Область техники, к которой относится изобретение
Изобретение относится к области активного управления силовой обратной связью устройств управления, таких как миништурвал для управления воздушным судном, в частности, вертолетом. Более конкретно изобретение касается миништурвала с силовой обратной связью, позволяющей пилоту ощущать усилие при манипуляциях миништурвалом.
Уровень техники
Известны пассивные миништурвалы, в которых для воспроизведения усилия используются механические элементы (на базе пружин, гидравлических тормозов и т.п.). Следовательно, размеры и характеристики их механических частей должны быть подобраны в соответствии с требуемой величиной силовой обратной связи. Таким образом, системы пассивного типа по определению имеют нерегулируемую конструкцию. Кроме того, их точность может снижаться вследствие износа механических частей.
Также известны активные миништурвалы, оборудованные системой управления возвратным усилием, контролируемой управляющей электроникой. Преимущество таких активных конструкций состоит в применении электромеханических элементов, а также в обеспечении возможности изменения программного обеспечения, задающего параметры силовой обратной связи для формирования обратной связи переменной величины.
В патентном документе FR 2708112 A1 описано активное решение, в котором положение штурвала зависит от прилагаемого к нему усилия. В рамках данного решения, как только пилот отпускает штурвал, датчик усилия регистрирует нулевое значение, что приводит к повышению заданного тока, подаваемого в двигатель, и, следовательно, к значительному ускорению двигателя. В результате двигатель развивает максимальный для данной скорости крутящий момент, чтобы обеспечить возвращение в заданное состояние (как правило, исходное нейтральное положение). Таким образом, возникает опасность сбоя возвращения штурвала в исходное положение, при котором штурвал проходит через такое положение, в результате чего возникают его колебания вокруг исходного положения, что может привести к нарушению безопасности системы.
Раскрытие изобретения
Задача, на решение которой направлено настоящее изобретение, состоит в предложении надежной, воспроизводимой, точной и гибкой системы управления миништурвалом, способной к воспроизведению сложных и изменяемых зависимостей усилия без негативного влияния на общую конструкцию (также изменяемую), обладающей небольшими размерами и невысокой стоимостью.
Для решения поставленной задачи в соответствии с изобретением предлагается устройство активного управления силовой обратной связью для устройства управления, содержащее вычислитель, датчик положения, выполненный с возможностью подачи на вычислитель сигнала текущего положения устройства управления, и привод, обеспечивающий перемещение устройства управления под управлением вычислителя, причем вычислитель выполнен с возможностью использования сигнала текущего положения и модулирования тока уставки, подаваемого в привод, для обеспечения регулируемого изменения положения устройства управления,
отличающееся тем, что вычислитель дополнительно выполнен с возможностью формирования по меньшей мере одного предела насыщения в соответствии с заранее определенной функцией значения сигнала текущего положения, определяющей зависимость усилия от положения, и насыщения тока уставки при помощи указанного по меньшей мере одного предела насыщения.
Устройство по изобретению обладает следующими предпочтительными, но не накладывающими каких-либо ограничений аспектами:
- вычислитель обеспечивает каскадное регулирование положения привода, причем каскадное регулирование положения реализовано при помощи основного регулирующего контура положения и вторичного внутреннего регулирующего контура скорости;
- вычислитель дополнительно содержит модуль оценки скорости, использующий сигнал текущего положения для формирования сигнала текущей скорости, причем вычислитель дополнительно формирует по меньшей мере один предел насыщения в соответствии с заранее определенной функцией значения сигнала текущей скорости, определяющей зависимость усилия от скорости;
- устройство дополнительно содержит датчик усилия, выполненный с возможностью формирования сигнала текущего усилия, прилагаемого пользователем к устройству управления, причем вычислитель дополнительно выполнен с возможностью вычисления расхождения усилия, соответствующего разности между сигналом текущего усилия и по меньшей мере одним пределом насыщения, и корректировки тока уставки как функции сигнала расхождения усилия;
- корректировка тока уставки состоит во вводе расхождения усилия в насыщенный ток уставки;
- корректировка тока уставки состоит во вводе расхождения усилия в по меньшей мере один предел насыщения тока уставки;
- вычислитель выполнен с возможностью регулирования уровня влияния корректировки тока уставки как фунции расхождения усилия.
В соответствии с другим аспектом изобретения предлагается воздушное судно, содержащее орган управления воздушного судна, устройство управления для приведения органа управления воздушного судна, и устройство активного управления силовой обратной связью для устройства управления согласно настоящему изобретению.
В соответствии с дальнейшим аспектом изобретения предлагается способ активного управления силовой обратной связью для устройства управления, перемещение которого обеспечивает привод под управлением вычислителя, в котором измеряют текущее положение устройства управления и осуществляют модулирование тока уставки, поступающего в привод, для обеспечения регулирования изменения положения устройства управления, отличающийся тем, что формируют по меньшей мере один предел насыщения в соответствии с заранее определенной функцией значения измеренного текущего положения, определяющей зависимость усилия от положения, и осуществляют насыщение тока уставки по верхнему и нижнему пределам при помощи указанного по меньшей мере одного предела насыщения.
