Изобретение относится к области автоматического управления при самонаведении движущегося объекта (в дальнейшем «объект») на другой движущийся объект (в дальнейшем «цель») с использованием информации о факте визирования цели при условии совпадения вектора линейной скорости объекта с осью чувствительности локатора.
Известен способ самонаведения объекта с использованием указанной информации - это «метод погони», который обеспечивает управление при самонаведении, используя информацию постоянного визирования цели, то есть вектор скорости объекта при его сближении с целью постоянно направлен на цель (В.А. Ржевкин. Радиоэлектронные системы управления ракетами и снарядами. Госкомиздат, 1996 г., ч. 1, п. 2.3, стр. 27).
При самонаведении на цель по «методу погони» траектория объекта имеет вид кривой линии, даже когда цель не маневрирует, особенно это заметно при встречном самонаведении, и при этом никакого угла упреждения не существует.
Задачей предлагаемого способа является при той же информации о цели сближение с целью по траектории с постоянным в среднем углом упреждения при неманеврирующей цели.
Для осуществления указанной задачи предлагается формировать траекторию объекта в виде сменяющих друг друга дуговых отрезков, по которым объект движется с одинаковой по модулю, но противоположной по знаку, угловой скоростью ω0, каждые два отрезка объединяют в цикл, который начинается и заканчивается фактом визирования цели.
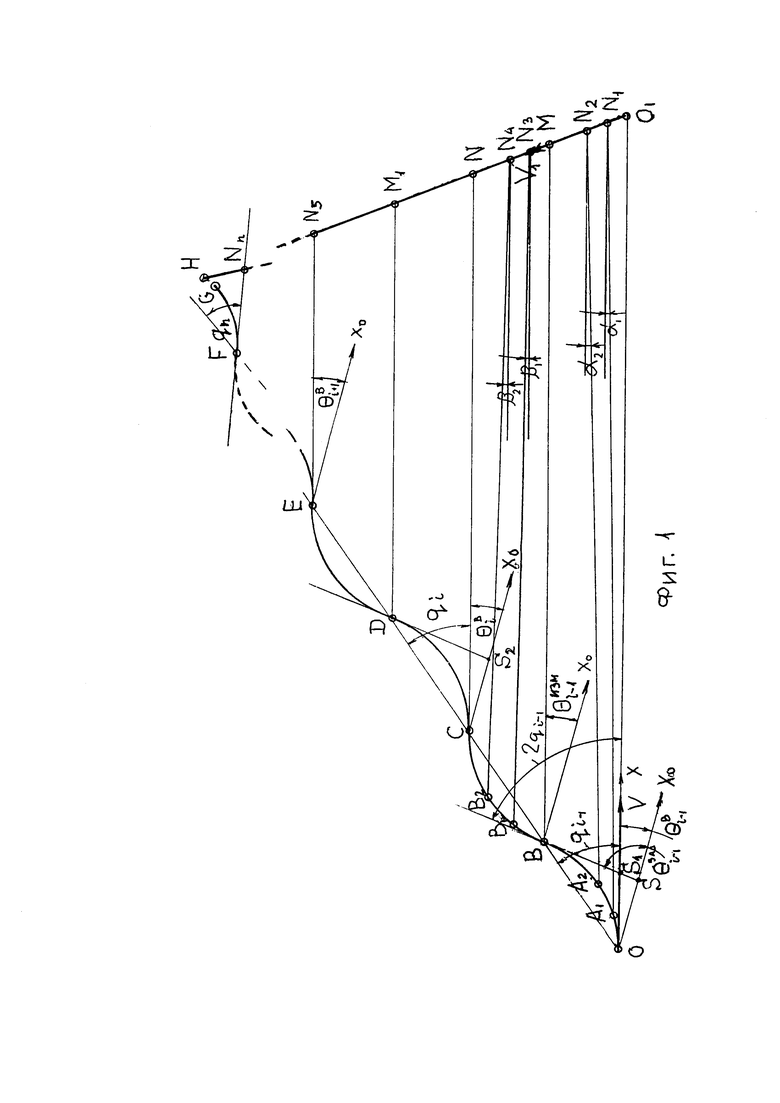
На фиг. 1 изображены две траектории:
объекта - OA1A2BB1B2CDEFG и цели - O1N1N2MN3NM1N5NnH;
O, С, E, … F - точки местоположения объекта на траектории, где он «видит» (визирует) цель. В этот момент направление его вектора скорости должно совпадать с линией визирования;
OO1, CN, EN5 ,… FNn - линии визирования цели в моменты времени «i-1», «i», «i+1», … «i+n» соответственно;
A1N1, A2N2, BM, B1N3, B2N4, CN DM1, … GH - линии, соединяющие местоположения объекта и цели в одинаковые моменты времени;
Ох0 - положение координаты инерциальной системы;
V, V1 - направления векторов объекта и цели при сближении соответственно;
Ох - направление оси максимальной чувствительности локатора;
∠O1Ox0 = ∠NCx0 = N5Ex0 - углы наклона траектории объекта в моменты визирования цели относительно инерциальной системы координат;  - значения угла в моменты времени соответственно;
- значения угла в моменты времени соответственно;
∠BOO1 = ∠ECN = … - средние углы упреждения траектории объекта в моменты времени визирования цели «i-1», «i», …, qi-1, qi„… - значения их величин.
