Изобретение относится к транспортному машиностроению, в частности к способу стабилизации положения движущегося колесного транспортного средства на наклонной опорной поверхности.
Известен способ стабилизации положения движущегося колесного транспортного средства, при котором повышение его курсовой устойчивости происходит за счет регулирования нормальных нагрузок на ведущих колесах пропорционально дестабилизирующим моментам, что достигается перемещением в автоматическом режиме расположенных в передней и задней части дополнительных грузов вдоль осей мостов относительно продольной плоскости, чем обеспечивается создание адекватных нормальных реакций на колесах [1] (прототип).
Однако данный способ, задачей которого является повышение эксплуатационной технологичности колесного транспортного средства, реализуя корреляционную связь между величиной перемещения груза и углом наклона опорной поверхности, вызывающую необходимое перераспределение вертикальных реакций на колеса для создания поворота вверх, не обеспечивает устойчивого движения транспортного средства в заданном технологическом коридоре при выполнении с.-х. операций вследствие сползания пневматики вниз по склону под воздействием внешних факторов, влияющих на тягово-сцепные качества колесного движителя. Таким образом, при движении поперек склона транспортного средства с незаблокированным дифференциалом ведущих мостов и с выключенной системой перемещения грузов, несмотря на появление стабилизирующего момента, способного предотвратить боковой увод пневматики, в случае изменения почвенного фона, при котором сила сцепления с несущей поверхностью в пятне контакта уменьшается, происходит смещение продольной оси транспортного средства от фактического направления движения и соответственно его выход из технологического коридора.
Известно техническое решение, целью которого является обеспечение корректирования направления движения при отклонении продольной оси трактора от фактического направления движения, где при автоматическом срабатывании механизма стабилизации остова и повороте бортовых редукторов относительно полуосей в разные стороны на одинаковый угол посредством шарнирного параллелограмма и трапецеидального шарнирного механизма поворачивают колеса в горизонтальной плоскости в сторону, противоположную сползанию, так что с изменением крутизны склона изменяется угол поворота колес [2].
Однако указанное устройство, обеспечивающее способ корректирования направления движения трактора при сползании его по склону, не предполагает реализацию функции создания адекватных стабилизирующих реакций, компенсирующих воздействие на пневматики боковой составляющей результирующей силы реакций крутосклонного трактора [2], что приводит к появлению моментов увода как задних колес, так и передних, причем момент увода задних ведущих колес значительно больше, чем передних ведущих колес. Вследствие этого движущийся поперек склона трактор имеет постоянную тенденцию не только к выходу из технологического коридора по причине смещения его продольной оси от фактического направления движения, но и к развороту в собственно коридоре движения относительно своего центра масс, что является закономерным результатом взаимодействия эластичной шины с наклонной опорной поверхностью. Предотвращение подобного явления с помощью способа, реализуемого известным техническим решением, приводит к необходимости постоянного воздействия оператора на органы системы рулевого управления, что в условиях склонного земледелия неизбежно введет трактор в неустановившийся режим траекториального движения - «рыскание машины» в пределах технологического коридора и может привести не только к недопустимым нарушением агротехнических требований при проведении с.-х. работ, но и к опрокидыванию самого трактора.
Задачей предложенного способа является повышение эксплуатационной технологичности колесного транспортного средства.
Техническое решение, при котором осуществляется поворот транспортного средства вверх по склону пропорционально углу наклона, достигается за счет реализации излишней поворачиваемости путем изменения величины углов увода пневматических колес посредством автоматического регулирования внутришинного давления адекватно величине отклонения от траектории движения.
