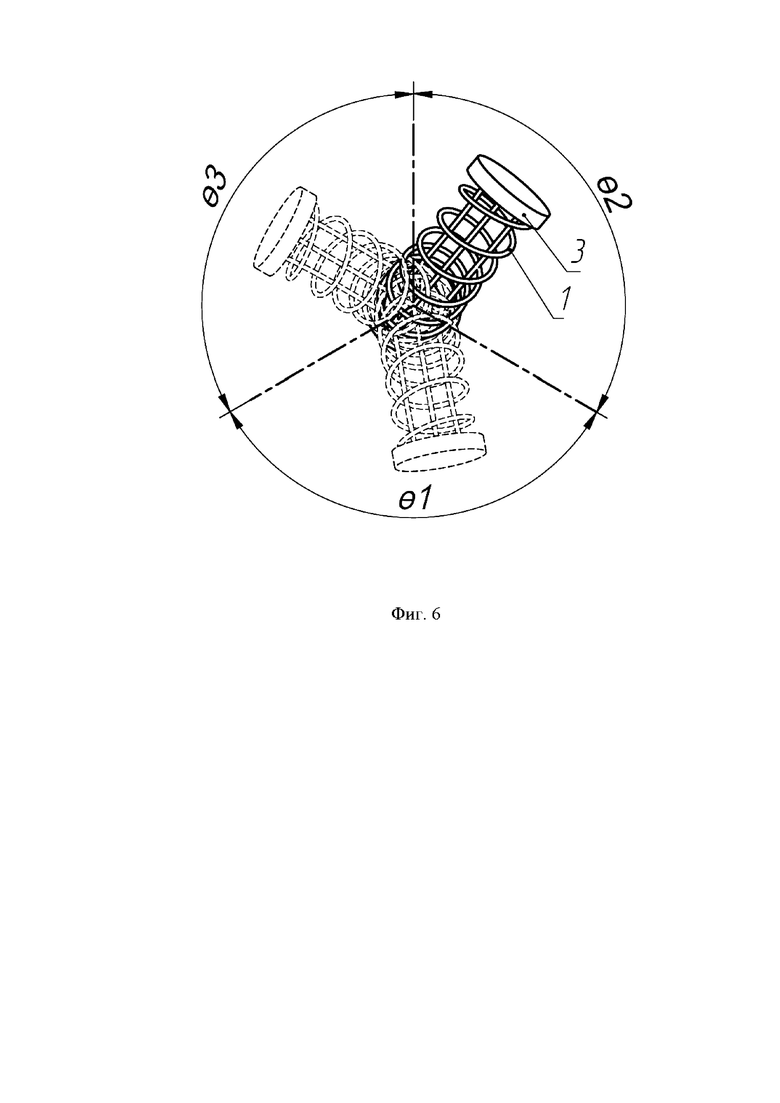
На фиг. 6 показан палец с тремя тяговыми тросами в изогнутом состоянии, вид сверху.