∠BS1O1 - угол наклона траектории объекта относительно линии визирования в момент смены знака разворота; значение величины этого угла равно 2q - удвоенному значению величины среднего угла упреждения в этот момент времени;
∠BSx0 = ∠DS2x0 = углы наклона траектории объекта относительно инерциальной системы координат при смене знака разворота в моменты времени соответственно; значения их величин равны:

 соответственно.
соответственно.
Величины углов наклона линий, соединяющих местоположения объекта и цели в последующие моменты времени относительно положения линии визирования в начальные моменты цикла сближения, составляют значения α1, α2, … и имеют положительные значения вплоть до нулевого угла наклона линии ВМ относительно первоначального значения. При дальнейшем сближении объекта и цели углы наклона этих линий β1, β2 … имеют уже противоположное, отрицательное значение.
Анализ вариаций угла αi в процессе сближения объекта и цели показывает, что начиная с нулевого в точке О траектории объекта абсолютное значение этого угла увеличивается до некоторого максимума, затем снова уменьшается до нулевого значения в точке В.
Если в этой точке изменить знак разворота на противоположный, как это и показано на фиг. 1, появляющиеся абсолютные значения угла  в процессе сближения будут увеличиваться до определенного максимума, а потом уменьшаться до нового визирования цели, когда вектор скорости объекта совпадет с линией визирования. При этом характер изменений углов α и β в цикле, очевидно, будет одинаков, но с противоположными знаками, если параметры сближения (углы наклона и величины векторов скорости объекта и цели) не меняются.
в процессе сближения будут увеличиваться до определенного максимума, а потом уменьшаться до нового визирования цели, когда вектор скорости объекта совпадет с линией визирования. При этом характер изменений углов α и β в цикле, очевидно, будет одинаков, но с противоположными знаками, если параметры сближения (углы наклона и величины векторов скорости объекта и цели) не меняются.
Таким образом, если параметры сближения будут постоянными, процесс самонаведения объекта на цель будет проходить с неизменными значениями величин q,  и
и  , фиг. 1, при смене знака заданной (максимальной) угловой скорости ω0, когда значения величин углов α или β становятся равными 0.
, фиг. 1, при смене знака заданной (максимальной) угловой скорости ω0, когда значения величин углов α или β становятся равными 0.
Промах при сближении с целью на минимальное расстояние h примерно составляет значение, которое находится в пределах от 0 до величины:

где R - радиус разворота объекта с постоянной угловой скоростью ω0.
На участке максимального сближения, фиг. 1, минимальное расстояние hmax объекта от цели (промах) определяется расстоянием HG.
При изменении параметров сближения (направления и величины векторов скорости объекта и цели) указанные выше значения величин  , qn и других углов будут меняться тоже.
, qn и других углов будут меняться тоже.
Измененный угол наклона траектории (вектора скорости) объекта относительно инерциальной системы координат в конце цикла сближения будет начальным в следующем цикле.
