1I
Изобретение относится к устройствам для испытания колесных транспорт I ных средств, преимущественно ст -ста- I билизацией остова и ходовой части на ;склоне. .
Цель изобретения - повышение точности измерения.
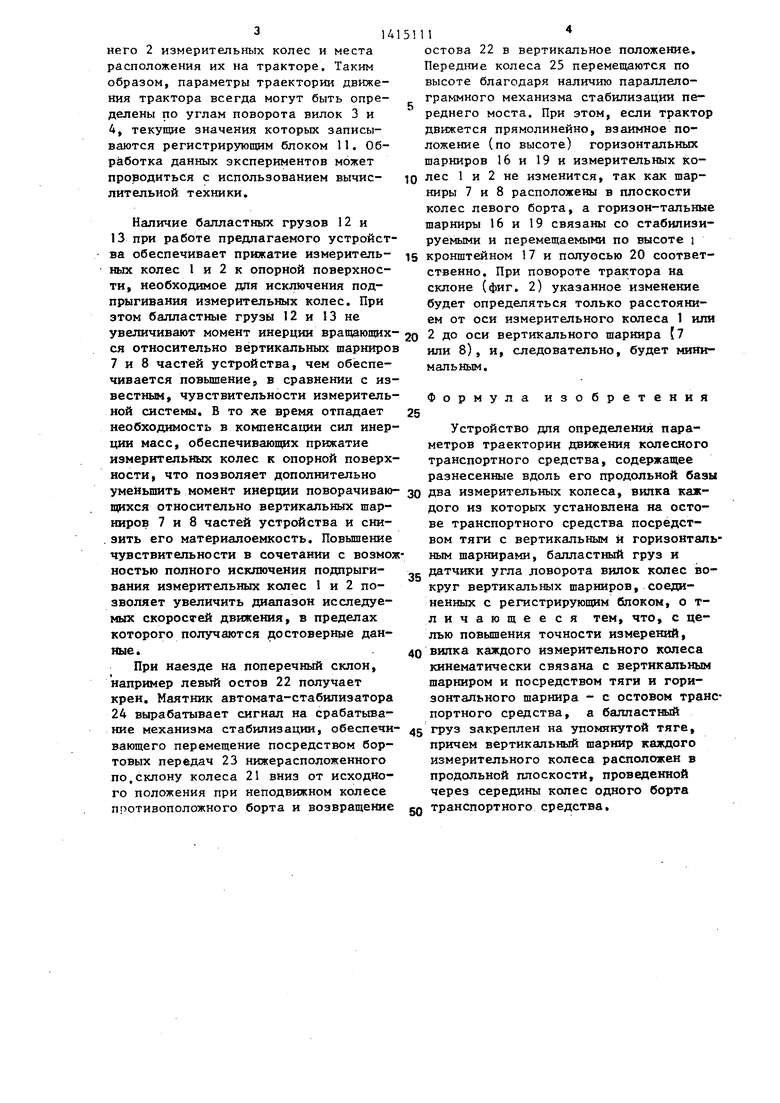
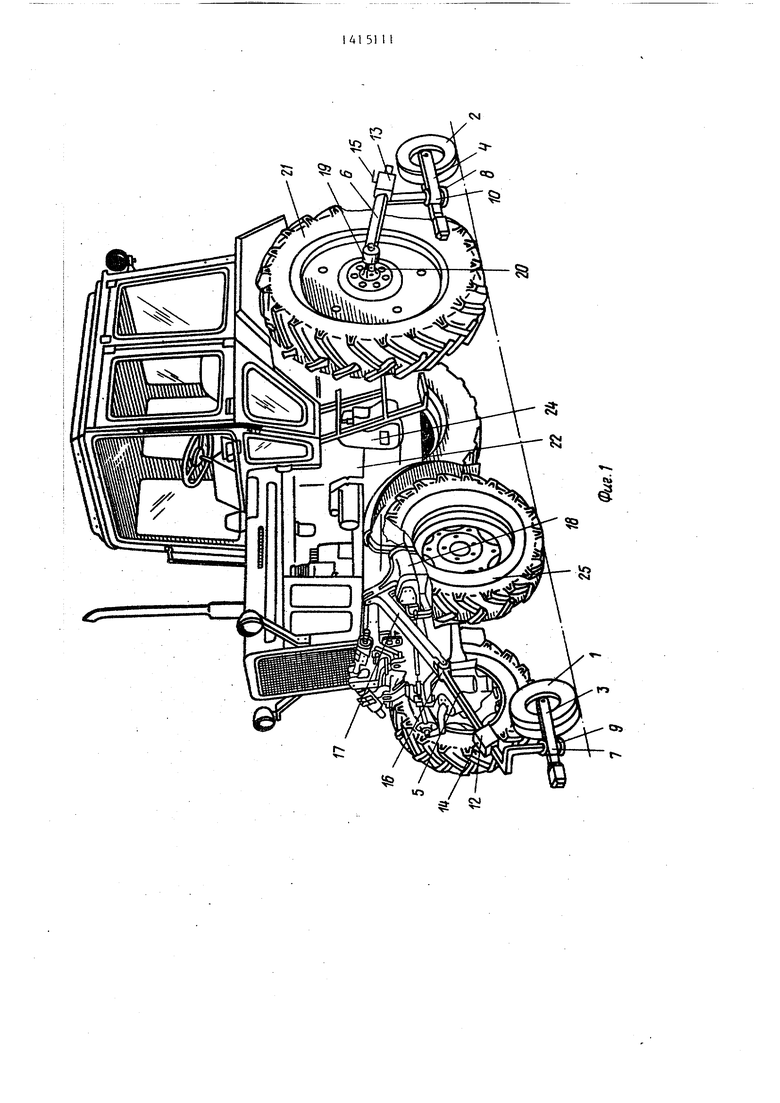
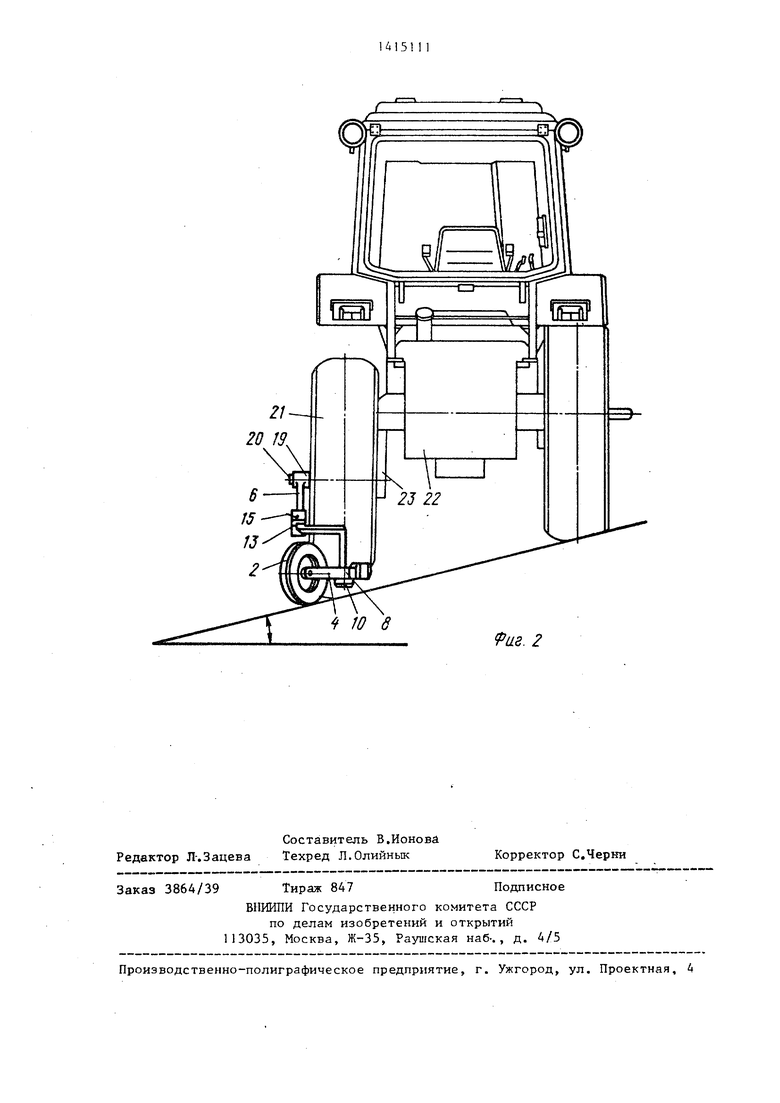
На фиг. I показана установка устройства для определения параметров траектории транспортного средства на тракторе в аксонометрии; на фиг.2 - ;то же, вид сзади; на фиг. 3 - принцип jработы устройства на повороте. I Устройство для определения пара- I метров траектории движения колесного транспортного средства содержит ле- реднее 1 и заднее 2 измерительные |колеса, разнесенные вдоль продольной
1базы транспортного средства (фиг. 1 |и 2). Измерительные колеса 1 и 2 ус- |тановлены в вилках 3 и 4, которые |установлены на тягах 5 и 6 посредством вертикальных шарниров 7 и 8 и связаны с датчиками 9 и 10 поворота вилок 3 и 4 относительно тяг 5 и 6. Вертикальные шарниры 7 и 8 проходят через центры масс каждой измерительной вилки с колесом. Датчики 9 и 0 соединены с регистрирующим блоком 11 (фиг. 3). На тягах 5 и 6 установлены балластные грузы 12 и 13, которые могут перемещаться вдоль тяг и фиксируются винтами 14 и 15.
