Изобретение относится к области подводной навигации и предназначена для определения координат местоположения подводного объекта, в частности подводных аппаратов, оборудованных навигационной гидроакустической аппаратурой.
Известны гидроакустические системы подводной навигации, включающие навигационную базу из множества гидроакустических приемоответчиков и размещенного на подводном объекте навигации гидроакустического приемопередатчика, взаимодействующего с гидроакустическими приемоответчиками для определения координат местоположения подводного объекта навигации по известным алгоритмам [патент РФ 2365939 опубл. 27.08.2009].
Известно техническое решение, когда в состав навигационной базы входят гидроакустические приемоответчики, установленные на дне, т.е. выполненные в виде донных маяков, и по крайней мере один гидроакустический приемоответчик, установленный на водной поверхности, т.е. выполненный в виде плавучего маяка [патент РФ 2371738, опубл. 27.10.2009]. В другом подобном техническом решении вся навигационная база состоит из плавучих маяков [патент РФ 2365939, опубл. 27.08.2009].
Вышеуказанный плавучий маяк дополнительно включает в себя приемник внешней навигационной системы, в частности спутниковой системы GPS, за счет чего такой плавучий маяк может постоянно определять координаты своего местоположения в режиме реального времени и передавать гидроакустический сигнал, включающий информацию о своих координатах, как на донные маяки для дальнейшего определения координат местоположения каждого из них, так и на гидроакустический приемопередатчик подводного объекта навигации непосредственно, в частности для определения координат местоположения подводного объекта в пассивном режиме.
В пассивном режиме работы этой известной системы для определения координат подводного объекта могут использоваться периодические гидроакустические сигналы с высокой точностью синхронизации по крайней мере от трех-четырех плавучих маяков навигационной базы с последующим приемом таких сигналов гидроакустическим приемником подводного объекта и решением триангуляционной задачи по определению как относительных, так и абсолютных координат местоположения этого объекта.
Известна система определения координат подводных объектов [патент РФ №2437114, дата публикации 20.12.2011], содержащая подводный объект, плавучий маяк в количестве не менее трех, расположенные на поверхности моря, и станцию контроля, предназначенную для определения координат подводного объекта, причем маяки снабжены радионавигационным приемником GPS, приемный тракт с приемной гидроакустической антенной, которая расположена вблизи водной поверхности. Эта система является наиболее близким аналогом предлагаемого изобретения.
Заявленная система выполнена по классической технологии использования системы GPS для подводных работ, так называемой GIB-технологии, в которой используется принцип определения координат подводного объекта относительно нескольких надводных плавающих буев Global Intelligent Buoy (GIB), местоположение которых в свою очередь определяется с помощью системы глобального позиционирования GPS или ГЛОНАСС.
Несмотря на очевидные преимущества вышеописанной гидроакустической системы навигации с использованием плавучих маяков, такие как простота установки и обслуживания, в то же время при необходимости иметь координаты на подводном объекте необходимо иметь дополнительную гидроакустическую систему передачи информации на подводный объект.
Технический результат предлагаемого изобретения заключается в повышении оперативности и точности определения координат на подводном объекте.
Для обеспечения заявленного технического результата в гидроакустическую систему подводной навигации, содержащую по крайней мере три плавучих маяка, каждый из которых содержит приемник космической навигационной системы ГЛОНАСС/GPS, гидроакустический приемный тракт, соединенный с первой гидроакустической антенной, расположенной в непосредственной близости от соответствующего плавучего маяка, и гидроакустический преобразователь на подводном объекте, введены новые признаки, а именно: каждый плавучий маяк снабжен второй гидроакустической антенной, выполненной излучающей и удаленной от соответствующего плавучего маяка по вертикали, при этом первая гидроакустическая антенна и гидроакустический преобразователь подводного объекта выполнены приемоизлучающими, при этом каждый плавучий маяк снабжен передатчиком, соединенным с гидроакустическими антеннами через переключатель, позволяющий организовать режим приема-передачи или передачи.
Поясним заявленный технический результат.