Аппаратно процесс самонаведения по предлагаемому методу можно реализовать, по крайней мере, в трех вариантах:
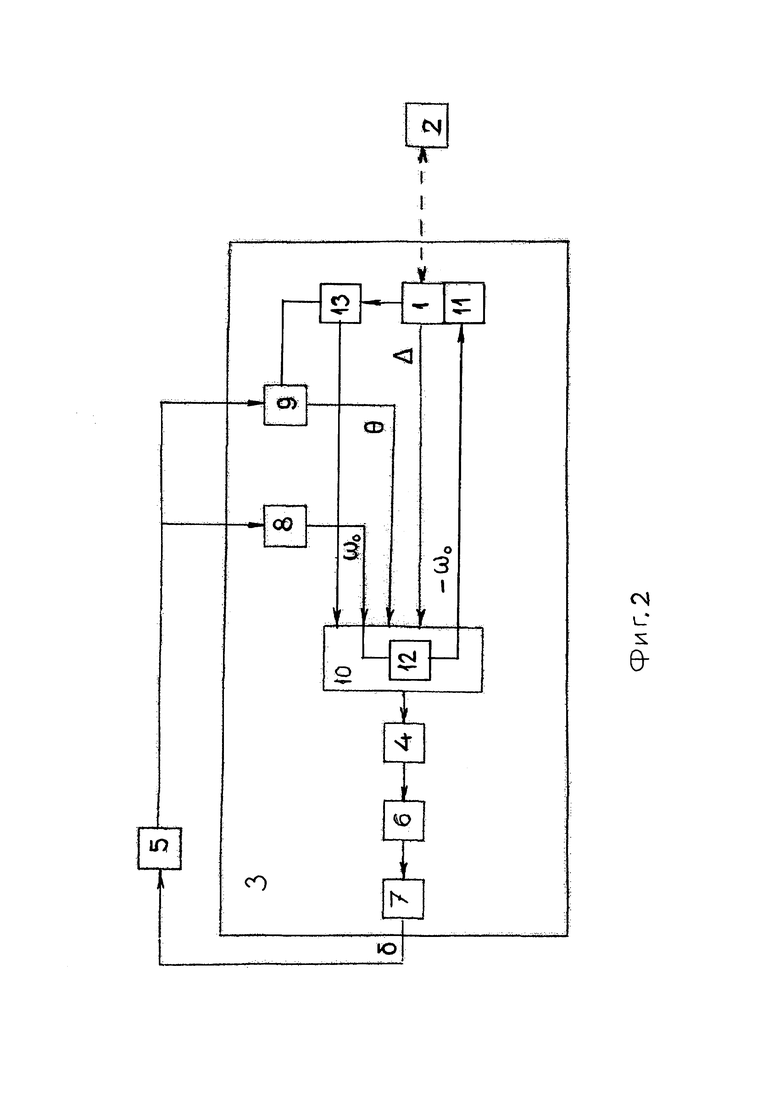
а) С помощью «сканирующего локатора», фиг. 2.
На чертеже обозначено:
1 - локатор цели, фиксирующий факт визирования цели, когда вектор скорости объекта направлен на цель, и имеющий степень свободы для поворота с равным значением угловой скорости разворота объекта, но в противоположную сторону;
2 - цель;
3 - система управления объектом, осуществляющая самонаведение;
4- цифровая вычислительная машина (далее по тексту - ЦВМ), управляющая процессом наведения по заложенным алгоритмам;
5 - объект с собственной системой стабилизации;
6 - преобразователь, осуществляющий управление рулевым приводом по командам ЦВМ;
7 - рулевой привод, реализующий управляющее воздействие на объект;
8 - измеритель значения угловой скорости объекта ω;
9 - прибор, реализующий инерциальную систему координат, оси которой являются началом отсчета углов наклона траектории объекта.
10 - устройство обмена (далее по тексту - УО), переводящее поступающую информацию на язык ЦВМ и передающее результаты отработок программных алгоритмов из ЦВМ на исполнительные устройства;
11 - привод для поворота локатора;
12 - аналоговый инвертор;
13 - устройство для измерения утла поворота локатора относительно инерциальной системы координат.
Приборы с индексами 4, 6, … 10 составляют систему управления с обратной связью 3 объекта 5 по параметрам углов и угловых скоростей.
Включенные в состав системы приборы 11, 12, 13 в совокупности с вышеуказанными и их взаимодействие позволяют реализовать предлагаемый способ самонаведения.