Тяга 5 переднего измерительного колеса 1 с помощью горизонтального шарнира 16 установлена на кронштейне 17 редуктора 18 параллелограмного механизма стабилизации переднего моста трактора ,(фиг. I). Такая установка тяги 5 обеспечивает постоянное горизонтальное положение шарнира 16. Тяга 6 заднего измерительного колеса
2установлена с помотцью горизонтального шарнира 19 на полуоси 20 задне- го ведущего колеса 21, Задние вецуш е колеса снабжены механизмом их перемещения по высоте, выполненным в виде установленных с возможностью поворота на остове 22 бортовых передач 23, снабженных приводом поворота от гид- роцклиндров (не показаны), управляемых автоматом-стабилизатором 24 маятникового типал установленным на остове 22 трактора.
Шарниры 7 и 8 установлены в пло костях вращения переднего 25 и заднего 21 колес одного борта, например левого, в положении этих колес, соот,
,.-
ветствующем прямолинейному движению. Этим обеспечивается минимальное изменение положения измерительных колес 1 и 2 относительно горизонтальных шарниров 16 и 19 при повороте трактора на склоне, вследствие чего искажение сигнала датчиков 9 и 10 на склоне будет минимальным. Для удобства обработки результатов испытаний желательно устанавливать одинаковую колею передних 25 и задних 21 ведущих колес трактора (фиг. 1).
Устройство для определения параметров траектории движения колесного транспортного средства работает следующим образом.
При прямолинейном движении (фиг.1) измерительные колеса 1 и 2 располагаются в плоскости колес левого борта трактора. Это положение соответствует нулевому показанию датчиков 9 и 10 поворота вилок 3 и 4 измерительных колес и 2 вокруг вертикальных шарниров 7 и 8. Появление отклонения измерительных колес 1 и 2 от этого исходного положения при неизменном положении управляемых передних колес 25 трактора свидетельствует о действии боковых сил на трактор, т.е. о возникновении бокового увода колес трактора. При этом показания датчиков 9 и 10, регистрируемые блоком 11, используются для нахождения углов увода колес переднего и заднего мостов трактора. Таким образом, предлагаемое устройство можно использовать для исследования устойчивости прямолинейного движения колесного транспортного средства.
