Ссылки на родственные заявки
Настоящая заявка представляет собой продолжение международной заявки на патент № PCT/CN2012/074034, зарегистрированной 14 апреля 2012 г. под названием «Способ и устройство для управления скоростью двигателя и техническое устройство с выносной стрелой» на имя Xiaogang и др., которая в свою очередь испрашивает приоритет по китайской заявке на патент №2011101771915.0, зарегистрированной 28 июня 2011 г. под названием «Способ и устройство для управления скоростью двигателя и техническое устройство с выносной стрелой», на имя Xiaogang и др., и содержание которых в полном объеме включено в настоящую заявку посредством ссылки.
Область техники
Данное изобретение в целом относится к области технических устройств с выносной стрелой и, в частности, относится к способу управления скоростью двигателя, используемому для управления выходной скоростью двигателя технического устройства с выносной стрелой при работе стрелы, к устройству управления скоростью двигателя и к техническому устройству с выносной стрелой, содержащему устройство управления скоростью двигателя.
Уровень техники
Транспортное средство с насосом для подачи бетона представляет собой обычное техническое устройство с выносной стрелой. Такое транспортное средство широко используют в современном городском и дорожном строительстве, а также в строительстве для оборонных нужд. Экономические характеристики транспортного средства с насосом для подачи бетона непосредственно влияют на стоимость строительства и степень загрязнения окружающей среды. Поскольку в настоящее время стали общепризнанными идеи экономии энергии и защиты окружающей среды, все более популярными становятся высокоэффективные, экономичные и дружественные для окружающей среды транспортные средства с насосом для подачи бетона.
В транспортном средстве с насосом для подачи бетона силовая установка передает мощность двигателя к блоку гидравлического насоса через раздаточную коробку для передачи мощности, причем часть гидравлического масла для гидравлических устройств, выходящая из гидравлического насоса, приводит в действие бетононасос, а другая часть гидравлического масла для гидравлических устройств используется для приведения в действие секций стрелы, составляющих выносную стрелу, с целью выполнения операции.
Обычно при выполнении операции стрелой транспортного средства с насосом для подачи бетона режим управления силовой установкой двигателя вынуждает двигатель выполнять поворот с номинальной скоростью. При таком режиме управления обеспечена возможность подачи достаточной мощности при одновременном выполнении требования о максимальном потоке во время операций стрелы, а отсутствие необходимости согласования мощностей и потоков делает способ управления простым и надежным.
В таком режиме управления силовой установкой двигателя скорость двигателя установлена равной номинальной скорости, резервирование мощности вполне достаточное и оборудование работает в области высокого потребления масла вместо работы в области экономичного потребления, что ухудшает экономические показатели силовой установки с ходовой частью.
Кроме того, стрела транспортного средства с насосом для подачи бетона находится в рабочем состоянии с низкой нагрузкой. При работе двигателя с номинальной скоростью имеет место чрезмерное потребление мощности в виде вибраций, соударений и шумов, что в долгосрочной перспективе приводит к серьезным энергетическим потерям.
Поэтому при современном уровне техники существует до сих пор не нашедшая разрешения задача устранения вышеупомянутых недостатков и несоответствий.
Раскрытие изобретения
Первая цель настоящего изобретения состоит в разработке способа управления скоростью двигателя, предназначенного для управления выходной скоростью двигателя технического устройства с выносной стрелой при работе стрелы таким образом, чтобы двигатель всегда работал в области высокоэффективного использования топлива. Вторая цель настоящего изобретения состоит в получении устройства управления скоростью двигателя. Третья цель настоящего изобретения состоит в получении технического устройства с выносной стрелой, содержащего устройство управления скоростью двигателя.
Для реализации первой цели в соответствии с настоящим изобретением предложен способ управления скоростью двигателя, предназначенный для управления выходной скоростью двигателя технического устройства с выносной стрелой при работе стрелы, включающий следующие этапы:
этап A: измерение давления нагрузки гидравлического устройства и скорости перемещения стрелы;
этап B: определение центральным блоком управления целевой скорости двигателя согласно давлению нагрузки и скорости перемещения стрелы;
этап C: пересылка центральным блоком управления значения целевой скорости двигателя в блок управления двигателем, и
выполнение блоком управления двигателя регулировки скорости средствами обратной связи в соответствии с текущим значением скорости, возвращаемой двигателем так, что текущая скорость двигателя оказывается согласованной с целевой скоростью двигателя.
Согласно одному варианту реализации настоящего изобретения этап В включает вычисление центральным блоком первоначальной управляемой скорости двигателя, согласующую давление нагрузки и скорость перемещения стрелы согласно модели согласования мощности и модели согласования потока, и определение целевой скорости двигателя согласно первоначальной управляемой скорости.
Согласно одному варианту реализации настоящего изобретения целевая скорость двигателя является первоначальной управляемой скоростью двигателя, или центральный блок управления получает сегментную скорость двигателя, соответствующую первоначальной управляемой скорости двигателя, а целевая скорость двигателя равна сегментной скорости двигателя.
В одном варианте реализации настоящего изобретения давление нагрузки измерено посредством использования датчика давления, размещенного в гидравлическом устройстве.
В одном варианте реализации настоящего изобретения скорость перемещения стрелы выражена через амплитуду штанги толкателя и сдвиг устройства дистанционного управления стрелой.