После получения сигнала Δ, зафиксированного локатором 1, о факте визирования цели 2 аппаратура системы управления 3 осуществляет самонаведение объекта, имеющего собственную систему стабилизации. По программе, записанной в ЦВМ 4, организуют разворот объекта 5 с постоянной угловой скоростью ω0, для чего из ЦВМ подают команду через преобразовательное устройство 6 на рулевой привод 7, который выдает управляющее воздействие δ для разворота объекта с заданной угловой скоростью ω0, текущее значение которой регистрирует устройство 8. Одновременно по сигналу Δ ЦВМ запоминает начальное и измеряет текущие значения угла наклона траектории объекта  относительно инерциальной системы координат, полученные от прибора 9. Сигналы Δ,ω, поступают в СВМ через УО 10.
относительно инерциальной системы координат, полученные от прибора 9. Сигналы Δ,ω, поступают в СВМ через УО 10.
При разворотах объекта локатору с помощью привода 11 придают обратное вращение в той же плоскости, используя инвертор 12, с такой же по модулю, но противоположной по знаку угловой скоростью ω0 относительно инерциальной системы координат (координаты Ох0).
Одновременно с помощью устройства 13 измеряют, фиг. 1, утлы наклона линий AiNi, A2N2, …, соединяющих точки одновременного нахождения объекта и цели относительно координаты х0 инерциальной системы, сравнивают в ЦВМ их значения с первоначальным значением  , в результате чего получают значение величины угла α.
, в результате чего получают значение величины угла α.
Смену знаков разворота объекта и поворота локатора производят по команде ЦВМ в точке В, фиг. 1, когда значение а станет равным нулю, при этом:

Аналогично, при обратном развороте объекта и противоположном по знаку повороте локатора в точке С, фиг. 1 снова меняют знак угловой скорости и так далее.
В связи с тем, что параметры сближения могут изменяться, углы наклона вектора скорости объекта при визировании цели в начале цикла и в конце могут быть разными. Это замечание относится и к последующим предлагаемым устройствам.
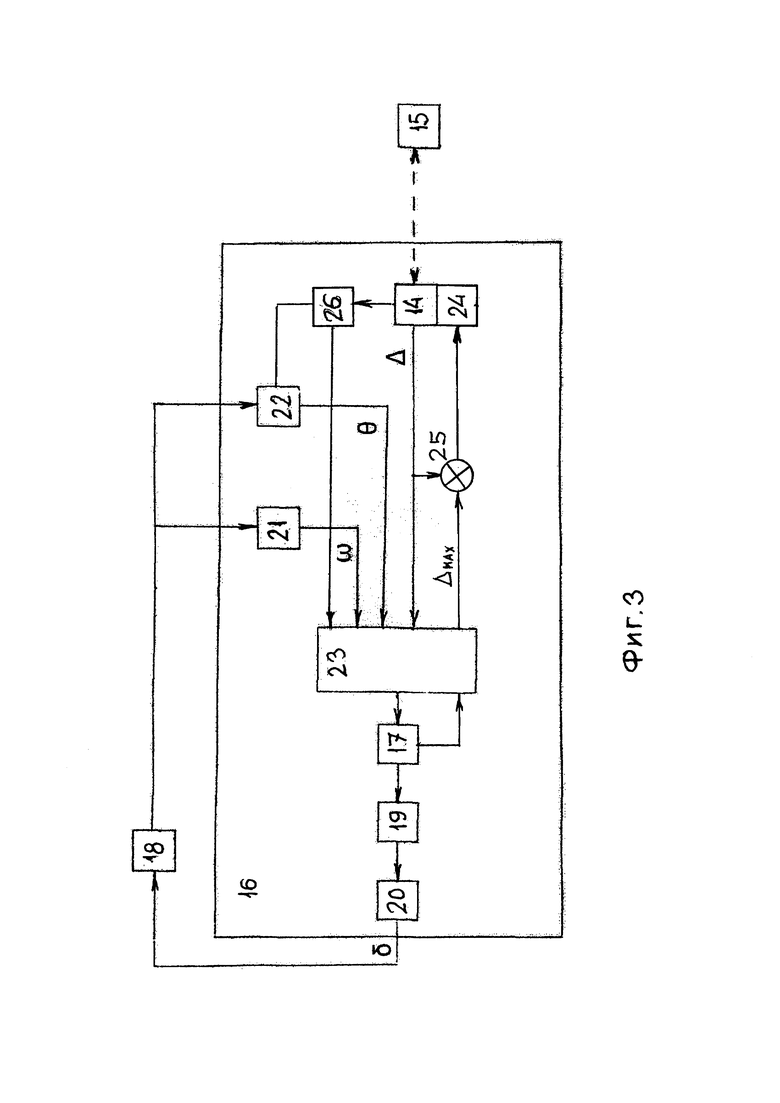
b) С помощью «следящего локатора», фиг. 3.
