Изобретение относится к испытательной технике и может быть использовано при исследованиях управляемости и устойчивости движения машинно-тракторных агрегатов.
Известны способ координирования машинно-тракторных агрегатов на поле с помощью фазового метода радиопеленгации и устройство для его осуществления [1] . В данном случае изменение координат МТА определяют, измеряя разности сигналов, генерируемых в разностно-фазовом пеленгаторе.
Недостатком такого способа является высокая стоимость и сложность оборудования, а также необходимость в высокой квалификации обслуживающего персонала.
Наиболее близким к предлагаемому способу является способ определения траектории МТА [2], при котором в каждый момент времени фиксируются курсовой угол и действительная скорость движения агрегата, с использованием которых рассчитывают линейные отклонения МТА.
Недостатком данного способа является отсутствие возможности определения бокового смещения МТА. Боковое смещение происходит чаще всего в результате деформации шин и смещения рабочих органов навесных орудий. Следовательно, при моделировании МТА, в данном случае, зги факторы будут отсутствовать. Это значительно снижает достоверность и точность экспериментальных исследований машино-тракторных агрегатов.
Технический результат данной работы - повышение точности и достоверности экспериментальных исследований машинно-тракторных агрегатов.
На чертеже изображена схема устройства для определения положения МТА относительно вспомогательного транспортного средства.
Предлагаемый способ определения положения МТА 1 на поле сводится к определению в любой момент времени координат его характерных точек (например, середин осей колес трактора) относительно вспомогательного транспортного средства (ВТС) 2, движущегося (с зафиксированным нейтральным положением направляющих колес) без внешних нагрузок по некоторой опорной линии 3, соответствующей записываемым на шлейфовый осциллограф показаниям гироскопа 4 и путевого колеса 5.
Отклонение трактора от ВТС фиксируется специальным устройством. Устройство состоит из подпружиненных катушек 6, 7 и 8, установленных на МТА в точках A и B и имеющих возможность поворота относительно вертикальных осей. На катушки 6, 7 и 8 намотаны нерастяжимые нити 9, 10 и 11, свободными концами жестко крепящиеся на ВТС 2 в точках C и D. Катушки 6, 7 и 8 расположены таким образом, что нити 9 и 10 катушек 6 и 7 соответствуют сторонам воображаемого четырехугольника ABCD, а нить 11 катушки 8 - диагонали указанного четырехугольника.
ПРИМЕР. В процессе экспериментальных исследований МТА 1 перемещается по некоторой траектории 12. Катушка 7 отдаляется от ВТС 2 и, следовательно, нерастяжимая нить 10 разматывается. Разматываясь, нить 10 поворачивает катушку 7 относительно ее вертикальной оси. Поворот катушки фиксируется датчиком оборотов (не показан), сигнал которого записывается на шлейфовый осциллограф. Пружина 14 при этом растягивается. Катушка 6 приближается к ВТС 2, следовательно, пружина 13 сжимается, вызывая вращение катушки 6 и наматывание на нее нити 9. Вращение катушки 6 также фиксируется датчиком оборотов и записывается на осциллограф. Аналогично работает катушка 8. По записям сигналов от датчиков оборотов определяются текущие изменения длин нитей 9, 10 и 11, что позволяет определить в каждый момент времени положение МТА 1 относительно ВТС 2.
Таким образом, можно определить в любой момент времени положение ВТС 2 на опорной линии, положение МТА 1 относительно ВТС 2, а следовательно, и положение МТА 1 (его координаты) на обрабатываемом поле.
Экономический эффект обеспечивается за счет повышения точности и достоверности экспериментальных исследований.
Источники информации
1. А.с. 1723485 СССР, МКИ G 01 М 17/00. Способ определения динамических характеристик движения машинно-тракторного агрегата и устройство для его осуществления / В.А.Кортунов, Ф.В.Кивва, А.В.Дудин, И.П.Сазонов, А.В.Рославцев, В. М.Авдеев (СССР). - N 4848583/11; Заявл. 03.07.90; Опубл. 30.03.92, Бюл. N 12. С. 185-186.
2. Средства исследования движения МТА/ А.В.Рославцев и др. //Тракторы и сельскохозяйственные машины. - 1999. - N 3 - С. 26-29.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ КРИВОЛИНЕЙНОГО ДВИЖЕНИЯ ТРАКТОРА | 2015 |
|
RU2600002C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕНИ РАБОТЫ МАШИННО-ТРАКТОРНОГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2603815C1 |
| ТРАКТОР ТОЧНОГО ХОДА И СПОСОБ АВТОПИЛОТИРОВАНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА ПО МЕСТНЫМ ОРИЕНТИРАМ | 2013 |
|
RU2550915C1 |
| Гидроцепное догружающе-регулирующее устройство сельскохозяйственного агрегата | 2018 |
|
RU2729095C2 |
| Способ автоматического управления навесным устройством на машинно-тракторном агрегате | 2024 |
|
RU2839475C1 |
| Буксирно-сцепное устройство с вертикальным регулированием | 2022 |
|
RU2780711C1 |
| Корректор-распределитель вертикальной нагрузки тракторно-транспортного агрегата | 2024 |
|
RU2838714C1 |
| Угломерная радионавигационная система автовождения машинно-тракторного агрегата | 1988 |
|
SU1630625A1 |
| СПОСОБ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ МАШИННО-ТРАКТОРНОГО АГРЕГАТА | 2013 |
|
RU2560210C2 |
| Корректор-догружатель задних ведущих колёс трактора при работе с прицепными сельскохозяйственными агрегатами | 2024 |
|
RU2833701C1 |
Изобретение может быть использовано при исследованиях управляемости и устойчивости движения машинно-тракторных агрегатов (МТА). Технический результат - повышение точности и достоверности экспериментальных исследований. Определяют в любой момент времени координаты характерных точек МТА относительно вспомогательного транспортного средства (ВТС), движущегося без внешних нагрузок по некоторой опорной линии, соответствующей записываемым на шлейфовый осциллограф показаниям гироскопа и путевого колеса. Отклонение трактора от ВТС фиксируется устройством. Устройство состоит из подпружиненных катушек, установленных на МТА и имеющих возможность поворота относительно вертикальных осей. На катушки намотаны нерастяжимые нити, свободными концами жестко крепящиеся на ВТС. Катушки располагаются так, что нити катушек соответствуют сторонам и диагонали воображаемого четырехугольника. 2 с. и 1 з.п. ф-лы, 1 ил.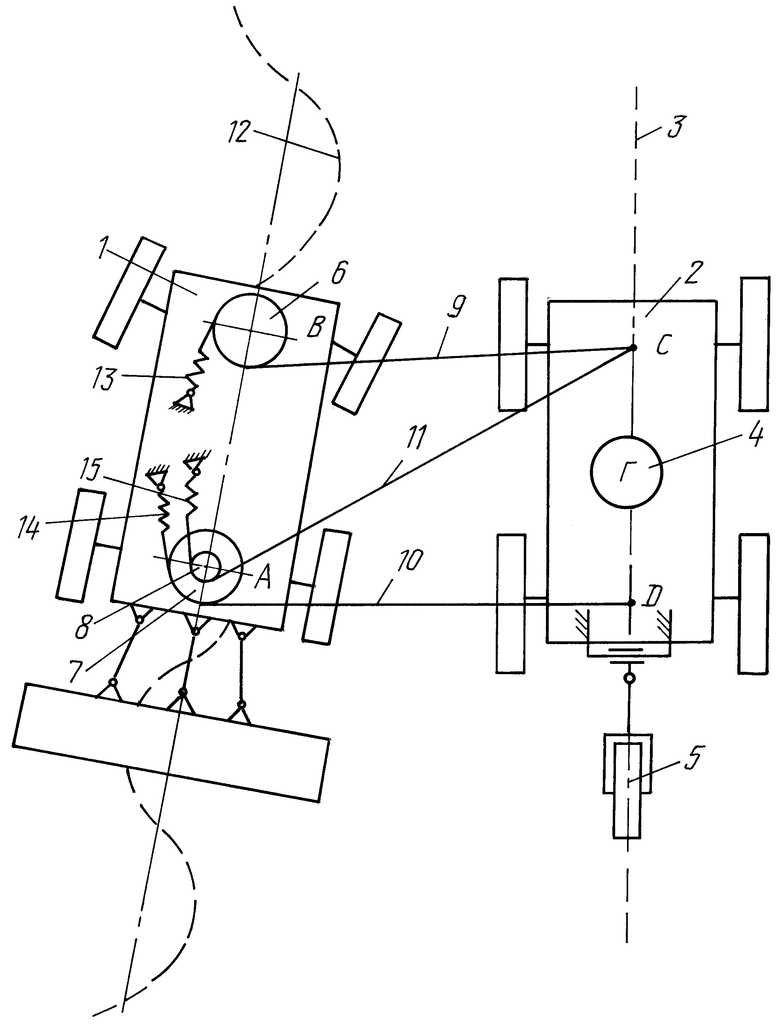
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КИНЕМАТИЧЕСКИХ ХАРАКТЕРИСТИК ГУСЕНИЧНОЙ МАШИНЫ | 1991 |
|
RU2018103C1 |
| Способ дубления жестких кож | 1958 |
|
SU118231A2 |
| Устройство для исследования управляемости транспортного средства | 1979 |
|
SU887975A1 |
| Устройство для исследования кинематики гусеничной машины | 1983 |
|
SU1129511A2 |
