Изобретение относится к транспортному машиностроению, в частности к рулевому управлению автопоезда, состоящего из тягача и прицепного звена, связанных между собой шарнир- но опирающейся на них промежуточной рамой.
Целью изобретения является улучшение управляемости путем уменьшения предельного отклонения траекторией звеньев автопое.зда от заданного значения.
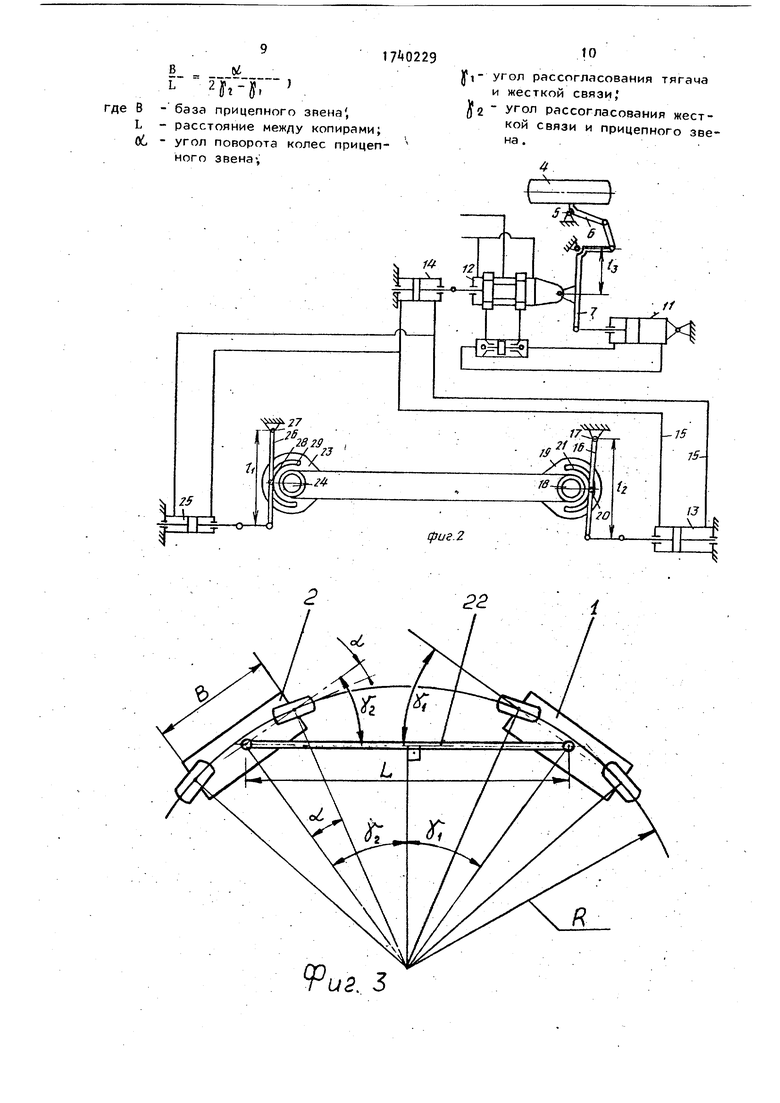
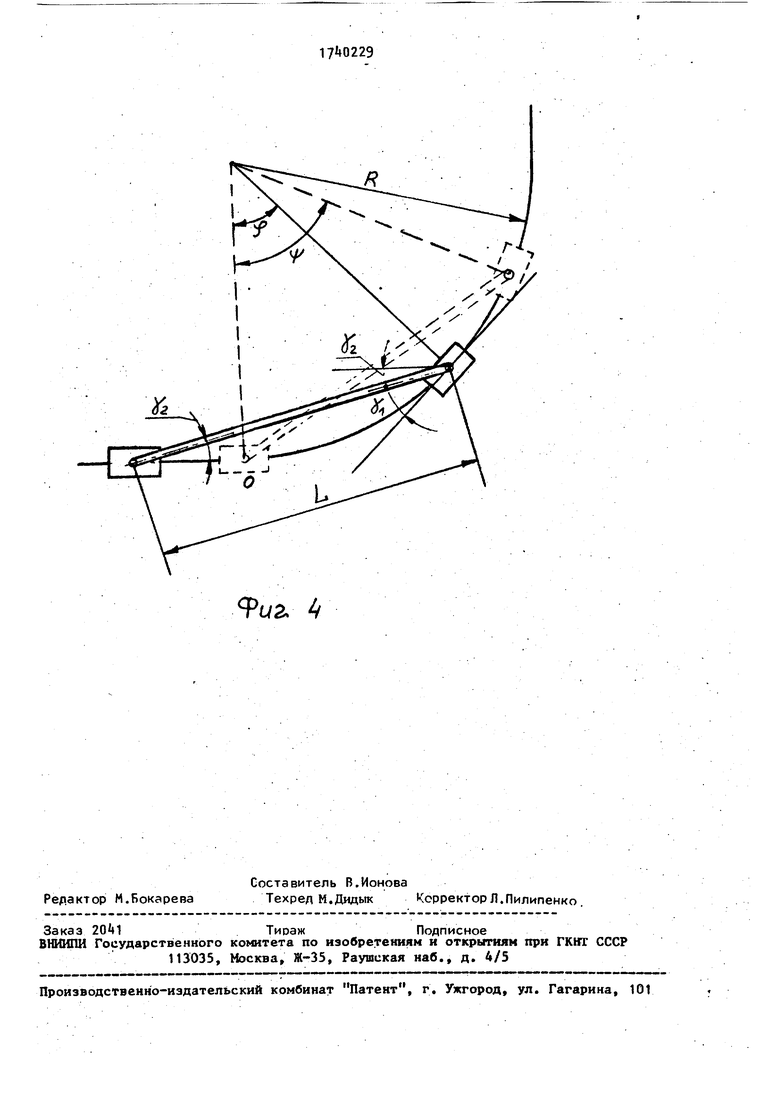
На фиг. 1 представлена принципиальная схема системы рулевого управления; на фиг. 2 - гидравлическая схема устройства} на фиг.З схема кругового движения; на фиг.4 - схема движения автопоезда при входе в поворот.
Система рулевого управления автопоезда, состоящего из тягача 1 и прицепного звена 2, связанных между собой шарнирно опирающейся на них промежуточной рамой 3, устроена следующим образом: колеса k прицепного звена 2, поворачивающиеся на шкворнях 5 соединены трапециями, состоящими из рычагов 6 и 7, шарнирно связанных тягами 8 и 9. Силовая кинематическая связь между колесами разных осей прицепного звена 2 осуществляется тягами 1 0 . WTOK силового гидроцилиндра 11, закрепленного на прицепном звене 2, соединен с рычагом 7. Управляющим элементом гидроцилиндра 11 служит распределительный золотник 12, который шарнирно закреплен на рычаге 7.
Управление золотником 12 обеспечивается при помощи дистанционного привода, состоящего из задающего 13 и исполнительного 14 гидроцилиндров, соединенных между собой трубопроводами 15. Источником энергии для работы силового гидроцилиндра 11 служит гидронасос, связанный с ним известной гидросхемой (не показана). Задающий гидроцилиндр 13 приводится в действие рычагом 16, качающимся на оси 17. Рычаг 16 приводится в действие
установленным на оси 18 опорно-седельного устройства прицепного звена 2 копиром 19 посредством ролика 20, перемещающегося в пазу 21 копира 19. Копир 19 соединен жесткой связью 2/.