После получения сигнала Δ, зафиксированного локатором 14, о факте визирования цели 15 аппаратура системы управления 16 осуществляет процесс самонаведения. По программе, записанной в ЦВМ 17, организуют разворот объекта 18 с постоянной угловой скоростью ω0, для чего из ЦВМ подают команду через преобразовательное устройство 19 на рулевой привод 20, который выдает управляющее воздействие δ для разворота объекта с заданной угловой скоростью ω0, текущее значение которой регистрирует устройство 21. Одновременно, по сигналу Δ ЦВМ запоминает начальное и измеряет текущие значения утла наклона траектории объекта относительно инерциальной системы координат, полученные от прибора 22. Сигналы Δ, ω, поступают в ЦВМ через устройство обмена 23.
В данном случае при движении объекта по дугообразным отрезкам обеспечивают постоянное слежение за целью с помощью следящей системы, которая состоит из:
- локатора 14;
- привода 24 для поворота локатора и его оси максимальной чувствительности в плоскости разворотов объекта;
- системы образования обратной связи, включающей в себя УО 23 и ЦВМ 17;
- суммирующего устройства 25.
При совпадении оси максимальной чувствительности локатора 14 с линией визирования локатор выдает максимальный сигнал. Значение сигнала преобразовывают в УО 23, запоминают в ЦВМ 17 и возвращают через УО в суммирующее устройство 25, где его значение (максимальный сигнал) сравнивают с текущим значением на выходе локатора. Сигнал с выхода суммирующего устройства поступает на привод, который будет поворачивать локатор, пока значение на выходе локатора не сравняется с максимальным его значением, то есть локатор постоянно будет следить за целью.
В начальном полуцикле сближения объекта и цели значение угла поворота локатора относительно инерциальной системы координат, измеренное устройством 26, сравнивается в ЦВМ с первоначальным его значением. Полученная величина угла при постоянном слежении локатора прямо пропорциональна значению α, фиг. 1, при движении объекта по траектории от точки О до точки В. В этой точке, где угол α=0, и происходит смена знака разворота. При движении объекта от точки В до точки С слежение локатора за целью прекращают. Ось локатора совмещают с направлением вектора скорости, и когда локатор снова «увидит» цель, то есть его вектор скорости совместится с линией визирования, знак разворота меняют. Таким образом, точка С - это точка начала нового цикла сближения, когда система слежения за целью включена.
Если в предыдущем цикле менялись условия сближения, то в текущем - начальный угол наклона траектории объекта (начальный угол поворота локатора) изменится.
