1
(21)4651829/11
(22) 19.1288
(46)23.0791 Бюл. №27
(72) Г И Гладков, С.Ю Кузнецов, Ю.Б Моторин, Е.сЬ.Степанов, В.И Сливинский,
А.В.Тито9 и А.Ю.Шведов
(53)629/. 13014.5(0888)
(56)Авторское свидетельство СССР Ne 509485, кл. В 62 D 13/00, 1970
(54) СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ МНОГОЗВЕННОГО БОЛЬШЕГРУЗНОГО СЕДЕЛЬНОГО АВТОПОЕЗДА
(57)Изобретение относится к транспортному машиностроению, в частности к системам рулевого управления многозвенных большегрузных седельных автопоездов Цель изобретения - улучшение управляемости путем уменьшения предельных отклонений траекторий полуприцепа от траектории тягача при прохождении криволинейных
участков пути Система содержит рулевые трапеции тягача и прицепного звена, связанные с поворотными колесами, качающийся рычаг 13, кинематически связанный с копиром 15 и со штоком задающего гидроцилиндра 10, гидравлически соединенного своими полостями посредством гидролинии с полостями исполнительного гидроцилиндра 11, шток которого кинематически связан через распределительный золотник 9 с силовым гидроцилиндром 8, механически свя- занным посредством тяг с рулевой трапецией прицепного звена, и дополнительный гидроцилиндр 17, При работе системы рулевого управления за счет использования дополнительного гидроцилиндра 17 обеспечивается коррекция обье- мов задающего и исполнительного гидроцилиндров и, как следствие уменьшение предельных отклонений траекторий полуприцепа от траектории тягача 2 ил.
00
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ БОЛЬШЕГРУЗНОГО СЕДЕЛЬНОГО АВТОПОЕЗДА | 2006 |
|
RU2312034C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2613132C2 |
| Система рулевого управления колесами прицепного звена автопоезда | 1989 |
|
SU1740229A1 |
| Система рулевого управления колесами прицепного звена автопоезда | 1990 |
|
SU1794781A2 |
| Система для управления колесами прицепного звена автопоезда | 1990 |
|
SU1761576A1 |
| Система рулевого управления автопоезда | 1983 |
|
SU1131738A1 |
| Устройство для управления колесамиполуприцепа | 1970 |
|
SU509485A1 |
| Система рулевого управления автопоезда | 1987 |
|
SU1474016A1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСАМИ ПРИЦЕПНОГО ЗВЕНА АВТОПОЕЗДА | 1991 |
|
RU2033361C1 |
| Система рулевого управления колесами прицепного звена автопоезда | 1990 |
|
SU1794782A2 |
Изобретение относится к транспортному машиностроению, в частности к системам рулевого управления многозвенных большегрузных седельных автопоездов. Цель изобретения - улучшение управляемости путем уменьшения предельных отклонений траекторий полуприцепа от траектории тягача при прохождении криволинейных участков пути. Система содержит рулевые трапеции тягача и прицепного звена, связанные с поворотными колесами, качающийся рычаг 13, кинематически связанный с копиром 15 и со штоком задающего гидроцилиндра 10, гидравлически соединенного своими полостями посредством гидролинии с полостями исполнительного гидроцилиндра 11, шток которого кинематически связан через распределительный золотник 9 с силовым гидроцилиндром 8, механически связанного посредством тяг с рулевой трапецией прицепного звена, и дополнительный гидроцилиндр 17. При работе системы рулевого управления за счет использования дополнительного гидроцилиндра 17 обеспечивается коррекция объемов задающего и исполнительного гидроцилиндров и, как следствие, уменьшение предельных отклонений траекторий полуприцепа от траектории тягача. 2 ил.
78 77 73
4
СО
Фиг.1
Изобретение относится к транспортному машиностроению, в частности к рулевому управлению многозвенных большегрузных седельных автопоездов.
Цель изобретения - улучшение управляемости путем уменьшения предельных отклонений траекторий полуприцепа от траектории тягача при прохождении криволинейных участков пути.