с аналогичным дополнительным копиром 23, установленным на оси 24 опорно- сцепного устройства тягача 1. На тягаче 1 установлен дополнительный корректирующий гидроцилиндр 25, приводимый в действие рычагом 26, качающимся на оси 27, который, в свою очередь, приводится в действие от дополнительного копира 23 через ролик 28, перемещающийся в пазу 23 дополнительного копира 23. Дополнительный корректирующий гидроцилиндр 25 своими полостями непосредственно соединен с полостями задающего 13 и исполнительного 14 гидроцилиндров.
517
Система рулевого управления коле- сами прицепного звена работает следующим образом.
При криволинейном движении автопоезда возникают углы рассогласования ftf - между тягачом 1 и жесткой связью 22, У, - между жесткой связью 22 и прицепным звеном 2. За счет жесткой связи 22 обеспечивается поворот копиров 23 и 19 соответственно
на углы iff и К ч Ролики 28 и 20, перемещаясь по пазам 29 и 21 копиров 23 и1Я через рычаги 26 и 16, перемещают штоки задающего 13 и дополнительного корректирующего25 гидроиилинд- ров,гидравлически соединенных своими полостями посредством трубопроводов 15 с полостями исполнительного гидроцилиндра 1.Шток исполнительного гид роцилиндра 1, перемещаясь,открывает золотник 12 .От гидронасоса рабочая жидкость поступает под давлением, к силовому гидроцилиндру 11 , который через систему рычагов 6, 7 и Ј , Э поворачивает колеса k прииепкогозвена 2 на угол , при котором золотник 12 устанавливается в исходное положение.
Дополнительый корректирующий гид- роцилинДр 25 имеет удельный объем вдвое меньший удельного объема задающего гидроцилиндра 13. За счет этого на переходных участках кривых (при входе и выходе автопоезда из поворота) изменение объема дополнительного гидроцилиндра 25 корректирует изменение объема задающего гидроцилиндра 13 так, что уменьшаются предельные отклонения траекторий звеньев автопоезда.
При формировании угла поворота колеса прицепного звена 2 в Функции одного угла рассогласования у2жест кой связи 22 и прицепного звена 2, угол поворота колес прицепного звена 2 из условия совпадения траекторий тягача 1 и прицепного звена 2 при круговом движении (см.фиг.2) можно определить Формулой
L If 2
(1)
При формировании угла поворота колес Oi прицепного звена 2 в функции углов рассогласования у, - тягача 1 и жесткой связи 2, У2 - жесткой гчя- зи 22 и прицепного звена 2 угол Ж выражается соотношением
Oi 2(K,f, + K2jf2).
(2)
5
Коэффициенты К и Kj находят, исходя из следующих условий: при круговом движении траектории звеньев авто поезда должны совпадать, на переход ных участках кривых (с момента входа в поворот тягача до момента входа в
поворот прицепного звена) среднее значение угла поворота прицепного звена должно быть равно среднему значению угла поворота колес тягача на соответствующем участке пути. При круговом движении (см.Фиг.3)
f JfzС учетом выражений
лучаем
(и (l) и (2) поlb i (K. + KfJ1) з
20
Kf +
К2
1
На переходном участке кривой (с момента входа в поворот тягача до момента входа в поворот прицепного 5 звена) среднее значение угла поворота колес прицепного звена должно быть равно нулю
V P-(J J Е( )dV-°
СР V
и
Подставляя
1 4 -Ь
R L 2 ;
получим V
V
J(KZ- K,)Jzd43+ J KtCfd(f О
1 кг-к. 2 + I К, °
5
( )R 6L
/
9
После подстановки
+ 4е 2
Y-S
V
О
получим
кг +
21
О
W
Аналогично доказывается справедливость зависимости (k) для случая выхода автопоезда из поворота.
Решая совместно уравнения (3) и (k), получаем
К, -1 К2 2
Таким образом, подставляя значения коэффициентов К и К в уравнение (2) получаем зависимость
d-f ГгР,
(5)
которая выражает взаимное соотношение конструктивных параметров автопоезда и углов рассогласования тягача, жесткой связи и прицепного
звена.