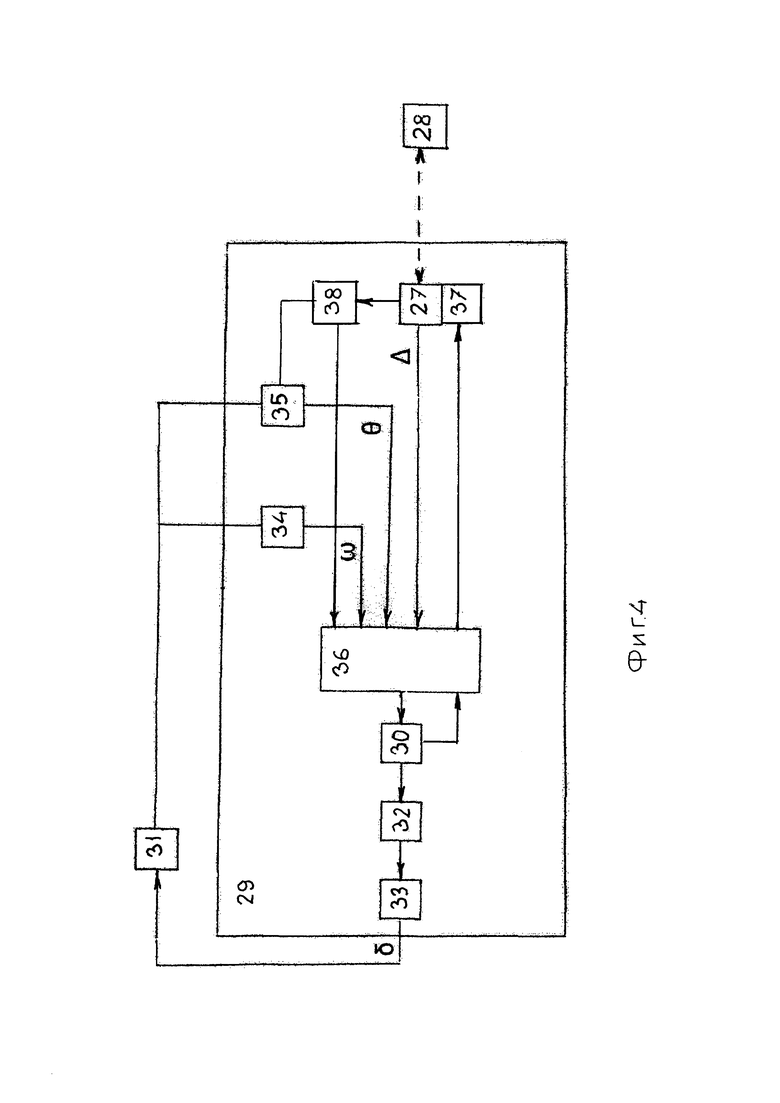
с) С помощью оптической матрицы, фиг. 4.
В данном случае в качестве локатора применена оптическая система отображения цели с электронной матрицей для преобразования величины отклонения отображения цели от центра, то есть от оси максимальной чувствительности локатора, в электрический сигнал.
После получения сигнала Δ, зафиксированного локатором 27, о факте визирования цели 28 аппаратура системы управления наведением 29 осуществляет процесс самонаведения на цель, а локатор закрепляют неподвижным относительно инерциальной системы координат в этом положении. По программе, записанной в ЦВМ 30, организуют разворот объекта 31 с постоянной угловой скоростью ω0, для чего из ЦВМ подают команду через преобразовательное устройство 32 на рулевой привод 33, который выдает управляющее воздействие δ для разворота объекта с заданной угловой скоростью ω0, текущее значение которой регистрирует устройство 34. Одновременно, по сигналу Δ ЦВМ запоминает начальное и измеряет текущее значение угла наклона траектории объекта относительно инерциальной системы координат, полученные от прибора 35. Сигналы Δ, ω, поступают в СВМ через устройство обмена 36.
Отображение цели на матрице, первоначально находящееся в центре матрицы, начнет смещаться от центра в положительную сторону прямо пропорционально значению α, фиг. 1, а потом это отклонение в процессе сближения уменьшится до нулевого значения.
В этой точке траектории меняют знак разворота, и отображение цели начнет отклоняться в отрицательную сторону от центра прямо пропорционально значению угла β, фиг. 1. Последующее изменение β закончится, когда вектор скорости объекта снова совместится с линией визирования, при этом отображение цели будет находиться в центре матрицы. В этот момент знак разворота объекта меняют, ЦВМ анализирует зафиксированное значение угла наклона траектории объекта относительно инерциальной системы координат, и если оно не совпадает с запомненным в начале (середине) цикла сближения, то с помощью привода 37 доворачивают локатор до зафиксированного значения, контролируя требуемый угол доворота по показаниям устройства 38, после чего локатор закрепляют неподвижным относительно инерциальной системы координат, проводя новый цикл сближения.
Предложенный способ самонаведения может быть использован как самостоятельно, так и в сочетании с методом погони или другими способами самонаведения.
