Изобретение относится к технической кибернетике и предназначено для диагностирования сложных технических объектов, например электрической передачи тепловозов.
Известен способ диагностирования преддефектного состояния технического объекта (SU, авторское свидетельство №1596348, МПК G06F 13/46, опубл. 30.09.1990 г.), позволяющий определить техническое состояние объекта по анализу сигналов, соответствующих признаку, обладающему максимальной диагностической ценностью среди выбранных признаков состояния объекта.
Недостатком данного способа является вероятность определения ложного класса состояний объекта из-за отсутствия учета взаимовлияния между признаками с максимальной диагностической ценностью и другими признаками состояний с возможно близкими значениями диагностических ценностей, таким образом, при значительном сокращении контролируемых параметров достоверность определения класса технического состояния низка.
Известен способ диагностирования преддефектного состояния технического объекта (RU, патент №2050577, МПК G05B 23/02, опубл. 20.12.1995 г.), состоящий в том, что для выделенной группы состояний объекта определяют показатель интенсивности связи - эмпирическое корреляционное отношение между значениями сигнала признака с максимальной диагностической ценностью и значениями сигналов остальных признаков состояния. Для каждого класса выбранной группы определяют среднее значение эмпирического корреляционного отношения.
Недостатками способа являются необходимость многократного измерения сигналов для всех признаков состояний выбранной группы, что достаточно ресурсоемко, и отсутствие одной из задач диагностики - прогнозирования технического состояния (ГОСТ 20911-89. Техническая диагностика. Термины и определения. М.: Издательство стандартов, 1989. - 14 с.).
Известен способ диагностирования средств связи телекоммуникационных систем (СС ТКС), принятый за прототип, состоящий в том, что среди параметров сложного технического объекта выделяют отдельные параметры, которые являются признаками его технического состояния, сравнивают их с эталонными признаками исходного алфавита классов состояний и по результатам сравнения определяют группу классов возможного технического состояния диагностируемого объекта, причем всю совокупность как внутренних параметров, так и выходных параметров, определяющих техническое состояние СС ТКС, сокращают за счет выявления сильной корреляционной зависимости отдельно между внутренними параметрами, отдельно между выходными и между входными параметрами СС ТКС, из сокращенного множества внутренних и выходных параметров СС ТКС определяют систему регрессионных уравнений, каждое уравнение системы регрессионных уравнений проверяют на адекватность, по заданной достоверности контроля технического состояния с учетом нормированных коэффициентов регрессии в системе регрессионных уравнений осуществляют контроль внутренних параметров СС ТКС с максимальными значениями нормированных коэффициентов регрессии, с учетом динамики изменений выделенных контролируемых параметров осуществляют прогнозирование времени наступления предотказового состояния СС ТКС (RU, патент №2345492, МПК Н04В 17/00, опубл.27.01.2009 г.).
Недостатком способа является повышенная сложность определения зависимостей внутренних и выходных параметров от технического состояния объекта. Также серьезным недостатком способа является использование в качестве эталонных признаков постоянных нормативных значений контролируемых параметров, что существенно ограничивает область применения метода, в частности исключает возможность его использования в системах функциональной диагностики транспортных объектов, где эталонные значения большинства информативных параметров зависят от режима движения объекта, в связи с чем постоянные нормативные значения этих параметров в документации не приводятся.
Техническим результатом реализации предлагаемого способа является повышение достоверности диагностирования сложного технического объекта за счет использования в качестве признаков технического состояния объекта статистических характеристик разностей текущих и эталонных значений внутренних и выходных параметров объекта, снижение трудоемкости и расширение сферы использования способа диагностирования за счет использования в качестве эталонных параметров исходного алфавита классов статистических характеристик разностей текущих и эталонных значений внутренних и выходных параметров исправного объекта, при этом в качестве эталонных значений внутренних и выходных параметров объекта используются их расчетные значения, вычисляемые для каждого режима работы объекта по измеренным текущим значениям входных параметров с помощью нейросетевых моделей.
Технический результат достигается тем, что в способе диагностирования сложных технических объектов, заключающемся в том, что среди параметров сложного технического объекта выделяют отдельные параметры, которые являются признаками его технического состояния, сравнивают их с эталонными признаками исходного алфавита классов состояний и по результатам сравнения определяют группу классов возможного технического состояния диагностируемого объекта, в качестве признаков технического состояния объекта используют статистические характеристики разностей текущих и эталонных значений внутренних и выходных параметров объекта, в качестве эталонных признаков исходного алфавита классов используют статистические характеристики разностей текущих и эталонных значений внутренних и выходных параметров исправного объекта, при этом в качестве эталонных значений внутренних и выходных параметров объекта используют их расчетные значения, вычисляемые для каждого режима работы объекта по измеренным текущим значениям входных параметров с помощью нейросетевых моделей.
Заявленный способ поясняется чертежами.
