10
15
Изобретение относится к машиностроению и может быть использовано в промышленных роботах при выполнении различных технологических операций, например сборочных.
Цель изобретения - расширение технологических возможностей и повышение производительности путем обеспечения автоматической сборки комплекта деталей.
На фиг. 1 представлен захват, общий вид; на фиг. 2 - вал, обший вид.
Захват манипулятора содержит корпус с ладонью 1, пальцы, собранные из звеньев 2, и трос 3. На ладони 1 под каждым пальцем, а также на одном из боковых поверхностных звеньев 2 установлены упорные ролики 4. На наружной боковой .поверхности последнего звена 2 и на тыльной поверхности каждого звена пальца установлены направляющие ролики 5, а па передней части каждого звена - зажимные ролики 6. Кроме того, на тыльной поверхности каждого звена 2 расположены па- правляюш,ие 7, па боковой поверхности выполнены направляющие 8, а вдоль каждого пальца выполнено ступенчатое отверстие 9, ось которого смещена в сторону зажимного ролика 6.
Звенья 2 пальца установлены с возможностью перемещения вдоль пальца на пружинящих элементах 10,консольпозакрепленных на ладони . Поперек левого пальца (фиг. ) на ладони 1 установлен вал 11, а поперек правого - вал 12. Валы 11 п 12 выполнены с глухим осевым отверстием 13 (фиг. 2), а на наружной поверхности и.чеется продольный паз 14, который сообщается с полостью отверстия 13 через отверстие 15. В продольном пазу 14 с возможностью ра- , диального перемещения установлена плапка 16, при этом ее боковые поверхности, а также боковые поверхности продольного паза служат направляющими. Между дном продольного паза 14 и нижней поверхностью
пропущен таким же образом по отверстиям и направляющим роликам правого пальца и также прикреплен к ладони 1 в ее правой части. Над последпим звеном 2 пальца установлена пружина 26, а к тросу 3 прикреплен упор 27.
В собранном захвате первое звено 2, например, левого пальца установлено на упорном ролике 4 ладони 1, па упорный ролик 4 первого звена 2 установлено второе звено 2 пальца и т. д.
Звенья 2 имеют возможность наклоняться и перемещаться по направляющим 8 с.меж- НЫ Х звеньев. Постоянный контакт .между поверхностью звена 2 и упорным роликом 4 обеспечивается за счет пружин 28 и 29, причем эластичность последних для разных с.межных поверхностей может быть различной. Блок 25 связан с приводом 30.
В исходном положении пальцы выпрямлены под действием пружинящих элементов 10 20 упругих элементов 28 и 29.
Захват работает следующим образо.м.
Рука подает захват к детали 23. Включается привод 30, под действием которого блок 25 притягивает трос 3, а его упор 27 сжимает пружину 26, которая действует па 25 последнее звено 2, а оно, в свою очередь, на последующие пружину 29 и звено 2 и т. д. Эластичность пружин 29 подбирается так, что к детали 23 вначале приближается первое звено 2, которое перемещается по направлящим 8 и наклоняется относительно упорного ролика 4, затем в контакт с деталью 23 вступает зажи.мной ролик 6 второго звена 2 и, наконец, последнего звена 2, после чего .дальнейшим перемещением блока 25 и троса 3 создают необходи.мые усилия зажима.
Таки.м образом, деталь 23 прижата зажимными роликами 6 звеньев 2 пальцев к валам II и 12 ладони 1. Далее захват перемещает деталь на позицию сборки. Включается привод 20 вала 1 1, и деталь под
30
планки 16 образована полость, которая за- 40 действием винтовых участков Г1оверхности
45
полпена упругим элементом 17, например наполнителем из ги.аропластмассы. Этим же наполнителем заполпепы и отверстия 13 и 15. На упругий элемент 17 воздействует толкатель 18, связанный с приводом 9. Валы 11 и 12 установлены с возможностью поворота вокруг своих осей и по крайней мере один из них, например вал 11, связан с приводом 20. На каждый вал 1 и 12 установлена втулка 21 из эластичного материала с рифленой поверхностью, которая образована винтовыми пазами 22. Такие же винтовые пазы выполнены и на поверхностях зажимных роликов 6, используемых для захвата детали 23. В собранном виде один конец троса 3 посредством пружины 24 прикреплен к левой части ладони 1, а вто- 55 рой его конец проходит по направляющим роликам 5 левого пальца, пропущен по отверстиям 9 звеньев 2, обхватывает блок 25,
50
втулки 21 поворачивается и перемещается к базовой детали. При отсутствии смещения осей собираемых деталей, деталь 23 входит в базовую деталь, а при наличии их вза- и.много смещения деталь 23 своей торцовой поверхностью упирается в базовую деталь и останавливает свое осевое перемещение. В этом случае включается привод 19, и толкатель 18 воздействует на упругий элемент 17, которь й из полости глухого отверстия 13 через отверстие 15 переходит в полость под планкой 16, где возрастающее давление подни.мает ее. При это.м втулка 21 из эластичного материала растягивается и валы 11 и 12 получают форму эксцентриков. Дальнейший поворот валов 11 и 12 вызывает смещение оси детали, этим обеспечивается поисковое движение. Величина смещения зависит от перемещения толкателя 18 и планки 16. Пос
пропущен таким же образом по отверстиям и направляющим роликам правого пальца и также прикреплен к ладони 1 в ее правой части. Над последпим звеном 2 пальца установлена пружина 26, а к тросу 3 прикреплен упор 27.
