Изобретение относится к транспортному машиностроению, в частности к рулевому управлению автопоезда, состоящего из тягача и прицепного звена, связанных между собой шарнирно опирающейся на них промежуточной рамой.
Известно устройство для управления колесами большегрузного автопоезда, содержащее рулевые трапеции, связывающие поворотные колеса посредством рычагов и тяг, силовые гидроцилиндры, соединенные через распределительный золотник с напорной и сливной магистралями, копир, раз- мещенный на втулке шкворня опорно-сцепного устройства, качающийся
рычаг, взаимодействующий с копиром посредством ролика, задающий и исполнительный гидроцилиндры, пружинный стабилизатор нейтрального положения и подпиточное устройство, которое кинематически связано с копиром, а гидравлически - с задающим и исполнительными гидроцилиндрами и со сливной магистралью.
Подпиточное устройство данной системы позволяет при прямолинейном движении автопоезда, состоящего из тягача и полуприцепа, пополнять возможные утечки рабочей жидкости, а также за счет действия пружин стабилизатора устранять рассогласование в действии задающего и исполни Ч
О
ел VI о
тельного гидроцилиндров, которое может происходить в результате утечек и тем самым повышать точность отслеживания поворота колес прицепного звена по углу складывания звеньев автопоезда.
Однако данная система не позволяет устранять рассогласование в действии задающего и исполнительного гидроцилиндров автопоезда, состоящего из тягача и прицепного звена, связанных между собой шарнирно опирающейся на них промежуточной рамой из-за того, что пружинный стабилизатор при прямолинейном движении указанного автопоезда всегда находится в нейтральном положении и не может оказывать силового воздействия на шток исполнительного гидроцилиндра.
Целью изобретения является повышение точности работы системы за счет устранения рассогласования действий задающего и исполнительного гидроцилиндров при прямолинейном движении.
Для достижения цели система рулевого управления автопоезда, состоящего из тягача и прицепного звена, связанных между собой промежуточной рамой, содержащая рулевые рычажные трапеции, связанные с поворотными колесами, качающийся рычаг, кинематически соединенный с копиром и со штоком задающего гидроцилиндра, гидравлически соединенного своими полостями с полостями исполнительного гидроцилиндра, шток которого с одной стороны кинематически связан с пружинным стабилизатором нейтрального положения, а с другой - через пружинный компенсатор с основным четырехлинейным золотниковым гидрораспределителем, который механически соединен с рычагом рулевой трапеции прицепного звена, а гидравлически соединен со сливной магистралью гидробака, напорной магистралью колеса и с силовым гидроцилиндром, который механически соединен с рычагом рулевой трапеции, и под- питочное устройство, которое кинематически связано с копиром, а гидравлически - с задающим и исполнительным гидроцилиндром и со сливной магистралью, снабжена закрепленными на прицепном звене трехлинейным электроуправляемым гидрораспределителем, установленным в напорной магистрали и дополнительным четырехлинейным золотниковым гидрораспределителем, который посредством пружинного компенсатора кинематически связан с качающимся рычагом копира, а гидравлически соединен двумя линиями с силовым гидроцилиндром, третьей линией со сливной магистралью ияетвертой линией с упомянутым трехлинейным гидрораспределителем, который второй линией соединен с насосом, а третьей линией с указанным основным четырехлинейным золотниковым гидрораспределителем.