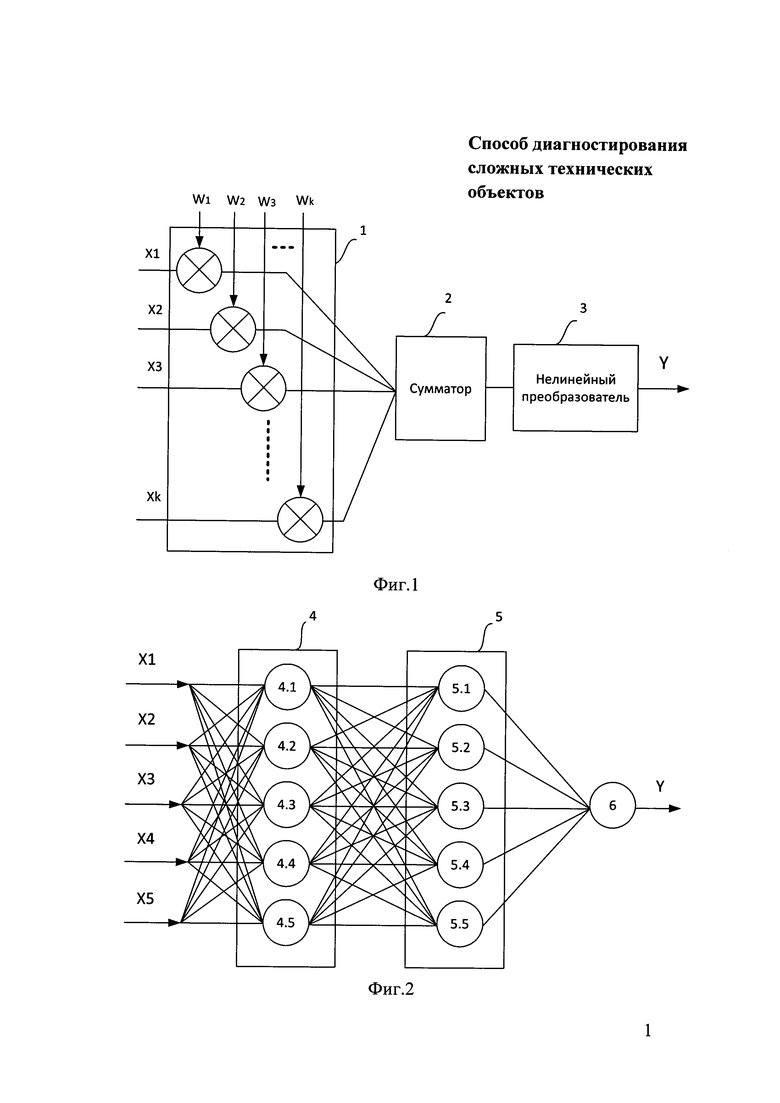
Фиг. 1 - Структура искусственного нейрона.
Фиг. 2 - Структура трехслойной искусственной нейронной сети прямого распространения.
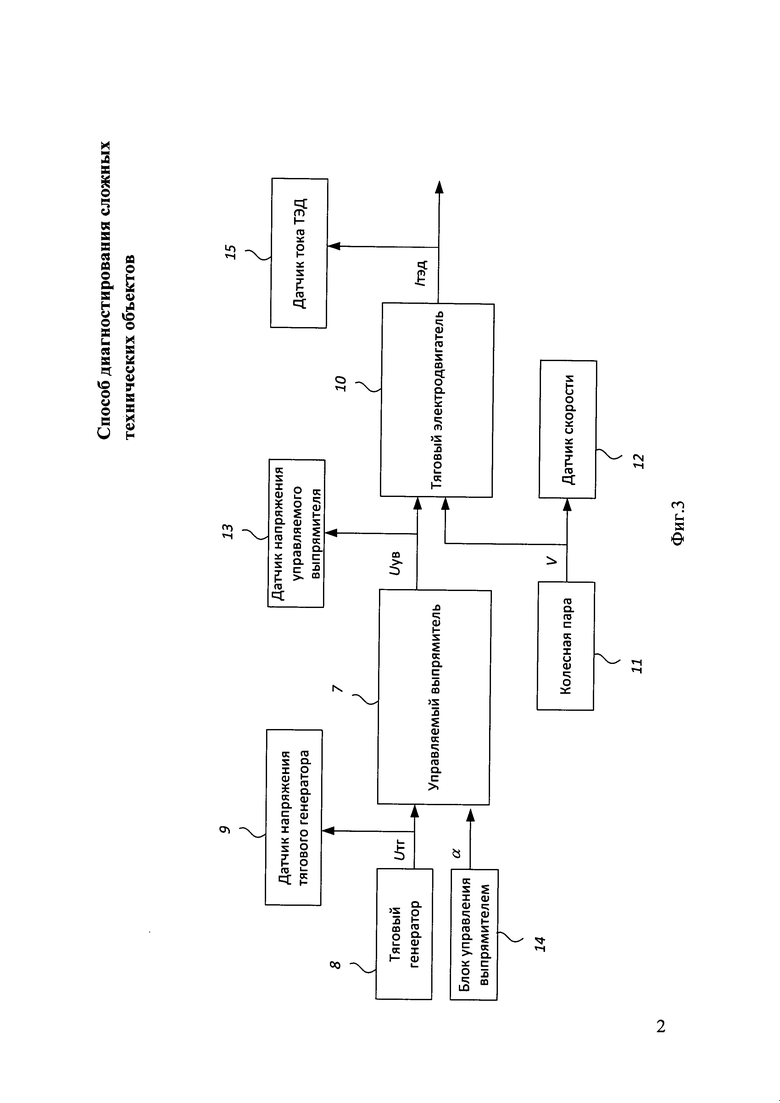
Фиг. 3 - Структурная схема канала управления тяговым электродвигателем тепловоза с электрической передачей мощности.