Предложен способ самонаведения движущегося объекта по информации о факте визирования цели при условии совпадения направления оси локатора с направлением вектора скорости объекта. При этом траекторию объекта формируют в виде циклически повторяющихся дугообразных отрезков, по которым объект движется с заданной (максимальной) угловой скоростью, одинаковой по модулю, но противоположной по знаку. Каждые два отрезка объединяют в цикл, который начинается и заканчивается фактом совпадения направления вектора скорости объекта с линией визирования цели, а смену знака угловой скорости внутри цикла производят по факту совпадения углов наклона относительно инерциальной системы координат линий, соединяющих объект и цель в начале цикла и в данный момент. Также предложены устройства, реализующие указанный выше способ. 4 н.п. ф-лы, 4 ил.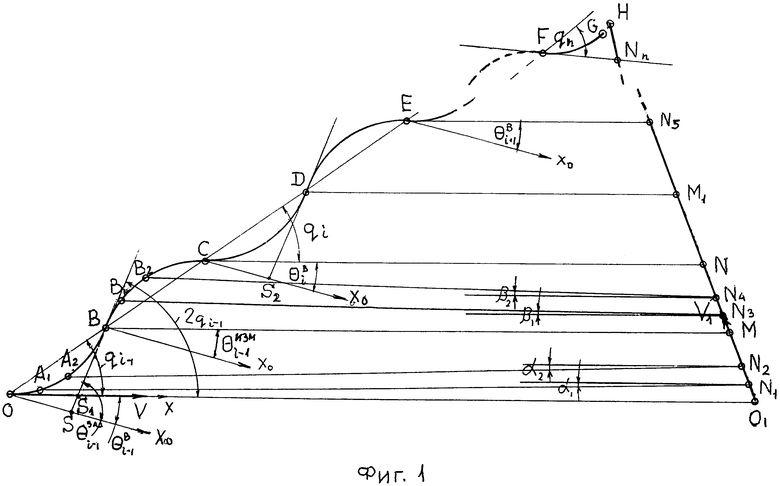
1. Способ самонаведения движущегося объекта по информации о факте визирования цели при условии совпадения направления оси локатора с направлением вектора скорости объекта, отличающийся тем, что траекторию объекта формируют в виде циклически повторяющихся дугообразных отрезков, по которым объект движется с заданной (максимальной) угловой скоростью, одинаковой по модулю, но противоположной по знаку, каждые два отрезка объединяют в цикл, который начинается и заканчивается фактом совпадения направления вектора скорости объекта с линией визирования цели, а смену знака угловой скорости внутри цикла производят по факту совпадения углов наклона относительно инерциальной системы координат линий, соединяющих объект и цель в начале цикла и в данный момент.
2. Устройство для реализации способа самонаведения по информации о факте визирования цели с использованием системы управления наведением объекта, имеющего собственную систему стабилизации, и включающее в себя локатор с возможностью сигнализации о факте визирования цели, прибор, реализующий инерциальную систему координат, измерители угловой скорости объекта и углов относительно инерциальной системы координат, цифровую вычислительную машину (ЦВМ), управляющую процессом самонаведения по заданным алгоритмам и имеющую возможность использования информации от локатора, датчиков углов и угловой скорости, аналого-цифровые преобразователи сигналов приборов на язык, понятный ЦВМ, рулевые органы с возможностью реализации циклических регулярных разворотов объекта с заданной максимальной по модулю угловой скоростью при получении через преобразовательное устройство информацию от ЦВМ для смены знаков разворотов, отличающееся тем, что в систему управления наведением включены инвертер, измеритель утла поворота локатора относительно инерциальной системы координат и привод с возможностью обратного разворота локатора с угловой скоростью, противоположной по знаку, но равной по модулю и в той же плоскости, в которой происходят развороты объекта при снятии с участвующего в процессе разворотов объекта измерителя угловой скорости показаний и направления их на инвертер, а после этого преобразования - на привод, который может повернуть локатор в соответствии с полученным в результате знаком и значением угловой скорости, при этом имеется возможность измерения устройством значение утла поворота локатора относительно инерциальной системы координат, сравнения его с запомненным в ЦВМ значением утла наклона линии визирования в начале цикла, и при достижения равенства этих значений в процессе разворота объекта - изменения по команде ЦВМ знаков разворотов объекта и локатора в середине цикла сближения, а в начале и конце цикла имеется возможность смену знаков разворотов произвести с помощью ЦВМ в моменты визирования цели - при совпадении относительно инерциальной системы координат значений углов наклона вектора скорости объекта и линии визирования.