При соблюдении равенства объема жидкости, вытесняемой исполнительным гидроцилиндром 11 разности объемов жидкости, вытесняемой задающим 10 и дополнительным корректирующим 25 гидроцилиндрами, справедлива зависимость
,-5 Ifi U Si- K,.1,S,, 6 1, - длина рычага 26; 1 j- длина рычага 16} длина рычага 7 рабочая площадь поршня исполнительного гидроцилинд- ра Hi;1
рабочая площадь поршня задающего гидроцилиндра 13; рабочая площадь поршня дополнительного гидроцилинд- ра 25.
ешая совместно уравнений (5) и получаем
h:
с ..
s, ж 1г1§Ј
1. S
1 °1
(7)
,где
Ъ
S,
S.
ч
Si
удельные объемы исполнительного задающего и дополнительного корректирующего гидроцилиндров.
Таким образом, удельный объем дополнительного гидроцилиндра должен быть вдвое меньше удельного объема задающего гидроцилиндра.
Зависимость (7) позволяет достаточно просто подбирать конструктивные параметры системырулевого управления, необходимые для обеспечения требуемого закона изменения угла поворота колес прицепного звена, при наименьшем предельном отклонении траекторий. Управление поворотом колес прицепного звена автопоезда в функции разг ности углов рассогласования jj1, - тягача и жесткой связи, жесткой связи и прицепного звена на основе зависимости (5) позволяет осуществлять управление поворотом колес при переменном передаточном отношении V ;
«
v - ,-) Var, в отличие от упИравления при постоянном передаточtf В ном отношении V з- т выбирэеUE L мом из условия кругового движения, и
тем самым уменьшить предельные отклонения траектории прицепного звена от траектории тягача при криволинейном движении автопоезда.
Формула изобретения
5
0
5
0
1. Система рулевого управления колесами прицепного звена автопоезда, состоящего из тягача и прицепного
звена, связанных между собой шарнир- но опирающейся на них промежуточной рамой, содержащая рулевые трапеции прицепного звена, связанные с поворотными колесами, качающийся рычаг, кинематически связанный с копиром и со штоком задающего гидроцилиндра, гидравлически соединенного своими полостями посредством гидролиний с полостями исполнительного гидроцилиндра, шток которого кинематически связан через золотниковый гидро- распределитель с силовым гидроцилиндром, механически связанным посредством тяг с одной из упомянутых трапеций, и дополнительный гидроцилиндр на тягаче, связанный своими полостями непосредственно с полостя5 ми. непосредственно задающего и исполнительного гидроцилиндров прицепного звена, отличающаяся тем, что, с целью улучшения управляемости путем уменьшения предельного откло0 нения траекторий звеньев автопоезда от заданного значения, она снабжена закрепленным на тягаче дополнительным копиром, соединенным с копиром прицепного звена жесткой связью, и
5 дополнительным качающимся рычагом, соединенным кинематически с дополнительным копиром и со штоком дополнительного гидроцилиндра, при этом удельный объем дополнительного гид0,роцилиндра выполнен вдвое меньшим удельного объема задающего гидроци- линдра.
2. Система поп.1,отличаю- щ а я с я тем, что расстояние между копирами и база прицепного звена находятся между собой в следующем соотношении:
91740229
В 6i
Г FT В - база прицепного звена ,
L - расстояние между копирами; QL - угол поворота колес прицеп- ного звена;
.27
1
г
25
10
угол рассогласования тягача
и жесткой связи; УОЛ рассогласования жесткой связи и прицепного звена .