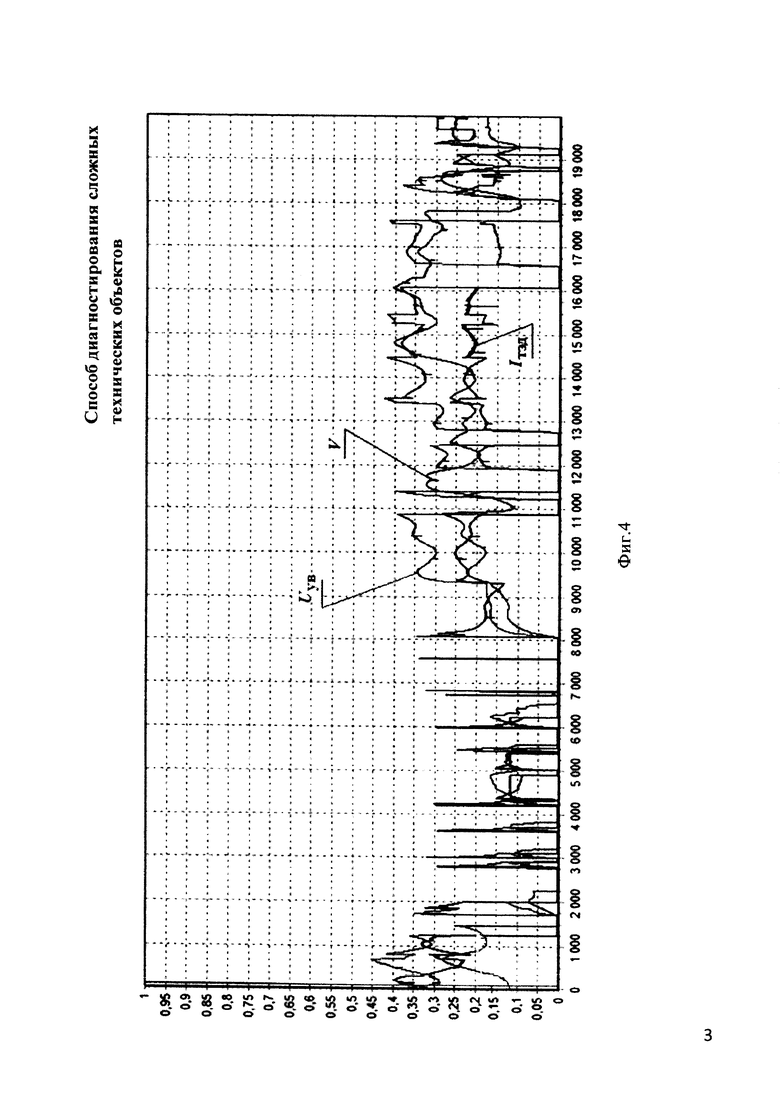
Фиг. 4 - График изменения относительных значений параметров исправного тягового электродвигателя тепловоза в процессе движения.
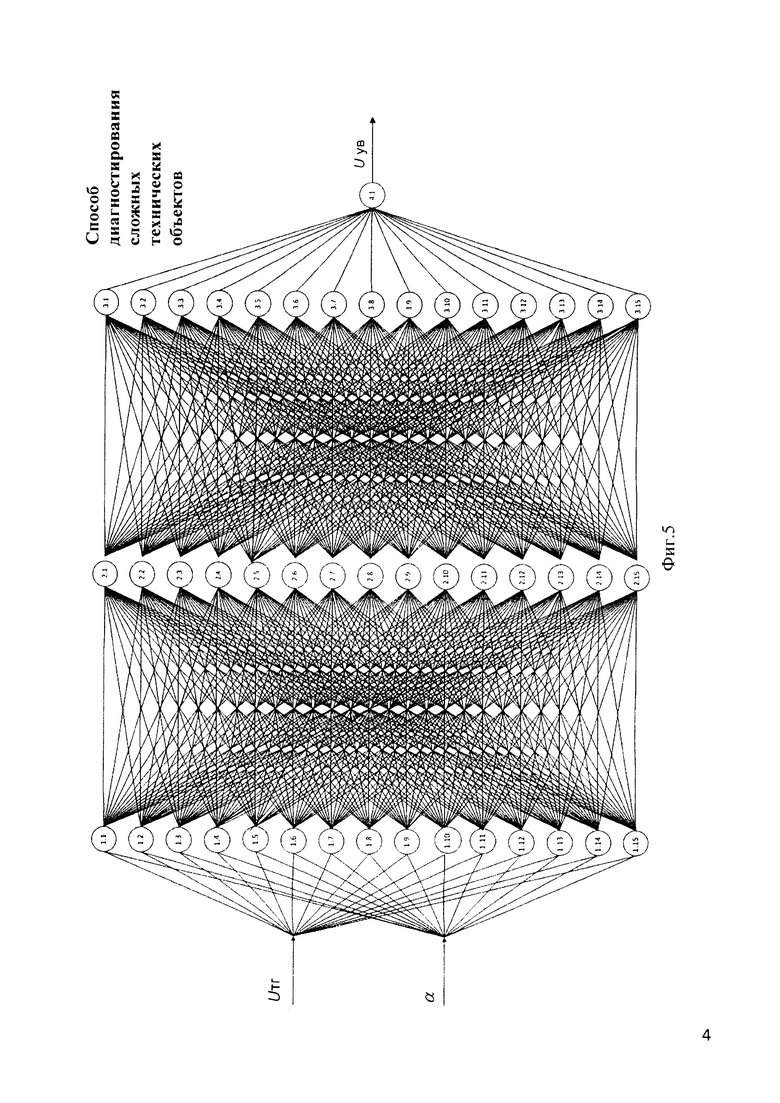
Фиг. 5 - Схема нейросетевой модели канала управляемого выпрямителя.
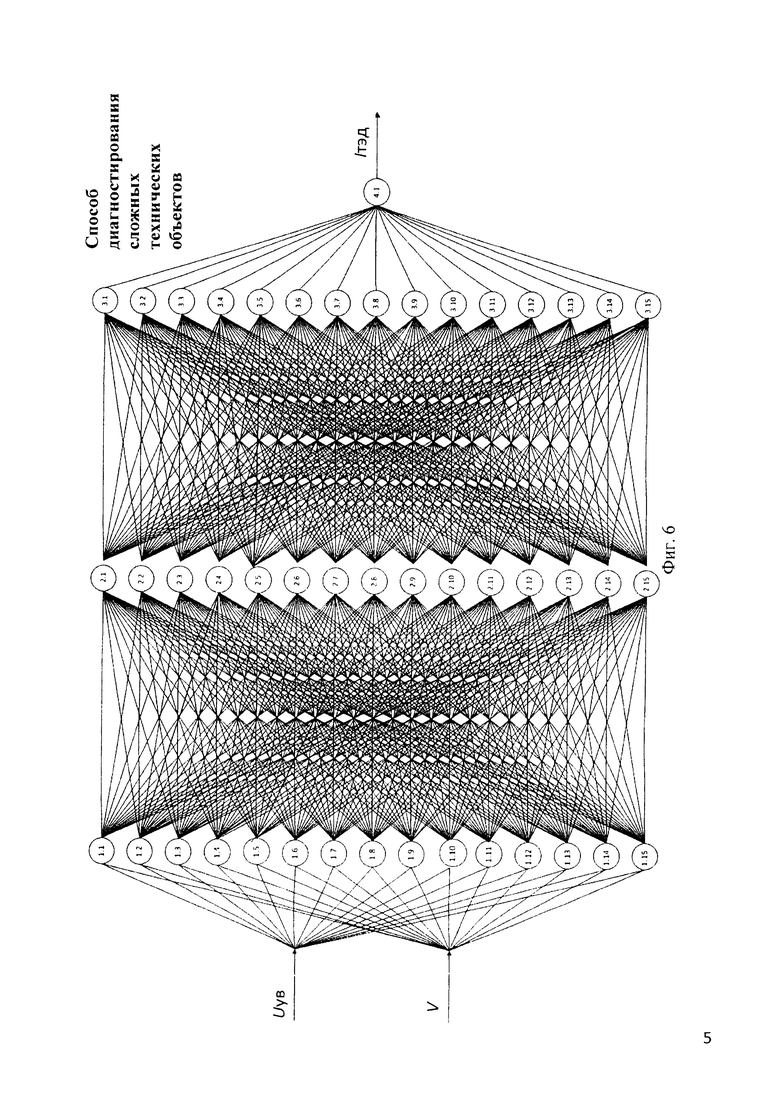
Фиг. 6 - Схема нейросетевой модели тягового электродвигателя (ТЭД) тепловоза.