Как в известном техническом решении [1], так и в способе, реализуемом устройством для предотвращения сползания трактора по склону [2], углы увода задних и передних колес спроектированы так, что предполагают движение колесной машины в соответствии с принципом недостаточной поворачиваемости, т.е. углы увода передних колес δпк больше углов увода задних колес δз.к. (δп.к.>δз.к.). Недостаточная поворачиваемость, реализуемая в условиях при перемещении по горизонтальной опорной поверхности, стабилизирует устойчивое движение, снижает риск опрокидывания на интервалах пути, где траектория проходит поворот. Так как на наклонной поверхности транспортное средство подвергается воздействию боковой составляющей силе, направленной вдоль склона вниз, которая аналогична центробежной силе при повороте в горизонтальной плоскости, вызывающей при недостаточной поворачиваемости увод трактора от центра поворота по окружности с бесконечно-большим радиусом, чем и является технологическая траектория. Вследствие того, что при движении поперек склона тяговое средство тенденциозно отклоняется от направления движения вниз по склону, чему способствует недостаточная поворачиваемость (δп.к.>δз.к.) серийной конструкции колесного движителя, то перейдя к реализации излишней поворачиваемости, которое можно использовать как контрявление, получим устойчивое курсовое движение транспортного средства в пределах технического коридора. При конструктивном исполнении ходовой части с излишней поворачиваемостью, т.е. когда углы увода задних колес δЗ.К. больше углов увода передних колес δп.к. (δп.к.<δз.к.), центр поворота машины располагается выше по склону, что позволяет осуществить поворот вверх и тем самым компенсировать поперечное смещение вниз, вызванное разрушением грунта в пятне контакта с опорной поверхностью.
В результате сопоставительного анализа установлено, что заявляемый способ, в котором осуществляют поворот транспортного средства вверх по склону пропорционально углу наклона опорной поверхности, отличается от обоих технических решений [1] и [2] тем, что реализуют излишнюю поворачиваемость за счет изменения углов увода пневматических колес. Это позволяет сделать вывод о его соответствии критерию «новизна».
Оба технических решений [1] и [2] не обеспечивают режим эксплуатации трактора, при котором осуществляют автоматическое регулирование внутришиннного давления адекватно величине отклонения от траектории движения с целью изменения величины углов увода пневматических колес. Это позволяет сделать вывод о его соответствии критерию «существенные отличия».
Сущность изобретения поясняется чертежами.
На фиг. 1 изображены варианты траекторий движения движущегося колесного транспортного средства на наклонной опорной поверхности; на фиг. 2 изображено на наклонной опорной поверхности транспортное средство с автоматическим регулированием внутришинного давления, включающим пневмораспределитель, маятниковый датчик, компрессор и пневмомагистраль.
Предлагаемый способ стабилизации положения движущегося колесного транспортного средства на наклонной опорной поверхности реализован следующим образом.
При движении поперек склона на транспортное средство действует составляющая сила веса, параллельная уклону, и при отключенном автоматическом регулировании внутришинного давления, создаются углы увода в шинах передних и задних колесах серийной конструкции колесного движителя следующим образом: углы увода передних колес δп.к. больше углов увода задних колес δз.к. (δп.k.>δз.к.), что соответствует принципу недостаточной поворачиваемости. При этом создается поворот транспортного средства вниз по склону, т.е. появляется смещение вниз, вызванное углами увода  а также в данном случае имеет место сползания машины вниз (lск) вследствие разрушения грунта в пятне контакта с опорной поверхностью (траектория 1) (фиг. 1). Курсовая устойчивость машины в этом случае неудовлетворительная.
а также в данном случае имеет место сползания машины вниз (lск) вследствие разрушения грунта в пятне контакта с опорной поверхностью (траектория 1) (фиг. 1). Курсовая устойчивость машины в этом случае неудовлетворительная.
При движении также поперек склона транспортного средства (фиг. 2) с недостаточной поворачиваемостью и включенным автоматическим регулированием внутришинного давления маятниковый датчик 1 принимает вертикальное положение и подает сигнал на пневмораспределитель 2, который задает режим спуска воздуха на задних колесах и на компрессор 3 для закачки воздуха в передние колеса через пневмомагистраль 4. При этом давление воздуха в шинах изменяется так, чтобы углы увода задних колес были больше углов увода передних колес (δп.к.<δз.к.). Необходимо изменять внутришинное давление таким образом, чтобы создать поворот машины вверх (траектория 2) компенсируя поперечное смещение вниз, вызванное разрушением грунта в пятне контакта с опорной поверхностью  тем самым задается прямолинейная траектория (траектория 3), причем функция радиуса поворота Rпов.=f(α) пропорциональна углу наклона опорной поверхности α. Во время использования данного способа будет отсутствовать смещение, созданное углами увода транспортного средства с недостаточной поворачиваемостью
тем самым задается прямолинейная траектория (траектория 3), причем функция радиуса поворота Rпов.=f(α) пропорциональна углу наклона опорной поверхности α. Во время использования данного способа будет отсутствовать смещение, созданное углами увода транспортного средства с недостаточной поворачиваемостью 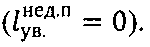
Достигают повышения эксплуатационной технологичности транспортного средства вследствие компенсации отклонения от технологической траектории вниз по склону, при этом улучшается его курсовая устойчивость.
