Изобретение относится к области гидроакустики и может быть использовано для обеспечения оценки параметров движения целей в заданных районах мирового океана.
При обнаружении одной цели в системах, работающих в режиме шумопеленгования, возникает задача определения координат и параметров движения цели.
В настоящее время известен пассивный способ определения координат и параметров движения шумящей цели по информации шумопеленгаторных станций, установленных на подвижных носителях либо стационарно, без специального маневра носителя.
Решение поставленной задачи обеспечивается тем, что дополнительно к массиву пеленгов измеряют параметры сигнала цели (уровень сигнала, ширину спектра сигнала, крутизну наклона спектра сигнала и пр.), в результате обработки которых определяют тип цели и оценку дистанции до нее, затем определяют вероятностное распределение скорости цели, характерное для данного типа цели, а также вероятностные распределения оценок пеленгов и дистанций, которые учитываются при определении координат, параметров движения цели (КПДЦ). [Патент РФ №2649887, опубл. 05.04.2018 г. Способ определения координат (пеленга и дистанции) и параметров движения (курса и скорости) шумящей цели]. Недостатком описанного способа является необходимость иметь вероятностное описание параметров движения целей разных классов и необходимость дополнительного времени наблюдения.
Известен способ определения координат и параметров движения непрямолинейно движущихся целей для различных гипотез о курсе цели как функции времени и способе принятия решения о типе траектории цели [Марковская Э.М., Нерославский Б.Л. Методы определения координат и параметров движения произвольно движущихся целей в режиме шумопеленгования с двух разнесенных приемников//Гидроакустика. 2011. №13 С. 71-83]. Недостатком способа является то, что этот способ требует дополнительного времени наблюдения и наличия априорной информации о характере движения цели.
Известны методы оценки дистанции по спектру сигнала шумоизлучения цели, однако эти методы дают низкую точность оценки дистанции и не позволяют определить скорость и курс цели. [Демиденко В.А. Перельмутер Ю.С. Спектральный метод оценки дистанции//Гидроакустика. 2006. №6. С. 51-59].
При наличии обнаружения одной цели в режиме шумопеленгования в двух разнесенных системах обнаружения известен триангуляционный метод оценки дистанции, основанный на решении треугольника, при известном расстоянии между системами и оценками пеленга на цель, полученных в этих системах. Однако оценки скорости и курса цели в этом методе не определяются [Машошин А.И. Синтез оптимального алгоритма пассивного определения дистанции до цели. Морская радиоэлектроника. 2012. №2 (40)].
Таким образом, вышеупомянутые аналоги предлагаемого изобретения не способны решить задачу однозначного определения скорости и курса цели. Для его определения приходится прибегать к процессу длительного маневрирования приемной системы, что тактически и экономически не оправдано или использовать режим гидролокации, что усложняет приемную систему и нарушает скрытность носителя.
Наиболее близким по совокупности существенных признаков к предлагаемому способу является способ определения координат и параметров движения цели, путем обработки массива пеленгов цели, измеренных в N последовательные моменты времени с учетом собственного курса и скорости носителя [Беляев Б.Л., Кузьменко Ю.А., Панкратьев В.В., Степанов Д.В. «Об ожидаемом качестве оценок определения координат и параметров движения цели методом «N-пеленгов» при выбранном варианте собственного маневрирования» /Сборник докладов научно-технической конференции «Состояние, проблемы и перспективы создания корабельных информационно-управляющих комплексов». М., 2011, с. 97-101].
В соответствии с этим способом по результатам обработки массива пеленгов при прямолинейном движении цели определяют скорость (величину) изменения пеленга и нормированное отношение относительной радиальной скорости движения к дистанции, проводят маневрирование, и при маневрировании определяют все параметры движения цели: дистанцию, скорость и курс цели.
Главным недостатком данного способа является то, что он требует проведение собственного маневра цели, который в реальных условиях не всегда допустим, что ведет к невозможности решить задачу определения дистанции до цели, ее скорости и курса по информации о пеленге сигнала [Корякин Ю.А., Смирнов С.А., Яковлев Г.В.. Корабельная гидроакустическая техника. Состояние и актуальные проблемы. С-Петербург, Наука, 2004, с. 188-191].