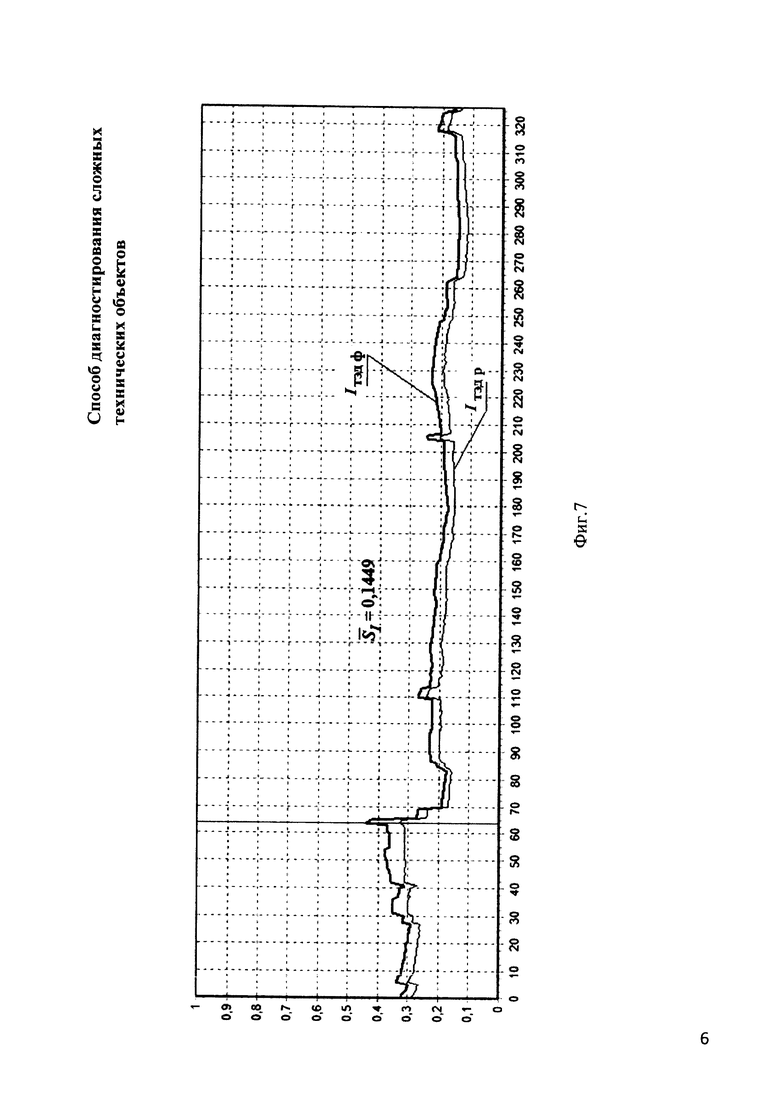
Фиг. 7 - График изменения действительного и расчетного значения тока ТЭД в режимах обучающей выборки для необученной модели.
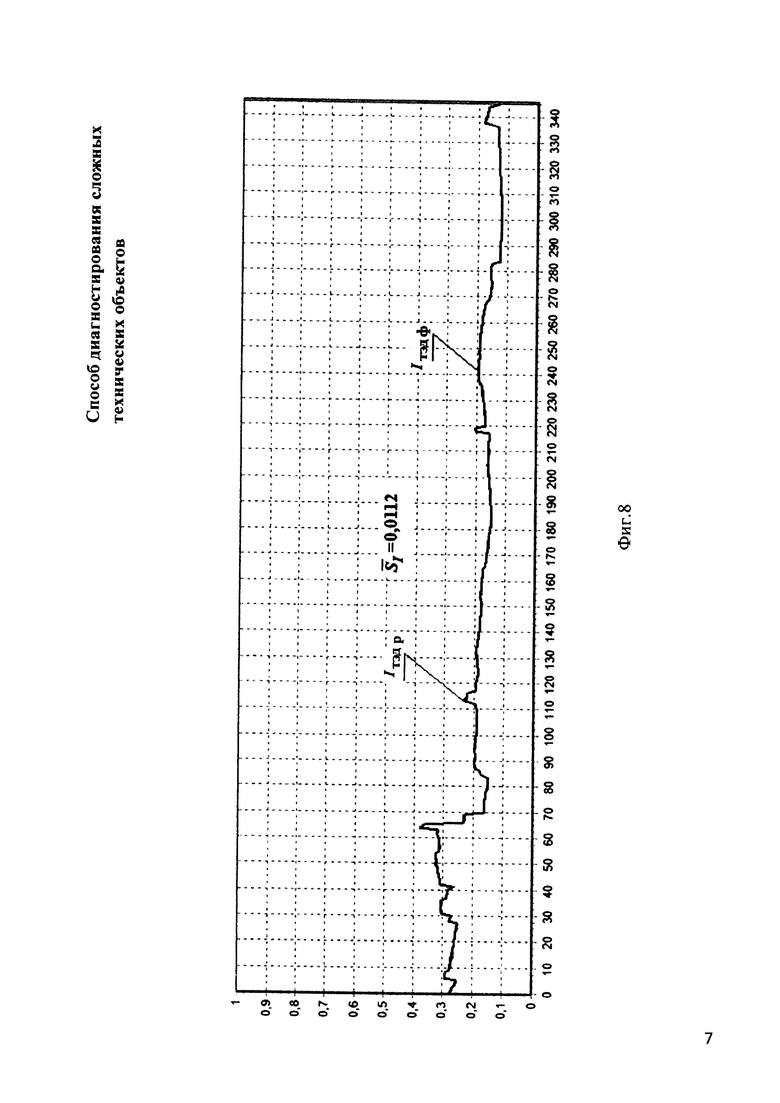
Фиг.8 - График изменения действительного и расчетного значения тока ТЭД в режимах обучающей выборки для обученной модели.