Краткое описание чертежей
Другие аспекты, задачи и преимущества настоящего изобретения станут более ясны из нижеследующего описания не накладывающих каких-либо ограничений примеров предпочтительных вариантов его осуществления, приведенного со ссылками на прилагаемые чертежи, где:
- на фиг. 1 представлен первый вариант осуществления устройства управления по изобретению;
- фиг. 2 иллюстрирует один из возможных вариантов осуществления формирования двух пределов насыщения;
- фиг. 3 иллюстрирует один из возможных вариантов осуществления корректирования насыщенного тока уставки в рамках первого варианта осуществления изобретения;
- на фиг. 4 представлен второй вариант осуществления устройства управления по изобретению;
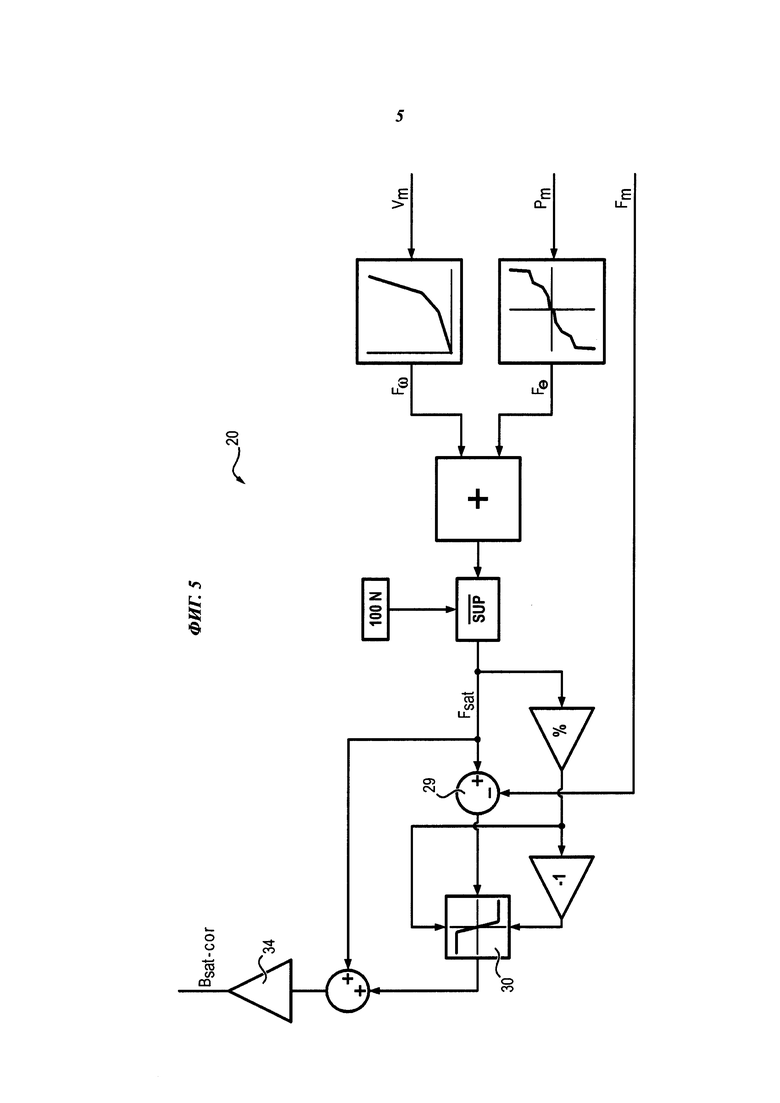
- фиг. 5 иллюстрирует один из возможных вариантов осуществления формирования предела насыщения в рамках второго варианта осуществления изобретения.
Осуществление изобретения
В соответствии с настоящим изобретением предлагается устройство активного управления силовой обратной связью для устройства управления транспортного средства, в частности, транспортного средства, содержащего аэродинамический или гидродинамический орган управления. В соответствии с настоящим изобретением также предлагается способ активного управления силовой обратной связью для такого устройства управления.
Решение по изобретению предпочтительно может быть использовано для активного управления силовой обратной связью миништурвала (также джойстика или «стика» (stick)) управления воздушным судном, в частности, вертолетом. В нижеследующем описании используется пример такого вертолетного миништурвала. Однако изобретение не ограничено данным примером осуществления, и термин «управление» использован в нижеследующем описании в широком смысле и обозначает управление транспортным средством, осуществляемое человеком при помощи устройства управления, например, рукоятки, рычага, рулевого колеса, педали и т.д.
В соответствии с известными технологиями устройство управления транспортного средства содержит устройство управления, связанное с направляющим элементом (в частности, органом управления), и механический привод, связанный с устройством управления для имитации специфического динамического поведения устройства управления с целью обеспечения возврата в нейтральное положение и создания искусственного ощущения противодействующего усилия при воздействии пилота на устройство управления. Таким образом, устройство по изобретению содержит вычислитель и привод, обеспечивающий перемещение устройства управления под управлением вычислителя.