При повороте трактора передние управляемые колеса 25 поворачиваются на некоторый угол, вследствие чего трактор движется по траектории радиуса R. При этом вилки 3 и 4 измерительных- колес 1 и 2 отклоняются от исходного положения. Радиус поворота R однознач но зависит от углов поворота вилок 3 и 4 и места расположения вертикальных шарниров 7 и 8 на тракторе.
При наличии бокового увода центр поворота трактора смещается относи- тепьно оси задних колес на величину Е (фиг, 3), причем радиус поворота R увеличивается, В этом случае величины R, Е и углы увода колес передне- го и заднего мостов также однозначно зависят от изменившихся углов отклонения вилок 3 и 4 переднего 1 и зад3 14151П
него 2 измерительных колес и местаостова 22 в вертикальное положение,
расположения их на тракторе. ТакимПередние колеса 25 перемещаются по
образом, параметры траектории движе-высоте благодаря наличию параплелония трактора всегда могут быть опре-граммного механизма стабилизации педелены по углам поворота вилок 3 и реднего моста. При этом, если трактор
4, текущие значения которых записы-движется прямолинейно, взаимное поваются регистрирующим блоком 11, Об-ложение (по высоте) горизонтальных
работка данных экспериментов можетшарниров 16 и 19 и измерительных копрородиться с использованием вычис-ю 1 и 2 не изменится, так как шарлительной техники.виры 7 и 8 расположены в плоскости
колес левого борта, а горизон-тапьные
Наличие балластных грузов 12 ишарниръ 16 и 19 связаны со стабилизи- 13 при работе предлагаемого устройст-руемнми и перемещаемыми по высоте i ва обеспечивает прижатие измеритель- 5 крошптейном 17 и полуосью 20 соответ- ных колес 1 и 2 к опорной поверхнос-ственно. При повороте трактора на ти, необходимое дпя исключения под-склоне (фиг. 2) указанное изменение прыгиваиня измерительных колес. Прибудет определяться только расстояни- этом балластные грузы 12 и 3 неем от оси измерительного колеса 1 или увеличивают момент инерции вращающих-go 2 до оси вертикального шарнира {7 ся относительно вертикальных шарнировили 8), и, следовательно, будет мини- 7 и В частей устройства, чем обёспе-мальным. чивается повьшение, в сравнении с известным, чувствительности измеритель-Формула изобретения ной системы. В то же время отпадает25
необходимость в компенсации сил инер-Устройство дпя определения парации масс, обеспечивающих прижатиеметров траектории движения колесного
измерительных колес к опорной поверх-транспортного средства, содержащее
ности, что позволяет дополнительноразнесенные вдоль его продольной базы
уменьшить момент инерции поворачиваю-зо два измерительных колеса, вилка кажщихся относительно вертикальных шар-дого из которых установлена на осте-
ниров 7 и 8 частей устройства и сни-ве транспортного средства посрёдст. зить его материалоемкость. Повышениевом тяги с вертикальным и горизонталь- чувствительности в сочетании с возмож- ным шарнирами, балластный груз и
ностью полного исключения подпрыги-датчики угла ловорота вилок колес вования измерительных колес 1 и 2 по-круг вертикальных шарниров, соеди-
зволяет увеличить диапазон исследуе-нениых с регистрирующим блоком, о тмых скоростей движения, в пределахличающееся тем, что, с цекоторого получаются достоверные дан-лью повышения точности измерений,
ные. .40 вилка каждого измерительного колеса
При наезде на поперечный склон,кинематически связана с вертикальным
например левый остов 22 получаетшарниром и посредством тяги и горикрен. Маятник автомата-стабилизаторазонтального шарнира - с остовом транс24 вырабатывает сигнал на срабатьюа-портного средства, а балластный
ние механизма стабилизации, обеспечи-45 закреплен на упомянутой тяге,
вающего перемещение посредством бор-причем вертикальный шарнир каждого
товых передач 23 нижерасположенногоизмерительного колеса расположен в
по,склону колеса 21 вниз от исходно-продольной плоскости, проведенной
го положения при неподвижном колесечерез середины колес одного борта
противоположного борта и возвращениеgQ транспортного средства.