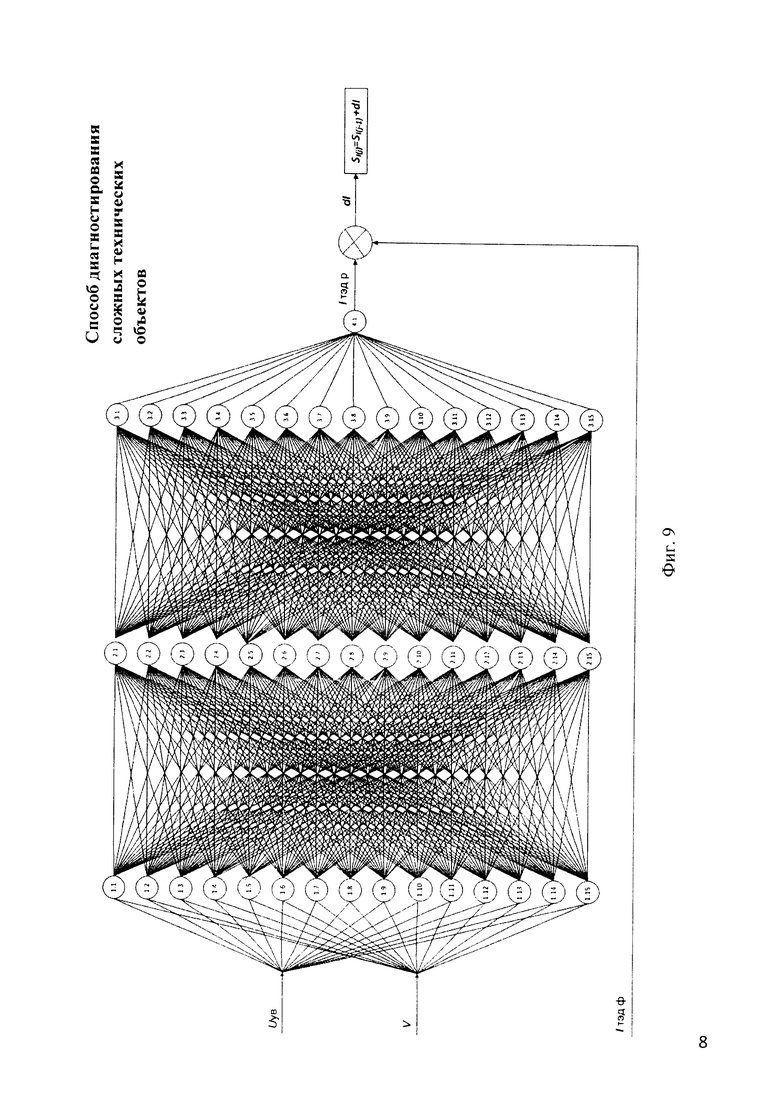
Фиг. 9 - Схема определения признака 
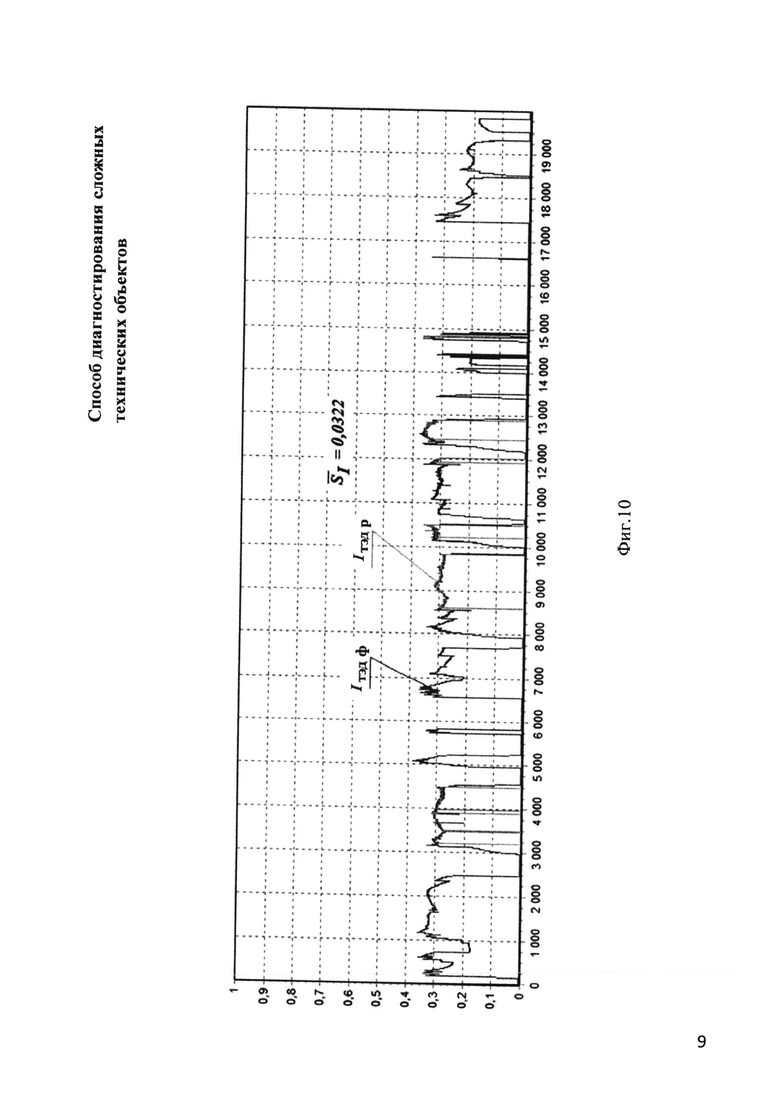
Фиг. 10 - График изменения действительного и расчетного значения тока ТЭД в эксплуатационных режимах работы тепловоза при нормальном техническом состоянии узла ТЭД.