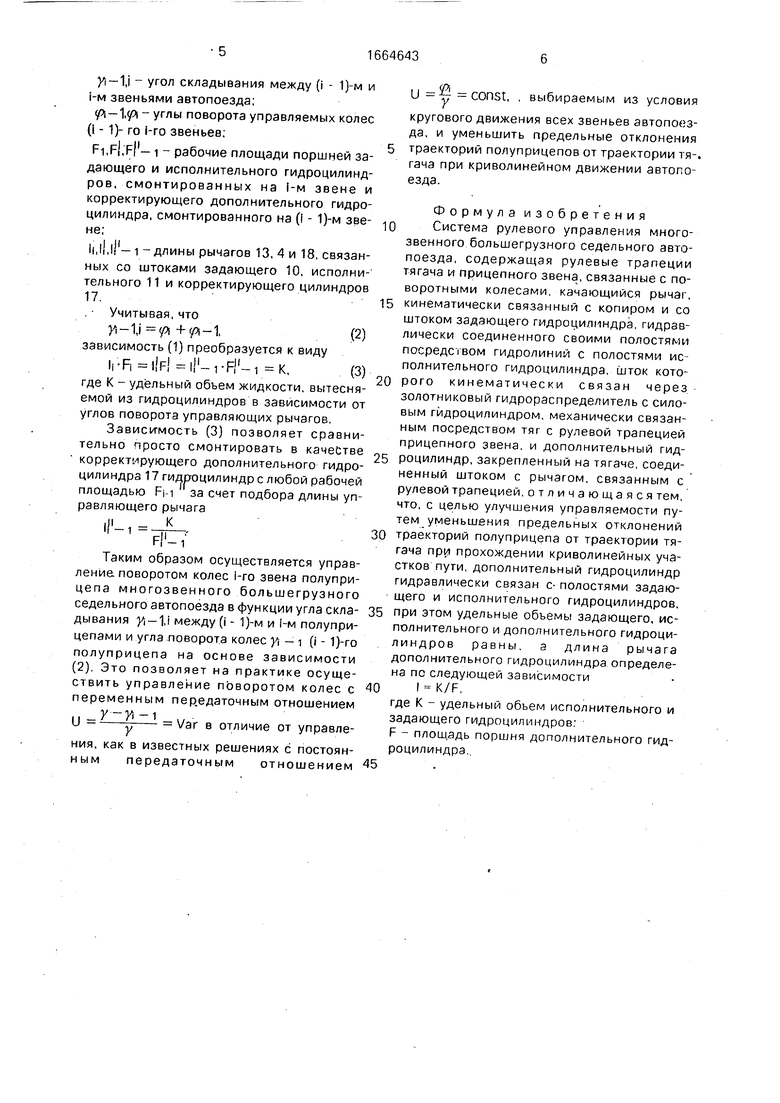
На фиг. 1 представлена схема системы рулевого управления; на фиг. 2 - гидравлическая схема устройства.
Система рулевого управления содержит колеса 1 полуприцепа , поворачивающиеся на шкворнях 2, соединенных с рулевыми трапециями, состоящими из рычагов 3 и 4, шарнирно связанных тягами 5 и 6.
Силовая и кинематическая связь между колесами разных осей полуприцепа i осуществляется тягами 7. Шток силового гидроцилиндра 8-соединен с рычагом 4.
Управляющим элементом гидроцилиндра 8 служит распределительный золотник 9, который шарнирно закреплен на рычаге 4 и через рычаг 7 имеет обратную механическую связь с силовой системой рычагов поворота колес полуприцепа.
Управление золотником 9 обеспечивается при помощи дистанционного привода с гидравлической кинематической связью, состоящего из задающего 10 и исполнительного 11 гидроцилиндров, соединенных между собой трубопроводом 12. Источником энергии для работы силовых гидроцилиндров 8 служит гидронасос, связанный с ними известной гидросхемой (не показана).
Задающий гидроцилиндр 10 приводится в действие рычагом 13, качающимся на оси 14, который приводится в действие от копира 15 через ролик 16. Копир 15 механически связан с опорно-сцепным устройством полуприцепа (не показан) таким образом, что поворачивается при складывании полуприцепа на угол, равный углу складывания полуприцепов.
На предыдущем звене (на тягаче или же (I - 1)-м полуприцепе) смонтирован дополнительный гидроцилиндр 17, корректирующий объемы задающего 10 и исполнительного 11 гидроцилиндров.
Дополнительный корректирущий гидроцилиндр 17 своими полостями непосредственно соединен с полостями задающего 10 и исполнительного 11 гидроцилиндров, а штоком гидроцилиндр 17 соединен с рычагом 18, связанным с рулевой трапецией предыдущего звена (тягача или полуприцепа). Таким образом, задающий гидроцилиндр 10 связан с качающимся рычагом. 13 длиной li, исполнительный гидроцилиндр 11
связан с качающимся рычагом 4 длиной li, а корректирующий гидроцилиндр 17 связан
с рычагом 18 длиной ||-1,.
Система управления колесами полуприцепа работает следующим образом.
При криволинейном движении автопоезда колеса 1 (i - 1)-го звена (полуприцепа) поворачиваются на угол р - 1 и возникает
Q угол складывания yi -1,i между (i - 1)-м и i-м звеньями (тягачом и полуприцепами). При этом обеспечивается поворот копира 15 на такой же угол. Ролик 16, перемещаясь по пазу копира 15 через рычаг 13 переме5 щает шток задающего гидроцилиндра 10 дистанционного гидравлического привода золотника 9.