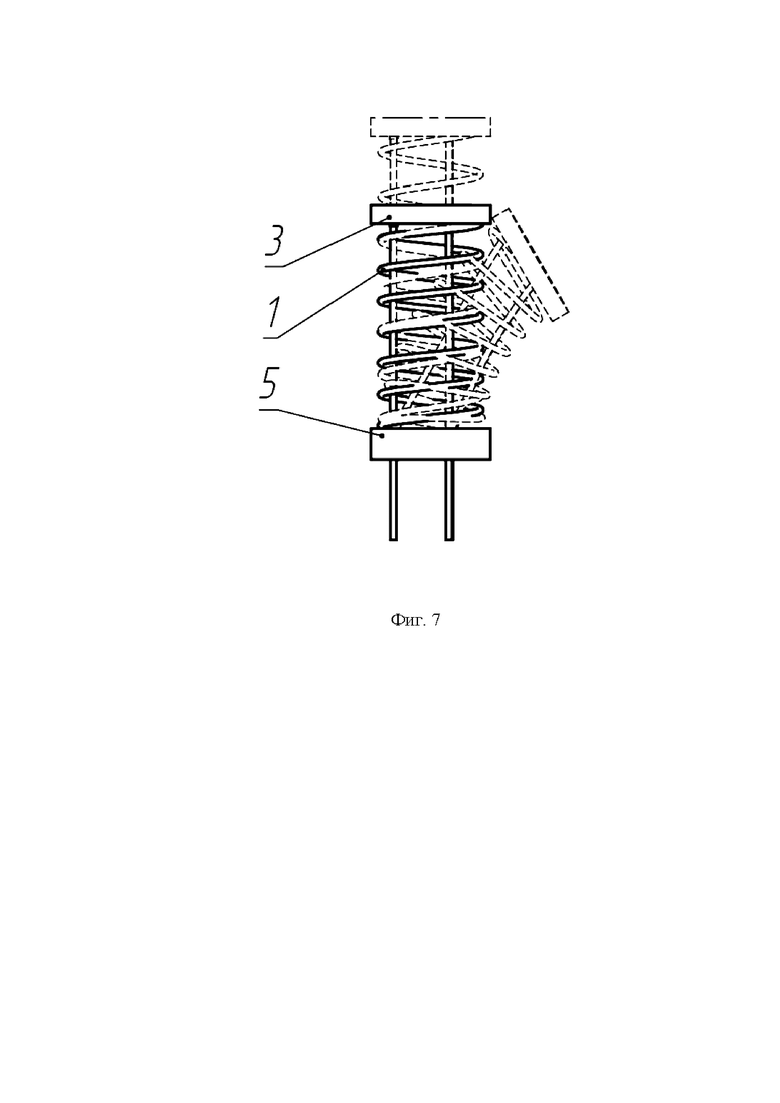
На фиг. 7 показан палец с тремя тяговыми тросами в исходном состоянии (показан пунктирно), укороченный палец и изогнутый укороченный палец (показан пунктирно).
Универсальный всенаправленный палец захватного устройства выполнен в виде винтовой пружины сжатия 1 (фиг.1) и приводится в движение тяговыми тросами 2.1, 2.2, 2.3 (фиг.1, фиг.5). Каждый из указанных тяговых тросов одним концом соединен с конечным элементом 3 пальца (фиг.1), расположен внутри пружины и смещен относительно оси пальца в сторону его внутренней поверхности, проложен по вращающимся шкивам 4.1, 4.2, 4.3 (фиг.2, фиг.5) и вторым концом соединен с тянущим приводом (является принадлежностью захватного устройства и на фигурах не показан). Шкивы установлены на корневой опоре 5 (фиг.2, фиг.5) радиально.
В случае установки двух тяговых тросов 2.1 и 2.2 обеспечивается изгиб пальца в любом направлении только во «внутреннем» рабочем секторе θ1<180°, лежащем между плоскостями тросов, проложенных по шкивам 4.1 и 4.2 соответственно (фиг. 2, фиг. 3). В исходном положении пальца тросы проложены по дну конусообразных канавок шкивов. Угол наклона касательной к профилю канавки шкива по отношению к его оси на дне канавки имеет величину γ1≈ 90° (фиг. 4) и плавно снижается практически до γ2≈ 0° на внешней кромке профиля канавки.
В случае «двухтросового» пальца конусный профиль канавки шкива для упрощения изготовления может быть выполнен только с одной стороны канавки, а шкивы установлены так чтобы конусообразный профиль был обращен внутрь рабочего сектора θ1.
При установке в пальце, например, трех тяговых тросов 2.1, 2.2 и 2.3, проложенных по шкивам 4.1, 4.2, 4.3 (фиг. 5) вся окружность корневого сечения внутреннего пространства пальца разделена на примыкающие друг к другу «внутренние» рабочие сектора θ1, θ2, θ3 соседних пар тяговых тросов. Соответственно, шкивы в этом случае имеют двусторонний профиль канавок.