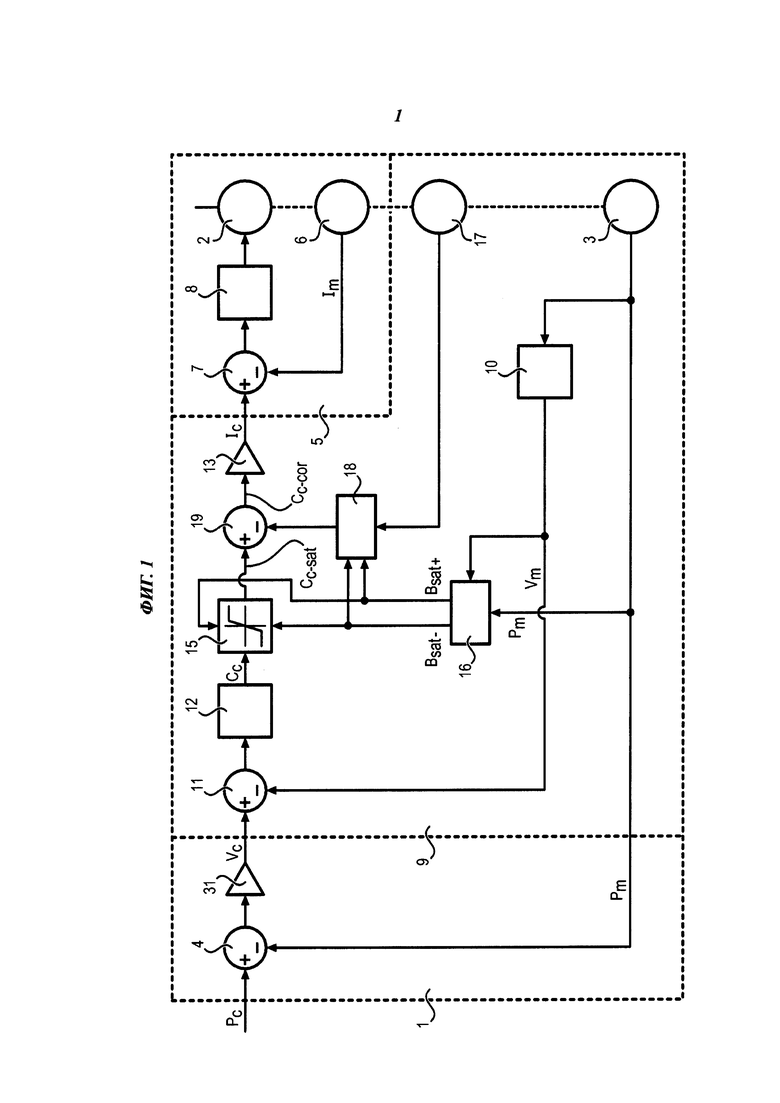
На фиг. 1 и 2, иллюстрирующих два возможных варианта осуществления устройства по изобретению, где аналогичные элементы обозначены одинаковыми ссылочными номерами, представлен пример, в котором привод представляет собой двигатель 1 бесщеточного («brushless») типа, соединенный с миништурвалом через редуктор. Вычислитель выдает команду управления двигателем, которое в основном осуществляют три взаимосвязанных регулирующих контура: основной контур 1 положения двигателя, внутренний контур 9 скорости двигателя и контур 5 тока, непосредственно отражающий крутящий момент двигателя. Таким образом, вычислитель осуществляет регулирование положения при помощи каскадной схемы, в которую входят основной регулирующий контур 1 положения и вторичный внутренний регулирующий контур 9 скорости, модулируя ток уставки, поступающий в контур тока двигателя. Однако следует отметить, что в управлении двигателем, осуществляемом вычислителем, внутренний контур скорости может не быть использован.
Регулирование положения двигателя осуществляют таким образом, чтобы всегда обеспечивать возвращение миништурвала в заданное положение Рс, которое может соответствовать, например, вертикальному положению. При попытке пилота отвести миништурвал от этого положения двигатель прилагает крутящий момент, направленный на возвращение в исходное положение, в результате чего пилот ощущает усилие, возникающее на миништурвале.
Контур 1 положения содержит датчик 3 положения (датчик положения миништурвала или датчик положения двигателя, как в описываемом варианте осуществления, обладающий более высоким разрешением), который подает на вычислитель сигнал Pm текущего положения устройства управления. Контур 1 положения содержит вычитающий модуль 4, который определяет разность между заданным положением Рс и сигналом Pm текущего положения, и регулятор 31 положения, который определяет заданную скорость Vc, используемую контуром 9 скорости.