Ри.г. 2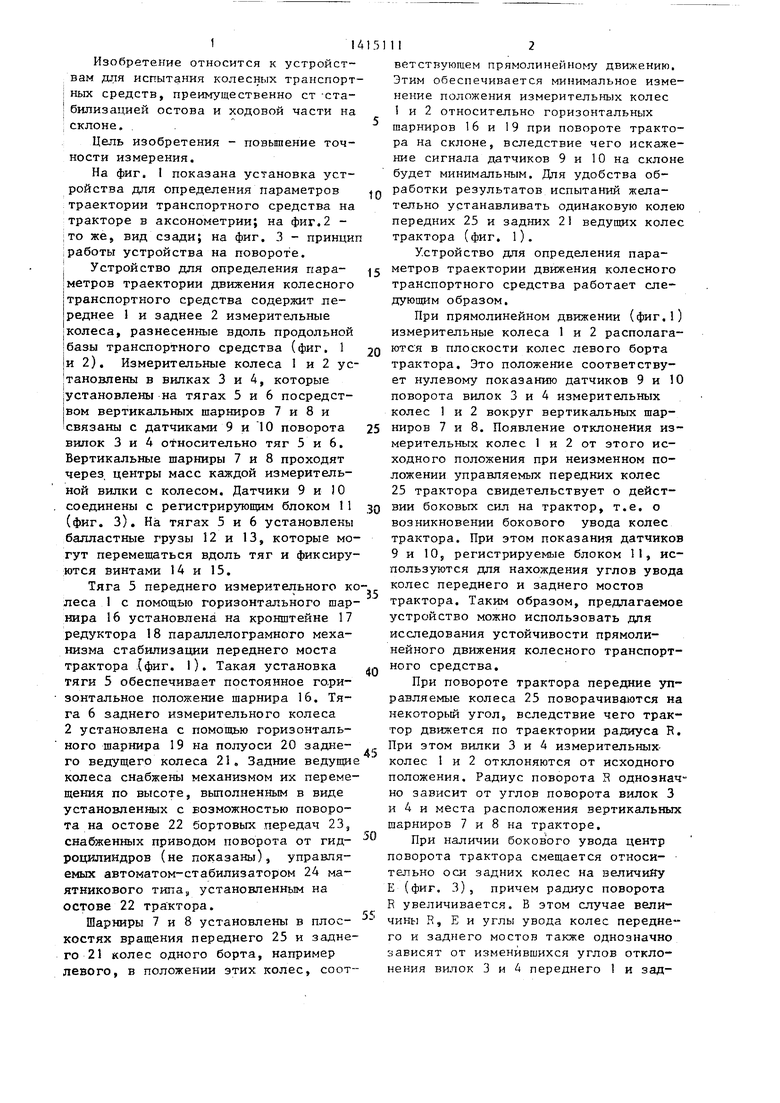
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ повышения устойчивости крутосклонного колесного транспортного средства при движении на наклонной поверхности и устройство для его осуществления | 1978 |
|
SU867704A1 |
| Транспортное средство для работы на склонах | 1982 |
|
SU1133126A1 |
| ТРАКТОР ДЛЯ РАБОТЫ НА СКЛОНЕ | 1991 |
|
RU2045437C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ ДВИЖУЩЕГОСЯ КОЛЁСНОГО ТРАНСПОРТНОГО СРЕДСТВА НА НАКЛОННОЙ ОПОРНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2585203C1 |
| Крутосклонный колесный трактор | 1975 |
|
SU695854A1 |
| Трактор для работы на склоне | 1989 |
|
SU1726289A1 |
| Крутосклонный трактор со всеми управляемыми колесами | 1975 |
|
SU648461A1 |
| Подвеска задних колес крутосклонного трактора | 1990 |
|
SU1713839A1 |
| Колесное транспортное средство для работы на склонах | 1987 |
|
SU1463523A1 |
| Транспортное средство повышенной проходимости | 1987 |
|
