Изобретение относится к измерительной технике и может быть использовано в машиностроении, приборостроении, оптической промышленности при разработке систем неразрушающего контроля отклонений плоских объектов.
Известен способ триангуляционного измерения объектов (патент РФ №45520 на полезную модель «Лазерный триангуляционный измеритель», 2004 г., G01B 11/00), при котором источник излучения формирует на поверхности исследуемого объекта световое пятно, отраженное световое излучение фокусируется на объективе приемника оптического излучения, при этом приемная система также содержит, по крайней мере, две апертурные диафрагмы, сужающие угол обзора объектива приемника, расположенные между исследуемым объектом и объективом приемника.
Известен триангуляционный способ измерения (патент США №5815272 «Filter for laser gaging system», 1996 г., G01S 17/46; G01S 17/89; G02B 5/20), при котором источник излучения формирует на поверхности исследуемого объекта световое пятно, отраженное световое излучение фокусируется на объективе приемника оптического излучения, при этом приемная система содержит две линзы, между которыми размещена щелевая диафрагма. Диафрагма располагается в фокусе первой, ближайшей к измеряемому объекту линзы и размер ее щели подбирается в соответствии с размером зондирующего пятна на поверхности объекта. Отраженное от поверхности объекта световое излучение фокусируется первой линзой в плоскость щели и сформированное таким образом промежуточное изображение, затем фокусируется в плоскость объектива, который, в свою очередь, фокусирует световое пятно на приемнике оптического излучения.
Наиболее близким по технической сущности заявляемому способу является электронно-оптический способ измерения (патент США №4248532 «Electro-optical distance-measuring system», 1978 г., G01C 3/10; G01S 17/46; (IPC 1-7): G01C 11/26; G01C 3/00; G01C 5/00), при котором источник излучения формирует на поверхности исследуемого объекта световое пятно, отраженное световое излучение фокусируется на объективе приемника оптического излучения.
Во всех вышеперечисленных способах величину отклонения исследуемого объекта определяют по отклонению центра изображения с учетом средневзвешенного значения координаты светового пятна.
Недостатком всех перечисленных способов является низкая точность определения внешних смещений центра полученного изображения вследствие того, что помимо его смещения, связанного с отклонением исследуемой точки объекта, происходит еще дополнительное случайное смещение, связанное с изменением формы самого светового пятна (например, вследствие перепада рельефа или попадания в область пятна мельчайших песчинок, капель масла и пр.), а также из-за наличия неравномерного коэффициента преломления воздуха в оптическом пути источника и приемника излучения, который может быть вызван температурным градиентом воздуха. Кроме того, перечисленные способы измерений не позволяют определить ориентацию поверхности исследуемого объекта в пространстве.
Задачей заявляемого способа является повышение точности измерений отклонений объекта и расширение функциональности за счет возможности измерять не только отклонение измеряемого объекта, но и определять его ориентацию в пространстве.
Поставленная задача решается тем, что в триангуляционном способе измерения отклонения объекта и определения его ориентации в пространстве, при котором источник излучения формирует на поверхности исследуемого объекта световое пятно, отраженное световое излучение фокусируется на объективе приемника оптического излучения, величину отклонения объекта определяют по отклонению центра изображения пятна, согласно изобретению, световое пятно представляет собой две пересекающиеся световые линии за счет освещения исследуемого объекта засветкой, в виде двух ортогональных световых ножей, при этом величину отклонения объекта определяют по координатам точки пересечения световых линий на принимаемом изображении, а ориентацию исследуемого объекта в пространстве определяют из значения углов наклона световых линий на принимаемом изображении.
За счет получения изображения в виде двух пересекающихся световых линий повышается точность измерения отклонения объекта, а также появляется возможность определять ориентацию объекта в пространстве.