В одном варианте реализации настоящего изобретения первоначальная управляемая скорость двигателя, давление нагрузки и амплитуда штанги толкателя удовлетворяют зависимости: n=f (P, q, T0, T1…, Tn), где n - первоначальная управляемая скорость двигателя, P - давление нагрузки, q - объемная производительность гидравлического насоса, T0 - амплитуда штанги толкателя, соответствующая поворотной стреле, T1 - амплитуда штанги толкателя, соответствующая первой секции стрелы, и Tn - амплитуда штанги толкателя, соответствующая n-й секции стрелы.
Способ управления скоростью двигателя согласно одному варианту реализации настоящего изобретения включает следующие этапы: измерение давления нагрузки гидравлического устройства и измерение скорости перемещения стрелы; определение центральным блоком управления целевой скорости двигателя согласно указанному давлению и скорости перемещения стрелы; пересылка центральным блоком управления значения целевой скорости двигателя в блок управления двигателем и выполнение блоком управления двигателем регулировки средствами обратной связи согласно текущему значению скорости, возвращаемой двигателем так, что текущее значение скорости двигателя оказывается согласованным с целевой скоростью двигателя.
Согласно способу управления скоростью двигателя осуществляют прием сигнала о давлении нагрузки гидравлического устройства и сигнала о скорости действия стрелы; вычисление оптимальной скорости двигателя, удовлетворяющей требованию к потоку мощности стрелы и требованию к выходной мощности двигателя; установление оптимальной скорости двигателя в качестве целевой скорости двигателя; ввод целевой скорости двигателя в блок управления двигателем; пересылка в центральный блок управления в режиме реального времени значения текущей скорости, возвращаемой двигателем; и реализация этим блоком пропорционально-интегрально-дифференциального управления с замкнутым циклом согласно значению текущей скорости, возвращаемой двигателем так, что текущая скорость двигателя равна установленной целевой скорости двигателя.
Такой способ управления скоростью двигателя может выполнять подачу энергии по требованию силовой установки при работе стрелы так, что двигатель всегда работает в области высокоэффективного использования топлива, чрезмерные потери энергии не происходят и очевидным образом уменьшены соударения, шумы и износ устройства. Кроме того, этот способ управления скоростью двигателя может обеспечить подачу питающего потока по требованию гидравлического устройства при работе стрелы и избежать потерь вследствие переполнения. Кроме того, указанный способ управления скоростью двигателя может в режиме реального времени выполнять автоматическую регулировку скорости двигателя в соответствии с изменениями давления нагрузки, и работой стрелы при ее работе так, что повышается степень автоматизации и адаптируемость.
Согласно одному варианту реализации настоящего изобретения центральный блок управления вычисляет первоначальную управляемую скорость двигателя, согласуя давление нагрузки и скорость перемещения стрелы согласно модели согласования мощности и модели согласования потока. Центральный блок управления получает значение сегментной скорости двигателя, соответствующей первоначальной управляемой скорости двигателя, а сегментная скорость двигателя представляет собой целевую скорость двигателя.
Согласно требованиям к непрерывности и стабильности при работе стрелы, поток жидкости для гидравлических механизмов, предназначенный для управления работой стрелы, должен быть однородным и непрерывным. Первоначальная управляемая скорость двигателя представляет собой оптимальную скорость в режиме реального времени и является величиной, претерпевающей изменения в режиме реального времени. Для обеспечения непрерывности и стабильности работы стрелы сегментная скорость двигателя установлена в соответствии с первоначальной управляемой скоростью двигателя, претерпевающей изменение в режиме реального времени. Сегментная скорость двигателя образована из множества различных и непрерывных сегментов скорости. Каждый сегмент скорости имеет устойчивую величину скорости, а сегментная скорость двигателя использована в качестве целевой скорости двигателя для обеспечения непрерывности потока и стабильности выходной мощности двигателя при работе стрелы.
Для реализации второй цели согласно настоящему изобретению предложено устройство управления скоростью двигателя, содержащее центральный блок управления и блок управления двигателем. При работе центральный блок управления получает значения давления нагрузки гидравлического устройства и скорости перемещения стрелы и определяет целевую скорость двигателя согласно значениям указанного давления нагрузки и скорости стрелы. Центральный блок управления пересылает значение целевой скорости двигателя в блок управления двигателем, а блок управления двигателем выполняет регулировку скорости средствами обратной связи согласно текущему значению скорости, возвращаемой двигателем так, что текущая скорость двигателя оказывается согласованной с целевой скоростью двигателя.
Согласно одному варианту реализации настоящего изобретения устройство дополнительно содержит датчик давления, используемый для измерения давления нагрузки гидравлического устройства, причем датчик давления размещен в гидравлическом устройстве.
Устройство управления скоростью двигателя согласно одному варианту реализации настоящего изобретения содержит центральный блок управления и блок управления двигателем. Центральный блок управления получает значения давления нагрузки гидравлического устройства и скорости перемещения стрелы и определяет целевую скорость двигателя согласно указанным значениям давления нагрузки и скорости стрелы. Центральный блок управления пересылает значение целевой скорости двигателя в блок управления двигателем. Блок управления двигателем выполняет регулировку скорости средствами обратной связи согласно текущему значению скорости, возвращаемой двигателем так, что текущая скорость двигателя оказывается согласованной с целевой скоростью двигателя.