Палец захвата работает следующим образом. При необходимости изгиба пальца для захватывания объекта захватом в любом из рабочих секторов θ1, θ2, θ3 тянущими приводами захвата втягиваются соответствующие два соседних троса на разные величины ходов тросов: ΔL(2.2)> ΔL(2.1) и ΔL(2.3)> ΔL(2.2), для показанных изгибов пальцев соответственно на фиг. 3 и фиг.6. На рисунках показано одно из реализованных положений пальца внутри соответствующего рабочего сектора, при этом ряд любых других возможных положений пальца в других секторах условно показаны пунктирными линиями (фиг.6) и пунктирными линиями, обозначающими ось пальца в любом из возможных положений внутри рабочего сектора (фиг.3).
При изгибе пальца тросы плавно втягиваются без проскальзывания по боковым поверхностям профиля канавок шкивов от кромки до дна, как показано на фиг.4 для троса 2.1 на шкиве 4.1 для случая изгиба пальца, показанного на фиг.3.
В случае наличия трех или более тросов уменьшение длины пальца выполняется путем предварительного втягивания тросов на одинаковую длину. Изгиб пальца в любом требуемом направлении осуществляется путем дополнительного втягивания соответствующих тросов.
В варианте исполнения пальца с прямой конусностью витков пружины изгиб пружины пальца происходит последовательно, начиная с корневых витков, а варианте исполнения с обратной конусностью, наоборот, изгиб начинается с крайних витков.
Возврат пальца в исходное положение происходит под действием упругости пружины по мере высвобождения тросов приводами.
Предпочтительным материалом пружины пальца является качественная пружинная сталь с высоким пределом упругости, что обеспечит широкий рабочий диапазон изгибного деформирования пальца, стабильность упругих характеристик в процессе эксплуатации и долговечность. В качестве материала троса может быть использован, например, кевлар (пара-арамидное волокно), отличающийся высокой прочностью и высоким модулем упругости, а в качестве материала шкива может быть использован, например, полимерный полиамидный материал капролон, который обладает высокими прочностью и износостойкостью, хорошими антифрикционными свойствами и легко поддается обработке.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОТЕЗ РУКИ ДЛЯ ПАЦИЕНТОВ СО СТЕПЕНЬЮ АМПУТАЦИИ ОТ ПАЛЬЦЕВ ДО ПРЕДПЛЕЧЬЯ, ПРОТЕЗ ЛУЧЕЗАПЯСТНОГО СУСТАВА, ВКЛЮЧАЮЩИЙ ПРОТЕЗ КИСТИ РУКИ, УСТРОЙСТВО БЛОКИРОВКИ ТРОСОВ ТЯГ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (3 ВАРИАНТА), УСТРОЙСТВО УПРАВЛЕНИЯ КОМБИНАЦИЕЙ ПОЛОЖЕНИЯ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (2 ВАРИАНТА) | 2017 |
|
RU2664171C1 |
| ИСКУССТВЕННЫЙ ПАЛЕЦ | 2014 |
|
RU2667624C2 |
| ПАЛЕЦ ТЯГОВОГО ПРОТЕЗА И УСТРОЙСТВО ПРОТЕЗА КИСТИ И ПРОТЕЗА ПРЕДПЛЕЧЬЯ С ТАКИМИ ПАЛЬЦАМИ | 2020 |
|
RU2759777C1 |
| ПОВОДОК ДЛЯ СОБАК ИЛИ ДРУГИХ ДОМАШНИХ ЖИВОТНЫХ | 2010 |
|
RU2535571C2 |
| Веломобиль | 1986 |
|
SU1399210A1 |
| АКТИВНЫЙ МОДУЛЬ СПИНЫ ЭКЗОСКЕЛЕТА | 2023 |
|
RU2825044C1 |
| Вспомогательный механизм для управления самолетом | 1926 |
|
SU4265A1 |
| Тележка со съемником для замены колес транспортных средств | 1978 |
|
SU897593A1 |
| Способ хирургического лечения приводящей контрактуры первого пальца кисти, сочетающейся с нестабильностью пястно-фалангового сустава, у пациента с детским церебральным параличом | 2022 |
|
RU2798960C1 |
| МЕДИЦИНСКИЙ МАНИПУЛЯТОР | 2008 |
|
RU2445933C2 |