Задачей предлагаемого изобретения является определение скорости и курса цели в режиме шумопеленгования без проведения маневрирования и длительного наблюдения за целью.
Техническим результатом от использования изобретения является определение параметров движения цели при обнаружении этой цели в двух разнесенных системах, работающих в режиме шумопеленгования без проведения дополнительного маневрирования и без длительного наблюдения за целью.
Для решения поставленной задачи предложен способ определения параметров движения цели в режиме шумопеленгования, обнаруженной первой приемной системой, включающий обработку массива пеленгов цели, измеренных в N последовательные моменты времени, с учетом собственного курса и скорости носителя первой приемной системы, определение величины изменения пеленга цели по результатам обработки, введены новые признаки, а именно; обнаружение цели производят дополнительно второй приемной системой, отстоящей от первой, обработку массива пеленгов цели и определение величины изменения пеленга производят также во второй приемной системе, производят идентификацию сигналов шумоизлучения цели, обнаруженной в каждой из двух разнесенных приемных систем, производят определение триангуляционной оценки дистанции до цели каждой из приемных систем, а определение скорости и курса цели производят, используя оценки дистанции до цели, оценки величины изменения пеленга, полученные в обеих приемных системах, а также оценки собственных скорости и курса носителя второй приемной системы.
Заявленные технические признаки обеспечивают оценку скорости и курса цели, обнаруженной в двух разнесенных системах обнаружения, работающих в режиме шумопеленгования без проведения дополнительного маневрирования.
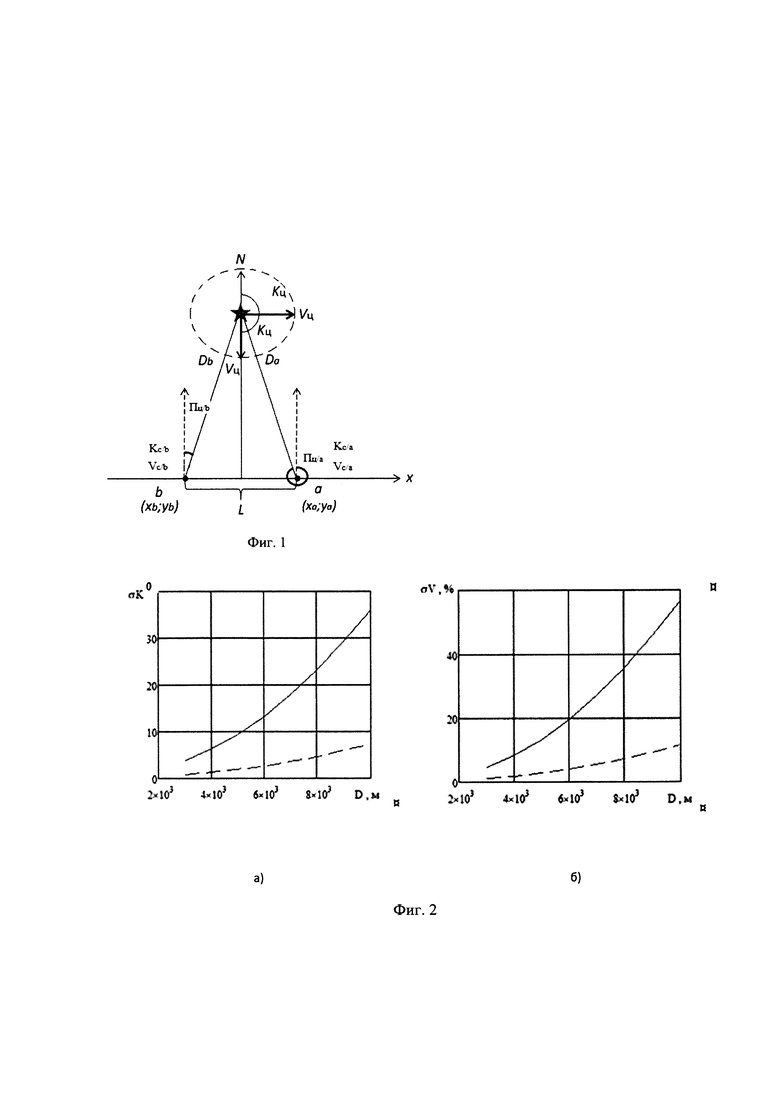
Сущность изобретения поясняется фиг. 1 и фиг. 2, где на фиг. 1 приведено начальное положение цели и двух разнесенных приемных пассивных систем, на фиг. 2 - зависимости среднеквадратических отклонений параметров движения цели от дистанции при обнаружении цели в пассивных системах наблюдения, при различных значениях ошибки пеленга σП. Показано, что с увеличением дистанции погрешности оценки курса и скорости увеличиваются. При этом, среднеквадратические отклонения параметров движения не превышают: 10% по скорости, 6° по курсу для D=10KM, L=1 км, σП=0.1.