Такое устройство управления скоростью двигателя может выполнять подачу энергии по требованию силовой установки при работе стрелы так, что двигатель всегда работает в области высокоэффективного использования топлива, чрезмерные потери энергии не происходят и очевидным образом уменьшаются соударения, шумы и износ устройства. Такой способ управления скоростью двигателя может также обеспечить подачу питающего потока по требованию гидравлического устройства при работе стрелы и избежать потерь вследствие переполнения. Кроме того, указанный способ управления скоростью двигателя может в режиме реального времени выполнять автоматическую регулировку скорости двигателя в соответствии с изменениями давления нагрузки и работой стрелы при ее работе так, что повышается степень автоматизации и адаптируемость.
Для реализации третьей цели согласно настоящему изобретению предложено техническое устройство с выносной стрелой. Техническое устройство с выносной стрелой содержит устройство управления скоростью двигателя. Поскольку устройство управления скоростью двигателя обладает раскрытыми выше техническими преимуществами, техническое устройство с выносной стрелой, содержащее устройство управления скоростью двигателя, также обладает соответствующими техническими преимуществами.
В одном варианте реализации настоящего изобретения техническое устройство с выносной стрелой представляет собой транспортное средство с насосом для подачи бетона, распределитель бетонной смеси, вездеходный подъемный кран или автокран.
Эти и другие аспекты настоящего изобретения станут очевидными из последующего описания предпочтительного варианта реализации настоящего изобретения, рассматриваемого вместе с последующими чертежами, при этом могут быть произведены изменения и модификации без отступления от сущности и объема настоящего изобретения.
Краткое описание чертежей
Прилагаемые чертежи поясняют один или несколько вариантов реализации настоящего изобретения и вместе с письменным описанием предназначены для объяснения сущности изобретения. Везде, где это возможно, одинаковые позиционные обозначения использованы для обозначения одних и тех же или аналогичных элементов варианта реализации настоящего изобретения.
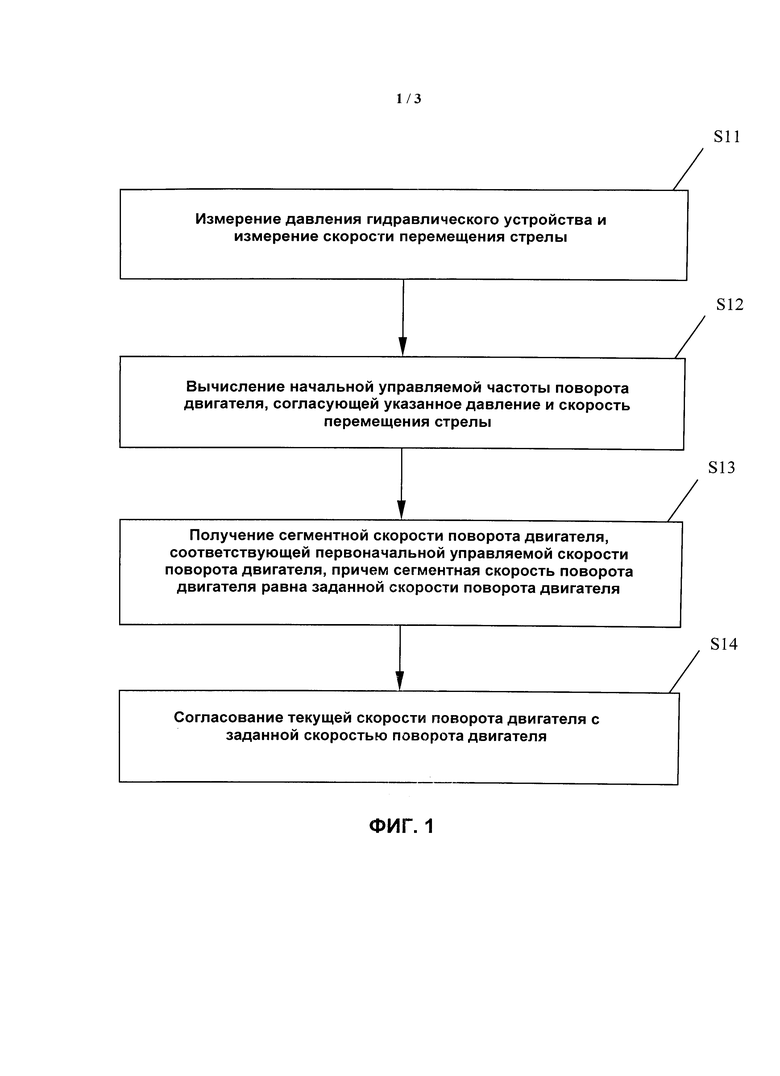
На фиг. 1 показана блок-схема способа управления скоростью двигателя согласно одному варианту реализации настоящего изобретения.