Организация дополнительного тракта передачи через вторую антенну на каждом из плавучих маяков предназначена для передачи координат плавучего маяка на подводный объект с целью определения его координат, что позволяет исключить станцию контроля. При этом использование одной гидроакустической антенны для передачи данной информации и проведения навигационных измерений не может обеспечить высокую точность определения координат подводного объекта в связи с тем, что, чем ближе данная антенна находится к навигационному приемнику, тем точнее навигационные измерения между маяком и подводным аппаратом, но хуже гидроакустическая связь из-за гидрологии верхнего слоя воды. Чем ниже опущена гидроакустическая антенна, тем устойчивее и больше дистанция гидроакустической связи, но из-за неучитываемого движения гидроакустической антенны относительно навигационного маяка, возникающего под действием течений, ниже точность определения координат подводного аппарата.
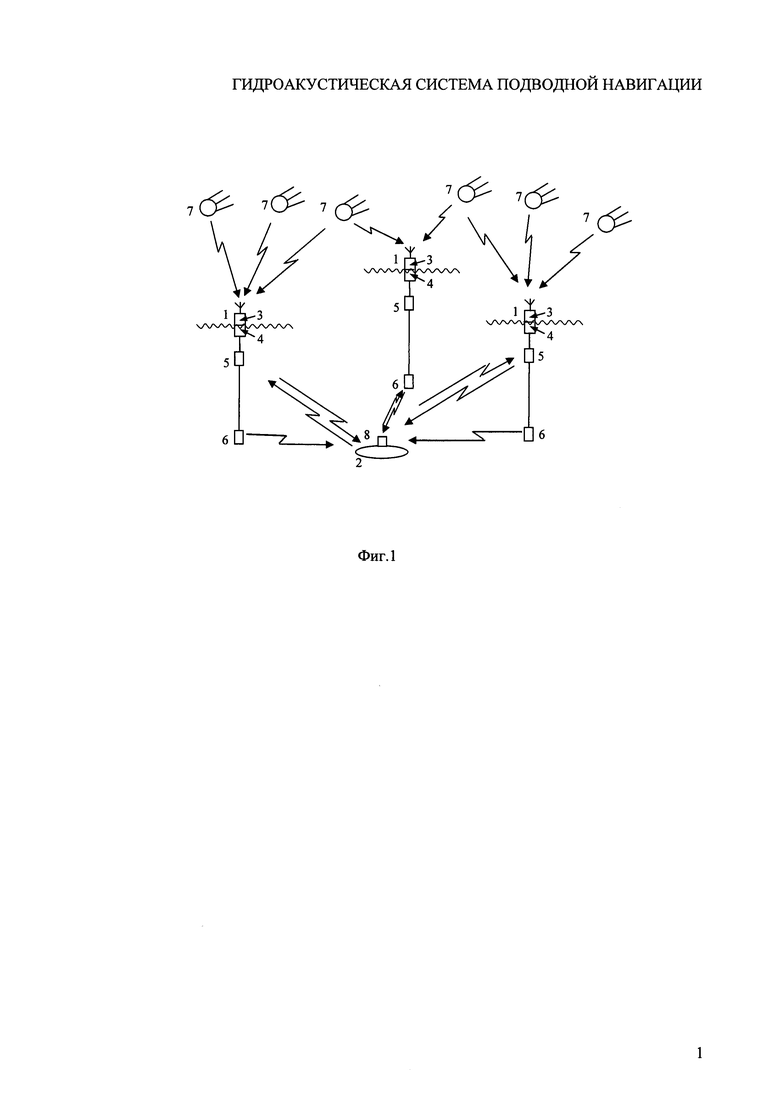
Сущность изобретения поясняется фиг. 1.
Предлагаемая гидроакустическая система подводной навигации (фиг. 1) для подводных аппаратов включает навигационную базу из множества плавучих маяков 1 (данном примере 3) и подводного аппарата 2. Каждый из плавучих маяков 1 содержит приемник 3 космической навигационной системы ГЛОНАСС/GPS 7, гидроакустический передатчик 4. Приемник 3 установлен над поверхностью воды для определения координат своего местоположения в режиме реального времени.
Передатчик 4 соединен с антеннами 5 и 6 через переключатель (на фиг. 1 не обозначен). Преобразователь 8, установленный на подводном объекте, выполнен приемоизлучающим.
Гидроакустические антенны, аппаратные блоки плавучих маяков и подводного объекта известны из литературы [В.И. Бородин и др. Гидроакустические навигационные средства. Ленинград. Судостроение. 1983 г.].
Предложенная гидроакустическая система подводной навигации работает следующим образом.
Приемники 3 космической навигационной системы ГЛОНАСС/GPS 7 определяют координаты плавучих маяков 1. Гидроакустические передатчики 4 в режиме передачи предают координаты навигационных маяков 1 через свои гидроакустические антенны 6 на преобразователь 8 подводного объекта 2. В режиме обеспечения режима приема - передачи производится измерение навигационных параметров между антенной 5 и преобразователем 8.