На фиг. 1 обозначено:Vc/a,Vc/b - собственная скорость носителей приемных систем «а» и «b»; Кс/a, Kc/b - собственный курс систем «a»и «b»;
Пц/a,,Пц/b - пеленг объекта, полученный в системах «a» и «b» соответственно;
Dц/a,Dц/b, - оценки дистанции до объекта в системах «a» и «b»; Kц - курс цели;
Vц - скорость цели; Пц - пеленг на цель; (xa;ya), (xb;yb)- координаты систем «а» и «b»; L, - размер базы.
На фиг. 2 обозначено: зависимости среднеквадратических отклонений параметров движения цели от дистанции L=1000 м, Kц=135°, сплошная линия: а) σК от D, б) σv от D, σП=0.5°, пунктирная линия: а) σк от D, б) σv от D, σп=0.1°.
В общем случае системы наблюдения независимы друг от друга и могут иметь различные собственные скорости и курсы. В качестве разнесенных систем могут использоваться либо основная антенна корабля-носителя и гибкая протяженная буксируемая антенна (ГПБА), либо прием может осуществляться гидроакустическими комплексами, расположенными на различных носителях.
Реализация способа осуществляется следующим образом: цель находится на равных расстояниях от двух систем и движется заданным курсом Kц с постоянной скоростью Vц. Задача оценки параметров движения цели решается при условии, что системы обнаружения и цель движутся равномерно и прямолинейно.
Для получения оценок скорости и курса цели используется оценка дистанции, выработанная триангуляционным методом при гипотезе равномерного прямолинейного движения систем наблюдения и цели.
Оценка дистанции, определяется методом триангуляции [Машошин А.И. Синтез оптимального алгоритма пассивного определения дистанции до цели. Морская радиоэлектроника. 2012. №2 (40)] по формуле:
Учитывая, что при близких пеленгах сильно возрастает ошибка оценки дистанции [Шейнман Е.Л., Шувалова О.Н. Анализ эффективности алгоритмов идентификации сигналов и оценки дистанции объектов, обнаруженных в разнесенных системах наблюдения//Известия СПбГЭТУ «ЛЭТИ» 2013. №8. С. 60-66] задача должна решаться при Пb-Пa>εv, где εv - заданная константа.


Обозначим:


В приведенных выше формулах обозначено: ВИПц/a, ВИПц/b - величина изменения пеленга в системах «a» и «b» соответственно.
При наличии оценок пеленга, дистанции и ВИП полученных в пассивных режимах обнаружения в разнесенных системах, как показано выше, что курс и скорость цели определяются по формулам (1), (2):



Если


Если ВИП только одной системы близок к 0, то эта система считается системой b и для оценки скорости и курса используется следующий алгоритм:
Если

Если

Если оба ВИП отличны от 0, то есть:
 , то расчет проводится по
, то расчет проводится по
формулам (1), (2).