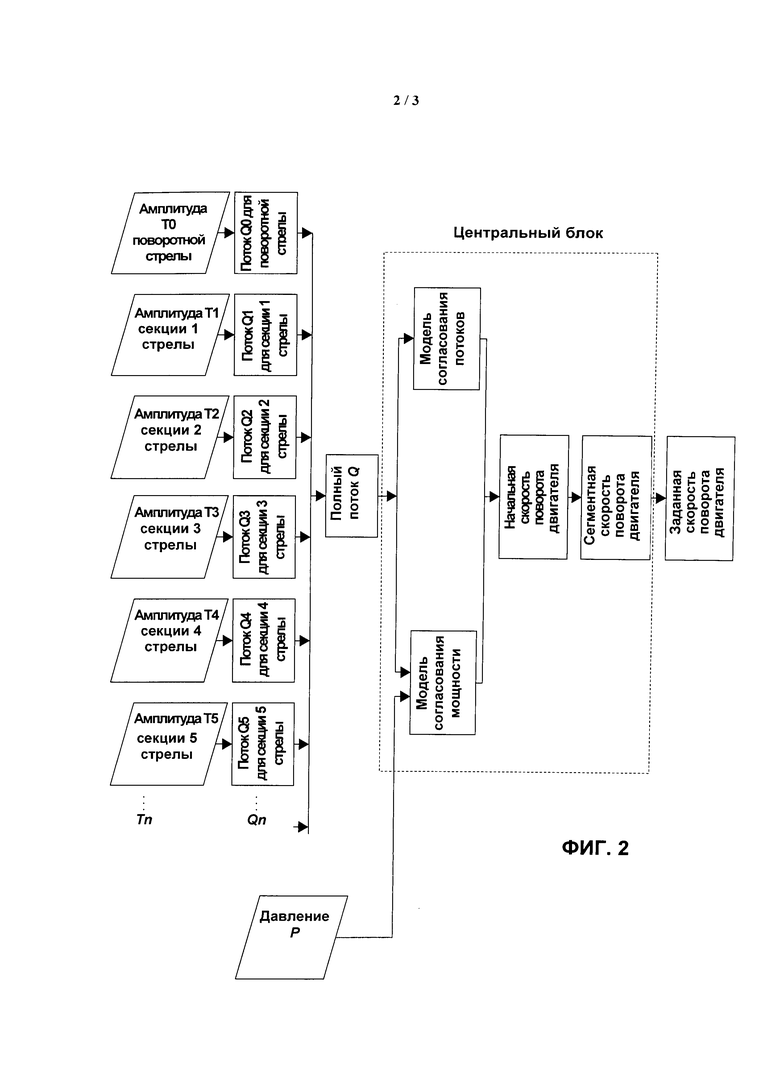
На фиг. 2 схематически показана диаграмма принципа управления согласно способу управления скоростью двигателя, показанному на фиг. 1.
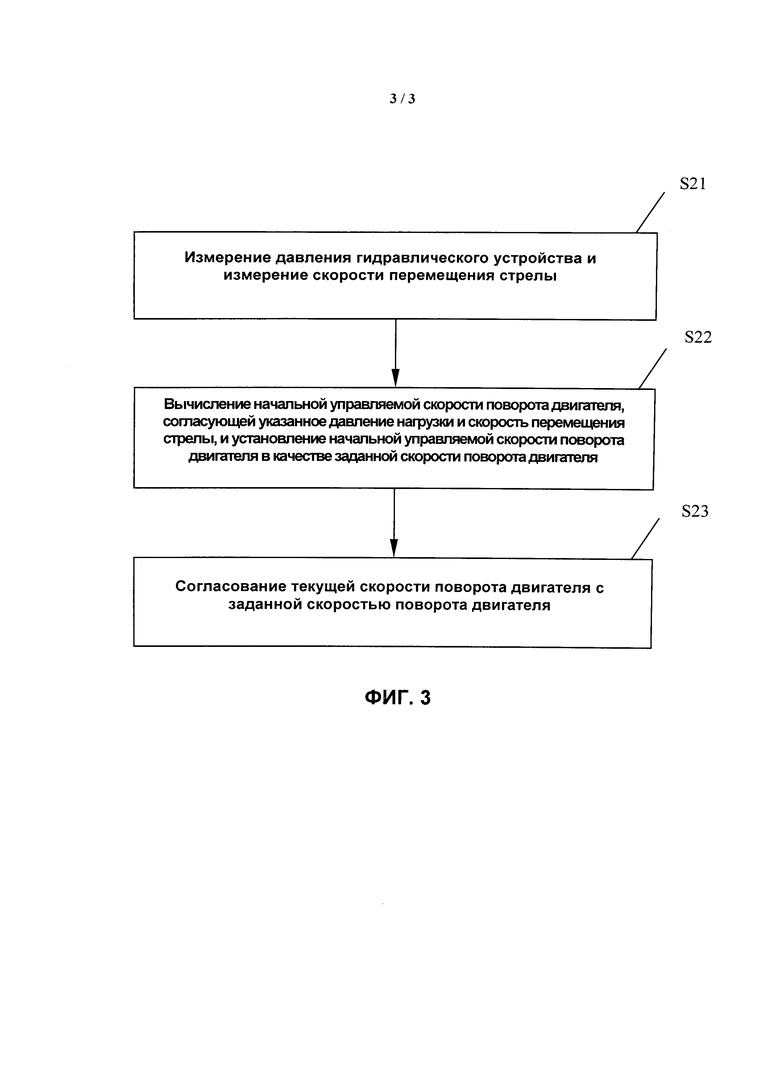
На фиг. 3 показана блок-схема способа управления скоростью двигателя согласно другому варианту реализации настоящего изобретения.
Подробное описание изобретения
Настоящее изобретение будет ниже описано более подробно со ссылками на сопроводительные чертежи, на которых показаны варианты реализации настоящего изобретения. Однако настоящее изобретение может быть реализовано во многих различных формах и не должно быть ограничено сформулированными здесь вариантами реализации. Скорее эти варианты реализации настоящего изобретения предназначены для тщательного и полного раскрытия и полностью описывают объем изобретения для специалистов в данной области техники. Одинаковые позиционные обозначения повсюду относятся к одинаковым элементам.