При возврате транспортного средства на горизонтальную опорную поверхность устанавливается в автоматическом режиме внутришинное давление к исходным значениям, т.е. задается принцип недостаточной поворачиваемости.
Заявляемый способ позволяет работать на склонах с различной крутизной опорной поверхности, обеспечивая удовлетворительную курсовую устойчивость, при этом снижается утомляемость оператора, что позволяет в свою очередь не только повысить производительность, но и значительно снизить количество несчастных случаев на производстве, связанных с опрокидыванием машин.
Источники информации
1. Способ стабилизации положения колесного транспортного сред-ства: пат. РФ 2399538, МПК 4 B62D 37/04 / В.В. Реймер, Е.М. Асманкин, B.C. Стеновский, А.А. Сорокин. - №2008146172/11; заявл. 21.11.08; опубл. 27.05.10, Бюл. №15.
2. А.с. СССР 604710, МПК 4 B60G 19/10, B62D 49/08. Колесный трактор для работы на крутых склонах [[Текст] / П.А. Амельченко, А.В. Войтиков, А.Г. Мюлляр, Б.А. Дикуть, В.Я. Шнейсер. - №2312738/11; заявл. 12.01.76; опубл. 30.04.78, Бюл. №16. - 4 с.: ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ НА НАКЛОННОЙ ОПОРНОЙ ПОВЕРХНОСТИ ДВИЖУЩЕГОСЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА С НАВЕСНЫМ ОРУДИЕМ, ОБОРУДОВАННЫМ ПНЕВМАТИЧЕСКИМИ КОЛЕСАМИ | 2023 |
|
RU2818542C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2399538C2 |
| Способ повышения устойчивости крутосклонного колесного транспортного средства при движении на наклонной поверхности и устройство для его осуществления | 1978 |
|
SU867704A1 |
| Крутосклонный трактор | 1980 |
|
SU893593A1 |
| Подвеска задних колес крутосклонного трактора | 1990 |
|
SU1713839A1 |
| Устройство для определения параметров траектории движения колесного транспортного средства | 1987 |
|
SU1415111A1 |
| Способ поворота, обеспечивающий безуводный режим качения шин двухосной мобильной машины | 2017 |
|
RU2656983C1 |
| Колесное транспортное средство для работы на склонах | 1987 |
|
SU1463523A1 |
| Регулируемый межколесный дифференциальный механизм (МКДМ) для легковых автомобилей (4к2) | 2023 |
|
RU2819467C1 |
| СПОСОБЫ ОБРАБОТКИ ПОЧВЫ И УПРАВЛЕНИЯ И МАШИНА ДЛЯ ИХ РЕАЛИЗАЦИИ | 2007 |
|
RU2370007C2 |


Изобретение относится к области транспортного машиностроения. Способ стабилизации положения движущегося колесного транспортного средства на наклонной опорной поверхности заключается в том, что осуществляют поворот транспортного средства вверх по склону пропорционально углу наклона. Реализуют излишнюю поворачиваемость за счет изменения величины углов увода пневматических колес посредством автоматического регулирования внутришинного давления адекватно величине отклонения от траектории движения. Достигается улучшение курсовой устойчивости транспортного средства. 2 ил.
Способ стабилизации положения движущегося колесного транспортного средства на наклонной опорной поверхности, при котором осуществляют поворот транспортного средства вверх по склону пропорционально углу наклона, отличающийся тем, что с целью компенсации отклонения от траектории движения вниз по склону реализуют излишнюю поворачиваемость за счет изменения величины углов увода пневматических колес посредством автоматического регулирования внутришинного давления адекватно величине отклонения от траектории движения.
| WO 2011057854 A1, 19.05.2011 | |||
| Способ укрепления лессовидного грунта | 1983 |
|
SU1122786A1 |
| Устройство стабилизации движения мобильной машины на склоне | 1989 |
|
SU1736805A1 |