3. Устройство для реализации способа самонаведения по информации о факте визирования цели с использованием системы управления наведением объекта, имеющего собственную систему стабилизации, и включающее в себя локатор, который имеет возможность выдать максимальный сигнал, когда ось его максимальной чувствительности направлена на цель, прибор, реализующий инерциальную систему координат, измерители угловой скорости объекта и углов относительно инерциальной системы координат, ЦВМ, управляющую процессом самонаведения по заданным алгоритмам с использованием информации от локатора, датчиков углов и угловой скорости, а также аналого-цифровые преобразователи сигналов приборов на язык, понятный ЦВМ, и рулевые органы, реализующие циклические регулярные развороты объекта с возможностью получения через преобразовательное устройство информации от ЦВМ для смены знаков разворотов, отличающееся тем, что в систему управления наведением вводят следящую систему, включающую в себя кроме ЦВМ привод для поворота локатора, измеритель угла его поворота и суммирующее устройство, имеющее возможность выдать сигнал рассогласования между максимальным значением сигнала локатора, запомненного ЦВМ в начале цикла сближения при визировании цели осью максимальной чувствительности, и текущим его сигналом с возможностью направить этот сигнал рассогласования на привод, поворачивающий локатор и его ось максимальной чувствительности до тех пор, пока сигнал рассогласования с выхода суммирующего устройства не исчезнет, то есть на выходе локатора в процессе разворота объекта в первом полуцикле после визирования цели всегда будет максимальный сигнал и локатор будет иметь возможность следить за целью, а когда измеренное значение угла поворота локатора относительно инерциальной системы координат сравняется со значением утла наклона линии первоначального визирования цели, запомненного ЦВМ, имеется возможность изменить с помощью ЦВМ знак разворота объекта, совместить и закрепить ось локатора в направлении вектора скорости, отключая тем самым следящую систему до нового совпадения направлений вектора скорости объекта и линии визирования цели, а далее процесс смены разворотов объекта будет повторяться и происходить до минимального сближения с целью.
4. Устройство для реализации способа самонаведения по информации о факте визирования цели с использованием системы управления наведением объекта, имеющего собственную систему стабилизации, и включающее в себя в качестве локатора оптическую систему отображения цели с электронной матрицей для преобразования отклонения отображения цели от ее центра, являющегося осью максимальной чувствительности локатора, в электрический сигнал, прямо пропорциональный значению величины этого отклонения, прибор, реализующий инерциальную систему координат, измерители угловых скоростей объекта и углов относительно инерциальной системы координат, ЦВМ, управляющую процессом самонаведения по заданным алгоритмам с возможностью использования информации от локатора, датчиков углов и угловой скорости, аналого-цифровые преобразователи сигналов приборов на язык, понятный ЦВМ, рулевые органы, реализующие циклические регулярные развороты объекта с возможностью получения через преобразовательное устройство информацию от ЦВМ для смены знаков разворотов, отличающееся тем, что имеется возможность после первоначального визирования цели, когда вектор скорости объекта был направлен на цель и отображение цели совпадало с центром матрицы локатора, закрепленного неподвижным относительно инерциальной системы координат, смену знака разворота объекта в середине каждого цикла сближения производить в момент, когда при развороте объекта отображение цели, отклонившись сначала в одну сторону от центра матрицы, совместится потом с ее центром, и в этот момент изменить знак разворота, в конце которого, после смещения отображения цели в другую сторону и последующим совмещением его с центром матрицы при визировании цели, снова изменить направление разворота объекта, закрепив локатор в этот момент неподвижным относительно инерциальной системы координат, а далее процесс смены полуциклов в процессе сближения с целью, вплоть до минимального будет аналогично повторяться.
| ГИРОСКОПИЧЕСКОЕ СЛЕДЯЩЕЕ ЗА ЦЕЛЬЮ УСТРОЙСТВО САМОНАВОДЯЩЕЙСЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТЫ | 2009 |
|
RU2397435C1 |
| Многоканальный ассоциативно-адресное оптическое запоминающее устройство | 1978 |
|
SU794404A1 |
| СПОСОБ УПРАВЛЕНИЯ СНАРЯДОМ | 1992 |
|
RU2021577C1 |
| УПРАВЛЯЕМАЯ РАКЕТА В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ | 2012 |
|
RU2518126C2 |