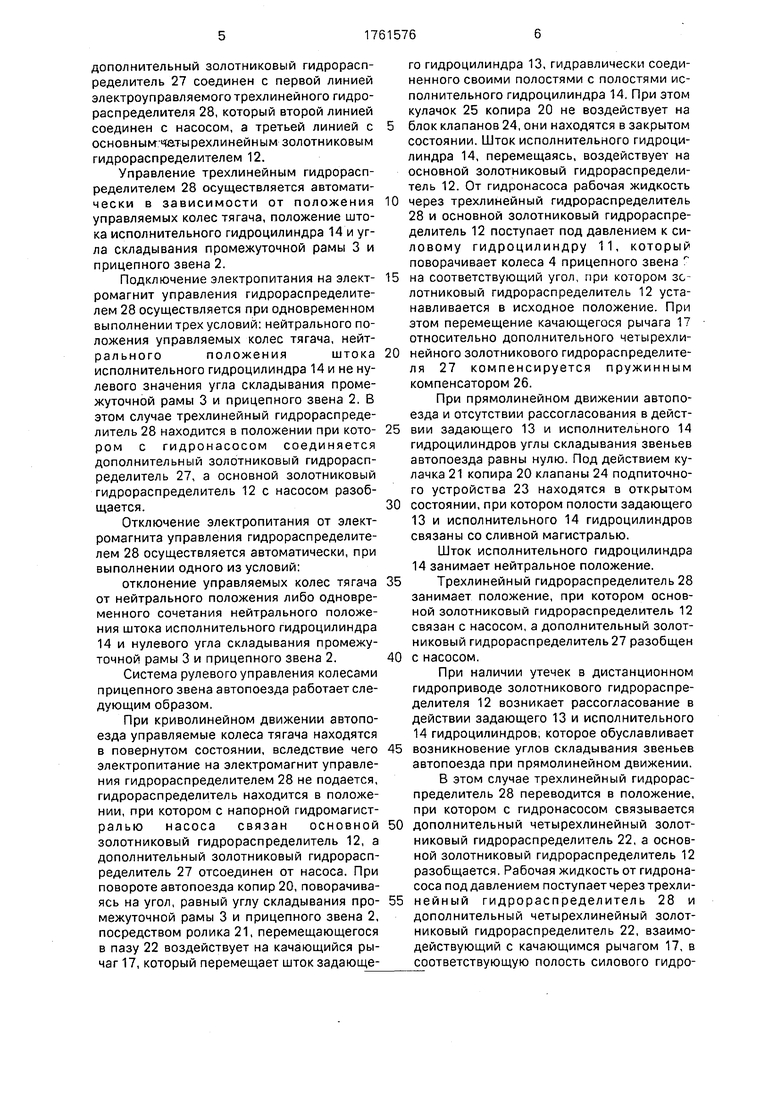
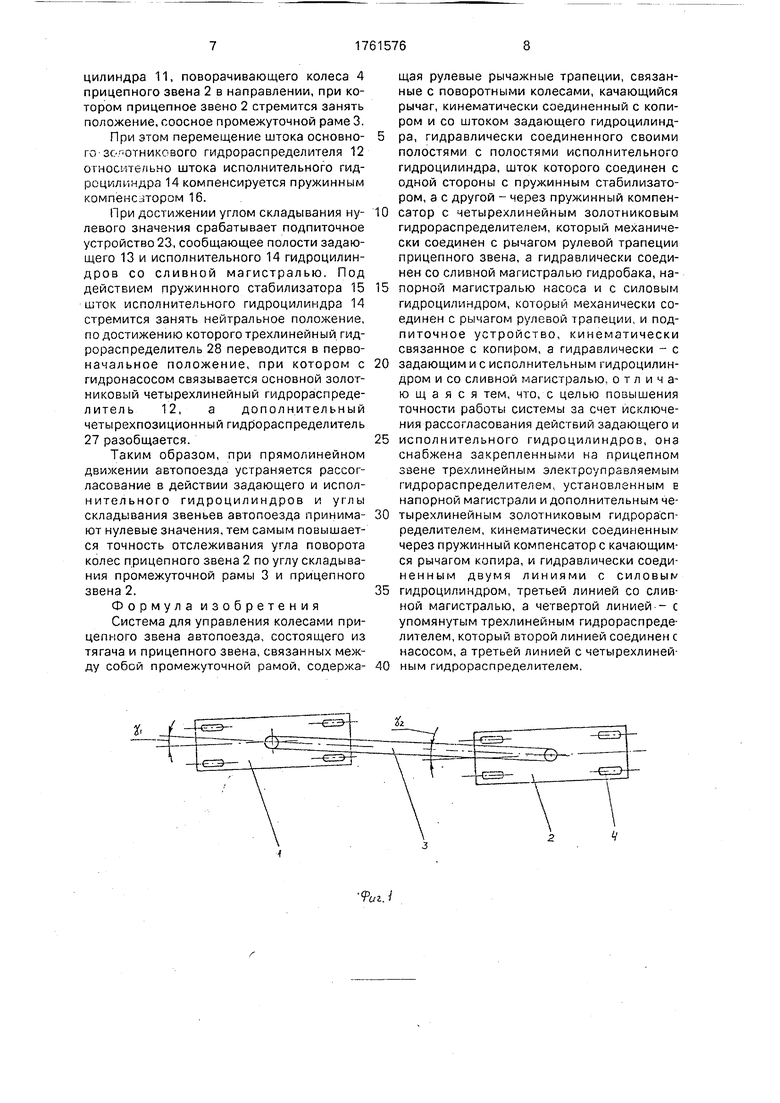
На фиг. 1 представлена схема прямолинейного движения автопоезда; на фиг. 2 - схема системы управления прицепного звена.