В собранном захвате первое звено 2, например, левого пальца установлено на упорном ролике 4 ладони 1, па упорный ролик 4 первого звена 2 установлено второе звено 2 пальца и т. д.
Звенья 2 имеют возможность наклоняться и перемещаться по направляющим 8 с.меж- НЫ Х звеньев. Постоянный контакт .между поверхностью звена 2 и упорным роликом 4 обеспечивается за счет пружин 28 и 29, причем эластичность последних для разных с.межных поверхностей может быть различной. Блок 25 связан с приводом 30.
В исходном положении пальцы выпрямлены под действием пружинящих элементов 10 0 упругих элементов 28 и 29.
Захват работает следующим образо.м.
Рука подает захват к детали 23. Включается привод 30, под действием которого блок 25 притягивает трос 3, а его упор 27 сжимает пружину 26, которая действует па 5 последнее звено 2, а оно, в свою очередь, на последующие пружину 29 и звено 2 и т. д. Эластичность пружин 29 подбирается так, что к детали 23 вначале приближается первое звено 2, которое перемещается по направлящим 8 и наклоняется относительно упорного ролика 4, затем в контакт с деталью 23 вступает зажи.мной ролик 6 второго звена 2 и, наконец, последнего звена 2, после чего .дальнейшим перемещением блока 25 и троса 3 создают необходи.мые усилия зажима.
Таки.м образом, деталь 23 прижата зажимными роликами 6 звеньев 2 пальцев к валам II и 12 ладони 1. Далее захват перемещает деталь на позицию сборки. Включается привод 20 вала 1 1, и деталь под
0
действием винтовых участков Г1оверхности
втулки 21 поворачивается и перемещается к базовой детали. При отсутствии смещения осей собираемых деталей, деталь 23 входит в базовую деталь, а при наличии их вза- и.много смещения деталь 23 своей торцовой поверхностью упирается в базовую деталь и останавливает свое осевое перемещение. В этом случае включается привод 19, и толкатель 18 воздействует на упругий элемент 17, которь й из полости глухого отверстия 13 через отверстие 15 переходит в полость под планкой 16, где возрастающее давление подни.мает ее. При это.м втулка 21 из эластичного материала растягивается и валы 11 и 12 получают форму эксцентриков. Дальнейший поворот валов 11 и 12 вызывает смещение оси детали, этим обеспечивается поисковое движение. Величина смещения зависит от перемещения толкателя 18 и планки 16. После попадания детали 23 в базовую деталь привод 20 выключается, толкатель 18 отходит, планка 16 занимает исходное положение, а валы 11 и 12 продолжают соединять детали, обеспечивая осевое перемещение детали 23 за счет винтовых пазов 22 валов 11 и 12. Для освобождения детали 23 из захвата выключают приводы 20 и 30, после чего под действием пружинящих элементов 10 и пружин 28 и 29 пальцы выпрямляются и занимают исходное положение.
Далее цикл повторяется.
Формула изобретения
1. Захват манипулятора, содержащий корпус, имеющий опорную рабочую поверхность (ладонь), и гибкие пальцы, выполненные в виде звеньев, расположенных на приводном тросе и разделенных между собой упругими элементами, при этом на рабочей поверхности звеньев пальцев расположены зажимные элементы, с тыльной стороны вдоль каждого пальца расположен упругий элемент, связанный со звеньями и жестко закрепленный одним концом на корпусе, а трос охватывает блок, шарнирно установленный на штоке привода, отличающийся тем, что, с целью расщирения тех0
5
0
5
нологических возможностей и повыщения производительности путем обеспечения автоматической сборки комплекта деталей, он снабжен расположенными в корпусе и выступающими над опорной рабочей поверхностью (ладонью) валами, выполненными каждый в виде стержня с внутренним каналом, связанным с наружным продольным пазом, в котором установлена с возможностью радиального перемещения планка, при этом на стержне установлена втулка из эластичного материала, а полости в стержнях заполнены упругим рабочим материалом, находящимся в контакте с толкателем, имеющим индивидуальный привод перемещения.
2.Захват по п. 1, отличающийся тем, что валы имеют индивидуальный привод вращения.
3.Захват по п. 1, отличающийся тем, что зажимные элементы выполнены в виде роликов, на корпусе и звеньях смонтированы опорные ролики, а в звеньях выполнены пазы под опорные ролики.
4.Захват по пп. 1 и 3, отличающийся тем, что на нерабочей поверхности звеньев смонтированы направляющие ролики, охваченные приводным тросом.