Следует иметь в виду, что упоминание о размещении элемента «на» другом элементе указывает на то, что он может быть размещен непосредственно на другом элементе или между ними могут быть размещены промежуточные элементы. Напротив, упоминание о размещении элемента «непосредственно на» другом элементе указывает на то, что нет никаких промежуточных элементов. Использованный здесь термин «и/или» включает любые и все комбинации одного или нескольких связанных перечисленных элементов.
Следует иметь в виду, что хотя термины «первый, второй, третий и т.д.» могут быть использованы здесь для описания различных элементов, компонентов, участков, слоев и/или секций, эти элементы, компоненты, участки, слои и/или секции не должны быть ограничены этими терминами. Эти термины использованы лишь для отличия одного элемента, компонента, участка, слоя или секции от другого элемента, компонента, участка, слоя или секции. Таким образом, первый элемент, компонент, участок, слой или первую секцию, описанные ниже, можно назвать вторым элементом, компонентом, участком, слоем или второй секцией, не отступая от сути настоящего изобретения.
Используемая здесь терминология предназначена лишь для описания отдельных вариантов реализации настоящего изобретения и не предназначена для ограничения изобретения. Использованные здесь существительные единственного числа также включают существительные множественного числа, если контекст ясно не указывает на иное. Кроме того, следует иметь в виду, что использованные термины «включает» и/или «включающий», или «содержит» и/или «содержащий», или «имеет» и/или «имеющий» указывают на наличие указанных особенностей, участков, целых узлов, стадий, этапов, элементов и/или компонентов, но не исключают наличие или добавление одной или нескольких других особенностей, участков, целых узлов, стадий, этапов, элементов, компонентов и/или их групп.
Кроме того, относительные термины, такие как «нижний», «верхний» и «передний» или «задний», могут быть использованы здесь для описания связи одного элемента с другим элементом, как показано на фигурах. Следует иметь в виду, что относительные термины предназначены для описания различных ориентации устройства в дополнение к ориентации, показанной на фигурах. Например, при перевернутой ориентации устройства на одной из фигур элементы, описанные как «нижние» относительно других элементов, были бы затем размещены на «верхних» сторонах других элементов. Поэтому образцовый термин «ниже» может охватывать и ориентацию «ниже» и «выше», в зависимости от определенной ориентации фигуры. Аналогичным образом, при перевернутой ориентации устройства на одной из фигур элементы, описанные как размещенные «ниже» или «под» другими элементами, были бы затем размещены «над» другими элементами. Таким образом, образцовые термины «ниже» или «под» могут охватывать ориентацию и выше и ниже.
Если не определено иначе, то все используемые здесь термины (включая технические и научные термины) имеют значение, обычно используемое специалистами в области техники, к которой принадлежит настоящее изобретение. Кроме того, следует иметь в виду, что термины, например, термины, определенные в обычно используемых словарях, должны быть интерпретированы как имеющие значение, согласное с их значением в контексте соответствующей области техники и настоящего раскрытия, и не должны быть интерпретированы в идеализированном или чрезмерно формальном смысле, если только они явно не определены здесь таким образом.
Использованные термины «около», «примерно» или «приблизительно» означают точность в пределах 20 процентов, предпочтительно в пределах 10 процентов, и еще предпочтительнее в пределах 5 процентов от данной величины или диапазона. Приводимые здесь численные значения приблизительны, что означает, что термины «около», «примерно» или «приблизительно» могут быть подразумеваемы при отсутствии их явной формулировки.
Описание будет проведено относительно вариантов реализации настоящего изобретения в сочетании с сопроводительными чертежами, представленными на фиг. 1-3. В соответствии с целями настоящего изобретения, сформулированными и подробно описанными здесь, настоящее изобретение, в одном своем аспекте, относится к способу управления скоростью двигателя, используемому для управления выходной скоростью двигателя технического устройства с выносной стрелой при работе стрелы, к устройству управления скоростью двигателя и к техническому устройству с выносной стрелой, содержащему устройство управления скоростью двигателя.
На фиг. 1 показана блок-схема способа управления скоростью двигателя, предназначенного для управления выходной скоростью двигателя технического устройства с выносной стрелой при работе стрелы согласно одному варианту реализации настоящего изобретения, в то время как на фиг. 2 схематически показана диаграмма принципа управления согласно способу управления скоростью двигателя, показанному на фиг. 1.
В этом приводимом в качестве примера варианте реализации настоящего изобретения способ управления скоростью двигателя включает следующие этапы.
Этап S11: измерение давления нагрузки гидравлического устройства и измерение скорости перемещения стрелы.
В одном варианте реализации настоящего изобретения датчик давления может быть размещен в трубопроводе гидравлического устройства. Измерение давления P нагрузки гидравлического устройства выполнено датчиком давления, и датчик давления посылает сигнал о значении давления в центральный блок управления.
В одном варианте реализации настоящего изобретения скорость перемещения стрелы может быть получена на основании данных об амплитуде штанги толкателя и сдвиге устройства дистанционного управления стрелой. Значение амплитуды штанги толкателя устройства дистанционного управления стрелой вручную вводится оператором. Контроллер может преобразовать величину амплитуды штанги толкателя в процент от значения амплитуды, чтобы отразить влияние ввода команды оператором на скорость перемещения стрелы, то есть величина амплитуды штанги толкателя соответствующей стрелы при дистанционном управлении стрелой соответствует скорости перемещения стрелы. Значение сдвига выбрано посредством регулировочного сдвига, предназначенного для работы со скоростью перемещения стрелы при дистанционном управлении стрелой. Значение сдвига и вручную введенное значение амплитуды штанги толкателя могут совместно отражать ввод команды оператором относительно скорости перемещения стрелы. Амплитуда штанги толкателя, соответствующая поворотной стреле (показанная как «Амплитуда T0 для поворотной стрелы» на фиг. 2), обозначена T0, амплитуда штанги толкателя, соответствующая первой секции стрелы (показанная как «Амплитуда T1 для секции 1 стрелы» на фиг. 2), обозначена T1, и амплитуда штанги толкателя, соответствующая n-й секции стрелы, обозначена Tn.