В результате реализации предложенного изобретения на подводном объекте получены координаты всех плавучих маяков и навигационные измерения, позволяющие определить координаты подводного объекта оперативно и с высокой точностью на борту подводного объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОГРАФИЧЕСКИХ КООРДИНАТ ПОДВОДНОГО ОБЪЕКТА | 2019 |
|
RU2717578C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ И КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА | 2014 |
|
RU2561012C1 |
| СПОСОБ НАВИГАЦИИ И ДИНАМИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ СУДНА | 2016 |
|
RU2642147C2 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2004 |
|
RU2303275C2 |
Изобретение относится к области подводной навигации и предназначено для определения координат местоположения подводного объекта, в частности подводных аппаратов, оборудованных навигационной гидроакустической аппаратурой. Технический результат предлагаемого изобретения заключается в повышении оперативности и точности определения координат на подводном объекте. Для обеспечения заявленного технического результата в гидроакустической системе подводной навигации, содержащей по крайней мере три плавучих маяка, каждый из которых содержит приемник космической навигационной системы ГЛОНАСС/GPS, гидроакустический приемный тракт, соединенный с первой гидроакустической антенной, расположенной в непосредственной близости от соответствующего плавучего маяка, и гидроакустический преобразователь на подводном объекте, каждый плавучий маяк снабжен второй гидроакустической антенной, выполненной излучающей и удаленной от соответствующего плавучего маяка по вертикали, при этом первая гидроакустическая антенна и гидроакустический преобразователь подводного объекта выполнены приемоизлучающими, при этом каждый плавучий маяк снабжен передатчиком, соединенным с гидроакустическими антеннами через переключатель, позволяющий организовать режим приема-передачи или передачи. 1 ил.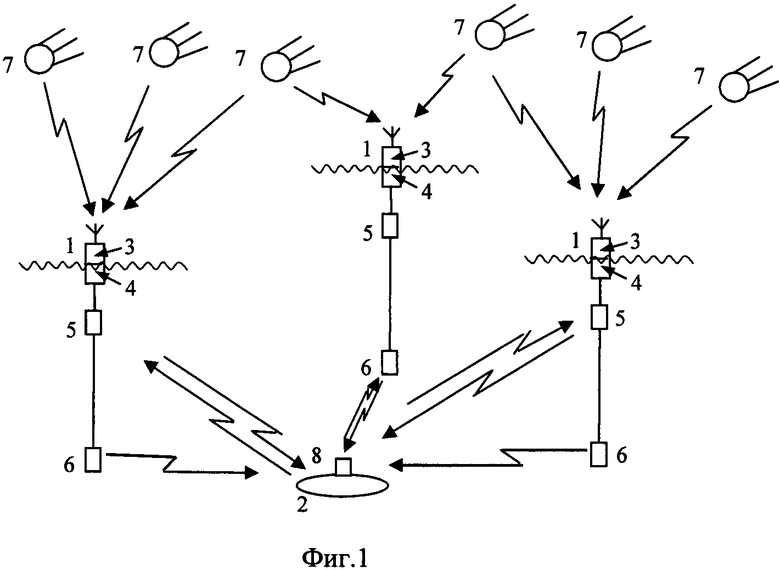
Гидроакустическая система подводной навигации, содержащая по крайней мере три плавучих маяка, каждый из которых содержит приемник космической навигационной системы ГЛОНАСС/GPS, гидроакустический приемный тракт, соединенный с первой гидроакустической антенной, расположенной в непосредственной близости от соответствующего плавучего маяка, и гидроакустический преобразователь на подводном объекте, отличающаяся тем, что каждый плавучий маяк снабжен второй гидроакустической антенной, выполненной излучающей и удаленной от соответствующего плавучего маяка по вертикали, при этом первая гидроакустическая антенна и гидроакустический преобразователь подводного объекта выполнены приемоизлучающими, при этом каждый плавучий маяк снабжен передатчиком, соединенным с гидроакустическими антеннами через переключатель, позволяющий организовать режим приема-передачи или передачи.
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2010 |
|
RU2437114C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2004 |
|
RU2303275C2 |
| US6501704 B2, 31.12.2002 | |||
| US20080008045 A1, 10.01.2008 | |||
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |