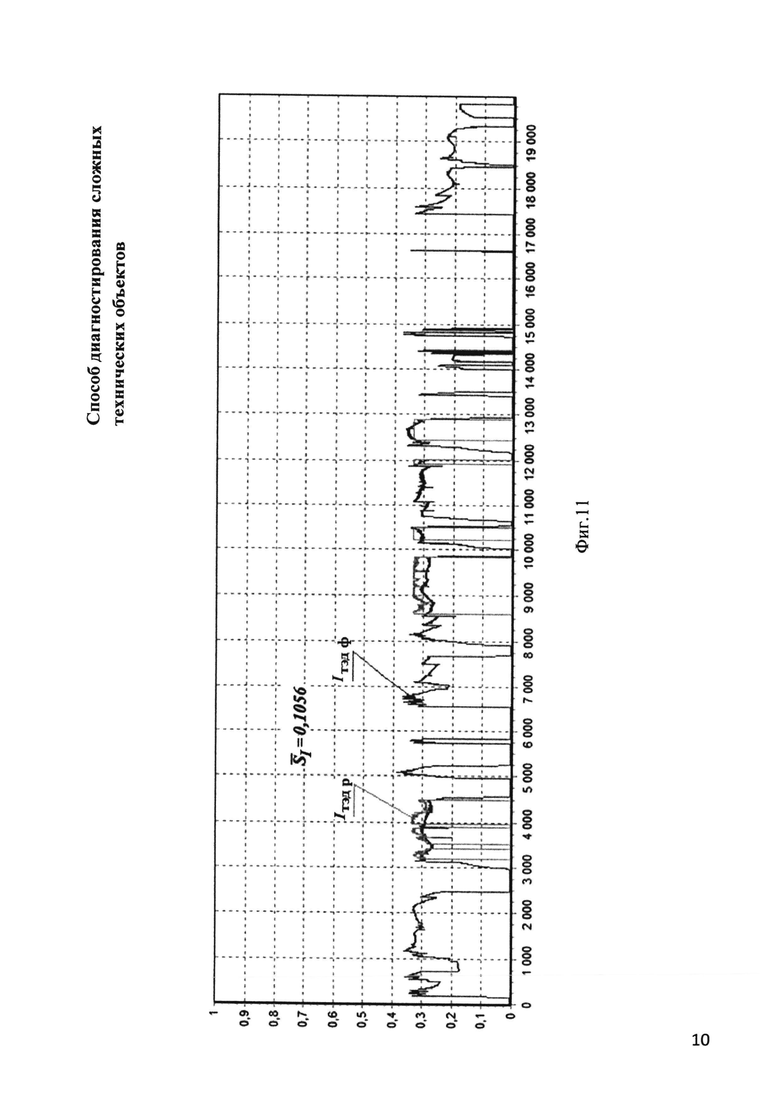
Фиг. 11 - График изменения действительного и расчетного значения тока ТЭД в эксплуатационных режимах работы тепловоза при отказе датчика тока ТЭД.
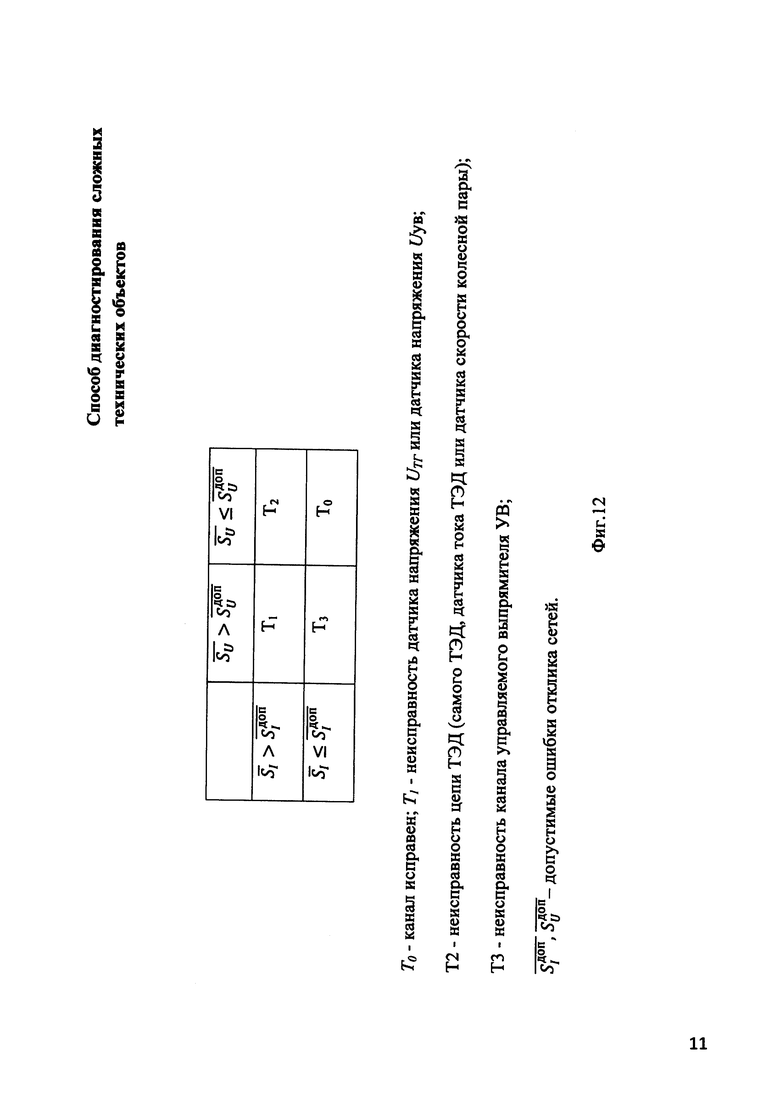
Фиг. 12 - Алфавит классов состояния канала управления тяговым электродвигателем тепловоза.