Этап S12: центральный блок управления вычисляет начальную управляемую скорость двигателя, согласующую давление нагрузки и скорость перемещения стрелы согласно модели согласования мощности и модели согласования потока.
Модель согласования мощности:
Согласно испытаниям характеристик двигателя может быть получена зависимость между мощностью, скоростью и расходом горючего в установившемся режиме работы двигателя. Посредством анализа может быть найдена оптимальная с точки зрения эффективности рабочая скорость при различных значениях мощности. Функциональная зависимость между мощностью и оптимальной с точки зрения эффективности рабочей скоростью имеет следующий вид:

где n1 представляет собой оптимальную с точки зрения эффективности рабочую скорость и Ne представляет собой мощность.
Соотношение между давлением нагрузки, потоком и мощностью может быть получено согласно зависимости, описывающей передачу мощности:

где Ne - мощность, P - давление нагрузки и Q - поток.
Посредством комбинации уравнений (1) и (2) может быть получена зависимость между оптимальной с точки зрения эффективности рабочей скоростью, давлением нагрузки и потоком:

Модель согласования потока:
Посредством испытаний гидравлического устройства стрелы может быть получена взаимосвязь между различными амплитудами штанги и потоком в устройстве при каждой операции стрелы:



где Q0 - поток для поворотной стрелы, Q1 - поток для секции 1 стрелы и Qn - поток для n-ой секции стрелы.
Требование к полному потоку при работе конструкции стрелы имеет вид:

Зависимость между требованием к полному потоку и амплитудой штанги толкателя во время работы стрелы имеет вид:

Зависимость между величиной потока, объемной производительностью гидравлического насоса и скоростью двигателя во время работы стрелы имеет вид:

Посредством комбинации модели согласования мощности с моделью согласования потока может быть получена зависимость между скоростью n поворота двигателя, давлением P нагрузки, объемной производительностью q гидравлического насоса и амплитудами штанги толкателя, соответствующими каждой секции стрелы при дистанционном управлении стрелой:

Первоначальная управляемая скорость двигателя, согласованная со значением давления нагрузки, и скорость стрелы могут быть вычислены посредством уравнения (10).
Этап S13: центральный блок управления получает сегментную скорость двигателя, соответствующую первоначальной управляемой скорости двигателя, причем сегментная скорость двигателя равна целевой скорости двигателя.
Согласно требованиям к непрерывности и стабильности при работе стрелы, поток жидкости для гидравлических механизмов, предназначенный для управления работой стрелы, должен быть однородным и непрерывным. Первоначальная управляемая скорость двигателя равна оптимальной скорости в режиме реального времени и представляет собой величину, претерпевающую изменение в режиме реального времени. Для обеспечения непрерывности и стабильности работы стрелы сегментная скорость двигателя установлена в соответствии с первоначальной управляемой скоростью двигателя, претерпевающей изменение в режиме реального времени. Сегментная скорость двигателя образована из множества различных и непрерывных сегментов скорости. Каждый сегмент скорости обладает устойчивой величиной скорости, и сегментная скорость двигателя использована в качестве целевой скорости двигателя для обеспечения непрерывности потока и стабильности выходной мощности двигателя во время работы стрелы.
Этап S14: Центральный блок управления пересылает значение целевой скорости двигателя в блок управления двигателем, а блок управления двигателем выполняет регулировку скорости средствами обратной связи согласно текущему значению скорости, возвращаемой двигателем так, что текущая скорость двигателя оказывается согласованной с целевой скоростью двигателя.
Согласно такому способу управления скоростью двигателя принимаются сигнал о давлении нагрузки гидравлического устройства и сигнал о скорости при работе стрелы; вычисляется оптимальная скорость двигателя, удовлетворяющая требованию к потоку мощности стрелы и требованию к выходной мощности двигателя; оптимальная скорость двигателя устанавливается равной целевой скорости двигателя; целевая скорость двигателя вводится в блок управления двигателем; текущая скорость, возвращаемая двигателем в режиме реального времени, отсылается в центральный блок управления; и блок управления двигателем выполняет пропорционально-интегрально-дифференциальное управление с замкнутым циклом согласно текущей скорости, возвращаемой двигателем, так что текущая скорость двигателя становится равной установленной целевой скорости двигателя.
Такой способ управления скоростью двигателя может реализовать подачу энергии по требованию силовой установки при работе стрелы, так что двигатель всегда работает в области высокоэффективного использования топлива, исключаются чрезмерные потери энергии и уменьшаются соударения, шумы и износ устройства. Кроме того, этот способ управления скоростью двигателя может реализовать подачу потока по требованию гидравлического устройства при работе стрелы, при этом не имеют места потери вследствие переполнения. Кроме того, этот способ управления скоростью двигателя может выполнять автоматическую регулировку скорости двигателя в режиме реального времени в соответствии с изменениями давления нагрузки и работы стрелы при работе стрелы, так что повышается степень автоматизации и адаптируемость.