Система рулевого управления автопоез0 да, состоящего из тягача 1 и прицепного звена 2, связанных между собой шарнирно опирающейся на них промежуточной рамой 3, выполнена следующим образом.
Колеса 4 прицепного звена 2, поворачи5 вающиеся на шкворнях 5, соединены рулевыми трапециями, состоящими из рычагов 6 и 7, шарнирно связанных тягачами 8 и 9. Силовая и кинематическая связь между колесами разных осей прицепного звена 2
0 осуществляется тягами 10. Шток силового гидроцилиндра 11 закреплен на прицепном звене 2, соединен с рычагом 7. Управляющим элементом силового гидроцилиндра 11 служит основной четырехлинейный гидро5 распределитель 1, который шарнирно закреплен на рычаге 7 и гидравлически соединен со сливной магистралью гидробака, напорной магистралью насоса и с силовым гидроцилиндром 11. Управление
0 золотниковым распределителем 12 обеспечивается при помощи дистанционного привода, состоящего из задающего 13 и исполнительного 14 гидроцилиндров, гидравлически связанных между собой. Шток
5 исполнительного гидроцилиндра 14 оснащен пружинным стабилизатором 15 нейтрального положения и посредством пружинного компенсатора 16 связан с основным золотниковым гидрораспределите0 лем 12,
Задающий гидроцилиндр 13 приводится в действие рычагом 17, качающимся на оси 18. Рычаг 17 связан с установленным на оси 19 опорно-сцепного устройства прицеп5 ного звена 2 копиром 20 посредством ролика 21, перемещающегося в пазу 22 копира 20. Для повышения точности отслеживания угла складывания и предотвращения накопления ошибки дистанционный привод зо0 лотникового гидрораспределителя 12 оснащен подпиточным устройством 23 с блоком клапанов 24, взаимодействующих с кулачком 25 копира 20.
С качающимся рычагом 17 посредством
5 пружинного компенсатора 26 связан шток дополнительного четырехлинейного золотникового гидрораспределителя 27,который первой и второй линиями соединен с силовым гидроцилиндром 11, а третьей линией - со сливной магистралью. Четвертой линией
дополнительный золотниковый гидрораспределитель 27 соединен с первой линией электроуправляемого трехлинейного гидрораспределителя 28, который второй линией соединен с насосом, а третьей линией с основным-четырехлинейным золотниковым гидрораспределителем 12.
Управление трехлинейным гидрораспределителем 28 осуществляется автоматически в зависимости от положения управляемых колес тягача, положение штока исполнительного гидроцилиндра 14 и угла складывания промежуточной рамы 3 и прицепного звена 2.
Подключение электропитания на электромагнит управления гидрораспределителем 28 осуществляется при одновременном выполнении трех условий: нейтрального положения управляемых колес тягача, нейтральногоположенияштокаисполнительного гидроцилиндра 14 и не нулевого значения угла складывания промежуточной рамы 3 и прицепного звена 2. В этом случае трехлинейный гидрораспределитель 28 находится в положении при котором с гидронасосом соединяется дополнительный золотниковый гидрораспределитель 27, а основной золотниковый гидрораспределитель 12 с насосом разобщается.
Отключение электропитания от электромагнита управления гидрораспределителем 28 осуществляется автоматически, при выполнении одного из условий:
отклонение управляемых колес тягача от нейтрального положения либо одновременного сочетания нейтрального положения штока исполнительного гидроцилиндра 14 и нулевого угла складывания промежуточной рамы 3 и прицепного звена 2.