Контур 5 тока содержит датчик 6 тока (на практике - по одному датчику на фазу), который измеряет действующий ток Im, текущий в двигателе, вычитающий модуль 7, который определяет разность между током Ic уставки и действующим током Im, и регулятор 8 тока. Регулятор 8 тока может в частности быть выполнен с возможностью подачи векторной команды управления бесщеточным двигателем, в соответствии с которой прилагают такое статорное магнитное поле, всегда перпендикулярное роторному магнитному полю, которое обеспечивает развитие двигателем максимального крутящего момента при данной скорости. Для этого определяют систему координат, общую для ротора и статора, и формируют команды управления двигателем, определенные в этой общей системе координат.
Контур 9 скорости содержит модуль 10 оценки скорости, который обычно представляет собой дифференциатор 10, использующий сигнал Pm текущего положения, подаваемый датчиком 3 положения, для формирования сигнала Vm текущей скорости. В других вариантах осуществления контур скорости может содержать датчик скорости.
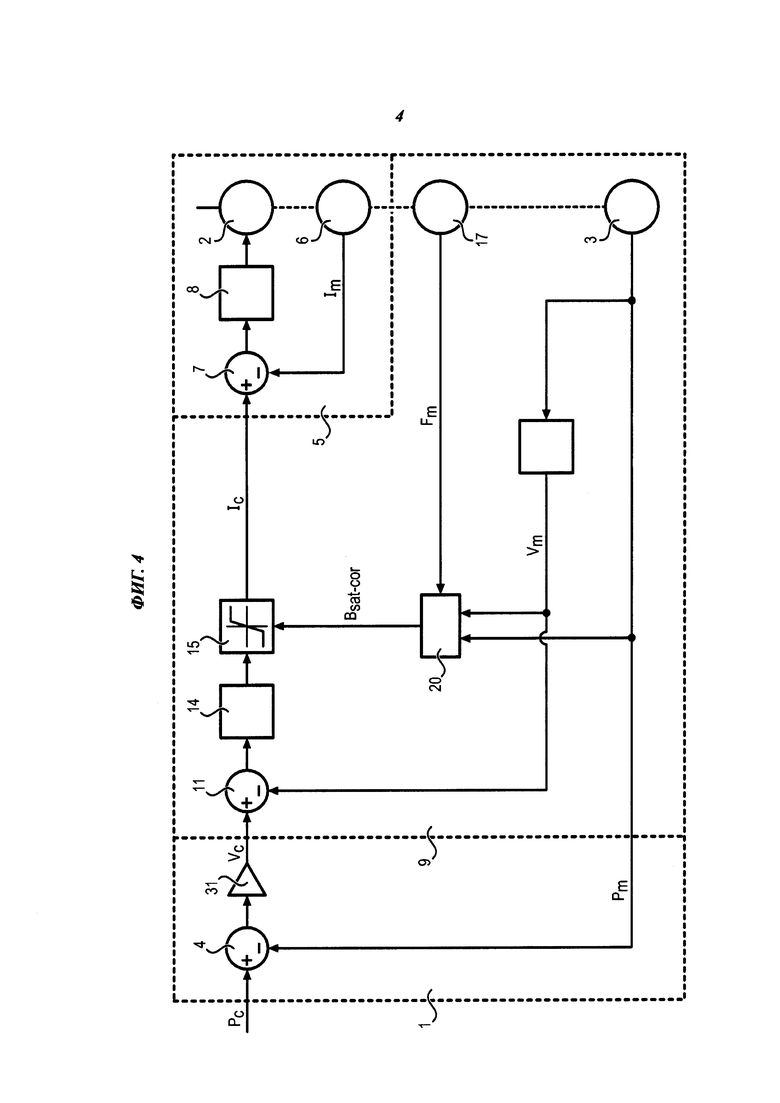
Контур 9 скорости содержит вычитающий модуль, который определяет разность между заданной скоростью Vc и сигналом Vm текущей скорости, и регулятор 12 скорости, который вырабатывает заданный крутящий момент Сс (фиг. 1), или регулятор 14 скорости, который непосредственно вырабатывает ток уставки (фиг. 2).
В соответствии с изобретением регулирование положения производят на основе информации о положении и, возможно, скорости. Данное решение обладает тем преимуществом, что управление двигателем и, следовательно, положением штурвала не зависит от приложенного усилия, что позволяет устранить затруднения, связанные с отпусканием штурвала, при котором датчик усилия вызывает значительное ускорение двигателя.
В соответствии с известными технологиями регулирования положения/скорости/тока контур тока использует ток уставки (непосредственно отображающий заданный крутящий момент Сс через единственный умножающий модуль 5, как показано на фиг. 1), поступающий с выхода регулятора скорости. В соответствии с изобретением предлагается обеспечить насыщение тока уставки, поступающего с выхода регулятора скорости и обеспечивающего векторное управление двигателем 2. Насыщение осуществляют на выходе регулятора 12, 14 скорости при помощи ограничителя 15, в который из модуля 16, 20 насыщения поступает по меньшей мере один предел Bsat+, Bsat-, Bsat-cor насыщения. В конфигурации по фиг. 1 ограничитель 15 получает заданный крутящий момент Сс и выдает насыщенный заданный крутящий момент Cc-sat, ограниченный сверху и снизу пределами Bsat+ и Bsat- насыщения. Затем насыщенный крутящий момент Cc-sat преобразуют в насыщенный ток Ic уставки. В конфигурации по фиг. 4 ограничитель получает от ограничителя 14 ток уставки и выдает насыщенный ток уставки, ограниченный сверху и снизу пределом Bsat-cor насыщения.