Здесь ВИПц/a, ВИПц/b - величина изменения пеленга в системах «a» и «b» αвип - ограничение по погрешности для оценки курса и скорости по ВИП; σВИПц/а, σВИПц/b среднеквадратические погрешности оценки ВИП системах «a»и «b»; ασv параметр, определяющий ограничение по среднеквадратической погрешности оценки скорости; ασК - параметр, определяющий ограничение по среднеквадратической погрешности оценки курса; σvс/а,σvс/b - среднеквадратические погрешнсти оценки собственной скорости систем «а»и «b»; σkс/а,σкс/b - среднеквадратичеоские погрешности оценки собственного курса систем «a и «b».
Таким образом, введение новых признаков позволяет получить оценки скорости и курса цели за счет использования информации о цели, полученной от двух разнесенных систем наблюдения.
Предложенный способ не требует длительного наблюдения, что позволяет получить оценки параметров движения цели за меньшее время наблюдения и увеличить точность оценки этих параметров при временном наблюдении за целью.
Достижение оценок скорости и курса цели с помощью предложенного способа подтверждается приведенными результатами расчетов (фиг. 2). На фиг. 2 представлены зависимости среднеквадратических отклонений параметров движения объекта от дистанции при различных значениях ошибки пеленга: σП=0.5°, σП=0.1°.
При расчете среднеквадратических погрешностей оценок параметров цели был использован метод линеаризации [Вентцель Е.С.Теория вероятностей. М.: «Наука», 1969]. Дисперсия оценки функции нескольких случайных аргументов Y=ϕ(x1, x2, …, хn) в первом приближении определяется по формуле:
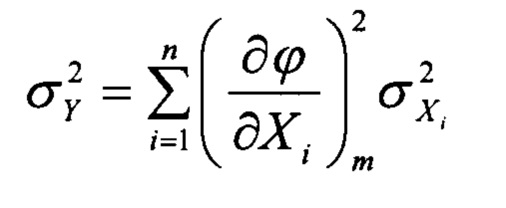
Здесь (х1, х2 … xn) - система n случайных величин, для которой заданы числовые характеристики: математические ожидания и дисперсии, mXi; - математические ожидания Xi, σxi; - среднеквадратические погрешности i-го параметра.
Таким образом, на основании приведенного примера можно считать, что заявленный технический результат, заключающийся в определении координат и параметров движения цели, при обнаружении цели в разнесенных системах в режиме шумопеленгования без проведения дополнительного маневра - достигнут.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА ПО ИЗМЕРЕНИЯМ УГЛОВЫХ КООРДИНАТ | 2016 |
|
RU2608583C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТОРПЕДЫ | 2014 |
|
RU2568935C1 |
| СИСТЕМА АКТИВНОЙ ГИДРОЛОКАЦИИ ГИДРОАКУСТИЧЕСКОЙ СТАНЦИИ | 2009 |
|
RU2393503C1 |
| Способ определения текущих координат цели в бистатическом режиме гидролокации | 2017 |
|
RU2653956C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ (ПЕЛЕНГА И ДИСТАНЦИИ) И ПАРАМЕТРОВ ДВИЖЕНИЯ (КУРСА И СКОРОСТИ) МОРСКОЙ ШУМЯЩЕЙ ЦЕЛИ | 2017 |
|
RU2649887C1 |
| Способ определения текущих координат цели в бистатическом режиме гидролокации | 2019 |
|
RU2715409C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ МАНЕВРИРУЮЩЕГО ОБЪЕКТА | 2001 |
|