Согласно этому способу управления скоростью двигателя скорость перемещения стрелы выражена через амплитуду штанги толкателя и сдвиг, соответствующий каждой секции стрелы при дистанционном управлении стрелой. Однако настоящее изобретение не ограничено этим. Скорость перемещения стрелы может быть измерена различными способами. Например, датчик смещения может быть размещен на каждой стреле, и скорость перемещения стрелы может быть измерена датчиком смещения. При перемещении каждой стрелы скорость перемещения стрелы и поток в устройстве удовлетворяют определенной функциональной зависимости и первоначальная управляемая скорость двигателя может все же быть вычислена посредством модели согласования мощности и модели согласования потока.
В этом приводимом в качестве примера варианте реализации настоящего изобретения сегментная скорость двигателя, соответствующая первоначальной управляемой скорости двигателя, установлена в центральном устройстве управления, и сегментная скорость двигателя использована в качестве целевой скорости двигателя. Способ управления скоростью двигателя согласно одному варианту реализации настоящего изобретения не ограничен этим, и первоначальная управляемая скорость двигателя может также быть непосредственно использована в качестве целевой скорости двигателя, что кратко описано в последующем варианте реализации настоящего изобретения.
На фиг. 3 показана блок-схема способа управления скоростью двигателя, то есть управления выходной скоростью двигателя технического устройства с выносной стрелой при работе стрелы, согласно одному варианту реализации настоящего изобретения. Как показано на фиг. 3, способ управления скоростью двигателя, предложенный в этом варианте реализации настоящего изобретения, содержит следующие этапы.
Этап S21: измерение давления нагрузки гидравлического устройства и измерение скорости перемещения стрелы.
Этап S22: центральный блок управления вычисляет начальную управляемую скорость двигателя, согласованную с давлением нагрузки и скоростью перемещения стрелы согласно модели согласования мощности и модели согласования потока, причем первоначальная управляемая скорость двигателя равна целевой скорости двигателя.
Этап S23: центральный блок управления пересылает целевую скорость двигателя в блок управления двигателем. Блок управления двигателем выполняет регулировку скорости средствами обратной связи согласно текущему значению скорости, возвращаемой двигателем так, что текущая скорость двигателя оказывается согласованной с целевой скоростью двигателя.
Остальные специфические подробности аналогичны подробностям вышеупомянутых вариантов реализации настоящего изобретения, показанных на фиг. 1 и 2, и здесь детально не описаны.
Согласно настоящему изобретению также предложено устройство управления скоростью двигателя, которое содержит центральный блок управления и блок управления двигателем. Центральный блок управления получает значения давления нагрузки гидравлического устройства и скорости перемещения стрелы и определяет целевую скорость двигателя согласно значениям давления нагрузки и скорости стрелы. Центральный блок управления пересылает значение целевой скорости двигателя на блок управления двигателем. Блок управления двигателем выполняет регулировку скорости средствами обратной связи согласно текущей величине скорости, возвращенной двигателем, таким образом, чтобы текущая скорость была согласована с целевой скоростью двигателя. Устройство управления скоростью двигателя воспринимает этот способ управления скоростью двигателя, выполняемый в этом варианте реализации настоящего изобретения, в качестве стратегии управления, предназначенной для управления выходной скоростью двигателя технического устройства с выносной стрелой при работе стрелы. Процедуры работы устройства пояснены в вышеупомянутых вариантах реализации настоящего изобретения, показанных на фиг. 1-3, и здесь детально описаны не будут.
В одном варианте реализации настоящего изобретения датчик давления может быть размещен на трубопроводе гидравлического устройства, причем измерение давления P нагрузки гидравлического устройства осуществляется датчиком давления, который посылает сигнал о значении давления в центральный блок управления. Скорость перемещения стрелы может быть выражена исходя из амплитуды штанги толкателя и сдвига устройства дистанционного управления стрелой.
Такое устройство управления скоростью двигателя может выполнить подачу энергии по требованию силовой установки при работе стрелы, так что двигатель всегда работает в области высокоэффективного использования топлива, исключаются чрезмерные потери энергии и уменьшаются соударения, шумы и износ устройства. Кроме того, это устройство управления скоростью двигателя может реализовать подачу потока по требованию гидравлического устройства при работе стрелы, при этом не имеют места потери вследствие переполнения. Устройство управления скоростью двигателя может также выполнять в режиме реального времени автоматическую регулировку скорости двигателя в соответствии с изменениями давления нагрузки и работы стрелы при работе стрелы, так что повышается степень автоматизации и адаптируемость.
Согласно настоящему изобретению также предложено техническое устройство с выносной стрелой. Техническое устройство с выносной стрелой содержит раскрытое выше устройство управления скоростью двигателя. Поскольку устройство управления скоростью двигателя обладает раскрытыми выше техническими преимуществами, техническое устройство с выносной стрелой, содержащее устройство управления скоростью двигателя, также обладает соответствующими техническими преимуществами, которые в дальнейшем подробно описаны не будут.
В одном варианте реализации настоящего изобретения техническое устройство с выносной стрелой может быть техническим машинным оборудованием, выполняющим операции с использованием стрелы, например, транспортным средством с насосом для подачи бетона, распределителем бетонной смеси, вездеходным подъемным краном или автокраном.
Предшествующее описание используемых в качестве примера вариантов реализации настоящего изобретения было представлено только для целей иллюстрации и описания и не предназначено быть исчерпывающим, или ограничивать изобретение точными раскрытыми формами. В свете вышеупомянутого описания возможны многие модификации и изменения.