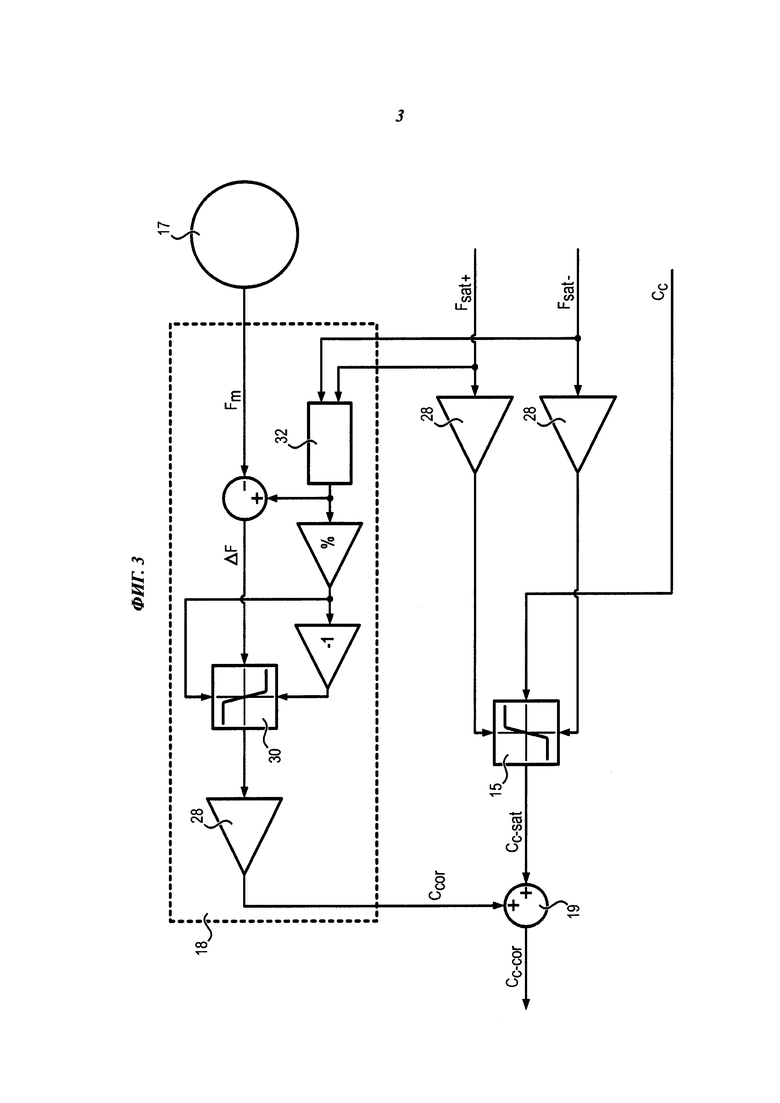
Как видно из фиг. 3, насыщение тока уставки осуществляют при помощи по меньшей мере одного предела насыщения, поступающего из одной или более параметризируемых таблиц 21-23 зависимости усилия. При этом стремятся к получению от двигателя крутящего момента, предусмотренного в таблицах усилия, а не максимального крутящего момента, определенного векторной командой управления. Точнее, по меньшей мере один предел насыщения вычисляют в соответствии с заранее определенной функцией значения сигнала текущего положения в виде зависимости положения от усилия; ее получают из таблицы отклонений, которая по входному значению углового положения выдает на выходе значение усилия. Таким образом, при перемещении пилотом миништурвала двигатель вырабатывает максимальный крутящий момент при данной скорости для возврата в исходное положение, причем этот крутящий момент насыщают крутящим моментом, определенным по таблице отклонений, так, чтобы пилот ощущал на штурвале требуемое усилие.