RU2196341C1 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2562616C1 |
| СПОСОБ ТЕЛЕУПРАВЛЯЕМОГО НАВЕДЕНИЯ ПОДВОДНОГО АППАРАТА | 2018 |
|
RU2700827C1 |
| Способ определения класса шумящей цели и дистанции до неё | 2018 |
|
RU2681526C1 |
Использование: изобретение относится к области гидроакустики и может быть использовано для обеспечения оценки параметров движения цели при ее обнаружении в разнесенных системах шумопеленгования. Сущность: способ позволяет определять параметры движения цели, при ее обнаружении в двух разнесенных системах шумопленгования. Используются массивы пеленгов цели и величины изменения пеленгов, полученные в двух приемных системах, триангуляционные оценки дистанции до цели каждой из приемных систем, а также оценки собственных скоростей и курсов носителей приемных систем. Способ, использующий информацию двух разнесенных систем наблюдения, не требует длительного наблюдения за целью, позволяет получить оценки параметров движения цели за меньшее время наблюдения и увеличить точность оценки этих параметров при временном наблюдении за целью. Технический результат: определение координат и параметров движения цели, при обнаружении цели в разнесенных системах в режиме шумопеленгования без проведения дополнительного маневра. 2 ил.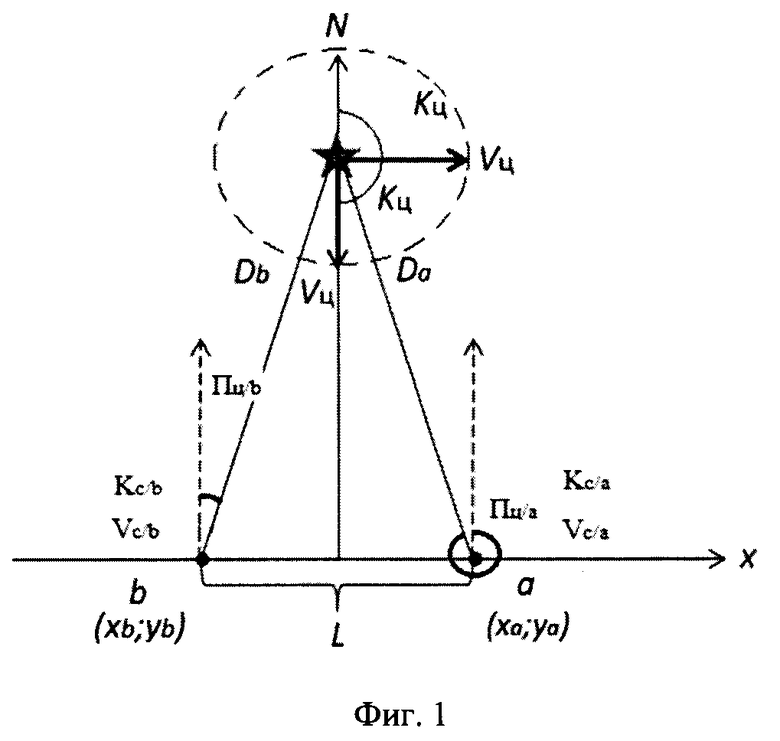
Гидроакустический способ определения параметров движения цели в режиме шумопеленгования, обнаруженной первой приемной системой, включающий обработку массива пеленгов цели, измеренных в N последовательные моменты времени с учетом собственного курса и скорости носителя первой приемной системы, определение величины изменения пеленга цели по результатам обработки, отличающийся тем, что обнаружение цели производят дополнительно второй приемной системой, отстоящей от первой, обработку массива пеленгов цели и определение величины изменения пеленга производят также во второй приемной системе, производят идентификацию сигналов шумоизлучения цели, обнаруженной в каждой из двух разнесенных приемных систем, производят определение триангуляционной оценки дистанции до цели каждой из приемных систем, а определение скорости и курса цели производят, используя оценки дистанции до цели, оценки величины изменения пеленга, полученные в обеих приемных системах, а также оценки собственных скорости и курса носителя второй приемной системы.
| Способ обработки информации в режиме шумопеленгования гидроакустического комплекса | 2022 |
|
RU2788477C1 |
| Способ получения информации о подводном шумящем объекте | 2022 |
|
RU2803528C1 |
| Система шумопеленгования гидроакустического комплекса подводной лодки | 2020 |
|
RU2735630C1 |
| СПОСОБ КЛАССИФИКАЦИИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКОГО ОБЪЕКТА | 2015 |
|
RU2603886C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТОРПЕДЫ | 2014 |
|
RU2568935C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2001 |
|
RU2208811C2 |