Объем жидкости, вытесняемой из зада-- ющего гидроцилиндра 10, распределяется
о между дополнительным корректирующим 17 и исполнительным 11 гидроцилиндрами. Исполнительный гидроцилиндр 11 открывает золотник 9. От гидронасоса рабочая жидкость поступает под давлением к силовому
5 гидроцилиндру 8, который через систему рычагов и тяги поворачивает колеса 1 i-ro звена (полуприцепа) на угол р , при котором золотник 9 через механическую обратную связь устанавливается в исходное
о положение.
На малом радиусе кривизны пути отклонения траектории значительны, колеса (i - 1)-го звена-тягача поворачиваются на большой угол и тогда перемещение рычага
5 18 корректирующего гидроцилиндра 17 велико и доля вытесненного из него объема в корректирующем процессе возрастает, т.е. при входе в поворот на малом радиусе (i - 1)-го звена (тягача) рычаг 18 перемещается
0 на величину, зависящую от угла поворота колес предыдущего звена, и, влияя своей длиной на перемещение поршня корректирующего гидроцилиндра.17, создает определенный дополнительный объ5 ем, который соответствует данной кривизне, вытесняет этот объем в соединительную магистраль 12 между задающим гидроцилиндром 10 и исполнительным гидроцилиндром 11, соо здавая переменное передаточное отношение, зависящее от кривизны пути.
При соблюдении равенства объемов жидкости, вытесняемой между задающими 5 Ю, исполнительным 11 и корректирующим дополнительным 17 гидроцилиндрами, существует зависимость
yi-i.|l|Fi 0l|F| +0-1U -rFll-i (D где I 2, ... п;
У| -1j складывания между (i - 1}-м и i-м звеньями автопоезда;
Р( - fl углы поворота управляемых колес (i - 1)- го 1-го звеньев;
FI,FI,F| - i - рабочие площади поршней задающего и исполнительного гидроцилиндров, смонтированных на i-м звене и корректирующего дополнительного гидроцилиндра, смонтированного на (i - 1)-м зве- не;
li.l . 1 длины рычагов 13, 4 и 18, связанных со штоками задающего 10, исполнительного 11 и корректирующего цилиндров 17.
Учитывая, что
,.(2)
зависимость (1) преобразуется к виду
|| -гИ -1 К.(3)
где К - удельный объем жидкости, вытесняемой из гидроцилиндров в зависимости от углов поворота управляющих рычагов.
Зависи-мость (3) позволяет сравни
тельно просто смонтировать в качестве корректирующего дополнительного гидроцилиндра 17 гидроцилиндр с любой рабочей площадью Fj-i за счет подбора длины управляющего рычага
IJ.- К
F| -i
Таким образом осуществляется управление поворотом колес 1-го звена полупри- цепа многозвенного большегрузного седельного автопоезда в функции угла скла- дывания у, -1,1 между (i - 1)-м и I-м полуприцепами и угла поворота колес (i - 1)-го полуприцепа на основе зависимости (2). Это позволяет на практике осуществить управление поворотом колес с переменным пер.едаточным отношением
U Var в отличие от управления, как в известных решениях с постоянным передаточным отношением
5
0
5
0
5 0
5
U const, , выбираемым из условия
кругового движения всех звеньев автопоезда, и уменьшить предельные отклонения траекторий полуприцепов от траектории тя-. гача при криволинейном движении автопоезда.
Формула изобретения Система рулевого управления многозвенного большегрузного седельного автопоезда, содержащая рулевые трапеции тягача и прицепного звена, связанные с поворотными колесами, качающийся рычаг, кинематически связанный с копиром и со штоком задающего гидроцилиндра, гидравлически соединенного своими полостями посредс вом гидролиний с полостями исполнительного гидроцилиндра, шток которого кинематически связан через золотниковый гидрораспределитель с силовым гйдроцилиндром, механически связанным посредством тяг с рулевой трапецией прицепного звена, и дополнительный гидроцилиндр, закрепленный на тягаче, соединенный штоком с рычагом, связанным с рулевой трапецией, отличающаяся тем, что, с целью улучшения управляемости путем уменьшения предельных отклонений траекторий полуприцепа от траектории тягача при прохождении криволинейных участков пути, дополнительный гидроцилиндр гидравлически связан с- полостями задающего и исполнительного гидроцилиндров, при этом удельные обьемы задающего, исполнительного и дополнительного гидроцилиндров равны, а длина рычага дополнительного гидроцилиндра определена по следующей зависимости
I K/F,
где К - удельный объем исполнительного и задающего гидроцилиндров; F - площадь поршня дополнительного гидроцилиндра.