Система рулевого управления колесами прицепного звена автопоезда работает следующим образом.
При криволинейном движении автопоезда управляемые колеса тягача находятся в повернутом состоянии, вследствие чего электропитание на электромагнит управления гидрораспределителем 28 не подается, гидрораспределитель находится в положении, при котором с напорной гидромагистралью насоса связан основной золотниковый гидрораспределитель 12, а дополнительный золотниковый гидрораспределитель 27 отсоединен от насоса. При повороте автопоезда копир 20, поворачиваясь на угол, равный углу складывания промежуточной рамы 3 и прицепного звена 2, посредством ролика 21, перемещающегося в пазу 22 воздействует на качающийся рычаг 17, который перемещает шток задающего гидроцилиндра 13, гидравлически соединенного своими полостями с полостями исполнительного гидроцилиндра 14. При этом кулачок 25 копира 20 не воздействует на
5 блок клапанов 24, они находятся в закрытом состоянии. Шток исполнительного гидроцилиндра 14, перемещаясь, воздействует на основной золотниковый гидрораспределитель 12. От гидронасоса рабочая жидкость
0 через трехлинейный гидрораспределитель 28 и основной золотниковый гидрораспределитель 12 поступает под давлением к силовому гидроцилиндру 11, который поворачивает колеса 4 прицепного звена
5 на соответствующий угол, при котором зс- лотниковый гидрораспределитель 12 устанавливается в исходное положение. При этом перемещение качающегося рычага 17 относительно дополнительного четырехли0 нейного золотникового гидрораспределителя 27 компенсируется пружинным компенсатором 26.
При прямолинейном движении автопоезда и отсутствии рассогласования в дейст5 вии задающего 13 и исполнительного 14 гидроцилиндров углы складывания звеньев автопоезда равны нулю. Под действием кулачка 21 копира 20 клапаны 24 подпиточно- го устройства 23 находятся в открытом
0 состоянии, при котором полости задающего
13и исполнительного 14 гидроцилиндров связаны со сливной магистралью.
Шток исполнительного гидроцилиндра
14занимает нейтральное положение.
5 Трехлинейный гидрораспределитель 28 занимает положение, при котором основной золотниковый гидрораспределитель 12 связан с насосом, а дополнительный золотниковый гидрораспределитель 27 разобщен
0 с насосом.
При наличии утечек в дистанционном гидроприводе золотникового гидрораспределителя 12 возникает рассогласование в действии задающего 13 и исполнительного 14 гидроцилиндров, которое обуславливает
5 возникновение углов складывания звеньев автопоезда при прямолинейном движении. В этом случае трехлинейный гидрораспределитель 28 переводится в положение, при котором с гидронасосом связывается
0 дополнительный четырехлинейный золотниковый гидрораспределитель 22, а основной золотниковый гидрораспределитель 12 разобщается. Рабочая жидкость от гидронасоса под давлением поступает через трехли5 нейный гидрораспределитель 28 и дополнительный четырехлинейный золотниковый гидрораспределитель 22, взаимодействующий с качающимся рычагом 17, в соответствующую полость силового гидроцилиндра 11, поворачивающего колеса 4 прицепного звена 2 в направлении, при котором прицепное звено 2 стремится занять положение, соосное промежуточной раме 3.
При этом перемещение штока основного золотникового гидрораспределителя 12 огностельно штока исполнительного гидроцилиндра 14 компенсируется пружинным компенсатором 16.
При достижении углом складывания нулевого значения срабатывает подпиточное устройство 23, сообщающее полости задающего 13 и исполнительного 14 гидроцилиндров со сливной магистралью. Под действием пружинного стабилизатора 15 шток исполнительного гидроцилиндра 14 стремится занять нейтральное положение, по достижению которого трехлинейный гидрораспределитель 28 переводится в первоначальное положение, при котором с гидронасосом связывается основной золотниковый четырехлинейный гидрораспреде- литель 12, а дополнительный четырехпозиционный гидрораспределитель 27 разобщается.