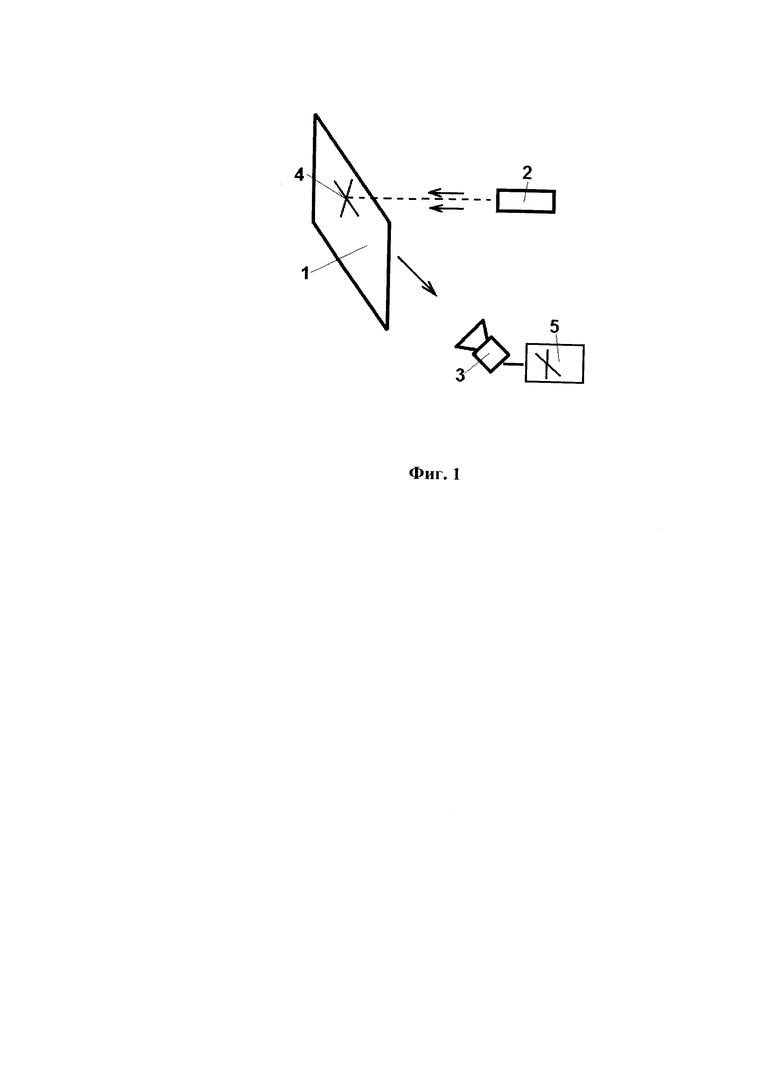
На фигуре 1 представлен общий вид устройства для осуществления триангуляционного способа измерения отклонения объекта и определения его ориентации в пространстве. Использованы следующие обозначения: 1 - исследуемый объект, 2 - источник оптического излучения, 3 - приемник оптического излучения, 4 - засветка, сформированная на поверхности объекта источником оптического излучения, 5 - изображение исследуемого объекта, полученное приемником оптического излучения.
Измерение величины отклонения объекта осуществляют следующим образом.
Исследуемый объект 1 освещают источником оптического излучения 2 и наблюдают приемником оптического излучения 3 с направления, отличного от направления освещения. Источник оптического излучения 1 формирует излучение в виде двух ортогональных световых ножей, которые образуют на поверхности исследуемого объекта засветку в виде пересечения двух линий 4. Приемник оптического излучения 3 размещают так, чтобы он мог принимать изображение объекта 1 с засветкой 4. В результате на матрице приемника оптического излучения 3 формируется изображение засветки исследуемого объекта 5. Горизонтальная координата точки пересечения световых лучей 4 на изображении 5 определяет расстояние от источника излучения 2 до исследуемого объекта 1.
В приближении отсутствия параллакса у приемника оптического излучения 3, зависимость расстояния между источником излучения 2 и исследуемым объектом 1 от горизонтальной координаты точки пересечения световых лучей 4 на изображении 5 будет линейная. Если оптическая система приемника оптического излучения будет иметь параллакс, то для точного определения расстояния до исследуемого объекта необходимо провести калибровку измерителя от расстояния до исследуемого объекта.
Калибровку расстояния до исследуемого объекта выполняют следующим образом. Берут плоскую поверхность, которую определяют калибровочной. Калибровочную поверхность размещают на различных расстояниях (как минимум на трех различных расстояниях) от источника оптического излучения, измеряют расстояние и фиксируют координаты точки пересечения световых ножей на изображении калибровочной поверхности 5 приемника оптического излучения 3. На основе полученных данных строят регрессионную функцию в виде многочлена для определения расстояния от источника оптического излучения 2 до исследуемого объекта 1 в зависимости от координаты точки пересечения световых ножей на изображении 5 исследуемого объекта 1.
Предлагаемый способ позволяет определить ориентацию поверхности исследуемого объекта 1 в пространстве, а именно определить угол наклона поверхности относительно оси X, совпадающей с нормалью к плоскости триангуляции (плоскость, образованная оптическими осями источника и приемника оптического излучения) и осью Y, расположенной в плоскости триангуляции и перпендикулярной оптической оси источника излучения 1. Для определения положения поверхности исследуемого объекта измеряют угол наклона линий относительно горизонтали на изображении 5, сформированных световыми ножами источника оптического излучения 2. Пусть угол наклона одной линии равен A, угол наклона второй линии B. Тогда угол наклона исследуемой поверхности относительно оси X монотонно зависит от разности (A-B), угол наклона исследуемой поверхности относительно оси Y монотонно зависит от суммы (A+B).
Для определения функции зависимости углов наклона относительно осей X и Y от A и B необходимо провести калибровку системы по углам.
Калибровку по углам выполняют следующим образом.