Нейросетевая модель строится с использованием многослойной искусственной нейронной сети (ИНС). ИНС представляет собой совокупность нейроподобных элементов (нейронов), определенным образом соединенных между собой и с внешней средой с помощью связей, определяемых весовыми коэффициентами (Круглов В.В., Борисов В.В. Искусственные нейронные сети. Теория и практика. - 2-е издание стереотип. - М.: Горячая линия - Телеком, 2002. - 382 с., илл.)
Нейрон (фиг. 1) состоит из элементов трех типов: синапсов (умножителей) 1, сумматора 2 и нелинейного преобразователя 3.
Синапсы 1 осуществляют связь между нейронами, умножают входной сигнал Xi на число Wi, характеризующее силу связи (вес синапса). Сумматор 2 выполняет сложение сигналов, поступающих по дендритам от других нейронов и внешних входных сигналов. Сумматор 2 связан с нелинейным преобразователем 3. Нелинейный преобразователь 3 реализует нелинейную функцию одного аргумента - выхода сумматора 2. Эта функция называется функцией активации или передаточной функцией нейрона с выходным сигналом Y.
Несколько связанных между собой нейронов образуют ИНС. В каждой ИНС различают три вида нейронов:
- входные нейроны, на которые подаются внешние сигналы;
- промежуточные нейроны, осуществляющие преобразование сигналов в ИНС;
- выходные нейроны, выходы нелинейных преобразователей которых представляют выходы ИНС.
Как правило, нейроны одного вида внутри ИНС объединяются в слои. В трехслойной ИНС (фиг. 2) входной слой 4 включает 5 нейронов (4.1…4.5), промежуточный (скрытый) слой 5 включает 5 нейронов (5.1…5.5), выходной слой 6 состоит из одного нейрона. Входные воздействия распространяются от входов к выходу ИНС, в связи с чем ИНС подобного типа называют сетями прямого распространения. Они чаще всего используются для построения нейросетевых регрессионных моделей технических объектов.
При использовании ИНС для моделирования технических объектов количество слоев и число нейронов в каждом из них выбираются с учетом количества входных и выходных параметров объекта и сложности его функционирования.
Способ осуществляется следующим образом. Технический объект оснащается измерительной системой с возможностью регистрации параметров и набором датчиков для контроля параметров, являющихся признаками технического состояния. В процессе эксплуатации объекта производится регистрация входных, внутренних и выходных параметров объекта. Массивы зарегистрированных системой параметров считываются и импортируются в базу данных. В качестве примера рассмотрим процесс оценки технического состояния канала управления ТЭД тепловоза.
Канал (фиг. 3) включает управляемый выпрямитель 7 (УВ), на вход которого от тягового генератора 8 подается переменное трехфазное напряжение UТГ, измеряемое датчиком 9 напряжения тягового генератора. К выходу УВ 7 подключен тяговый электродвигатель 10, вал которого связан с колесной парой 11 тепловоза. Скорость V вращения колесной пары измеряется датчиком скорости 12. Напряжение UУВ на выходе УВ 7 контролируется датчиком 13 напряжения управляемого выпрямителя. Управление выпрямителем осуществляется блоком управления выпрямителем 14 (БУВ) посредством изменения угла α открытия тиристоров. Ток Iтэд тягового электродвигателя 10 контролируется датчиком 15 тока ТЭД.
Режим работы канала в каждый момент времени определяется входными сигналами Uтг, V, α (внешние входные параметры). Его техническое состояние характеризуется напряжением Uув (внутренний параметр) на выходе управляемого выпрямителя 7 и током Iтэд (выходной параметр) тягового электродвигателя 10. Нормативные значения внутреннего и выходного параметров известны только для номинального (расчетного) режима работы тепловоза. В условиях реальной эксплуатации тепловоз и все его агрегаты работают преимущественно в неноминальных, непрерывно изменяющихся режимах работы (фиг. 4), для которых нормативные (эталонные) значения параметров канала не могут быть определены. Таким образом, применение в данном случае метода диагностирования, описанного в прототипе, невозможно.
В соответствии с предлагаемым методом эталонные значения внутреннего и выходного параметров могут быть определены с помощью нейросетевых моделей, описывающих зависимость внутреннего параметра (Uув) от внешних входных параметров канала (Uтг, α) (фиг. 5), а также внешнего параметра канала (Iтэд) от внутреннего (Uув) и внешнего входного параметра (V) (фиг. 6).
Для того чтобы изменение (отклик) выхода нейросетевой модели на изменение значений входов точно соответствовало работе реального объекта, ее предварительно обучают, т.е. подбирают значения весов W1…WK (фиг. 1) таким образом, чтобы разница между значениями выхода сети Y и соответствующего выхода реального объекта в каждом режиме работы объекта была минимальной. Для обучения используется множество значений входных и выходных параметров реального объекта (образов), измеренных в процессе его эксплуатации и называемых обучающей выборкой. Обучение нейросетевой модели выполняется в автоматическом режиме с использованием специальных обучающих алгоритмов.
Последовательное предъявление сети всех k образов из обучающей выборки называется эпохой обучения. Обычно процесс обучения включает от нескольких сотен до нескольких миллионов эпох.