Таким образом, при прямолинейном движении автопоезда устраняется рассогласование в действии задающего и исполнительного гидроцилиндров и углы складывания звеньев автопоезда принимают нулевые значения, тем самым повышается точность отслеживания угла поворота колес прицепного звена 2 по углу складывания промежуточной рамы 3 и прицепного звена 2.
Формула изобретения
Система для управления колесами прицепного звена автопоезда, состоящего из тягача и прицепного звена, связанных между собой промежуточной рамой, содержащая рулевые рычажные трапеции, связанные с поворотными колесами, качающийся рычаг, кинематически соединенный с копиром и со штоком задающего гидроцилиндра, гидравлически соединенного своими полостями с полостями исполнительного гидроцилиндра, шток которого соединен с одной стороны с пружинным стабилизатором, а с другой - через пружинный компенсатор с четырехлинейным золотниковым гидрораспределителем, который механически соединен с рычагом рулевой трапеции прицепного звена, а гидравлически соединен со сливной магистралью гидробака, напорной магистралью насоса и с силовым гидроцилиндром, который механически соединен с рычагом рулевой трапеции, и подпиточное устройство, кинематически связанное с копиром, а гидравлически - с
задающим и с исполнительным гидроцилиндром и со сливной магистралью, отличающаяся тем, что, с целью повышения точности работы системы за счет исключения рассогласования действий задающего и
исполнительного гидроцилиндров, она снабжена закрепленными на прицепном звене трехлинейным элекгроупрзвляемым гидрораспределителем, установленным Е напорной магистрали и дополнительным четырехлинейным золотниковым гидрораспределителем, кинематически соединенные через пружинный компенсатор с качающимся рычагом копира, и гидравлически соеди- ненным двумя линиями с силовые
гидроцилиндром, третьей линией со сливной магистралью, а четвертой линией - с упомянутым трехлинейным гидрораспределителем, который второй линией соединен с насосом, а третьей линией с четырехлинейным гидрораспределителем.

| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСАМИ ПРИЦЕПНОГО ЗВЕНА АВТОПОЕЗДА | 1991 |
|
RU2033361C1 |
| Система рулевого управления колесами прицепного звена автопоезда | 1990 |
|
SU1794781A2 |
| Система рулевого управления автопоезда | 1987 |
|
SU1474016A1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ БОЛЬШЕГРУЗНОГО СЕДЕЛЬНОГО АВТОПОЕЗДА | 2006 |
|
RU2312034C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2613132C2 |
| Система рулевого управления многозвенного большегрузного седельного автопоезда | 1988 |
|
SU1664643A1 |
| Система рулевого управления колесами прицепного звена автопоезда | 1990 |
|
SU1794782A2 |
| Система рулевого управления автопоезда | 1983 |
|
SU1131738A1 |
| Устройство для управления колесамиполуприцепа | 1970 |
|
SU509485A1 |
| Система рулевого управления колесами прицепного звена автопоезда | 1989 |
|
SU1740229A1 |

Использование: в системах управления колесами прицепного звена автопоезда. Сущность изобретения: система для управления колесами прицепного звена автопоезда, который состоит из тягача 1 и прицепного звена 2, связанных между собой промежуточной рамой 3, содержит вые рычажные трапеции, связанные с поворотными колесами 4, качающийся рычаг 17, кинематически соединенный с копиром 20 и со штоком задающего гидроцилиндра 13, гидравлически соединенного своими полостями с полостями исполнительного гидроцилиндра 14, шток которого соединен с пружинным стабилизатором 15 и с четырехлинейным гидрораспределителем 12, который механически соединен с рычагом рулевой трапеции прицепного звена. При криволинейном движении автопоезда управляемые колеса находятся в повернутом положении, дополнительный гидрораспределитель 27 отсоединен от насоса. При повороте автопоезда копир 20 перемещает шток задающего гидроцилиндра 13 и рабочая жидкость подается к силовому гидроцилиндру 11.2 ил. Ё
23 If 25
12
1й лИ1шн1
.
-К
-S
и
У . е -сщеи
фиг.2
t
| Устройство для управления колесамиполуприцепа | 1970 |
|
SU509485A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
| N | |||