Изобретение относится к робототехнике и может быть использовано при создании пальцев захватов манипуляторов, а также к медицинской технике для протезов верхних конечностей. Палец содержит упругую витую пружину сжатия и приводится в движение тросовыми тянущими приводами. Тяговые тросы расположены внутри пружины и смещены относительно оси пальца в сторону его внутренней поверхности. Один конец каждого троса закреплен на конечном элементе пальца, а другой конец соединен с тянущим приводом. Форма пружины пальца имеет постоянный диаметр витков или прямую конусность с уменьшающимся диаметром витков от основания пальца к его концу или обратную конусность с уменьшением диаметра витков от конца пальца к его основанию. Палец содержит не менее двух тяговых тросов. Тросы распределены внутри пружины так, что угол в основании внутреннего рабочего сектора, образованного осью пальца и направлением на два соседних троса, составляет менее 180°, а в основании пальца установлена корневая опора, на которой закреплена пружина пальца и тангенциально установлены оси, на которых радиально установлены направляющие вращающиеся шкивы с конусообразными канавками для прокладки на каждом из них соответствующего тягового троса и направления его к тянущему приводу. Обеспечивается изгиб пальца в любом требуемом направлении, возможность изменения длины пальца и расширение разнообразия захватываемых объектов за счет адаптации пальцев к размерам и форме объектов. 2 з.п. ф-лы, 7 ил.
1. Всенаправленный палец захватного устройства, содержащий упругую витую пружину сжатия и приводимый в движение тросовыми тянущими приводами, причем тяговые тросы расположены внутри пружины и смещены относительно оси пальца в сторону его внутренней поверхности, при этом один конец каждого троса закреплен на конечном элементе пальца, а другой конец соединен с тянущим приводом, отличающийся тем, что форма пружины пальца имеет постоянный диаметр витков или прямую конусность с уменьшающимся диаметром витков от основания пальца к его концу или обратную конусность с уменьшением диаметра витков от конца пальца к его основанию, при этом палец содержит не менее двух тяговых тросов, причем тросы распределены внутри пружины так, что угол в основании внутреннего рабочего сектора, образованного осью пальца и направлением на два соседних троса, составляет менее 180°, а в основании пальца установлена корневая опора, на которой закреплена пружина пальца и тангенциально установлены оси, на которых радиально установлены направляющие вращающиеся шкивы с конусообразными канавками для прокладки на каждом из них соответствующего тягового троса и направления его к тянущему приводу.
2. Палец по п. 1, отличающийся тем, что углы в основании рабочих секторов, образованных осью пальца и двумя соседними тросами, распределены по окружности корневого сечения внутреннего пространства пружины пальца в соответствии с предпочтительными направлениями работы пальца в составе захвата.
3. Палец по п. 1 или 2, отличающийся тем, что в случае установки двух тросов профиль конуса канавки выполнен только на внутренней по отношению к рабочему сектору стороне канавки шкива.
| Захват манипулятора | 1984 |
|
SU1237419A1 |
| WO 2015169886 A1, 12.11.2015 | |||
| КИСТЬ РУКИ РОБОТА | 2013 |
|
RU2551740C2 |
| Гидравлический пресс-молот | 1958 |
|
SU115712A1 |
| КИСТЬ, ПРЕДНАЗНАЧЕННАЯ ДЛЯ АНТРОПОМОРФНОГО РОБОТА, С УЛУЧШЕННЫМИ ПАЛЬЦАМИ | 2015 |
|
RU2643753C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2012 |
|
RU2502592C2 |
| US 10668628 B2, 02.06.2020. | |||
