ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
[0001] Настоящая заявка испрашивает приоритет по заявке на патент Китая №202210180549.8, поданной 25 февраля 2022 и поименованной "Способ управления и устройство для горнопроходческой машины, читаемый носитель для хранения и горнопроходческая машина", которая посредством ссылки полностью включена в настоящий документ.
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящая заявка относится к технической области автоматического управления, в частности, к способу управления и устройству для горнопроходческой машины (т.е. проходческого комбайна), читаемому носителю для хранения и горнопроходческой машине.
УРОВЕНЬ ТЕХНИКИ
[0003] В уровне техники изменение тока двигателя для режущего органа обычно обнаруживается датчиком тока, и затем скорость поворота режущего органа оценивается и управляется согласно току двигателя для режущего органа. Это решение имеет пониженную точность, и если датчик тока допускает ошибку, скорость поворота режущего органа не может быть оценена и управляема надлежащим образом.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0004] Настоящая заявка направлена на решение по меньшей мере одной из технических проблем, существующих в уровне техники или относящихся к уровню техники.
[0005] С этой целью, в первом аспекте настоящей заявки предложен способ управления горнопроходческой машиной.
[0006] Во втором аспекте настоящей заявки предложено управляющее устройство для горнопроходческой машины.
[0007] В третьем аспекте настоящей заявки предложен читаемый носитель для хранения.
[0008] В четвертом аспекте настоящей заявки предложена горнопроходческая машина.
[0009] Ввиду этого, согласно первому аспекту настоящей заявки предложен способ управления горнопроходческой машиной, включающей в себя корпус машины, режущий орган, расположенный на корпусе машины, и масляный цилиндр, выполненный с возможностью приведения в действие режущего органа для его поворота, при этом способ управления включает: получение первого набора данных, обнаруженных первым компонентом обнаружения, при этом первый набор данных используют для указания рабочих параметров режущего органа; определение прогнозируемого значения скорости поворота согласно первому набору данных; получение второго набора данных, обнаруженных вторым компонентом обнаружения, при этом второй набор данных используют для указания параметров положения корпуса машины; и определение целевого значения скорости поворота согласно прогнозируемому значению скорости поворота и второму набору данных и управление режущим органом для его поворота согласно целевому значению скорости поворота.
[0010] Следует отметить, что исполнительный элемент способа управления горнопроходческой машиной, предложенного в настоящем документе, может быть управляющим устройством для горнопроходческой машины, и для более ясного описания способа управления горнопроходческой машиной, предложенного в настоящем документе, исполнительный элемент способа управления горнопроходческой машиной приведен для примера как управляющее устройство для горнопроходческой машины в следующем техническом решении.
[0011] В этом техническом решении первый набор данных используется для указания рабочих параметров режущего органа, таких как ток двигателя для режущего органа, вибрационное ускорение режущего органа и давление в масляном тракте масляного цилиндра. Второй набор данных используется для указания параметров положения корпуса горнопроходческой машины, таких как смещение курсового угла корпуса машины, смещение угла продольного наклона корпуса машины, поперечное смещение корпуса машины и продольное смещение корпуса машины.
[0012] В частности, управляющее устройство получает первый набор данных, обнаруженный первым компонентом обнаружения, и определяет прогнозируемое значение скорости поворота согласно первому набору данных. В частности, первый компонент обнаружения состоит из множества датчиков, соответственно соединенных с управляющим устройством; управляющее устройство получает первый набор данных посредством множества датчиков; и после получения первого набора данных управляющее устройство оценивает скорость поворота режущего органа согласно соответствующим рабочим параметрам режущего органа для определения прогнозируемого значения скорости поворота режущего органа.
[0013] Кроме того, после определения прогнозируемого значения скорости поворота режущего органа управляющее устройство получает второй набор данных, обнаруженный вторым компонентом обнаружения, и определяет согласно второму набору данных и упомянутому выше прогнозируемому значению скорости поворота целевое значение скорости поворота для управления поворотом режущего органа. Понятно, что второй компонент обнаружения также состоит из множества датчиков, соответственно соединенных с управляющим устройством; управляющее устройство получает второй набор данных посредством множества датчиков; после получения второго набора данных управляющее устройство определяет целевое значение скорости поворота согласно прогнозируемому значению скорости поворота и соответствующим параметрам положения режущего органа во втором наборе данных, так что режущий орган поворачивается согласно целевому значению скорости поворота.
[0014] В уровне техники изменение тока двигателя для режущего органа обычно обнаруживается датчиком тока, и затем скорость поворота режущего органа оценивается и управляется согласно току двигателя для режущего органа. Это решение имеет низкую точность, и если датчик тока допускает ошибку, скорость поворота режущего органа не может быть оценена и управляема надлежащим образом.
[0015] Таким образом, в техническом решении настоящего изобретения управляющее устройство определяет прогнозируемое значение скорости поворота согласно первому набору данных, обнаруженному первым компонентом обнаружения, и затем определяет целевое значение скорости поворота, объединяя второй набор данных, обнаруженный вторым компонентом обнаружения, с прогнозируемым значением скорости поворота, при этом первый набор данных используется для указания рабочих параметров режущего органа, а второй набор данных используется для указания параметров положения корпуса машины. Таким образом, в техническом решении настоящего изобретения управляющее устройство оценивает скорость поворота режущего органа и управляет ею согласно двум параметрам, т.е. рабочим параметрам режущего органа и параметрам положения корпуса горнопроходческой машины, что улучшает оценку скорости поворота режущего органа и точность управления ею. В то же самое время следует понимать, что каждый из первого набора данных и второго набора данных включает в себя больше одного параметра, и из этого можно заметить, что в техническое решение настоящего изобретения включено множество датчиков для обнаружения рабочих параметров режущего органа и обнаружения корпуса горнопроходческой машины, т.е. когда определенный датчик допускает ошибку, оценка скорости поворота режущего органа и управление ею не могут быть ухудшены, и, таким образом, гарантируются безопасность труда и надежность горнопроходческой машины.
[0016] Кроме того, упомянутый выше способ управления горнопроходческой машиной согласно настоящему изобретению также может иметь следующие дополнительные технические признаки.
[0017] В упомянутом выше техническом решении первый набор данных включает в себя ток двигателя для режущего органа, вибрационное ускорение режущего органа и давление в масляном тракте масляного цилиндра; а второй набор данных включает в себя смещение курсового угла корпуса машины, смещение угла продольного наклона корпуса машины, поперечное смещение корпуса машины и продольное смещение корпуса машины.
[0018] В этом техническом решении первый набор данных, в частности, включает в себя ток двигателя для режущего органа, вибрационное ускорение режущего органа и давление в масляном тракте масляного цилиндра, и следует отметить, что прогнозируемое значение скорости поворота режущего органа может быть определено согласно любому из тока двигателя для режущего органа, вибрационного ускорения режущего органа и давления в масляном тракте масляного цилиндра, находящихся в упомянутых выше рабочих параметрах режущего органа.
[0019] Кроме того, второй набор данных, в частности, включает в себя смещение курсового угла корпуса горнопроходческой машины, смещение угла продольного наклона корпуса горнопроходческой машины, поперечное смещение корпуса горнопроходческой машины и продольное смещение корпуса горнопроходческой машины, и следует отметить, что согласно любому из смещения курсового угла корпуса машины, смещения угла продольного наклона корпуса машины, поперечного смещения корпуса машины и продольного смещения корпуса машины, находящихся в упомянутых выше параметрах положения корпуса горнопроходческой машины, может быть вынесено решение относительно того, пригодно ли упомянутое выше прогнозируемое значение скорости поворота для использования в качестве целевого значения скорости поворота для управления поворотом режущего органа.
[0020] В упомянутом выше техническом решении этап определения прогнозируемого значения скорости поворота согласно первому набору данных, в частности, включает: получение первого заданного коэффициента соотношения между сопротивлением нагрузки при резании и скоростью поворота режущего органа; определение первого сопротивления нагрузки при резании согласно току двигателя для режущего органа и определение первого прогнозируемого значения скорости поворота согласно первому сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения; определение второго сопротивления нагрузки при резании согласно вибрационному ускорению режущего органа и определение второго прогнозируемого значения скорости поворота согласно второму сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения; определение третьего сопротивления нагрузки при резании согласно давлению в масляном тракте масляного цилиндра и определение третьего прогнозируемого значения скорости поворота согласно третьему сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения; и определение прогнозируемого значения скорости поворота согласно первому прогнозируемому значению скорости поворота, второму прогнозируемому значению скорости поворота и третьему прогнозируемому значению скорости поворота.
[0021] В этом техническом решении первым заданным коэффициентом соотношения является соответствующий коэффициент соотношения между сопротивлением нагрузки при резании и скоростью поворота режущего органа. В частности, сопротивление нагрузки при резании может быть вычислено согласно рабочим параметрам режущего органа, а прогнозируемое значение скорости поворота режущего органа может быть определено согласно соответствующему коэффициенту соотношения между сопротивлением нагрузки при резании и скоростью поворота режущего органа.
[0022] В этом техническом решении конкретный этап, на котором управляющее устройство определяет прогнозируемое значение скорости поворота согласно первому набору данных, включает подэтап, на котором: управляющее устройство сначала получает первый заданный коэффициент соотношения между сопротивлением нагрузки при резании и скоростью поворота режущего органа, а затем определяет множество прогнозируемых значений скорости поворота режущего органа согласно первому заданному коэффициенту соотношения и множеству рабочих параметров режущего органа. Первый заданный коэффициент соотношения задан согласно информации об оборудовании и фактическим рабочим условиям горнопроходческой машины.
[0023] В частности, управляющее устройство определяет первое сопротивление нагрузки при резании согласно току двигателя для режущего органа, находящемуся в первом наборе данных, и определяет первое прогнозируемое значение скорости поворота согласно первому сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения; управляющее устройство определяет второе сопротивление нагрузки при резании согласно вибрационному ускорению режущего органа, находящемуся в первом наборе данных, и определяет второе прогнозируемое значение скорости поворота согласно второму сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения; и управляющее устройство определяет третье сопротивление нагрузки при резании согласно давлению в масляном тракте масляного цилиндра, находящемуся в первом наборе данных, и определяет первое прогнозируемое значение скорости поворота согласно третьему сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения.
[0024] Кроме того, после определения первого прогнозируемого значения скорости поворота, второго прогнозируемого значения скорости поворота и третьего прогнозируемого значения скорости поворота согласно току двигателя для режущего органа, вибрационному ускорению режущего органа и давлению в масляном тракте масляного цилиндра соответственно управляющее устройство дополнительно используется для определения первого прогнозируемого значения скорости поворота, второго прогнозируемого значения скорости поворота и третьего прогнозируемого значения скорости поворота для определения прогнозируемого значения скорости поворота.
[0025] В этом техническом решении управляющее устройство соответственно определяет три прогнозируемых значения скорости поворота режущего органа согласно току двигателя для режущего органа, вибрационному ускорению режущего органа и давлению в масляном тракте масляного цилиндра и затем определяет конечное прогнозируемое значение скорости поворота согласно этим трем прогнозируемым значениям, и, таким образом, повышается точность определения прогнозируемого значения скорости поворота.
[0026] В упомянутом выше техническом решении режущий орган, в частности, включает в себя режущую головку, а этап определения первого сопротивления нагрузки при резании согласно току двигателя для режущего органа, в частности, включает: получение диаметра режущей головки, значения скорости вращения двигателя для режущего органа и входного напряжения двигателя для режущего органа; и определение первого сопротивления нагрузки при резании согласно диаметру режущей головки, скорости вращения двигателя для режущего органа, входному напряжению двигателя для режущего органа и току двигателя для режущего органа.
[0027] В этом техническом решении режущий орган включает в себя режущую головку, а конкретный этап, на котором управляющее устройство определяет первое сопротивление нагрузки при резании согласно току двигателя для режущего органа, включает подэтап, на котором: управляющее устройство получает данные от трех аспектов, включая диаметр режущей головки, значение скорости вращения двигателя для режущего органа и входное напряжение двигателя для режущего органа, и затем вычисляет первое сопротивление нагрузки при резании согласно данным в упомянутых выше трех аспектах в сочетании с током двигателя для режущего органа.
[0028] Понятно, что все из диаметра режущей головки, значения скорости вращения двигателя для режущего органа и входного напряжения двигателя для режущего органа могут быть определены согласно информации об оборудовании горнопроходческой машины и предварительно сохранены в устройстве для хранения; и при вычислении первого сопротивления нагрузки при резании управляющее устройство получает диаметр режущей головки, значение скорости вращения двигателя для режущего органа и входное напряжение двигателя для режущего органа из устройства для хранения.
[0029] В упомянутом выше техническом решении этап определения второго сопротивления нагрузки при резании согласно вибрационному ускорению режущего органа, в частности, включает: получение второго заданного коэффициента соотношения между вибрационным ускорением режущего органа и сопротивлением нагрузки при резании; и определение второго сопротивления нагрузки при резании согласно второму заданному коэффициенту соотношения и вибрационному ускорению режущего органа.
[0030] В этом техническом решении конкретный этап, на котором управляющее устройство определяет второе сопротивление нагрузки при резании согласно вибрационному ускорению режущего органа, включает подэтап, на котором: управляющее устройство сначала получает второй заданный коэффициент соотношения между вибрационным ускорением режущего органа с режущей головкой и сопротивлением нагрузки при резании, а затем вычисляет второе сопротивление нагрузки при резании согласно второму заданному коэффициенту соотношения в сочетании с вибрационным ускорением режущего органа.
[0031] Понятно, что второй заданный коэффициент соотношения задан согласно информации об оборудовании горнопроходческой машины и фактическим производственным условиям горнопроходческой машины и может быть предварительно сохранен в устройстве для хранения; и при вычислении второго сопротивления нагрузки при резании управляющее устройство получает второй заданный коэффициент соотношения из устройства для хранения, а затем вычисляет второе сопротивление нагрузки при резании.
[0032] В упомянутом выше техническом решении этап определения третьего сопротивления нагрузки при резании согласно давлению в масляном тракте масляного цилиндра, в частности, включает в себя: определение смещения поршня в масляном цилиндре согласно давлению в масляном тракте масляного цилиндра; получение эффективной площади камеры масляного цилиндра, падения давления на нагрузке, полной массы нагрузки и поршня в масляном цилиндре, коэффициентов вязкостного демпфирования нагрузки и поршня в масляном цилиндре и жесткости нагрузочной пружины; и определение третьего сопротивления нагрузки при резании согласно эффективной площади камеры масляного цилиндра, падению давления на нагрузке, полной массе нагрузки и поршня в масляном цилиндре, коэффициентам вязкостного демпфирования нагрузки и поршня в масляном цилиндре, жесткости нагрузочной пружины и смещению поршня в масляном цилиндре.
[0033] В этом техническом решении конкретный этап, на котором управляющее устройство определяет третье сопротивление нагрузки при резании согласно давлению в масляном тракте масляного цилиндра, включает подэтап, на котором: управляющее устройство определяет смещение поршня в масляном цилиндре согласно давлению в масляном тракте масляного цилиндра и получает эффективную площадь камеры масляного цилиндра, падение давления на нагрузке, полную массу нагрузки и поршня в масляном цилиндре, коэффициенты вязкостного демпфирования нагрузки и поршня в масляном цилиндре, жесткость нагрузочной пружины и смещение поршня в масляном цилиндре для определения третьего сопротивления нагрузки при резании.
[0034] Понятно, что третье сопротивление нагрузки при резании, определенное согласно эффективной площади камеры масляного цилиндра, падению давления на нагрузке, полной массе нагрузки и поршня в масляном цилиндре, коэффициентам вязкостного демпфирования нагрузки и поршня в масляном цилиндре, жесткости нагрузочной пружины и смещению поршня в масляном цилиндре, может быть определено согласно информации об оборудовании горнопроходческой машины и фактическим рабочим условиям горнопроходческой машины.
[0035] Кроме того, управляющее устройство вычисляет третье сопротивление нагрузки при резании согласно эффективной площади камеры масляного цилиндра, падению давления на нагрузке, полной массе нагрузки и поршня в масляном цилиндре, коэффициентам вязкостного демпфирования нагрузки и поршня в масляном цилиндре, жесткости нагрузочной пружины и смещению поршня в масляном цилиндре.
[0036] В упомянутом выше техническом решении этап определения прогнозируемого значения скорости поворота согласно первому прогнозируемому значению скорости поворота, второму прогнозируемому значению скорости поворота и третьему прогнозируемому значению скорости поворота, в частности, включает: определение одного и того же прогнозируемого значения в качестве прогнозируемого значения скорости поворота в случае, когда части или все из первого прогнозируемого значения скорости поворота, второго прогнозируемого значения скорости поворота и третьего прогнозируемого значения скорости поворота являются одними и теми же; или определение прогнозируемого значения с самым высоким приоритетом в качестве прогнозируемого значения скорости поворота в случае, когда первое прогнозируемое значение скорости поворота, второе прогнозируемое значение скорости поворота и третье прогнозируемое значение скорости поворота являются различными.
[0037] В этом техническом решении конкретный этап, на котором управляющее устройство определяет конечное прогнозируемое значение скорости поворота согласно указанным трем прогнозируемым значениям, т.е. первому прогнозируемому значению скорости поворота, второму прогнозируемому значению скорости поворота и третьему прогнозируемому значению скорости поворота, включает подэтап, на котором: одно и то же прогнозируемое значение используют в качестве конечного прогнозируемого значения скорости поворота в случае, когда части или все из первого прогнозируемого значения скорости поворота, второго прогнозируемого значения скорости поворота и третьего прогнозируемого значения скорости поворота являются одними и теми же, т.е. следуя принципу "меньшинство подчиняется большинству". Прогнозируемое значение с самым высоким приоритетом используется в качестве конечного прогнозируемого значения скорости поворота в случае, когда первое прогнозируемое значение скорости поворота, второе прогнозируемое значение скорости поворота и третье прогнозируемое значение скорости поворота являются различными, т.е. следуют принципу "защиты приоритета".
[0038] Следует отметить, что приоритет прогнозируемого значения определяется согласно источнику вычисления, т.е. он определяется согласно току двигателя для режущего органа, вибрационному ускорению режущего органа и давлению в масляном тракте масляного цилиндра, а приоритет тока двигателя для режущего органа, вибрационного ускорения режущего органа и давления в масляном тракте масляного цилиндра определен согласно фактическим производственным условиям горнопроходческой машины.
[0039] В этом техническом решении управляющее устройство определяет три прогнозируемых значения скорости поворота режущего органа соответственно согласно току двигателя для режущего органа, вибрационному ускорению режущего органа и давлению в масляном тракте масляного цилиндра и определяет конечное прогнозируемое значение скорости поворота из этих трех прогнозируемых значений, следуя принципу "меньшинство подчиняется большинству" и принципу "защиты приоритета", и, таким образом, повышается точность определения прогнозируемого значения скорости поворота.
[0040] В упомянутом выше техническом решении этап определения целевого значения скорости поворота согласно прогнозируемому значению скорости поворота и второму набору данных, в частности, включает: определение прогнозируемого значения смещения курсового угла корпуса машины, прогнозируемого значения смещения угла продольного наклона корпуса машины, прогнозируемого значения поперечного смещения корпуса машины и прогнозируемого значения продольного смещения корпуса машины согласно прогнозируемому значению скорости поворота; подтверждение того, согласованы ли прогнозируемое значение смещения курсового угла корпуса машины, прогнозируемое значение смещения угла продольного наклона корпуса машины, прогнозируемое значение поперечного смещения корпуса машины и прогнозируемое значение продольного смещения корпуса машины со значением смещения курсового угла корпуса машины, значением смещения угла продольного наклона корпуса машины, значением поперечного смещения корпуса машины и значением продольного смещения корпуса машины во втором наборе данных; и определение прогнозируемого значения скорости поворота в качестве целевого значения скорости поворота в случае, когда любое из прогнозируемых значений согласовано с параметрами во втором наборе данных.
[0041] В этом техническом решении конкретный этап, на котором управляющее устройство определяет целевую скорость поворота согласно прогнозируемому значению скорости поворота и второму набору данных, включает подэтап, на котором: управляющее устройство оценивает прогнозируемое значение смещения курсового угла корпуса машины, прогнозируемое значение смещения угла продольного наклона корпуса машины, прогнозируемое значение поперечного смещения корпуса машины и прогнозируемое значение продольного смещения корпуса машины согласно прогнозируемому значению скорости поворота, т.е. оно прогнозирует параметры положения корпуса горнопроходческой машины согласно прогнозируемому значению скорости поворота.
[0042] Кроме того, после прогнозирования параметров положения корпуса горнопроходческой машины согласно прогнозируемому значению скорости поворота управляющее устройство решает, согласованы ли части или все из прогнозируемого значения смещения курсового угла корпуса машины, прогнозируемого значения смещения угла продольного наклона корпуса машины, прогнозируемого значения поперечного смещения корпуса машины и прогнозируемого значения продольного смещения корпуса машины в параметрах положения корпуса горнопроходческой машины со смещением курсового угла корпуса машины, смещением угла продольного наклона корпуса машины, поперечным смещением корпуса машины и продольным смещением корпуса машины во втором наборе данных, и если любое из прогнозируемых значений согласовано с параметрами положения во втором наборе данных, упомянутое выше прогнозируемое значение скорости поворота определяют как целевое значение скорости поворота для управления поворотом режущего органа.
[0043] В этом техническом решении управляющее устройство прогнозирует параметры положения корпуса горнопроходческой машины согласно прогнозируемому значению скорости поворота и затем выносит решение в сочетании с параметрами положения во втором наборе данных, и наконец определяет, используется ли прогнозируемое значение скорости поворота в качестве целевого значения скорости поворота, так что точность определяемого целевого значения скорости поворота, используемого для управления поворотом режущего органа, повышается, и, таким образом, улучшаются безопасность труда и надежность горнопроходческой машины.
[0044] Согласно второму аспекту настоящей заявки предложено управляющее устройство для горнопроходческой машины, включающее в себя: блок получения, выполненный с возможностью получения первого набора данных, обнаруженных первым компонентом обнаружения, при этом первый набор данных используется для указания рабочих параметров режущего органа; блок обработки, выполненный с возможностью определения прогнозируемого значения скорости поворота согласно первому набору данных; кроме того, блок получения выполнен с возможностью получения второго набора данных, обнаруженных вторым компонентом обнаружения, при этом второй набор данных используется для указания параметров положения корпуса машины; кроме того, блок обработки выполнен с возможностью определения целевого значения скорости поворота согласно прогнозируемому значению скорости поворота и второму набору данных и управления режущим органом для его поворота согласно целевому значению скорости поворота.
[0045] В этом техническом решении первый набор данных используется для указания рабочих параметров режущего органа, таких как ток двигателя для режущего органа, вибрационное ускорение режущего органа и давление в масляном тракте масляного цилиндра. Второй набор данных используется для указания параметров положения корпуса горнопроходческой машины, таких как смещение курсового угла корпуса машины, смещение угла продольного наклона корпуса машины, поперечное смещение корпуса машины и продольное смещение корпуса машины.
[0046] В частности, блок получения получает первый набор данных, обнаруженный первым компонентом обнаружения, а блок обработки определяет прогнозируемое значение скорости поворота согласно первому набору данных. В частности, первый компонент обнаружения состоит из множества датчиков, соответственно соединенных с управляющим устройством; блок получения получает первый набор данных посредством множества датчиков; и после получения первого набора данных блок обработки оценивает скорость поворота режущего органа согласно соответствующим рабочим параметрам режущего органа для определения прогнозируемого значения скорости поворота режущего органа.
[0047] Кроме того, блок получения дополнительно выполнен с возможностью получения второго набора данных, обнаруженных вторым компонентом обнаружения, после того, как блок обработки определит прогнозируемое значение скорости поворота режущего органа, при этом блок обработки дополнительно выполнен с возможностью определения целевого значения скорости поворота согласно второму набору данных и упомянутому выше прогнозируемому значению скорости поворота для управления поворотом режущего органа. Понятно, что второй компонент обнаружения также состоит из множества датчиков, соответственно соединенных с управляющим устройством; блок получения получает второй набор данных посредством множества датчиков; после получения второго набора данных блок обработки определяет целевое значение скорости поворота согласно прогнозируемому значению скорости поворота и соответствующим параметрам положения режущего органа во втором наборе данных, так что режущий орган поворачивается согласно целевому значению скорости поворота.
[0048] В уровне техники изменение тока двигателя для режущего органа обычно обнаруживается датчиком тока, и затем скорость поворота режущего органа оценивается и управляется согласно току двигателя для режущего органа. Это решение приводит к снижению точности, и если датчик тока допускает ошибку, скорость поворота режущего органа невозможно оценивать и управлять ею.
[0049] Таким образом, в техническом решении настоящей заявки блок обработки определяет прогнозируемое значение скорости поворота согласно первому набору данных, полученному блоком получения, и затем определяет целевое значение скорости поворота, объединяя второй набор данных, полученный блоком получения, с прогнозируемым значением скорости поворота, при этом первый набор данных используется для указания рабочих параметров режущего органа, а второй набор данных используется для указания параметров положения корпуса машины. Таким образом, в техническом решении настоящей заявки блок обработки оценивает скорость поворота режущего органа и управляет ею согласно двум параметрам, т.е. рабочим параметрам режущего органа и параметрам положения корпуса горнопроходческой машины, что улучшает оценку скорости поворота режущего органа и точность управления ею. В то же время, следует понимать, что каждый из первого набора данных и второго набора данных включает в себя больше чем один параметр, и можно заметить из этого, что в техническом решении настоящей заявки используется множество датчиков для обнаружения рабочих параметров режущего органа и обнаружения корпуса горнопроходческой машины, т.е. когда определенный датчик допускает ошибку, оценка скорости поворота режущего органа и управление ею не ухудшаются, и, таким образом, гарантируются безопасность труда и надежность горнопроходческой машины.
[0050] Согласно третьему аспекту настоящей заявки предложен читаемый носитель для хранения, при этом в читаемом носителе для хранения хранится программа или инструкция, которая при ее исполнении процессором осуществляет способ управления горнопроходческой машиной, предложенный в первом аспекте настоящей заявки. Таким образом, читаемый носитель для хранения имеет все обеспечивающие преимущество эффекты способа управления горнопроходческой машиной, предложенного в первом аспекте настоящей заявки, которые не будут описаны подробно в данном случае.
[0051] Согласно четвертому аспекту настоящей заявки предложена горнопроходческая машина, включающая в себя: корпус машины; режущий орган, расположенный на корпусе машины; масляный цилиндр, соединенный с режущим органом и выполненный с возможностью приведения в действие режущего органа для поворота; первый компонент обнаружения, выполненный с возможностью обнаружения первого набора данных, используемого для указания рабочих параметров режущего органа; второй компонент обнаружения, выполненный с возможностью обнаружения второго набора данных, используемого для указания параметров положения корпуса машины; и
[0052] кроме того, горнопроходческая машина дополнительно включает в себя управляющее устройство для горнопроходческой машины, предложенное во втором аспекте настоящей заявки и/или читаемый носитель для хранения, предложенный в третьем аспекте настоящей заявки, и, таким образом, горнопроходческая машина имеет все обеспечивающие преимущество эффекты управляющего устройства для горнопроходческой машины, предложенного во втором аспекте настоящей заявки, или читаемого носителя для хранения, предложенного в третьем аспекте настоящей заявки, которые не будут описаны подробно в данном случае.
[0053] Дополнительные аспекты и преимущества настоящего изобретения станут очевидными в следующей части описания или могут быть изучены при практическом осуществлении настоящего изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0054] Приведенные выше и/или дополнительные аспекты и преимущества настоящего изобретения станут очевидными и будут легко оценены из следующего описания вариантов реализации в соединении с сопроводительными чертежами, на которых:
[0055] На ФИГ. 1 схематически представлена первая блок-схема способа управления горнопроходческой машиной согласно одному варианту реализации настоящего изобретения;
[0056] На ФИГ. 2 схематически представлена вторая блок-схема способа управления горнопроходческой машиной согласно одному варианту реализации настоящего изобретения;
[0057] На ФИГ. 3 схематически представлена третья блок-схема способа управления горнопроходческой машиной согласно одному варианту реализации настоящего изобретения;
[0058] На ФИГ. 4 схематически представлена четвертая блок-схема способа управления горнопроходческой машиной согласно одному варианту реализации настоящего изобретения;
[0059] На ФИГ. 5 схематически представлена пятая блок-схема способа управления горнопроходческой машиной согласно одному варианту реализации настоящего изобретения;
[0060] На ФИГ. 6 схематически представлена шестая блок-схема способа управления горнопроходческой машиной согласно одному варианту реализации настоящего изобретения;
[0061] На ФИГ. 7 схематически представлена седьмая блок-схема способа управления горнопроходческой машиной согласно одному варианту реализации настоящего изобретения;
[0062] На ФИГ. 8 схематически представлена принципиальная схема управляющего устройства для горнопроходческой машины согласно одному варианту реализации настоящего изобретения;
[0063] На ФИГ. 9 схематически представлена принципиальная схема горнопроходческой машины согласно одному варианту реализации настоящего изобретения; и
[0064] На ФИГ. 10 схематически представлена общая блок-схема способа управления горнопроходческой машиной согласно одному варианту реализации настоящего изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0065] Для более ясного понимания упомянутых выше задач, признаков и преимуществ настоящего изобретения настоящее изобретение будет дополнительно описано ниже подробно в соединении с сопроводительными чертежами и конкретными вариантами реализации. Следует отметить, что варианты реализации и признаки в вариантах реализации настоящего изобретения могут быть бесконфликтно объединены друг с другом.
[0066] В следующем описании приведено множество конкретных подробностей для обеспечения полного понимания настоящего изобретения. Однако настоящее изобретение также может быть осуществлено иным способом, отличающимся от конкретно описанного в настоящем документе. Таким образом, объем охраны настоящего изобретения не предназначен не может быть ограничен конкретными вариантами реализации, раскрытыми ниже.
[0067] Способ управления горнопроходческой машиной (т.е. проходческим комбайном) и устройство для реализации этого способа, а также читаемый носитель для хранения и горнопроходческая машина, предложенные в вариантах реализации настоящей заявки, будут подробно описаны ниже на примере конкретных вариантов реализации и сценариев их применения со ссылкой на ФИГ. 1-10.
[0068] Вариант 1 реализации
[0069] На ФИГ. 1 схематически представлена блок-схема способа управления горнопроходческой машиной согласно одному варианту реализации настоящего изобретения, при этом способ управления включает в себя следующие этапы.
[0070] На этапе S102 получают первый набор данных, обнаруженный первым компонентом обнаружения, используемый для указания рабочих параметров режущего органа.
[0071] На этапе S104 прогнозируемое значение скорости поворота определяют согласно первому набору данных.
[0072] На этапе S106 получают второй набор данных, обнаруженный вторым компонентом обнаружения, при этом второй набор данных используют для указания параметров положения корпуса машины.
[0073] На этапе S108 определяют целевое значение скорости поворота согласно прогнозируемому значению скорости поворота и второму набору данных и управляют режущим органом для его поворота согласно целевому значению скорости поворота.
[0074] Следует отметить, что исполнительным элементом способа управления горнопроходческой машиной, предложенной в настоящем варианте реализации, может быть управляющее устройство горнопроходческой машины, и для более ясного описания способа управления горнопроходческой машиной, предложенной в настоящем варианте реализации, исполнительный элемент способа управления горнопроходческой машиной приведен для примера в качестве управляющего устройства горнопроходческой машины в следующем ниже описании.
[0075] В этом варианте реализации первый набор данных используется для указания рабочих параметров режущего органа, а второй набор данных используется для указания параметров положения корпуса горнопроходческой машины.
[0076] В частности, управляющее устройство получает первый набор данных, обнаруженный первым компонентом обнаружения, и определяет прогнозируемое значение скорости поворота согласно этому первому набору данных. В частности, первый компонент обнаружения состоит из множества датчиков, соответственно соединенных с управляющим устройством; управляющее устройство получает первый набор данных посредством множества датчиков; а после получения первого набора данных управляющее устройство оценивает скорость поворота режущего органа согласно соответствующим рабочим параметрам режущего органа для определения прогнозируемого значения скорости поворота режущего органа.
[0077] Кроме того, после определения прогнозируемого значения скорости поворота режущего органа управляющее устройство получает второй набор данных, обнаруженный вторым компонентом обнаружения, и определяет целевое значение скорости поворота для управления поворотом режущего органа. Понятно, что второй компонент обнаружения также состоит из множества датчиков, соответственно соединенных с управляющим устройством; управляющее устройство получает второй набор данных посредством множества датчиков; после получения второго набора данных управляющее устройство определяет целевое значение скорости поворота согласно прогнозируемому значению скорости поворота и соответствующим параметрам положения режущего органа во втором наборе данных, так что режущий орган поворачивается согласно целевому значению скорости поворота.
[0078] В этом варианте реализации, в частности, первый набор данных конкретно включает в себя ток двигателя для режущего органа, вибрационное ускорение режущего органа и давление в масляном тракте масляного цилиндра, при этом следует отметить, что прогнозируемое значение скорости поворота режущего органа может быть определено согласно любому из тока двигателя для режущего органа, вибрационного ускорения режущего органа и давления в масляном тракте масляного цилиндра, указанных в упомянутых выше рабочих параметрах режущего органа.
[0079] В этом варианте реализации, в частности, второй набор данных конкретно включает в себя смещение курсового угла корпуса горнопроходческой машины, смещение угла продольного наклона корпуса горнопроходческой машины, поперечное смещение корпуса горнопроходческой машины и продольное смещение корпуса горнопроходческой машины, при этом следует отметить, что на основании любого из смещения курсового угла корпуса машины, смещения угла продольного наклона корпуса машины, поперечного смещения корпуса машины и продольного смещения корпуса машины в упомянутых выше параметрах положения корпуса горнопроходческой машины можно судить о том, пригодно ли упомянутое выше прогнозируемое значение скорости поворота для использования в качестве целевого значения скорости поворота для управления поворотом режущего органа.
[0080] В уровне техники изменение тока двигателя для режущего органа обычно обнаруживается датчиком тока, и затем оценивают скорость поворота режущего органа и управляют ею согласно току двигателя для режущего органа. Это решение имеет низкую точность, и если датчик тока допускает ошибку, скорость поворота режущего органа не возможно правильно оценивать и точно управлять ею.
[0081] Таким образом, в настоящем варианте реализации управляющее устройство определяет прогнозируемое значение скорости поворота согласно первому набору данных, обнаруженному первым компонентом обнаружения, и затем определяет целевое значение скорости поворота, объединяя второй набор данных, обнаруженный вторым компонентом обнаружения, с прогнозируемым значением скорости поворота, при этом первый набор данных используется для указания рабочих параметров режущего органа, а второй набор данных используется для указания параметров положения корпуса машины. Таким образом, в настоящем варианте реализации управляющее устройство оценивает скорость поворота и управляет скоростью поворота режущего органа согласно двум параметрам, т.е. рабочим параметрам режущего органа и параметрам положения корпуса горнопроходческой машины, что улучшает оценку скорости поворота и повышает точность управления скоростью поворота режущего органа. В то же время, понятно, что каждый из первого набора данных и второго набора данных включает в себя больше одного параметра, и можно заметить из этого, что в настоящем варианте реализации используются множество датчиков для обнаружения рабочих параметров режущего органа и обнаружения корпуса горнопроходческой машины, т.е. когда определенный датчик допускает ошибку, оценка скорости поворота и управление скоростью поворота режущего органа не ухудшаются, и, таким образом, обеспечены безопасность и надежность работы горнопроходческой машины.
[0082] На ФИГ. 2 схематически представлена блок-схема способа управления горнопроходческой машиной согласно одному варианту реализации настоящего изобретения, при этом способ управления включает в себя следующие этапы.
[0083] На этапе S202 получают первый набор данных, обнаруженный первым компонентом обнаружения, при этом первый набор данных используют для указания рабочих параметров режущего органа.
[0084] На этапе S204 получают первый заданный коэффициент соотношения между сопротивлением нагрузки при резании и скоростью поворота режущего органа.
[0085] На этапе S206 первое сопротивление нагрузки при резании определяют согласно току двигателя для режущего органа, а первое прогнозируемое значение скорости поворота определяют согласно первому сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения.
[0086] На этапе S208 второе сопротивление нагрузки при резании определяют согласно вибрационному ускорению режущего органа, а второе прогнозируемое значение скорости поворота определяют согласно второму сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения.
[0087] На этапе S210 третье сопротивление нагрузки при резании определяют согласно давлению в масляном тракте масляного цилиндра, а третье прогнозируемое значение скорости поворота определяют согласно третьему сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения.
[0088] На этапе S212 прогнозируемое значение скорости поворота определяют согласно первому прогнозируемому значению скорости поворота, второму прогнозируемому значению скорости поворота и третьему прогнозируемому значению скорости поворота.
[0089] На этапе S214 получают второй набор данных, обнаруженный вторым компонентом обнаружения, при этом второй набор данных используют для указания параметров положения корпуса машины.
[0090] На этапе S216 целевое значение скорости поворота определяют согласно прогнозируемому значению скорости поворота и второму набору данных и управляют поворотом режущего органа согласно целевому значению скорости поворота.
[0091] В этом варианте реализации первым заданным коэффициентом соотношения является соответствующий коэффициент соотношения между сопротивлением нагрузки при резании и скоростью поворота режущего органа. В частности, сопротивление нагрузки при резании может быть вычислено согласно рабочим параметрам режущего органа, а прогнозируемое значение скорости поворота режущего органа может быть определено согласно соответствующему коэффициенту соотношения между сопротивлением нагрузки при резании и скоростью поворота режущего органа.
[0092] В этом варианте реализации конкретный этап, на котором управляющее устройство определяет прогнозируемое значение скорости поворота согласно первому набору данных, включает следующие действия: сначала управляющее устройство получает первый заданный коэффициент соотношения между сопротивлением нагрузки при резании и скоростью поворота режущего органа, а затем определяет множество прогнозируемых значений скорости поворота режущего органа согласно первому заданному коэффициенту соотношения и множеству рабочих параметров режущего органа. Первый заданный коэффициент соотношения задан согласно информации об оборудовании и фактическим рабочим условиям горнопроходческой машины.
[0093] В частности: управляющее устройство определяет первое сопротивление нагрузки при резании согласно току двигателя для режущего органа в первом наборе данных и определяет первое прогнозируемое значение скорости поворота согласно первому сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения; управляющее устройство определяет второе сопротивление нагрузки при резании согласно вибрационному ускорению режущего органа в первом наборе данных и определяет второе прогнозируемое значение скорости поворота согласно второму сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения; и управляющее устройство определяет третье сопротивление нагрузки при резании согласно давлению в масляном тракте масляного цилиндра в первом наборе данных и определяет первое прогнозируемое значение скорости поворота согласно третьему сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения.
[0094] Кроме того, после определения первого прогнозируемого значения скорости поворота, второго прогнозируемого значения скорости поворота и третьего прогнозируемого значения скорости поворота согласно току двигателя для режущего органа, вибрационного ускорения режущего органа и давления в масляном тракте масляного цилиндра соответственно, управляющее устройство дополнительно используется для определения первого прогнозируемого значения скорости поворота, второго прогнозируемого значения скорости поворота и третьего прогнозируемого значения скорости поворота для определения прогнозируемого значения скорости поворота.
[0095] В этом варианте реализации управляющее устройство соответственно определяет три прогнозируемых значения скорости поворота режущего органа согласно току двигателя для режущего органа, вибрационному ускорению режущего органа и давлению в масляном тракте масляного цилиндра и затем определяет конечное прогнозируемое значение скорости поворота согласно этим трем прогнозируемым значениям, и, таким образом, улучшается точность определения прогнозируемого значения скорости поворота.
[0096] На ФИГ. 3 схематически представлена блок-схема способа управления горнопроходческой машиной согласно одному варианту реализации настоящего изобретения, при этом способ управления включает в себя следующие этапы.
[0097] На этапе S302 получают первый набор данных, обнаруженный первым компонентом обнаружения, при этом первый набор данных используют для указания рабочих параметров режущего органа.
[0098] На этапе S304 получают первый заданный коэффициент соотношения между сопротивлением нагрузки при резании и скоростью поворота режущего органа.
[0099] На этапе S306 получают диаметр режущей головки, значение скорости вращения двигателя для режущего органа и входное напряжение двигателя для режущего органа.
[0100] На этапе S308 определяют первое сопротивление нагрузки при резании согласно диаметру режущей головки, скорости вращения двигателя для режущего органа, входному напряжению двигателя для режущего органа и току двигателя для режущего органа и определяют первое прогнозируемое значение скорости поворота согласно первому сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения.
[0101] На этапе S310 определяют второе сопротивление нагрузки при резании согласно вибрационному ускорению режущего органа и определяют второе прогнозируемое значение скорости поворота согласно второму сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения.
[0102] На этапе S312 определяют третье сопротивление нагрузки при резании согласно давлению в масляном тракте масляного цилиндра и определяют третье прогнозируемое значение скорости поворота согласно третьему сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения.
[0103] На этапе S314 определяют прогнозируемое значение скорости поворота согласно первому прогнозируемому значению скорости поворота, второму прогнозируемому значению скорости поворота и третьему прогнозируемому значению скорости поворота.
[0104] На этапе S316 получают второй набор данных, обнаруженный вторым компонентом обнаружения, при этом второй набор данных используют для указания параметров положения корпуса машины.
[0105] На этапе S318 определяют целевое значение скорости поворота согласно прогнозируемому значению скорости поворота и второму набору данных и управляют режущим органом для его поворота согласно целевому значению скорости поворота.
[0106] В этом варианте реализации режущий орган включает в себя режущую головку, а конкретный этап, на котором управляющее устройство определяет первое сопротивление нагрузки при резании согласно току двигателя для режущего органа, включает подэтап, на котором: управляющее устройство получает данные о трех аспектах, включая диаметр режущей головки, значение скорости вращения двигателя для режущего органа и входное напряжение двигателя для режущего органа; и затем вычисляет первое сопротивление нагрузки при резании согласно данным в упомянутых выше трех аспектах в сочетании с током двигателя для режущего органа.
[0107] Понятно, что все из диаметра режущей головки, значения скорости вращения двигателя для режущего органа и входного напряжения двигателя для режущего органа могут быть определены согласно информации об оборудовании горнопроходческой машины и могут предварительно сохранены в устройстве для хранения; а при вычислении первого сопротивления нагрузки при резании управляющее устройство получает диаметр режущей головки, значение скорости вращения двигателя для режущего органа и входное напряжение двигателя для режущего органа из устройства хранения.
[0108] В частности, формула для вычисления первого сопротивления нагрузки при резании согласно току двигателя для режущего органа выглядит следующим образом:
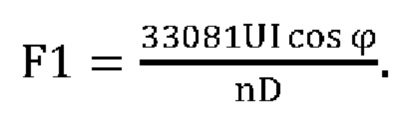
[0109] В приведенной выше формуле F1 используется для представления первого сопротивления нагрузки при резании, D используется для представления диаметра режущей головки, I используется для представления тока двигателя для режущего органа, U используется для представления входного напряжения двигателя для режущего органа, cos ϕ используется для представления фактора мощности двигателя, а n является числом полюсных пар двигателя.
[0110] На ФИГ. 4 схематически представлена блок-схема способа управления горнопроходческой машиной согласно одному варианту реализации настоящего изобретения, при этом способ управления включает в себя следующие этапы.
[0111] На этапе S402 получают первый набор данных, обнаруженный первым компонентом обнаружения, при этом первый набор данных используют для указания рабочих параметров режущего органа.
[0112] На этапе S404 получают первый заданный коэффициент соотношения между сопротивлением нагрузки при резании и скоростью поворота режущего органа.
[0113] На этапе S406 определяют первое сопротивление нагрузки при резании согласно току двигателя для режущего органа и определяют первое прогнозируемое значение скорости поворота согласно первому сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения.
[0114] На этапе S408 получают второй заданный коэффициент соотношения между вибрационным ускорением режущего органа и сопротивлением нагрузки при резании.
[0115] На этапе S410 определяют сопротивление нагрузки при резании согласно второму заданному коэффициенту соотношения и вибрационному ускорению режущего органа и определяют второе прогнозируемое значение скорости поворота согласно второму сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения.
[0116] На этапе S412 определяют третье сопротивление нагрузки при резании согласно давлению в масляном тракте масляного цилиндра и определяют третье прогнозируемое значение скорости поворота согласно третьему сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения.
[0117] На этапе S414 определяют прогнозируемое значение скорости поворота согласно первому прогнозируемому значению скорости поворота, второму прогнозируемому значению скорости поворота и третьему прогнозируемому значению скорости поворота.
[0118] На этапе S416 получают второй набор данных, обнаруженный вторым компонентом обнаружения, при этом второй набор данных используют для указания параметров положения корпуса машины.
[0119] На этапе S418 определяют целевое значение скорости поворота согласно прогнозируемому значению скорости поворота и второму набору данных и управляют органом для поворота согласно целевому значению скорости поворота.
[0120] В этом варианте реализации конкретный этап, на котором управляющее устройство определяет второе сопротивление нагрузки при резании согласно вибрационному ускорению режущего органа, включает подэтап, на котором: управляющее устройство сначала получает второй заданный коэффициент соотношения между вибрационным ускорением режущего органа с режущей головкой и сопротивление нагрузки при резании; а затем вычисляет второе сопротивление нагрузки при резании согласно второму заданному коэффициенту соотношения в сочетании с вибрационным ускорением режущего органа.
[0121] Понятно, что второй заданный коэффициент соотношения задан согласно информации об оборудовании горнопроходческой машины и фактическим производственным условиям горнопроходческой машины и может быть предварительно сохранен в устройстве хранения; при этом для вычисления второго сопротивления нагрузки при резании управляющее устройство получает второй заданный коэффициент соотношения из устройства хранения, а затем вычисляет второе сопротивление нагрузки при резании.
[0122] В частности, формула для вычисления второго сопротивление нагрузки при резании согласно вибрационному ускорению режущего органа имеет следующий вид.
[0123] В приведенной выше формуле F2 используется для представления второго сопротивления нагрузки при резании, к используется для представления второго заданного коэффициента соотношения и а используется для представления вибрационного ускорения режущего органа.
[0124] На ФИГ. 5 схематически представлена блок-схема способа управления горнопроходческой машиной согласно одному варианту реализации настоящего изобретения, при этом способ управления включает следующие этапы.
[0125] На этапе S502 получают первый набор данных, обнаруженный первым компонентом обнаружения, при этом первый набор данных используют для указания рабочих параметров режущего органа.
[0126] На этапе S504 получают первый заданный коэффициент соотношения между сопротивлением нагрузки при резании и скоростью поворота режущего органа.
[0127] На этапе S506 определяют первое сопротивление нагрузки при резании согласно току двигателя для режущего органа и определяют первое прогнозируемое значение скорости поворота согласно первому сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения.
[0128] На этапе S508 определяют второе сопротивление нагрузки при резании согласно вибрационному ускорению режущего органа и определяют второе прогнозируемое значение скорости поворота согласно второму сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения.
[0129] На этапе S510 определяют смещение поршня в масляном цилиндре согласно давлению в масляном тракте масляного цилиндра.
[0130] На этапе S512 получают эффективную площадь камеры масляного цилиндра, падение давления на нагрузке, полную массу нагрузки и поршня в масляном цилиндре, коэффициенты вязкостного демпфирования нагрузки и поршня в масляном цилиндре и жесткость нагрузочной пружины.
[0131] На этапе S514 определяют третье сопротивление нагрузки при резании согласно эффективной площади камеры масляного цилиндра, падению давления на нагрузке, полной массе нагрузки и поршня в масляном цилиндре, коэффициентам вязкостного демпфирования нагрузки и поршня в масляном цилиндре, жесткости нагрузочной пружины и смещению поршня в масляном цилиндре и определяют третье прогнозируемое значение скорости поворота согласно третьему сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения.
[0132] На этапе S516 определяют прогнозируемое значение скорости поворота согласно первому прогнозируемому значению скорости поворота, второму прогнозируемому значению скорости поворота и третьему прогнозируемому значению скорости поворота.
[0133] На этапе S518 получают второй набор данных, обнаруженный вторым компонентом обнаружения, при этом второй набор данных используют для указаничя параметров положения корпуса машины.
[0134] На этапе S520 определяют целевое значение скорости поворота согласно прогнозируемому значению скорости поворота и второму набору данных и управляют режущим органом для его поворота согласно целевому значению скорости поворота.
[0135] В этом варианте реализации конкретный этап, на котором управляющее устройство определяет третье сопротивление нагрузки при резании согласно давлению в масляном тракте масляного цилиндра, включает подэтап, на котором: управляющее устройство определяет смещение поршня в масляном цилиндре согласно давлению в масляном тракте масляного цилиндра и получает эффективную площадь камеры масляного цилиндра, падение давления на нагрузке, полную массу нагрузки и поршня в масляном цилиндре, коэффициенты вязкостного демпфирования нагрузки и поршня в масляном цилиндре, жесткость нагрузочной пружины и смещение поршня в масляном цилиндре для определения третьего сопротивления нагрузки при резании.
[0136] Понятно, что третье сопротивление нагрузки при резании, определенное согласно эффективной площади камеры масляного цилиндра, падения давления на нагрузке, полной массы нагрузки и поршня в масляном цилиндре, коэффициентов вязкостного демпфирования нагрузки и поршня в масляном цилиндре, жесткости нагрузочной пружины и смещения поршня в масляном цилиндре, может быть определено согласно информации об оборудовании горнопроходческой машины и фактическим рабочим условиям горнопроходческой машины.
[0137] Кроме того, управляющее устройство вычисляет третье сопротивление нагрузки при резании согласно эффективной площади камеры масляного цилиндра, падению давления на нагрузке, полной массе нагрузки и поршня в масляном цилиндре, коэффициентам вязкостного демпфирования нагрузки и поршня в масляном цилиндре, жесткости нагрузочной пружины и смещению поршня в масляном цилиндре, при этом формула вычисления имеет следующий вид:

[0138] В представленной выше формуле F3 используется для представления третьего сопротивления нагрузки при резании, Ak используется для представления эффективной площади камеры масляного цилиндра, PL используется для представления падения давления на нагрузке, mt используется для представления полной массы нагрузки и поршня в масляном цилиндре, Bp используется для представления коэффициентов вязкостного демпфирования нагрузки и поршня в масляном цилиндре, K используется для представления жесткости нагрузочной пружины, t используется для представления времени, и L используется для представления смещения поршня в масляном цилиндре, определенном согласно давлению в масляном тракте масляного цилиндра.
[0139] На ФИГ. 6 схематически представлена блок-схема способа управления горнопроходческой машиной согласно одному варианту реализации настоящего изобретения, при этом способ управления включает в себя следующие этапы.
[0140] На этапе S602 получают первый набор данных, обнаруженный первым компонентом обнаружения, при этом первый набор данных используют для указания рабочих параметров режущего органа.
[0141] На этапе S604 получают первый заданный коэффициент соотношения между сопротивлением нагрузки при резании и скоростью поворота режущего органа.
[0142] На этапе S606 определяют первое сопротивление нагрузки при резании согласно току двигателя для режущего органа, и определяют первое прогнозируемое значение скорости поворота согласно первому сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения.
[0143] На этапе S608 определяют второе сопротивление нагрузки при резании согласно вибрационному ускорению режущего органа, а второе прогнозируемое значение скорости поворота определяют согласно второму сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения.
[0144] На этапе S610 определяют третье сопротивление нагрузки при резании согласно давлению в масляном тракте масляного цилиндра, и определяют третье прогнозируемое значение скорости поворота согласно третьему сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения.
[0145] На этапе S612 одно и то же прогнозируемое значение определяют как прогнозируемое значение скорости поворота в случае, когда части или все из первого прогнозируемого значения скорости поворота, второго прогнозируемого значения скорости поворота и третьего прогнозируемого значения скорости поворота являются одними и теми же; или прогнозируемое значение с самым высоким приоритетом определяют как прогнозируемое значение скорости поворота в случае, когда все из первого прогнозируемого значения скорости поворота, второго прогнозируемого значения скорости поворота и третьего прогнозируемого значения скорости поворота являются различными.
[0146] На этапе S614 получают второй набор данных, обнаруженный вторым компонентом обнаружения, при этом второй набор данных используют для указания параметров положения корпуса машины.
[0147] На этапе S616 определяют целевое значение скорости поворота согласно прогнозируемому значению скорости поворота и второму набору данных, а режущим органом управляют для его поворота согласно целевому значению скорости поворота.
[0148] Согласно одному варианту реализации конкретный этап, на котором управляющее устройство определяет конечное прогнозируемое значение скорости поворота согласно указанным трем прогнозируемым значениям, т.е. первому прогнозируемому значению скорости поворота, второму прогнозируемому значению скорости поворота и третьему прогнозируемому значению скорости поворота, включает подэтап, на котором: одно и то же прогнозируемое значение используют в качестве конечного прогнозируемого значения скорости поворота в случае, когда части или все из первого прогнозируемого значения скорости поворота, второго прогнозируемого значения скорости поворота и третьего прогнозируемого значения скорости поворота являются одними и теми же, т.е. следуя принципу "меньшинство подчиняется большинству". Прогнозируемое значение с самым высоким приоритетом используется в качестве конечного прогнозируемого значения скорости поворота в случае, когда первое прогнозируемое значение скорости поворота, второе прогнозируемое значение скорости поворота и третье прогнозируемое значение скорости поворота являются различными, т.е. следуют принципу "защиты приоритета".
[0149] Следует отметить, что приоритет прогнозируемого значения определяется согласно источнику вычисления, т.е. он определяется согласно току двигателя для режущего органа, вибрационному ускорению режущего органа и давлению в масляном тракте масляного цилиндра, а приоритет тока двигателя для режущего органа, вибрационного ускорения режущего органа и давления в масляном тракте масляного цилиндра определен согласно фактическим производственным условиям горнопроходческой машины.
[0150] В этом варианте реализации управляющее устройство определяет три прогнозируемых значения скорости поворота режущего органа соответственно согласно току двигателя для режущего органа, вибрационному ускорению режущего органа и давлению в масляном тракте масляного цилиндра и определяет конечное прогнозируемое значение скорости поворота из этих трех прогнозируемых значений, следуя принципу "меньшинство подчиняется большинству" и принципу "защиты приоритета", и, таким образом, повышается точность определения прогнозируемого значения скорости поворота.
[0151] На ФИГ. 7 схематически представлена блок-схема способа управления горнопроходческой машиной согласно одному варианту реализации настоящего изобретения, при этом способ управления включает в себя следующие этапы.
[0152] На этапе S702 получают первый набор данных, обнаруженный первым компонентом обнаружения, при этом первый набор данных используется для указания рабочих параметров режущего органа.
[0153] На этапе S704 определяют прогнозируемое значение скорости поворота согласно первому набору данных.
[0154] На этапе S706 получают второй набор данных, обнаруженный вторым компонентом обнаружения, при этом второй набор данных используется для указания параметров положения корпуса машины.
[0155] На этапе S708 определяют прогнозируемое значение смещения курсового угла корпуса машины, прогнозируемое значение смещения угла продольного наклона корпуса машины, прогнозируемое значение поперечного смещения корпуса машины и прогнозируемое значение продольного смещения корпуса машины согласно прогнозируемому значению скорости поворота.
[0156] На этапе S710 подтверждают, согласованы ли прогнозируемое значение смещения курсового угла корпуса машины, прогнозируемое значение смещения угла продольного наклона корпуса машины, прогнозируемое значение поперечного смещения корпуса машины и прогнозируемое значение продольного смещения корпуса машины со значением смещения курсового угла корпуса машины, значением смещения угла продольного наклона корпуса машины, значением поперечного смещения корпуса машины и значением продольного смещения корпуса машины во втором наборе данных.
[0157] На этапе S712 определяют прогнозируемое значение скорости поворота в качестве целевого значения скорости поворота в случае, когда любое из прогнозируемых значений согласовано с параметрами во втором наборе данных.
[0158] В этом варианте реализации конкретный этап, на котором управляющее устройство определяет целевую скорость поворота согласно прогнозируемому значению скорости поворота и второму набору данных, включает подэтап, на котором: управляющее устройство оценивает прогнозируемое значение смещения курсового угла корпуса машины, прогнозируемое значение смещения угла продольного наклона корпуса машины, прогнозируемое значение поперечного смещения корпуса машины и прогнозируемое значение продольного смещения корпуса машины согласно прогнозируемому значению скорости поворота, т.е. оно прогнозирует параметры положения корпуса горнопроходческой машины согласно прогнозируемому значению скорости поворота.
[0159] Кроме того, после прогнозирования параметров положения корпуса горнопроходческой машины согласно прогнозируемому значению скорости поворота управляющее устройство решает, согласованы ли части или все из прогнозируемого значения смещения курсового угла корпуса машины, прогнозируемого значения смещения угла продольного наклона корпуса машины, прогнозируемого значения поперечного смещения корпуса машины и прогнозируемого значения продольного смещения корпуса машины в параметрах положения корпуса горнопроходческой машины со смещением курсового угла корпуса машины, смещением угла продольного наклона корпуса машины, поперечным смещением корпуса машины и продольным смещением корпуса машины во втором наборе данных, и если любое из прогнозируемых значений согласовано с параметрами положения во втором наборе данных, упомянутое выше прогнозируемое значение скорости поворота определяют как целевое значение скорости поворота для управления поворотом режущего органа.
[0160] В этом варианте реализации управляющее устройство прогнозирует параметры положения корпуса горнопроходческой машины согласно прогнозируемому значению скорости поворота и затем выносит решение в сочетании с параметрами положения во втором наборе данных, и наконец определяет, используется или не используется прогнозируемое значение скорости поворота в качестве целевого значения скорости поворота, так что точность определяемого целевого значения скорости поворота, используемого для управления поворотом режущего органа, повышается, и, таким образом, улучшаются безопасность труда и надежность горнопроходческой машины.
[0161] Вариант 2 реализации
[0162] На ФИГ. 8 схематически представлена принципиальная схема управляющего устройства для горнопроходческой машины согласно одному варианту реализации настоящего изобретения, при этом управляющее устройство 800 для горнопроходческой машины включает в себя: блок 802 получения, выполненный с возможностью получения первого набора данных, обнаруженных первым компонентом обнаружения, при этом первый набор данных используется для указания рабочих параметров режущего органа; блок 804 обработки, выполненный с возможностью определения прогнозируемого значения скорости поворота согласно первому набору данных; кроме того, блок 802 получения выполнен с возможностью получения второго набора данных, обнаруженных вторым компонентом обнаружения, при этом второй набор данных используется для указания параметров положения корпуса машины; кроме того, блок 804 обработки выполнен с возможностью определения целевого значения скорости поворота согласно прогнозируемому значению скорости поворота и второму набору данных и управления режущим органом для его поворота согласно целевому значению скорости поворота.
[0163] В этом варианте реализации первый набор данных используется для указания рабочих параметров режущего органа, таких как ток двигателя для режущего органа, вибрационное ускорение режущего органа и давление в масляном тракте масляного цилиндра. Второй набор данных используется для указания параметров положения корпуса горнопроходческой машины, таких как смещение курсового угла корпуса машины, смещение угла продольного наклона корпуса машины, поперечное смещение корпуса машины и продольное смещение корпуса машины.
[0164] В частности, блок 802 получения получает первый набор данных, обнаруженный первым компонентом обнаружения, а блок 804 обработки определяет прогнозируемое значение скорости поворота согласно первому набору данных. В частности, первый компонент обнаружения состоит из множества датчиков, соответственно соединенных с управляющим устройством; блок 802 получения получает первый набор данных посредством множества датчиков; и после получения первого набора данных блок 804 обработки оценивает скорость поворота режущего органа согласно соответствующим рабочим параметрам режущего органа для определения прогнозируемого значения скорости поворота режущего органа.
[0165] Кроме того, блок 802 получения дополнительно выполнен с возможностью получения второго набора данных, обнаруженных вторым компонентом обнаружения, после того, как блок 804 обработки определит прогнозируемое значение скорости поворота режущего органа, при этом блок 804 обработки дополнительно выполнен с возможностью определения целевого значения скорости поворота согласно второму набору данных и упомянутому выше прогнозируемому значению скорости поворота для управления поворотом режущего органа. Понятно, что второй компонент обнаружения также состоит из множества датчиков, соответственно соединенных с управляющим устройством; блок 802 получения получает второй набор данных посредством множества датчиков; после получения второго набора данных блок 804 обработки определяет целевое значение скорости поворота согласно прогнозируемому значению скорости поворота и соответствующим параметрам положения режущего органа во втором наборе данных, так что режущий орган поворачивается согласно целевому значению скорости поворота.
[0166] В уровне техники изменение тока двигателя для режущего органа обычно обнаруживается датчиком тока, и затем скорость поворота режущего органа оценивается и управляется согласно току двигателя для режущего органа. Это решение приводит к снижению точности, и если датчик тока допускает ошибку, скорость поворота режущего органа невозможно оценивать и управлять ею.
[0167] Таким образом, в настоящем варианте реализации блок 804 обработки определяет прогнозируемое значение скорости поворота согласно первому набору данных, полученному блоком 802 получения, и затем определяет целевое значение скорости поворота, объединяя второй набор данных, полученный блоком 802 получения, с прогнозируемым значением скорости поворота, при этом первый набор данных используется для указания рабочих параметров режущего органа, а второй набор данных используется для указания параметров положения корпуса машины. Таким образом, в настоящем варианте реализации блок 804 обработки оценивает скорость поворота режущего органа и управляет ею согласно двум параметрам, т.е. рабочим параметрам режущего органа и параметрам положения корпуса горнопроходческой машины, что улучшает оценку скорости поворота режущего органа и точность управления ею. В то же время, следует понимать, что каждый из первого набора данных и второго набора данных включает в себя больше чем один параметр, и можно заметить из этого, что в настоящем варианте реализации используется множество датчиков для обнаружения рабочих параметров режущего органа и обнаружения корпуса горнопроходческой машины, т.е. когда определенный датчик допускает ошибку, оценка скорости поворота режущего органа и управление ею не ухудшаются, и, таким образом, гарантируются безопасность труда и надежность горнопроходческой машины.
[0168] Кроме того, в этом варианте реализации на этапе определения прогнозируемого значения скорости поворота согласно первому набору данных блок 802 получения дополнительно выполнен с возможностью получения первого заданного коэффициента соотношения между сопротивлением нагрузки при резании и скоростью поворота режущего органа; при этом блок 804 обработки дополнительно выполнен с возможностью: определения первого сопротивления нагрузки при резании согласно току двигателя для режущего органа и определения первого прогнозируемого значения скорости поворота согласно первому сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения; определения второго сопротивления нагрузки при резании согласно вибрационному ускорению режущего органа и определения второго прогнозируемого значения скорости поворота согласно второму сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения; определения третьего сопротивления нагрузки при резании согласно давлению в масляном тракте масляного цилиндра и определения третьего прогнозируемого значения скорости поворота согласно третьему сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения; определения прогнозируемого значения скорости поворота согласно первому прогнозируемому значению скорости поворота, второму прогнозируемому значению скорости поворота и третьему прогнозируемому значению скорости поворота.
[0169] Кроме того, в этом варианте реализации на этапе определения первого сопротивления нагрузки при резании согласно току двигателя для режущего органа блок 802 получения дополнительно выполнен с возможностью получения диаметра режущей головки, значения скорости вращения двигателя для режущего органа и входного напряжения двигателя для режущего органа; и блок 804 обработки дополнительно выполнен с возможностью определения первого сопротивления нагрузки при резании согласно диаметру режущей головки, скорости вращения двигателя для режущего органа, входному напряжению двигателя для режущего органа и току двигателя для режущего органа.
[0170] Кроме того, в этом варианте реализации на этапе определения второго сопротивления нагрузки при резании согласно вибрационному ускорению режущего органа блок 802 получения дополнительно выполнен с возможностью получения второго заданного коэффициента соотношения между вибрационным ускорением режущего органа и сопротивлением нагрузки при резании; а блок 804 обработки дополнительно выполнен с возможностью определения второго сопротивления нагрузки при резании согласно второму заданному коэффициенту соотношения и вибрационному ускорению режущего органа.
[0171] Кроме того, в этом варианте реализации на этапе определения третьего сопротивления нагрузки при резании согласно давлению в масляном тракте масляного цилиндра блок 804 обработки дополнительно выполнен с возможностью определения смещения поршня в масляном цилиндре согласно давлению в масляном тракте масляного цилиндра; блок 802 получения дополнительно выполнен с возможностью получения эффективной площади камеры масляного цилиндра, падения давления на нагрузке, полной массы нагрузки и поршня в масляном цилиндре, коэффициентов вязкостного демпфирования нагрузки и поршня в масляном цилиндре и жесткости нагрузочной пружины; а блок 804 обработки дополнительно выполнен с возможностью определения третьего сопротивления нагрузки при резании согласно эффективной площади камеры масляного цилиндра, падению давления на нагрузке, полной массе нагрузки и поршня в масляном цилиндре, коэффициентам вязкостного демпфирования нагрузки и поршня в масляном цилиндре, жесткости нагрузочной пружины и смещению поршня в масляном цилиндре.
[0172] Кроме того, в этом варианте реализации на этапе определения прогнозируемого значения скорости поворота согласно первому прогнозируемому значению скорости поворота, второму прогнозируемому значению скорости поворота и третьему прогнозируемому значению скорости поворота блок 804 обработки, в частности, выполнен с возможностью: определения одного и того же прогнозируемого значения в качестве прогнозируемого значения скорости поворота в случае, когда части или все из первого прогнозируемого значения скорости поворота, второго прогнозируемого значения скорости поворота и третьего прогнозируемого значения скорости поворота являются одними и теми же; или определения прогнозируемого значения с самым высоким приоритетом в качестве прогнозируемого значения скорости поворота в случае, когда все из первого прогнозируемого значения скорости поворота, второго прогнозируемого значения скорости поворота и третьего прогнозируемого значения скорости поворота являются различными.
[0173] Кроме того, в этом варианте реализации на этапе определения целевого значения скорости поворота согласно прогнозируемому значению скорости поворота и второму набору данных блок 804 обработки, в частности, выполнен с возможностью: определения прогнозируемого значения смещения курсового угла корпуса машины, прогнозируемого значения смещения угла продольного наклона корпуса машины, прогнозируемого значения поперечного смещения корпуса машины и прогнозируемого значения продольного смещения корпуса машины согласно прогнозируемому значению скорости поворота; подтверждения того, согласованы ли прогнозируемое значение смещения курсового угла корпуса машины, прогнозируемое значение смещения угла продольного наклона корпуса машины, прогнозируемое значение поперечного смещения корпуса машины и прогнозируемое значение продольного смещения корпуса машины ными со значением смещения курсового угла корпуса машины, значением смещения угла продольного наклона корпуса машины, значением поперечного смещения корпуса машины и значением продольного смещения корпуса машины во втором наборе данных; и определения прогнозируемого значения скорости поворота в качестве целевого значения скорости поворота в случае, когда любое из прогнозируемых значений согласовано с параметрами во втором наборе данных.
[0174] Вариант 3 реализации
[0175] Согласно третьему варианту реализации настоящего изобретения предложен читаемый носитель для хранения, при этом в читаемом носителе для хранения хранится программа или инструкция, которая при ее исполнении процессором осуществляет способ управления горнопроходческой машиной, предложенный в упомянутом выше варианте реализации. Таким образом, читаемый носитель для хранения имеет все обеспечивающие преимущество эффекты способа управления горнопроходческой машиной в упомянутом выше варианте реализации, которые не будут описаны подробно в данном случае.
[0176] Вариант 4 реализации
[0177] На ФИГ. 9 схематически показана функциональная схема горнопроходческой машины согласно одному варианту реализации настоящего изобретения, при этом горнопроходческая машина 900 включает в себя: корпус 902 машины; режущий орган 904, расположенный на корпусе 902 машины; масляный цилиндр 906, соединенный с режущим органом 904 и выполненный с возможностью приведения в действие режущего органа 904 для поворота; первый компонент 908 обнаружения, выполненный с возможностью обнаружения первого набора данных, используемого для указания рабочих параметров режущего органа 904; второй компонент 910 обнаружения, выполненный с возможностью обнаружения второго набора данных, используемого для указания параметров положения корпуса 902 машины.
[0178] Кроме того, упомянутая выше горнопроходческая машина 900 дополнительно включает в себя управляющее устройство 800 для горнопроходческой машины, предложенной в упомянутом выше варианте реализации, и/или читаемый носитель 912 для хранения, предложенный в упомянутом выше варианте реализации, так что горнопроходческая машина 900 имеет все обеспечивающие преимущество эффекты управляющего устройства 800 горнопроходческой машины, предложенной в упомянутом выше варианте реализации, или читаемого носителя 912 для хранения, предложенного в упомянутом выше варианте реализации, которые не будут описаны подробно в данном случае.
[0179] Вариант 5 реализации
[0180] Настоящий вариант реализации приводит для примера способ управления горнопроходческой машиной, предложенной в настоящей заявке, со ссылкой на ФИГ. 10.
[0181] Как показано на ФИГ. 10, согласно способу управления горнопроходческой машиной, предложенному в этом варианте реализации, слой вычисления получает ток двигателя для режущего органа, вибрационное ускорение режущего органа и давление в масляном тракте масляного цилиндра в рабочих параметрах горнопроходческой машины, соответственно вводит все указанное выше в модуль анализа тока врубового двигателя, модуль анализа вибрационного ускорения режущего органа и модуль анализа масляного тракта масляного цилиндра, соответственно вычисляет первое прогнозируемое значение скорости поворота, второе прогнозируемое значение скорости поворота и третье прогнозируемое значение скорости поворота и вводит упомянутые выше три прогнозируемых значения в избирающее устройство для выбора, а избирающее устройство: определяет одно и то же прогнозируемое значение в качестве прогнозируемого значения скорости поворота в случае, когда части или все из первого прогнозируемого значения скорости поворота, второго прогнозируемого значения скорости поворота и третьего прогнозируемого значения скорости поворота являются одними и теми же; или определяет прогнозируемое значение с самым высоким приоритетом в качестве прогнозируемого значения скорости поворота в случае, когда все из первого прогнозируемого значения скорости поворота, второго прогнозируемого значения скорости поворота и третьего прогнозируемого значения скорости поворота являются различными.
[0182] Кроме того, после определения прогнозируемого значения скорости поворота избирающее устройство отправляет прогнозируемое значение скорости поворота в логический решающий слой для логического решения. В частности, логический решающий слой включает в себя модуль анализа смещения курсового угла корпуса машины, модуль анализа смещения угла продольного наклона корпуса машины, модуль анализа поперечного смещения корпуса машины и модуль анализа продольного смещения корпуса машины, предназначенные для анализа.
[0183] В частности, логический решающий слой соответственно оценивает прогнозируемое значение смещения курсового угла корпуса машины, прогнозируемое значение смещения угла продольного наклона корпуса машины, прогнозируемое значение поперечного смещения корпуса машины и прогнозируемое значение продольного смещения корпуса машины согласно прогнозируемому значению скорости поворота, т.е. он прогнозирует параметры положения корпуса горнопроходческой машины согласно прогнозируемому значению скорости поворота. Затем, выносится решение о том, согласованы ли прогнозируемое значение смещения курсового угла корпуса машины, прогнозируемое значение смещения угла продольного наклона корпуса машины, прогнозируемое значение поперечного смещения корпуса машины и прогнозируемое значение продольного смещения корпуса машины, содержащиеся в параметрах положения корпуса горнопроходческой машины, со значением смещения курсового угла корпуса машины, значением смещения угла продольного наклона корпуса машины, значением поперечного смещения корпуса машины и значением продольного смещения корпуса машины, содержащихся во втором наборе данных, определяется результат анализа и отправляется к избирающему устройству.
[0184] Избирающее устройство определяет упомянутое выше прогнозируемое значение скорости поворота как целевое значение скорости поворота для управления поворотом режущего органа в случае, когда подтверждено, что любое из прогнозируемых значений в результате решения согласовано с параметрами положения, находящимися во втором наборе данных.
[0185] В описании настоящей спецификации термины "первый" и "второй" используются только для описательных целей, но не могут быть поняты как указывающие или подразумевающие относительную важность, если явно не указано или не ограничено иное; а термины "соединенный", "установленный", "прикрепленный" и т.п. следует понимать в широком смысле, например, "соединенный" может означать "прочно соединенный", " соединенный разъединяемым способом" или " соединенный как единое целое"; а также это может означать непосредственное соединение или опосредованное соединение с использованием промежуточной среды. Для специалистов в данной области конкретное значение упомянутых выше терминов в настоящем документе может быть понято в соответствии с конкретными ситуациями.
[0186] В описании настоящей спецификации термины "один вариант реализации", "некоторые варианты реализации", "конкретные варианты реализации" и т.п. означают, что конкретный признак, структура, материал или характеристика, описанные в соединении с этим вариантом реализации или примером, включены по меньшей мере в один вариант реализации или пример в настоящем документе. В настоящей спецификации схематические представления для упомянутых выше терминов не обязательно относятся к одному и тому же варианту реализации или примеру. Кроме того, описанный конкретный признак, структура, материал или характеристика могут быть объединены любым подходящим образом в любых одном или более вариантах реализации или примерах.
[0187] Кроме того, технические решения в различных вариантах реализации настоящего изобретения могут быть объединены друг с другом, но требуется, чтобы они были реализуемы для специалистов в данной области техники, а когда технические решения противоречат друг другу во время сочетания или не могут быть объединены, следует считать, что сочетание технических решений не существует и не находится в пределах объема охраны, заявленного в настоящем документе.
[0188] Изложенное выше является просто предпочтительными вариантами реализации настоящего изобретения и не предназначено для ограничения настоящего изобретения, так что различные модификации и изменения в настоящем документе могут быть выполнены специалистами в данной области техники. Любые изменения, эквивалентные замены, усовершенствования и т.п. в пределах идеи и принципа настоящего изобретения должны находиться в пределах объема охраны настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНОК ДЛЯ КРЕПЛЕНИЯ БОЛТОВ КРОВЛИ ГОРНОПРОХОДЧЕСКОЙ МАШИНЫ | 2014 |
|
RU2643053C2 |
| СИСТЕМА ГИДРОЭЛЕКТРИЧЕСКОЙ СВЯЗИ И ГОРНОПРОХОДЧЕСКАЯ МАШИНА, СОДЕРЖАЩАЯ СИСТЕМУ ГИДРОЭЛЕКТРИЧЕСКОЙ СВЯЗИ | 2022 |
|
RU2804091C1 |
| АВТОМАТИЗИРОВАННЫЕ ОПЕРАЦИИ ГОРНОЙ МАШИНЫ | 2012 |
|
RU2617498C2 |
| ЗАГРЕБАЮЩАЯ ГОЛОВКА ГОРНОПРОХОДЧЕСКОЙ МАШИНЫ | 2014 |
|
RU2646259C2 |
| ГОРНОПРОХОДЧЕСКАЯ ИЛИ ВЫЕМОЧНАЯ МАШИНА | 2013 |
|
RU2618815C2 |
| ГИДРАВЛИЧЕСКАЯ ФОРМОВОЧНАЯ МАШИНА И МАШИНА ДЛЯ ФОРМОВАНИЯ МЕТАЛЛИЧЕСКИХ ШАРИКОВ | 2017 |
|
RU2732301C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2013 |
|
RU2526437C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ДЛЯ ГОРНОЙ МАШИНЫ | 2012 |
|
RU2618005C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ПРОХОДЧЕСКОЙ МАШИНЫ И ПРОХОДЧЕСКАЯ МАШИНА | 2022 |
|
RU2808069C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ДЛЯ ГОРНОЙ МАШИНЫ | 2012 |
|
RU2740182C2 |
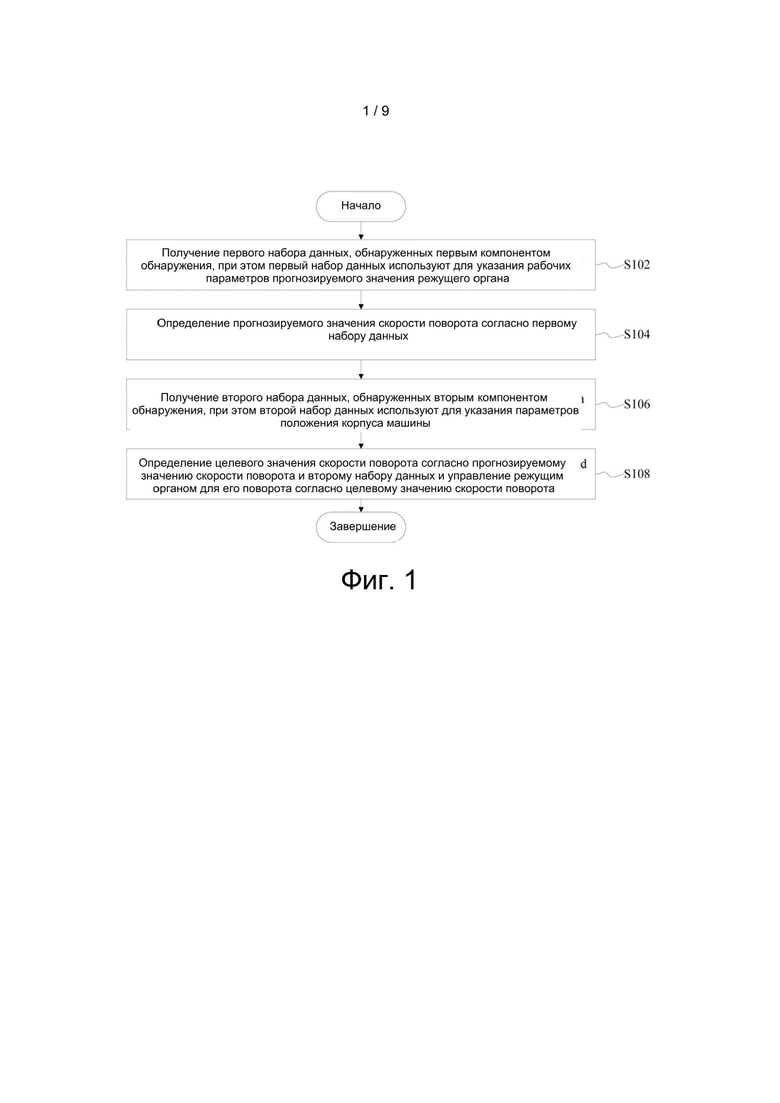
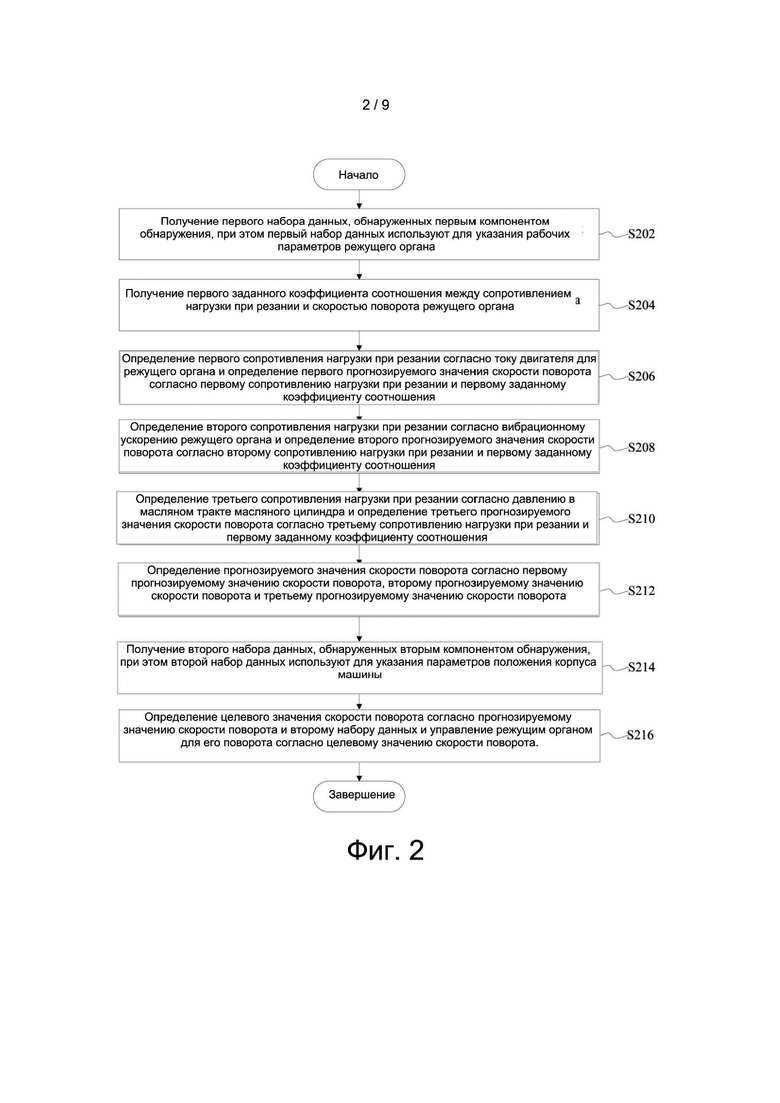
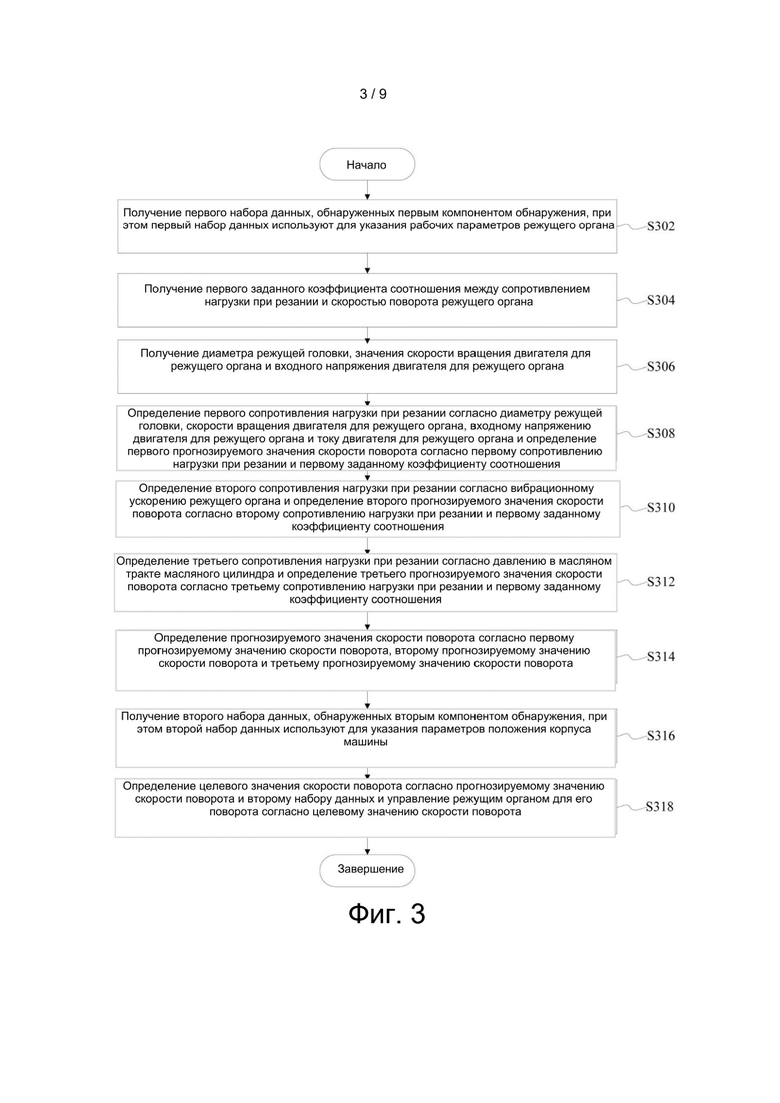
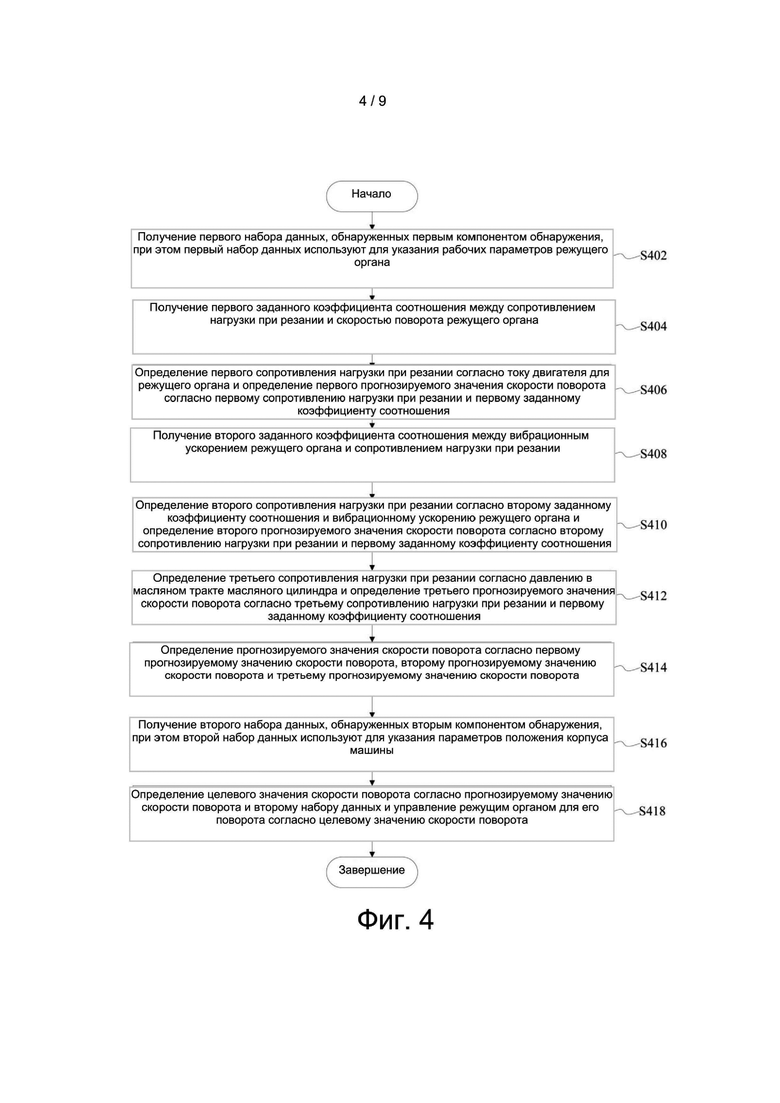
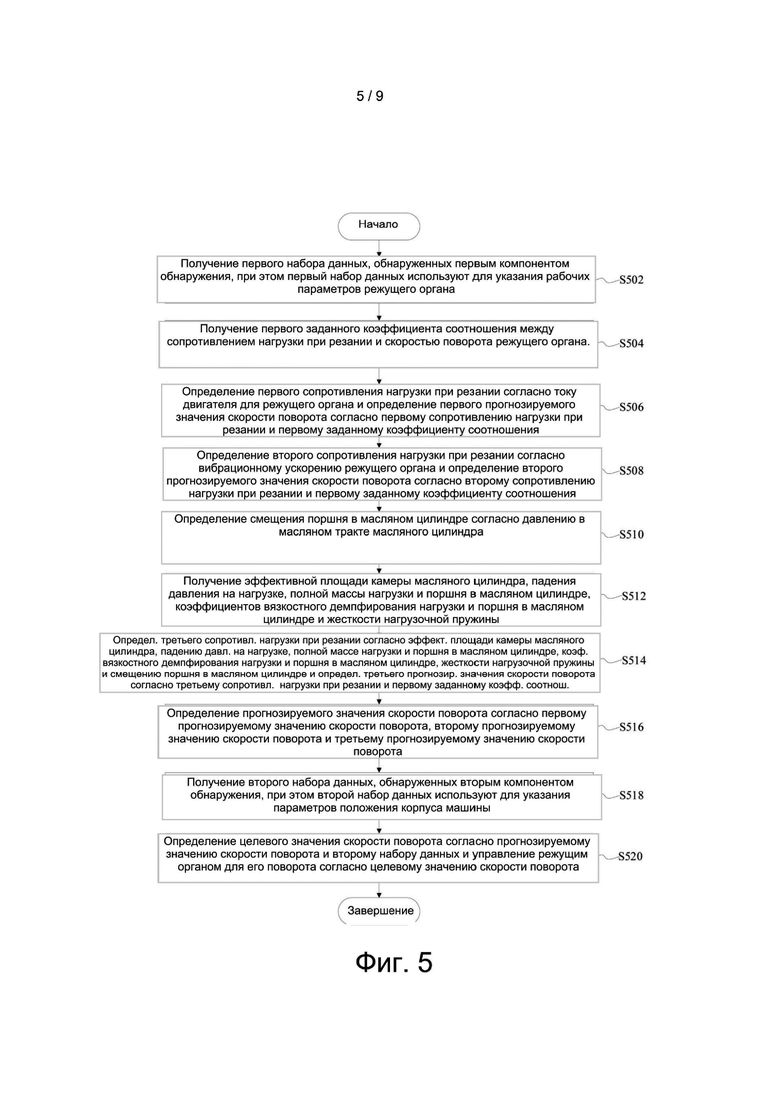
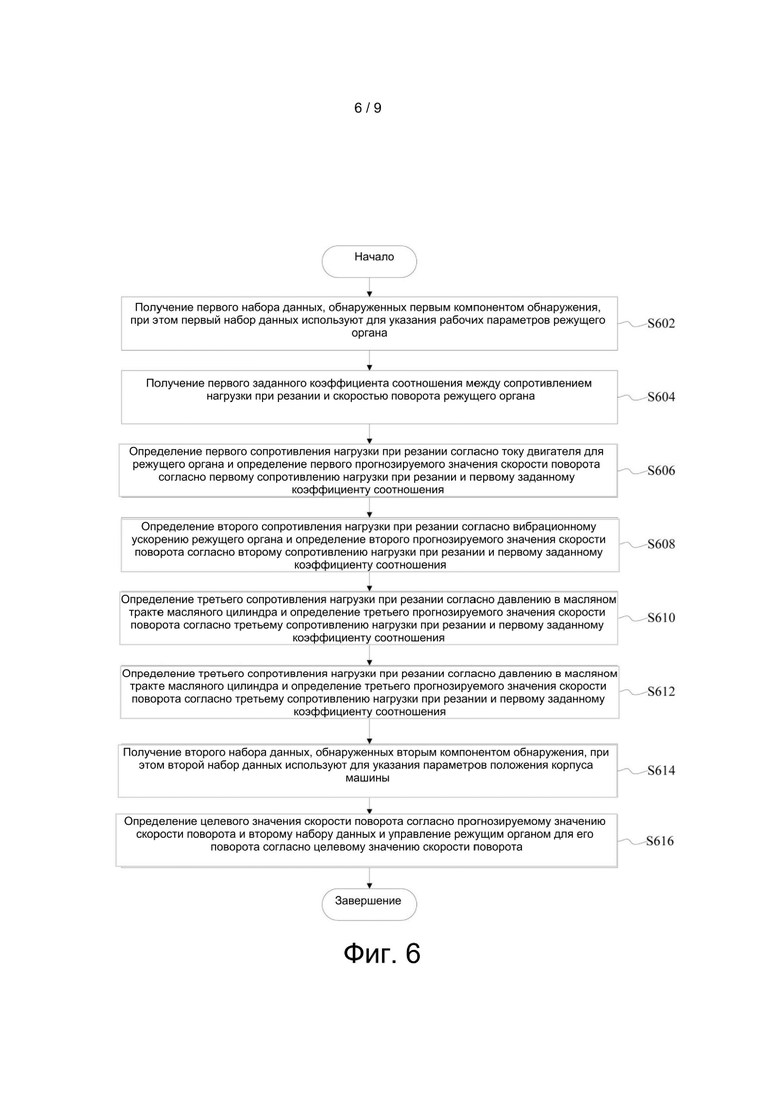
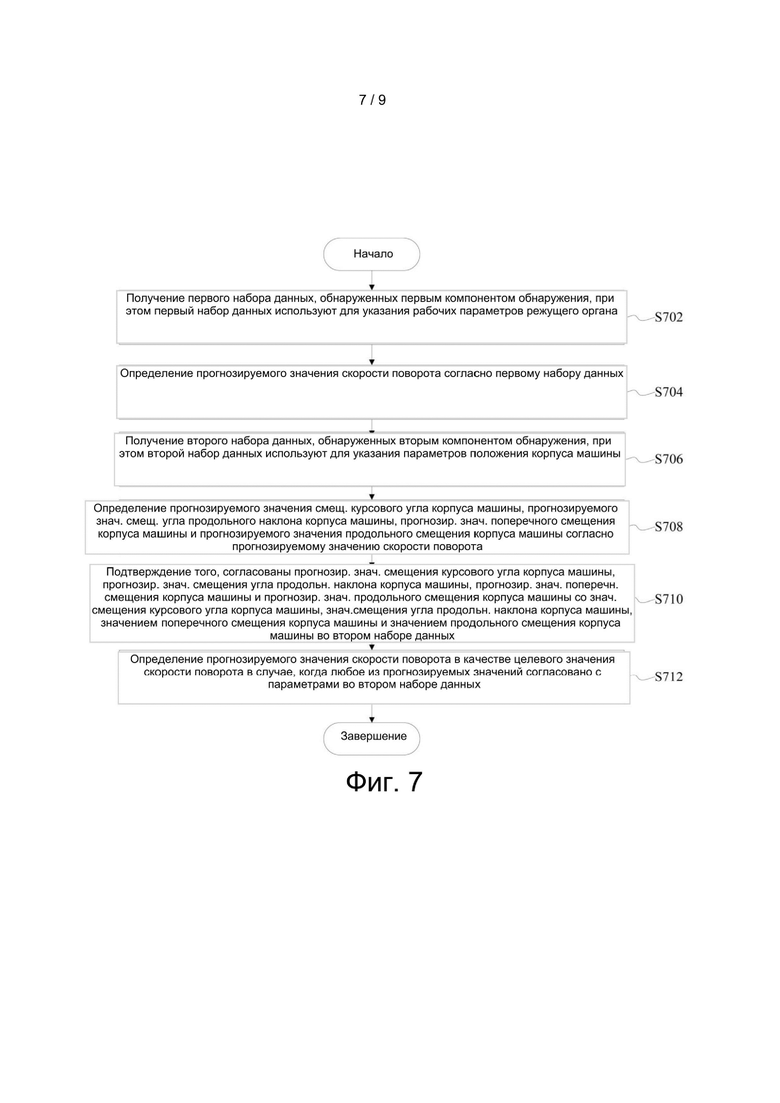
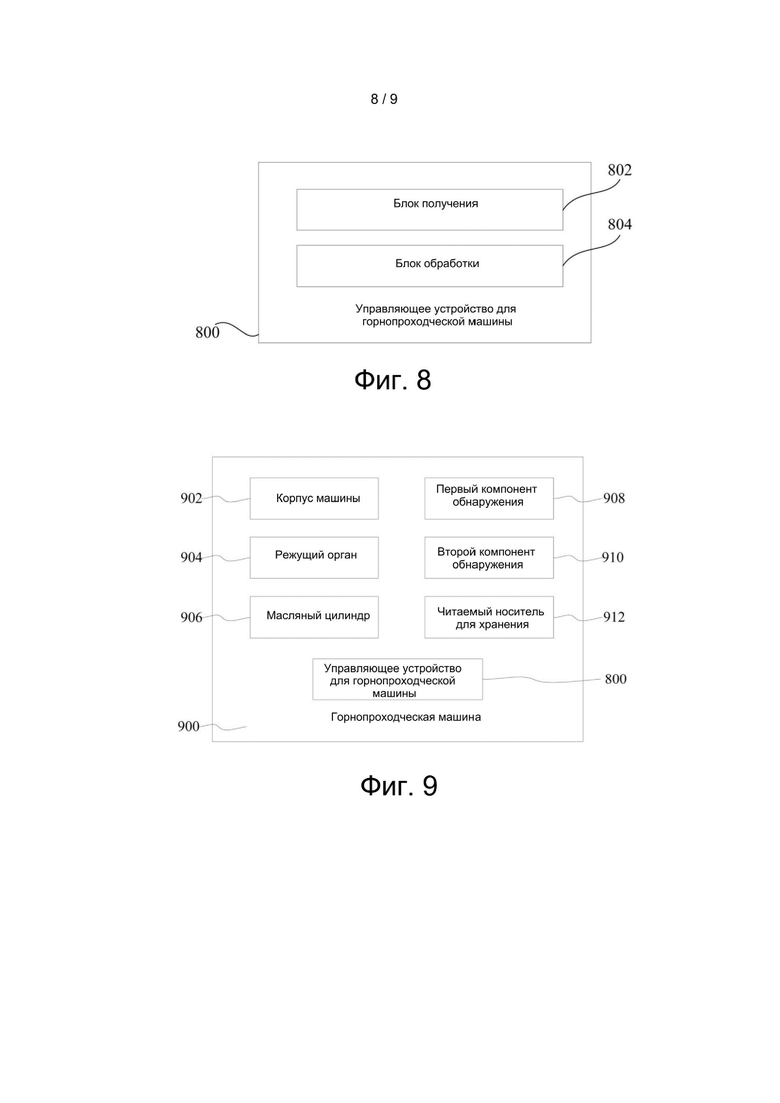
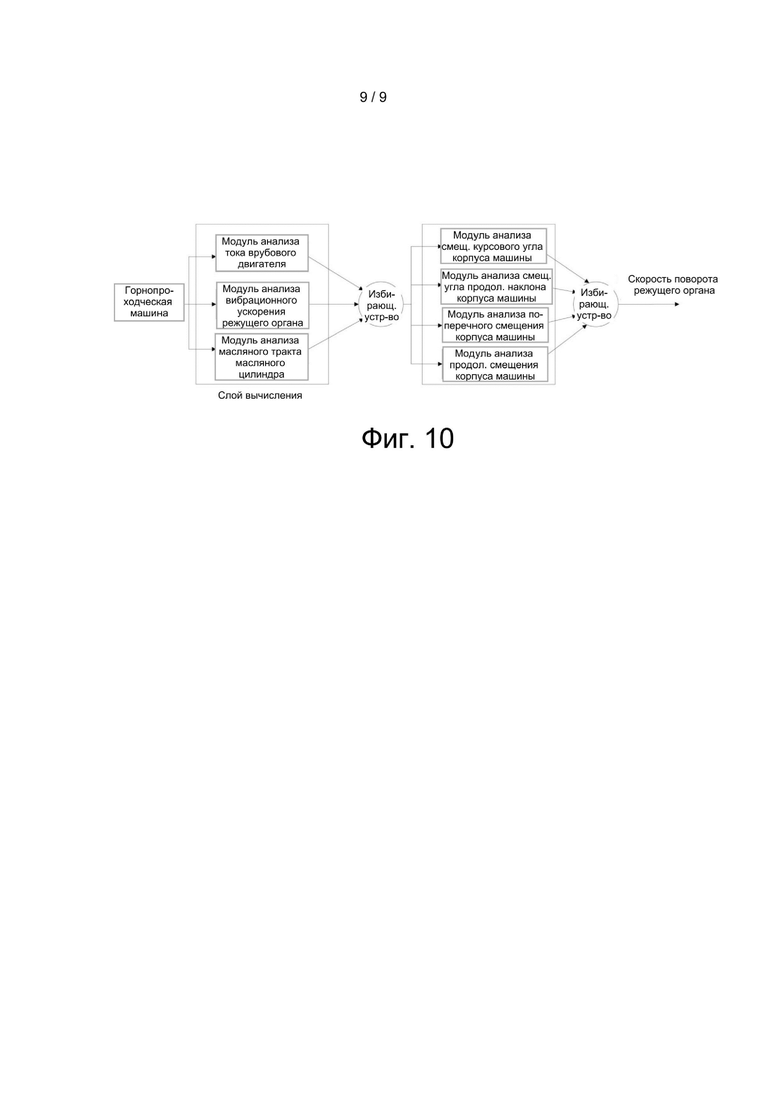
Группа изобретений относится к горной промышленности, а именно к способу управления, устройству для горнопроходческой машины, читаемому носителю для хранения и горнопроходческой машине. Способ управления включает в себя: получение первого набора данных, обнаруженных первым компонентом обнаружения, при этом первый набор данных используется для указания рабочих параметров режущего органа; определение прогнозируемого значения скорости поворота согласно первому набору данных; получение второго набора данных, обнаруженных вторым компонентом обнаружения, при этом второй набор данных используется для указания параметров положения корпуса машины; и определение целевого значения скорости поворота согласно прогнозируемому значению скорости поворота и второму набору данных и управление режущим органом для его поворота согласно целевому значению скорости поворота. Технический результат заключается в повышении безопасности труда и надежности горнопроходческой машины за счет улучшения оценки и точности управления скоростью поворота режущего органа горнопроходческой машины. 4 н. и 5 з.п. ф-лы, 10 ил.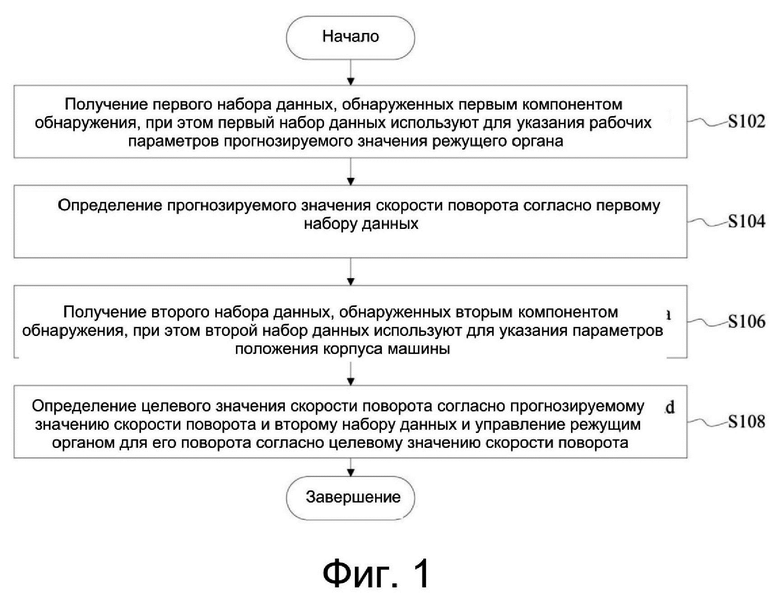
1. Способ управления горнопроходческой машиной, содержащей корпус машины, режущий орган, расположенный на корпусе машины, и масляный цилиндр, выполненный с возможностью приведения в действие режущего органа для поворота, при этом способ управления включает:
получение первого набора данных, обнаруженных первым компонентом обнаружения, при этом первый набор данных используют для указания рабочих параметров режущего органа;
определение прогнозируемого значения скорости поворота согласно первому набору данных;
получение второго набора данных, обнаруженных вторым компонентом обнаружения, при этом второй набор данных используют для указания параметров положения корпуса машины; и
определение целевого значения скорости поворота согласно прогнозируемому значению скорости поворота и второму набору данных и управление режущим органом для его поворота согласно целевому значению скорости поворота,
при этом первый набор данных содержит ток двигателя для режущего органа, вибрационное ускорение режущего органа и давление в масляном тракте масляного цилиндра; и
второй набор данных содержит смещение курсового угла корпуса машины, смещение угла продольного наклона корпуса машины, поперечное смещение корпуса машины и продольное смещение корпуса машины,
при этом этап определения прогнозируемого значения скорости поворота согласно первому набору данных, в частности, включает:
получение первого заданного коэффициента соотношения между сопротивлением нагрузки при резании и скоростью поворота режущего органа;
определение первого сопротивления нагрузки при резании согласно току двигателя для режущего органа и определение первого прогнозируемого значения скорости поворота согласно первому сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения;
определение второго сопротивления нагрузки при резании согласно вибрационному ускорению режущего органа и определение второго прогнозируемого значения скорости поворота согласно второму сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения;
определение третьего сопротивления нагрузки при резании согласно давлению в масляном тракте масляного цилиндра и определение третьего прогнозируемого значения скорости поворота согласно третьему сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения; и
определение прогнозируемого значения скорости поворота согласно первому прогнозируемому значению скорости поворота, второму прогнозируемому значению скорости поворота и третьему прогнозируемому значению скорости поворота.
2. Способ управления горнопроходческой машиной по п. 1, согласно которому режущий орган содержит режущую головку, а этап определения первого сопротивления нагрузки при резании согласно току двигателя для режущего органа, в частности, включает:
получение диаметра режущей головки, значения скорости вращения двигателя для режущего органа и входного напряжения двигателя для режущего органа; и
определение первого сопротивления нагрузки при резании согласно диаметру режущей головки, скорости вращения двигателя для режущего органа, входному напряжению двигателя для режущего органа и току двигателя для режущего органа.
3. Способ управления горнопроходческой машиной по п. 1, согласно которому этап определения второго сопротивления нагрузки при резании согласно вибрационному ускорению режущего органа, в частности, включает:
получение второго заданного коэффициента соотношения между вибрационным ускорением режущего органа и сопротивлением нагрузки при резании; и
определение второго сопротивления нагрузки при резании согласно второму заданному коэффициенту соотношения и вибрационному ускорению режущего органа.
4. Способ управления горнопроходческой машиной по п. 1, согласно которому этап определения третьего сопротивления нагрузки при резании согласно давлению в масляном тракте масляного цилиндра, в частности, включает:
определение смещения поршня в масляном цилиндре согласно давлению в масляном тракте масляного цилиндра;
получение эффективной площади камеры масляного цилиндра, падения давления на нагрузке, полной массы нагрузки и поршня в масляном цилиндре, коэффициентов вязкостного демпфирования нагрузки и поршня в масляном цилиндре и жесткости нагрузочной пружины; и
определение третьего сопротивления нагрузки при резании согласно эффективной площади камеры масляного цилиндра, падению давления на нагрузке, полной массе нагрузки и поршня в масляном цилиндре, коэффициентам вязкостного демпфирования нагрузки и поршня в масляном цилиндре, жесткости нагрузочной пружины и смещению поршня в масляном цилиндре.
5. Способ управления горнопроходческой машиной по п. 1, согласно которому этап определения прогнозируемого значения скорости поворота согласно первому прогнозируемому значению скорости поворота, второму прогнозируемому значению скорости поворота и третьему прогнозируемому значению скорости поворота, в частности, включает:
определение одного и того же прогнозируемого значения в качестве прогнозируемого значения скорости поворота в случае, когда части или все из первого прогнозируемого значения скорости поворота, второго прогнозируемого значения скорости поворота и третьего прогнозируемого значения скорости поворота являются одними и теми же; или
определение прогнозируемого значения с самым высоким приоритетом в качестве прогнозируемого значения скорости поворота в случае, когда первое прогнозируемое значение скорости поворота, второе прогнозируемое значение скорости поворота и третье прогнозируемое значение скорости поворота являются различными.
6. Способ управления горнопроходческой машиной по п. 1, согласно которому этап определения целевого значения скорости поворота согласно прогнозируемому значению скорости поворота и второму набору данных, в частности, включает:
определение прогнозируемого значения смещения курсового угла корпуса машины, прогнозируемого значения смещения угла продольного наклона корпуса машины, прогнозируемого значения поперечного смещения корпуса машины и прогнозируемого значения продольного смещения корпуса машины согласно прогнозируемому значению скорости поворота;
подтверждение того, согласованы ли прогнозируемое значение смещения курсового угла корпуса машины, прогнозируемое значение смещения угла продольного наклона корпуса машины, прогнозируемое значение поперечного смещения корпуса машины и прогнозируемое значение продольного смещения корпуса машины со значением смещения курсового угла корпуса машины, значением смещения угла продольного наклона корпуса машины, значением поперечного смещения корпуса машины и значением продольного смещения корпуса машины во втором наборе данных; и
определение прогнозируемого значения скорости поворота в качестве целевого значения скорости поворота в случае, когда любое из прогнозируемых значений согласовано с параметрами во втором наборе данных.
7. Управляющее устройство для горнопроходческой машины, содержащей корпус машины, режущий орган, расположенный на корпусе машины, и масляный цилиндр, выполненный с возможностью приведения в действие режущего органа для поворота, при этом управляющее устройство содержит:
блок получения, выполненный с возможностью получения первого набора данных, обнаруженных первым компонентом обнаружения, при этом первый набор данных используется для указания рабочих параметров режущего органа;
блок обработки, выполненный с возможностью определения прогнозируемого значения скорости поворота согласно первому набору данных;
при этом блок получения дополнительно выполнен с возможностью получения второго набора данных, обнаруженных вторым компонентом обнаружения, при этом второй набор данных используется для указания параметров положения корпуса машины; и
при этом блок обработки дополнительно выполнен с возможностью определения целевого значения скорости поворота согласно прогнозируемому значению скорости поворота и второму набору данных и управления режущим органом для его поворота согласно целевому значению скорости поворота,
при этом первый набор данных содержит ток двигателя для режущего органа, вибрационное ускорение режущего органа и давление в масляном тракте масляного цилиндра; и
второй набор данных содержит смещение курсового угла корпуса машины, смещение угла продольного наклона корпуса машины, поперечное смещение корпуса машины и продольное смещение корпуса машины,
при этом блок обработки данных выполнен с возможностью получения первого заданного коэффициента соотношения между сопротивлением нагрузки при резании и скоростью поворота режущего органа;
определения первого сопротивления нагрузки при резании согласно току двигателя для режущего органа и определения первого прогнозируемого значения скорости поворота согласно первому сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения;
определения второго сопротивления нагрузки при резании согласно вибрационному ускорению режущего органа и определения второго прогнозируемого значения скорости поворота согласно второму сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения;
определения третьего сопротивления нагрузки при резании согласно давлению в масляном тракте масляного цилиндра и определения третьего прогнозируемого значения скорости поворота согласно третьему сопротивлению нагрузки при резании и первому заданному коэффициенту соотношения; и
определения прогнозируемого значения скорости поворота согласно первому прогнозируемому значению скорости поворота, второму прогнозируемому значению скорости поворота и третьему прогнозируемому значению скорости поворота.
8. Читаемый носитель для хранения, в котором хранится программа или инструкция, которая при ее исполнении процессором осуществляет этапы способа управления горнопроходческой машиной по любому из пп. 1-6.
9. Горнопроходческая машина, содержащая:
корпус машины;
режущий орган, расположенный на корпусе машины;
масляный цилиндр, соединенный с режущим органом и выполненный с возможностью приведения в действие режущего органа для его поворота;
первый компонент обнаружения, выполненный с возможностью обнаружения первого набора данных, используемого для указания рабочих параметров режущего органа;
второй компонент обнаружения, выполненный с возможностью обнаружения второго набора данных, используемого для указания параметров положения корпуса машины;
управляющее устройство для горнопроходческой машины по п. 7 и/или
читаемый носитель для хранения по п. 8.
| CN 201013380 Y, 30.01.2008 | |||
| CN 101169038 B, 08.09.2010 | |||
| УСТРОЙСТВО И СПОСОБ ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ МАТЕРИАЛОВ ФРЕЗЕРОВАНИЕМ И БУРЕНИЕМ | 2012 |
|
RU2610474C2 |
| Способ управления горной машиной | 1990 |
|
SU1781426A1 |
| Устройство для автоматической защиты электродвигателя исполнительного органа горной машины от перегрузок | 1979 |
|
SU898057A1 |
| АВТОМАТИЗИРОВАННЫЕ ОПЕРАЦИИ ГОРНОЙ МАШИНЫ | 2012 |
|
RU2617498C2 |
| СПОСОБ УПРАВЛЕНИЯ ГОРНЫМ КОМБАЙНОМ С ПЛАНЕТАРНО-ДИСКОВЫМ ИСПОЛНИТЕЛЬНЫМ ОРГАНОМ | 2016 |
|
RU2618630C1 |
| CN 102418522 A, 18.04.2012 | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Островский и др | |||
| Технология вибромониторинга технического состояния горных | |||