SU1458252A1 |
Изобретение относится к устройствам для испытания колесных транспортных средств преимущественно со стабилизацией остова и ходовой части на склоне. Цель изобретения - повышение точности измерения. Устройство содержит переднее 1 и заднее 2 измерительные колеса, установленные в вилках 3 и 4, которые посредством тяг 5 и 6, вертикальных шарниров 7 и 8 и горизонтальных шарниров 16 и 19 соединены с остовом транспортного средства. При прямолинейном движении транспортного средства измерительные колеса 1 и 2 располагаются в плоскости колес одного из бортов транспортного средства, а при его повороте вилки 3 и 4 переднего 1 и заднего 2 колес поворачиваются и при помощ датчиков поворота данные по углу поворота .поступают в регистрирукяций вяок 11. 3 ил. с € Q}Ul3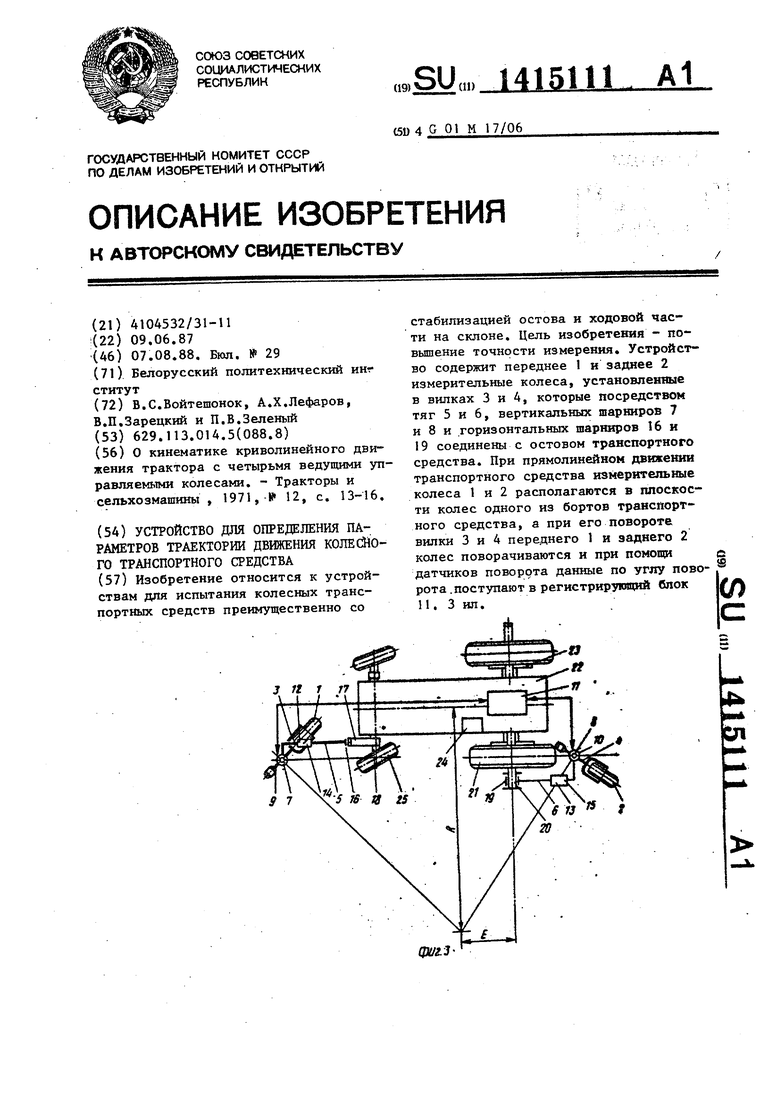
| О кинематике криволинейного движения трактора с четырьмя ведущими управляемыми колесами | |||
| - Тракторы и сельхозмашины, 1971, Н 12, с | |||
| Насос | 1917 |
|
SU13A1 |