Варианты реализации настоящего изобретения были выбраны и описаны для объяснения принципов изобретения и их практического использования, предназначенного для содействия другим специалистам в данной области техники в использовании настоящего изобретения и различных вариантов его реализации с различными изменениями, подходящими для конкретного рассматриваемого использования. Альтернативные варианты реализации настоящего изобретения очевидны для специалистов в данной области техники, к которой принадлежит настоящее изобретение, без отступления от его сущности и объема. В соответствии с этим объем настоящего изобретения определен приложенными пунктами формулы изобретения, а не предшествующим описанием и описанными в нем в качестве примера вариантами реализации.
Способ управления скоростью двигателя предназначен для управления выходной скоростью двигателя технического устройства с выносной стрелой во время работы стрелы, включает измерение давления нагрузки гидравлического устройства и скорости перемещения стрелы; определение центральным блоком управления значения целевой скорости двигателя согласно измеренным давлению нагрузки гидравлического устройства и скорости перемещения стрелы; отсылку центральным блоком управления значения целевой скорости двигателя на блок управления двигателем и выполнение блоком управления двигателем регулировки скорости средствами обратной связи согласно текущему значению скорости, возвращенной двигателем, таким образом, чтобы текущая скорость двигателя была согласована с целевой скоростью двигателя. Дополнительные аспекты изобретения представляют собой устройство управления скоростью двигателя и техническое устройство с выносной стрелой, содержащее устройство управления скоростью двигателя. 3 н. и 7 з.п. ф-лы, 3 ил.
1. Способ управления скоростью двигателя, предназначенный для управления выходной скоростью двигателя технического устройства с выносной стрелой при работе стрелы, включающий
этап А, на котором измеряют давление нагрузки гидравлического устройства и скорость перемещения стрелы,
этап В, на котором определяют целевое значение скорости двигателя с использованием центрального блока управления двигателя и в соответствии с указанными измеренными давлением нагрузки гидравлического устройства и скоростью перемещения стрелы,
этап С, на котором с использованием центрального блока управления пересылают целевое значение скорости двигателя в блок управления двигателем, и
выполнение с использованием блока управления двигателем регулировки скорости средствами обратной связи в соответствие с текущим значением скорости, возвращенной двигателем так, что текущая скорость двигателя оказывается согласованной с целевым значением скорости двигателя.
2. Способ по п. 1, в котором этап В включает
вычисление первоначальной управляемой скорости двигателя, которая согласовывает указанное давление нагрузки и скорость перемещения стрелы согласно модели согласования мощности и модели согласования потока, и
определение целевой скорости двигателя согласно первоначальной управляемой скорости двигателя.
3. Способ по п. 2, в котором
целевая скорость двигателя является первоначальной управляемой скоростью двигателя или
центральный блок управления получает значение сегментной скорости двигателя, соответствующей первоначальной управляемой скорости двигателя, а целевой скоростью двигателя является указанная сегментная скорость двигателя.
4. Способ по п. 2 или 3, в котором
указанное давление нагрузки измеряют посредством датчика давления, размещенного в гидравлическом устройстве.
5. Способ по п. 2 или 3, в котором
скорость перемещения стрелы получают из амплитуды штанги толкателя и сдвига устройства дистанционного управления стрелы.
6. Способ по п. 5, в котором
первоначальная управляемая скорость двигателя, давление нагрузки и амплитуда штанги толкателя удовлетворяют зависимости n=f(P, q, Т0, T1, …, Tn), где
n - первоначальная управляемая скорость двигателя,
Р - давление нагрузки,
q - объемная производительность гидравлического насоса,
Т0 - амплитуда штанги толкателя, которая соответствует поворотной стреле,
Т1 - амплитуда штанги толкателя, которая соответствует первой секции стрелы, а
Tn - амплитуда штанги толкателя, которая соответствует n-й секции стрелы.
7. Устройство управления скоростью двигателя, содержащее центральный блок управления и блок управления двигателем, причем
центральный блок управления выполнен с возможностью
измерения давления нагрузки гидравлического устройства и скорости перемещения стрелы,
определения целевой скорости двигателя в соответствии с указанными измеренными давлением нагрузки гидравлического устройства и скоростью перемещения стрелы и
пересылки целевого значения скорости двигателя в блок управления двигателем, а
блок управления двигателем выполнен с возможностью выполнения регулировки скорости средствами обратной связи в соответствии с текущим значением скорости, возвращенной двигателем так, что текущая скорость двигателя оказывается согласованной с целевой скоростью двигателя.
8. Устройство по п. 7, дополнительно содержащее
датчик давления, выполненный с возможностью измерения давления нагрузки гидравлического устройства, который размещен в указанном гидравлическом устройстве.
9. Техническое устройство с выносной стрелой, содержащее устройство управления скоростью двигателя по п. 7 или 8.
10. Техническое устройство по п. 9, в котором
техническое устройство с выносной стрелой представляет собой транспортное средство с насосом для подачи бетона, распределитель бетонной смеси, вездеходный подъемный кран или автокран.
| US 20100262353 A1, 14.10.2010 | |||
| US 0005701691 A1, 30.12.1997 | |||
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СИЛОВОЙ УСТАНОВКОЙ АВТОМОБИЛЬНОГО КРАНА | 0 |
|
SU312820A1 |
| ГИДРОМАНИПУЛЯТОР | 1995 |
|
RU2107655C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |