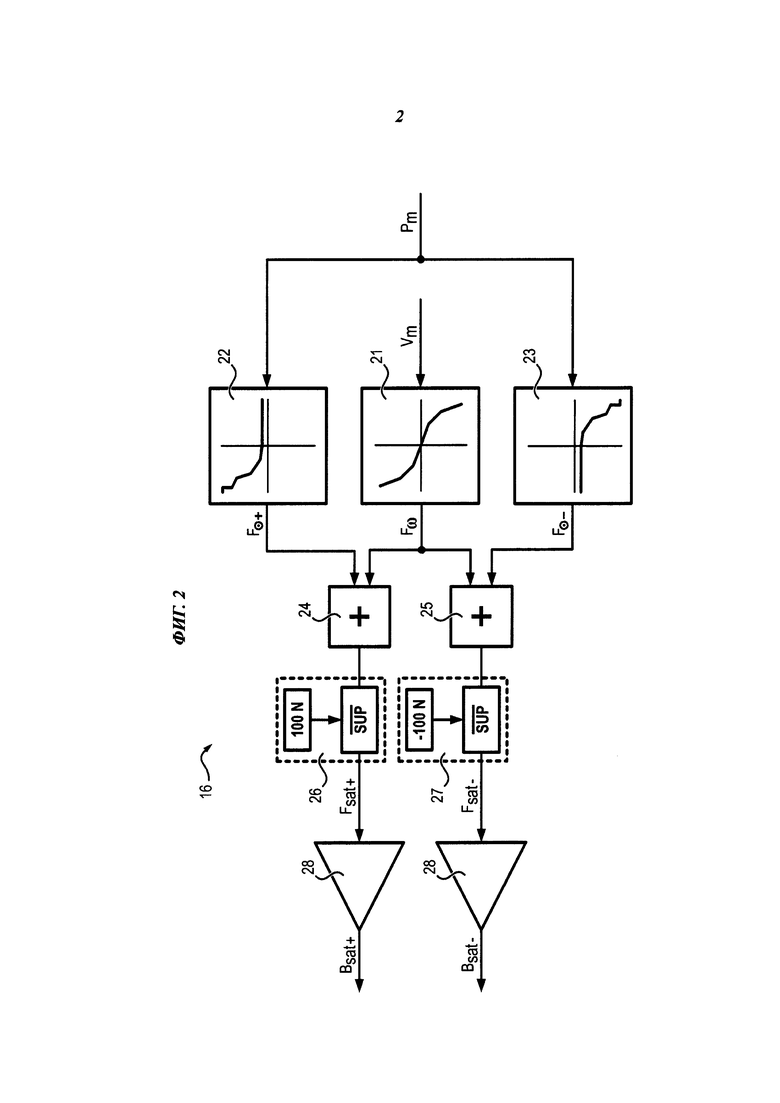
В одном из возможных вариантов осуществления, представленном на фиг. 3, формируют два предела Bsat+, Bsat- насыщения для ограничения верхнего и нижнего пределов тока уставки, которые могут не быть симметричными. Для этого используют две таблицы 22, 23 отклонений. Первую таблицу 22 отклонений используют для формирования верхнего предела Bsat+ насыщения: из нее получают положительное усилие Fθ+ при отрицательном положении миништурвала. В оптимальном варианте осуществления данная таблица выдает при положительном положении миништурвала начальное усилие («breakout»), имеющеее ненулевое положительное значение и соответствующее усилию, которое пилот должен приложить для перемещения миништурвала из исходного положения в положительном направлении. Вторую таблицу 23 отклонений используют для формирования нижнего предела Bsat-насыщения: из нее получают отрицательное усилие Fθ- при положительном положении миништурвала. Она также предусматривает возможность выдачи начального усилия («breakout») для перемещения миништурвала из исходного положения в отрицательном направлении.
Зависимости, содержащиеся в таблицах 22, 23 отклонений, могут не быть симметричными. Так, они могут учитывать, что пилот может прилагать большее усилие при перемещении миништурвала от себя, чем на себя, так как в первом случае он может толкать его всем весом своего тела. Также может быть учтено, что при работе правой рукой пилот может прилагать большее усилие для перемещения объекта справа налево, чем слева направо.
В соответствии с одним из вариантов осуществления дополнительно используют таблицу амортизации, на вход которой поступает скорость, а на выходе получают усилие Fω. Эта таблица позволяет прилагать к миништурвалу большее усилие в случае его быстрого перемещения пилотом. Эта таблица также позволяет замедлять возвращение миништурвала в исходное положение в случае его отпускания пилотом.
Как показано на фиг. 1 и 2, модуль 16 насыщения использует сигнал текущего положения Pm и сигнал текущей скорости и передает эту информацию в таблицы 21-23 усилий, каждая из которых выдает значение усилия Fω, Fθ+, Fθ-. Сумматоры 24, 25 складывают значение усилия Fω, полученное из таблицы 21 амортизации, с каждым из значений усилий Fθ+, Fθ-, полученных из таблиц 22, 23 отклонений. В результате получают верхнее и нижнее усилия Fsat+, Fsat-насыщения, которые могут быть предварительно ограничены в модулях 26, 27 максимальными допустимыми значениями усилия (в описываемом примере равными 100 Н и -100 Н). Затем эти верхнее и нижнее усилия Fsat+, Fsat-насыщения преобразуют в модулях 28 в верхний и нижний пределы Bsat+, Bsat-насыщения (которые в примерах по фиг. 1 и 2 представляют собой пределы насыщения по крутящему моменту).
Как показано на фиг. 5, может быть предусмотрено вычисление всего одного предела насыщения, который одновременно используют в качестве как верхнего, так и нижнего предела. В таком случае используют всего одну таблицу 32 отклонений, причем усилие, получаемое на ее выходе, может быть сложено с усилием, получаемым на выходе таблицы 21 амортизации, с получением после возможного ограничения максимальным допустимым значением усилия Fsat насыщения. Как показано на фиг. 4 и 5, такое усилие насыщения может быть преобразовано (после возможной корректировки, как описано ниже) непосредственно в предел насыщения по току Bsat-cor.
Из вышеизложенного понятно, что термин «предел насыщения» может обозначать предел насыщения и по крутящему моменту, и по току, и по усилию.
В соответствии с одним из вариантов осуществления устройство по изобретению дополнительно содержит датчик усилия, выполненный с возможностью выдачи сигнала Fm текущего усилия, прилагаемого пользователем к устройству управления. В таком случае вычислитель выполнен с возможностью вычисления сигнала расхождения усилия (ΔF), соответствующего разности между сигналом Fm текущего усилия и пределом насыщения (в данном случае по усилию Fsat+, Fsat-, Fsat), и корректировки тока уставки в соответствии с сигналом расхождения усилия.
В первом варианте осуществления такой конфигурации, представленном на фиг. 1 и 3, сигнал расхождения усилия вводят в насыщенный ток уставки (точнее, в насыщенный заданный крутящий момент Cc-sat после учета расхождения Ccor крутящего момента, как показано на схеме). В данном варианте осуществления ток уставки корректируют на расхождение между величиной, измеренной датчиком усилия, и заданным током после насыщения. В таком случае устройство по изобретению содержит корректирующий модуль 18, в который поступает сигнал Fm текущего усилия от датчика 17 усилия и усилия Fsat+, Fsat-насыщения. Модуль 32 отбора выбирает одно из этих двух усилий в соответствии с положительным или отрицательным текущим положением. Вычитающий модуль 29 вычисляет расхождение усилия ΔF, а преобразователь преобразует его в расхождение Ccor крутящего момента. После этого вычитающий модуль 19 позволяет скорректировать насыщенный заданный крутящий момент Cc-sat на расхождение Ccor крутящего момента, в результате чего получают скорректированный насыщенный заданный крутящий момент Сс-cor.
Во втором варианте осуществления такой конфигурации, представленном на фиг. 4 и 5, сигнал расхождения усилия вводят в по меньшей мере один из пределов насыщения тока уставки. Таким образом, в соответствии с этим вторым вариантом осуществления ограничитель использует по меньшей мере один из пределов насыщения, учитывающий корректировку тока уставки в соответствии с измеренным расхождением между сигналом датчика усилия и заданным значением. В таком случае устройство по изобретению содержит модуль 20 насыщения и корректировки, выдающий такой предел насыщения, скорректированный на расхождение усилия. Кроме того, данный модуль 20 содержит элементы, описанные выше в связи с вычислением усилия Fsat насыщения, вычитающий модуль 29, который вычисляет расхождение усилия ΔF между измеренным текущим усилием Fm и усилием Fsat насыщения, и сумматор 33, который складывает это расхождение усилия с усилием насыщения, в результате чего после прохождения через преобразователь 34 получают предел Bsat-cor насыщения.
В рамках данного варианта осуществления, как показано на фиг. 3 и 5, также может быть отрегулирован уровень влияния корректировки тока уставки в зависимости от сигнала расхождения усилия (ΔF). Такое регулирование может состоять в частности в насыщении расхождения усилия процентной долей предела насыщения (выраженного в данном случае в виде усилия Fsat+, Fsat-, Fsat насыщения) при помощи ограничителя 30.
Такое регулирование уровня влияния корректировки заданного тока позволяет ограничить влияние датчика усилия и, в частности, избежать резкого ускорения двигателя, способного привести к его повреждению, в случае отпускания штурвала.
Группа изобретений относится к воздушному судну, способу и устройству для управления силовой обратной связью для устройства управления воздушного судна. Устройство активного управления силовой обратной связью для устройства управления содержит вычислитель, датчик положения, привод. Для активного управления силовой обратной связью для устройства управления перемещают устройство управления с помощью привода под управлением вычислителя, измеряют текущее положение устройства управления, осуществляют модулирование тока уставки, поступающего в привод, формируют предел насыщения определенным образом, при помощи которого осуществляют насыщение тока уставки по верхнему и нижнему пределам. Воздушное судно содержит орган управления, устройство управления, устройство активного управления силовой обратной связью для устройства управления. Обеспечивается повышение надежности, точности и гибкости системы управления миништурвалом. 3 н. и 7 з.п. ф-лы, 5 ил.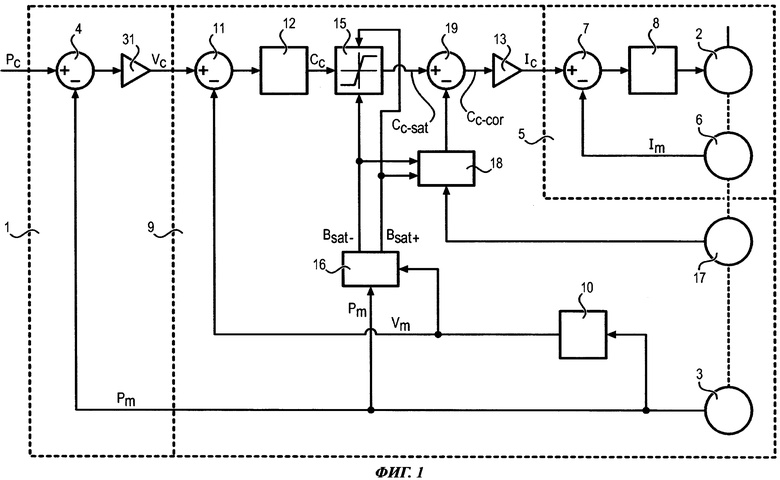
1. Устройство активного управления силовой обратной связью для устройства управления, содержащее вычислитель, датчик (3) положения, выполненный с возможностью подачи на вычислитель сигнала (Pm) текущего положения устройства управления, и привод (2), обеспечивающий перемещение устройства управления под управлением вычислителя, причем вычислитель выполнен с возможностью использования сигнала текущего положения и модулирования тока (Ic) уставки, подаваемого в привод, для обеспечения регулируемого изменения положения устройства управления, отличающееся тем, что вычислитель дополнительно выполнен с возможностью формирования по меньшей мере одного предела (Bsat, Bsat+, Bsat-, Bsat-cor) насыщения в соответствии с заранее определенной функцией (21, 23, 32) значения сигнала текущего положения, определяющей зависимость усилия от положения, и насыщения тока уставки при помощи указанного по меньшей мере одного предела насыщения.
2. Устройство по п. 1, отличающееся тем, что вычислитель обеспечивает каскадное регулирование положения привода, причем каскадное регулирование положения реализовано при помощи основного регулирующего контура (1) положения и вторичного внутреннего регулирующего контура (9) скорости.
3. Устройство по п. 2, отличающееся тем, что вычислитель дополнительно содержит модуль (10) оценки скорости, использующий сигнал (Pm) текущего положения для формирования сигнала (Vm) текущей скорости, причем вычислитель дополнительно формирует по меньшей мере один предел насыщения в соответствии с заранее определенной функцией (21, 31) значения сигнала текущей скорости, определяющей зависимость усилия от скорости.
4. Устройство по п. 1, отличающееся тем, что дополнительно содержит датчик (17) усилия, выполненный с возможностью формирования сигнала (Fm) текущего усилия, прилагаемого пользователем к устройству управления, причем вычислитель дополнительно выполнен с возможностью вычисления расхождения усилия (ΔF), соответствующего разности между сигналом текущего усилия и по меньшей мере одним пределом насыщения, и корректировки тока уставки как функции сигнала расхождения усилия.
5. Устройство по п. 4, отличающееся тем, что корректировка тока уставки состоит во вводе расхождения усилия в насыщенный ток (Cc-sat) уставки.
6. Устройство по п. 4, отличающееся тем, что корректировка тока уставки состоит во вводе расхождения усилия в по меньшей мере один предел насыщения тока уставки.
7. Устройство по п. 4, отличающееся тем, что вычислитель выполнен с возможностью регулирования уровня влияния корректировки тока уставки как функции расхождения усилия.
8. Устройство по п. 7, отличающееся тем, что регулирование уровня влияния корректировки тока уставки состоит в насыщении расхождения усилия (ΔF) процентной долей по меньшей мере одного предела насыщения.
9. Воздушное судно, содержащее орган управления воздушного судна, устройство управления для приведения органа управления воздушного судна и устройство активного управления силовой обратной связью для устройства управления по любому из предшествующих пунктов.
10. Способ активного управления силовой обратной связью для устройства управления, перемещение которого обеспечивает привод под управлением вычислителя, в котором измеряют текущее положение устройства управления и осуществляют модулирование тока уставки, поступающего в привод, для обеспечения регулирования изменения положения устройства управления, отличающийся тем, что формируют по меньшей мере один предел насыщения в соответствии с заранее определенной функцией значения измеренного текущего положения, определяющей зависимость усилия от положения, и осуществляют насыщение тока уставки по верхнему и нижнему пределам при помощи указанного по меньшей мере одного предела насыщения.
| US 5735490 A1, 07.04.1998 | |||
| УСТАНОВКА ДЛЯ ПРОФИЛИРОВАНИЯ ЛЕНТЫ | 2004 |
|
RU2279941C1 |
| ЭЛЕКТРОННОЕ УСТРОЙСТВО И СХЕМА ДЛЯ ОБЕСПЕЧЕНИЯ ТАКТИЛЬНОЙ ОБРАТНОЙ СВЯЗИ | 2008 |
|
RU2430447C1 |
| US 8050780 B2, 01.11.2011 | |||
| US 6342880 B2, 29.01.2002. | |||