5.Захват по пп. 1-4, отличающийся тем, что оси валов, блока зажимных, опорных и направляющих роликов лежат в одной плоскости.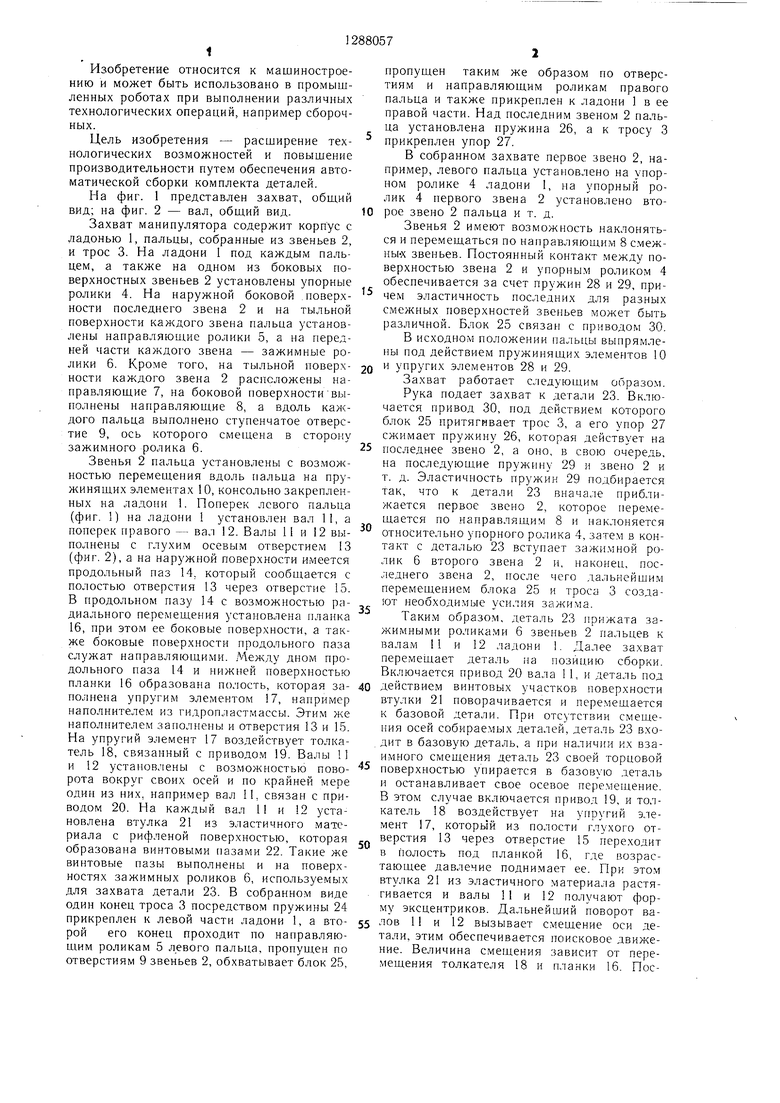

| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1982 |
|
SU1066800A2 |
| Протяжной станок | 1979 |
|
SU856694A2 |
| Схват манипулятора | 1981 |
|
SU992181A2 |
| Устройство для установки упорных колец | 1979 |
|
SU863302A1 |
| Захват манипулятора | 1982 |
|
SU1034897A2 |
| Штамп для обтяжки с растяжением листовых деталей | 1989 |
|
SU1690902A1 |
| Захват манипулятора | 1980 |
|
SU931465A2 |
| Устройство для установки упорных колец | 1979 |
|
SU848246A1 |
| Устройство для сборки деталей | 1978 |
|
SU740472A1 |
| Устройство для установки упорныхКОлЕц | 1979 |
|
SU831491A1 |
Изобретение относится к области машиностроения и может быть использовано в Г1ромын 1ленных роботах при выполнении различных технологических операций. Цель изобретения - расширение технологических возможностей и повьипение производительности за счет обеспечения автоматической .сборки комплекта деталей. Захват манипулятора имеет корпус с опорной поверхностью - ладонью 1. В корпусе расположены приводные валы 11 и 12, выполненные каждый в виде стержня с внутренним каналом и связанным с ним наружным продольным пазом 14. Наружная поверхность каждого вала выступает над опорной рабочей поверхностью - ладонью. В пазу 14 с возможностью радиального перемещения установлена планка 16, причем полость образованная дном паза 14 и поверх- ност1 ю планки 16, и внутренний канал заполнены гидропластмассой, которая при воздействии на нее толкателя деформирует эластичную втулку 21, придавая ва.лам 11 и 12 форму эксцентрика. При сборке детали 23 с базовой валы 11 и 12 вращают деталь 23 и обеспечивают ей поисковое движение до совмещения осей детали 23 и отверстия базовой детали собираемого комплекта. 4 3. п. ф-лы, 2 ил. (С сл 00 00 о СП 
11
15 16
18
19
| Авторское свидетельство СССР № 1161377, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