| название | год | авторы | номер документа |
|---|---|---|---|
| Система рулевого управления колесами прицепного звена автопоезда | 1990 |
|
SU1794781A2 |
| Система рулевого управления многозвенного большегрузного седельного автопоезда | 1988 |
|
SU1664643A1 |
| Система рулевого управления колесами прицепного звена автопоезда | 1990 |
|
SU1794782A2 |
| Система рулевого управления автопоезда | 1987 |
|
SU1474016A1 |
| Система для управления колесами прицепного звена автопоезда | 1990 |
|
SU1761576A1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСАМИ ПРИЦЕПНОГО ЗВЕНА АВТОПОЕЗДА | 1991 |
|
RU2033361C1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ БОЛЬШЕГРУЗНОГО СЕДЕЛЬНОГО АВТОПОЕЗДА | 2006 |
|
RU2312034C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2613132C2 |
| Устройство для управления колесамиполуприцепа | 1970 |
|
SU509485A1 |
| Система рулевого управления автопоезда | 1983 |
|
SU1131738A1 |
Изобретение относится к системе рулевого управления многозвенного автопоезда, состоящего из тягача и прицепного звена, связанных между собой шарнирно опирающейся на них промежуточной рамой. Целью изобретения является улучшение управляв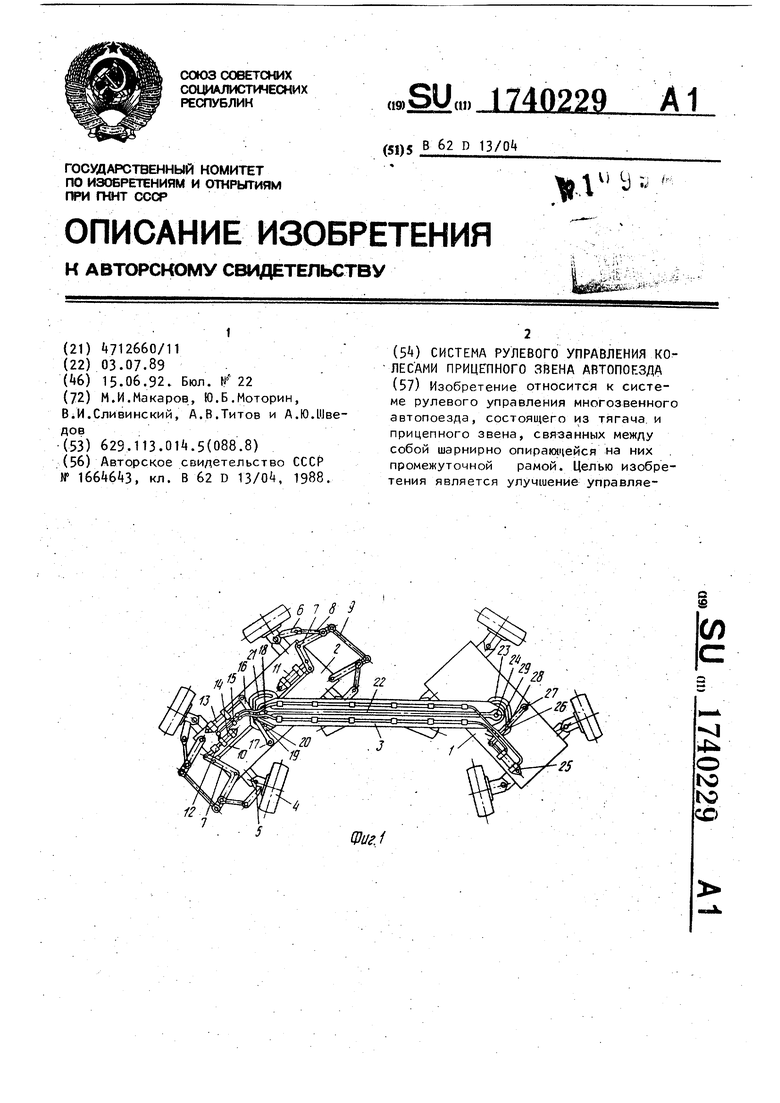
9V3
Фиг. г
| Авторское свидетельство СССР № , кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
| ( СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСАМИ ПРИЦЕПНОГО ЗВЕНА АВТОПОЕЗДА | |||