Результат обучения после каждой n-й эпохи оценивается величиной суммарной квадратичной ошибки отклика сети:

где 


По мере обучения нейросетевой модели исходное значение ошибки отклика сети уменьшается. В приведенном (фиг. 7, 8) примере ошибка уменьшилась с величины 0,1449 до 0,0112. Нейросетевая модель считается обученной при выполнении одного из условий:
где n - количество эпох обучения;
nзад - заданное количество эпох обучения;



В процессе диагностирования из базы данных выбираются значения входных параметров соответствующей нейросетевой модели, вычисляется значение выходного параметра и сравнивается с измеренным значением этого же параметра. Разность между измеренным значением выходного параметра и значением на выходе нейросетевой модели (ошибка отклика сети) характеризует отличие текущего технического состояния узла от его состояния на момент обучения сети (фиг. 9). На каждом шаге диагностирования для каждой нейросетевой модели рассчитывается величина допустимой ошибки отклика сети, зависящая от точности измерения входных и выходных параметров сетей, характера их изменения и свойств сети. Для уменьшения влияния случайных изменений параметров на результаты диагностирования оценка технического состояния узла выполняется не по единичным ошибкам отклика сети и их допустимым значениям, а по величине суммарной квадратичной ошибки отклика сети на всем объеме диагностической выборки (от 3000 до 10000 отсчетов). Именно эта суммарная квадратичная ошибка отклика сети вида (1) и является одним из признаков технического состояния объекта (диагностическим параметром). Для повышения точности расчета в качестве входных и выходных параметров нейросетевой модели используются относительные значения параметров объекта, при этом в качестве базовых применяются максимальные значения параметров.
Если текущее техническое состояние объекта (т.е. состояние, в котором формируются диагностические выборки нейросетевых моделей, связывающих внутренние и выходные параметры объекта с его входными параметрами) существенно не отличается от исправного (т.е. состояния, в котором были сформированы обучающие выборки моделей внутренних связей объекта), суммарные квадратичные ошибки отклика сетей будут сопоставимы (с точностью до нескольких процентов) с ошибками обучения сетей (фиг. 10). Эти значения суммарных квадратичных ошибок отклика сетей принимаются в качестве эталонных признаков алфавита классов состояния объекта. В данном случае это 

Если текущее техническое состояние объекта существенно отличается от его исправного состояния, суммарные квадратичные ошибки отклика сетей отдельных или всех нейросетевых моделей объекта (т.е. признаки его технического состояния, в данном случае 



Таким образом, применимость данного способа диагностирования заключается в возможности его использования для диагностирования сложных технических объектов, имеющих большое число взаимосвязанных внутренних и выходных параметров, определение зависимостей между которыми затруднено, а эталонные значения большинства из параметров зависят от режима работы и в документации не приводятся.
Изобретение относится к технической кибернетике. Технический результат - повышение достоверности диагностирования сложного технического объекта и снижение трудоемкости. В способе диагностирования сложных технических объектов среди параметров сложного технического объекта выделяют отдельные параметры, которые являются признаками его технического состояния, сравнивают их с эталонными признаками исходного алфавита классов состояний и по результатам сравнения определяют группу классов возможного технического состояния диагностируемого объекта, в качестве признаков технического состояния объекта используют статистические характеристики разностей текущих и эталонных значений внутренних и выходных параметров объекта, в качестве эталонных признаков исходного алфавита классов используют статистические характеристики разностей текущих и эталонных значений внутренних и выходных параметров исправного объекта, при этом в качестве эталонных значений внутренних и выходных параметров объекта используют их расчетные значения, вычисляемые для каждого режима работы объекта по измеренным текущим значениям входных параметров с помощью нейросетевых моделей. 12 ил.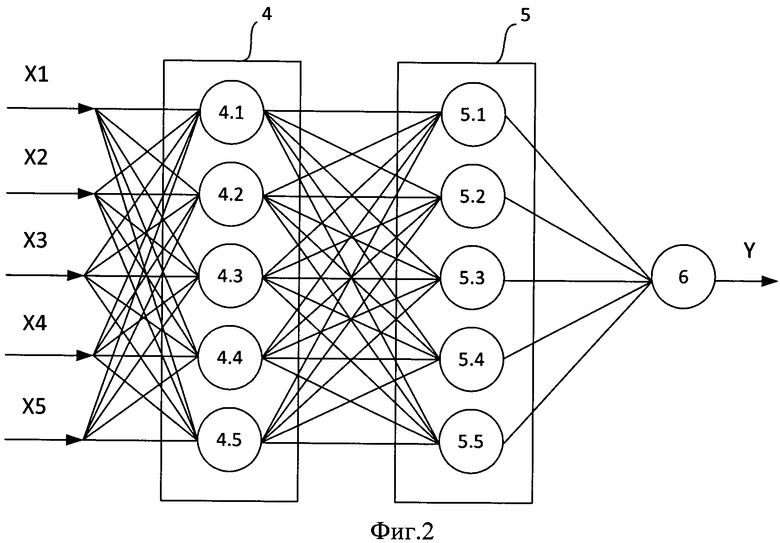
Способ диагностирования сложных технических объектов, заключающийся в том, что среди параметров сложного технического объекта выделяют отдельные параметры, которые являются признаками его технического состояния, сравнивают их с эталонными признаками исходного алфавита классов состояний и по результатам сравнения определяют группу классов возможного технического состояния диагностируемого объекта, отличающийся тем, что в качестве признаков технического состояния объекта используют статистические характеристики разностей текущих и эталонных значений внутренних и выходных параметров объекта, в качестве эталонных признаков исходного алфавита классов используют статистические характеристики разностей текущих и эталонных значений внутренних и выходных параметров исправного объекта, при этом в качестве эталонных значений внутренних и выходных параметров объекта используют их расчетные значения, вычисляемые для каждого режима работы объекта по измеренным текущим значениям входных параметров с помощью нейросетевых моделей.
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2445598C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ СРЕДСТВ СВЯЗИ ТЕЛЕКОММУНИКАЦИОННЫХ СИСТЕМ | 2006 |
|
RU2345492C2 |
| US 7613572 B2, 03.11.2009. | |||