Берут плоскую поверхность, которую определяют калибровочной. Калибровочную поверхность размещают на фиксированном расстоянии от источника оптического излучения, но под разными углами относительно оси X и оси Y, измеряют угол наклона калибровочной поверхности, фиксируют углы A и B наклона световых линий на изображении 5. На основе полученных данных строят регрессионную функцию в виде многочлена для определения угла наклона относительно осей X и Y от значения углов A и B.
Предлагаемый триангуляционный способ измерения отклонения объекта и определения его ориентации в пространстве обладает существенно более низкой погрешностью по сравнению с триангуляционными способами измерения на основе точечного источника излучения. Если предположить, что эффективный диаметр светового пятна, детектируемого приемной частью измерителя с точечным источником излучения, равен D (размер пятна, по которому оценивают координаты центра для определения измеряемого расстояния), а эффективный размер линии, детектируемой приемной частью в предлагаемом изобретении, равен D×N, где D - поперечный размер линии, а N - продольный размер, причем N>>D. Учитывая, что погрешность измерения обратно пропорциональна квадратному корню площади изображения, по которому определяется точка на приемнике излучения, то в случае с точечным источником:
а в случае предлагаемого триангуляционного способа, площадь двух линий будет равна 2*D*N, а погрешность будет пропорциональна:
Из полученных оценок видно, что погрешность предлагаемого триангуляционного способа существенно меньше погрешности триангуляционных способов, использующих точечный источник излучения:
В результате повышается точность измерения и появляется возможность определить ориентацию исследуемого объекта в пространстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТРИАНГУЛЯЦИОННОГО ИЗМЕРЕНИЯ ТОЛЩИНЫ ЛИСТОВЫХ ИЗДЕЛИЙ | 2013 |
|
RU2537522C1 |
| Устройство для измерения толщины листовых изделий | 2024 |
|
RU2834575C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ ЗАДАННОЙ ОБЛАСТИ ПРОСТРАНСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375724C1 |
| Способ высокоточной калибровки дисторсии цифровых видеоканалов | 2018 |
|
RU2682588C1 |
| СПОСОБ ДИАГНОСТИКИ ДЕФЕКТОВ НА МЕТАЛЛИЧЕСКИХ ПОВЕРХНОСТЯХ | 2012 |
|
RU2522709C2 |
| Устройство для дистанционного измерения тепловых деформаций оптических элементов | 1972 |
|
SU443250A1 |
| СИСТЕМА И СПОСОБ ТРЕХМЕРНОГО ИЗМЕРЕНИЯ ФОРМЫ МАТЕРИАЛЬНЫХ ОБЪЕКТОВ | 2008 |
|
RU2521725C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТА С ПОМОЩЬЮ ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМЫ И УГОЛКОВОГО ОТРАЖАТЕЛЯ | 2014 |
|
RU2556282C1 |
| СПОСОБ ИЗМЕРЕНИЯ МЕЖЭЛЕКТРОДНОГО РАССТОЯНИЯ В ЭЛЕКТРОВАКУУМНЫХ ПРИБОРАХ | 2011 |
|
RU2468335C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2011 |
|
RU2467285C1 |
Триангуляционный способ измерения отклонения объекта и определения его ориентации в пространстве содержит этап, на котором источник излучения формирует на поверхности исследуемого объекта световое пятно в виде двух пересекающихся световых линий за счет освещения исследуемого объекта засветкой в виде двух ортогональных световых ножей. Величину отклонения исследуемого объекта определяют по отклонению центра пересечения световых линий на принимаемом изображении, а ориентацию исследуемого объекта в пространстве определяют на основании значений двух углов наклона световых линий на принимаемом изображении. Технический результат заключается в повышении точности измерений отклонений объекта. 1 ил.
Триангуляционный способ измерения отклонения объекта и определения его ориентации в пространстве, при котором на поверхности исследуемого объекта формируют световое пятно в виде двух пересекающихся световых линий, отражённое световое излучение наблюдают с направления, отличного от направления освещения, отклонение объекта в пространстве определяют по отклонению центра светового пятна на принимаемом изображении, отличающийся тем, что выполняют измерение значений двух углов наклона световых линий на принимаемом изображении светового пятна в плоскости изображения и бесконтактно определяют ориентацию исследуемого объекта в пространстве на основе значений двух углов наклона световых линий на изображении.
| US 4248532 A1 03.02.1981 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ СМЕЩЕНИЙ СЕЧЕНИЙ КРУПНОГАБАРИТНЫХ КОНСТРУКЦИЙ | 1991 |
|
RU2049307C1 |
| Устройство для обработки деталей со сложным контуром | 1976 |
|
SU655477A1 |
| Тепловой электрический измерительный прибор для суммирования показаний силы тока при ряде включений | 1927 |
|
SU6619A1 |
| Продувательный кран для паровозов | 1929 |
|
SU26709A1 |
| JP S60250201 A 10.12.1985 | |||
| JP 2008304190 A 18.12.2008 | |||
| Фотоэлектрический двухкоординатный измеритель смещений | 1987 |
|
SU1490466A1 |

