Изобретение относится к измерительной технике и может быть использовано при измерении отклонений округлости формы крупногабаритных тел вращения, главным образом сечений, например, шпангоутов, корпусов, цилиндрических или конических вставок судов и подводных лодок.
Известны способы (аналоги) измерения отклонений от круговой формы сечений корпусов подводных лодок с использованием радиусометрического и координатного принципов [1]. Радиусометрический способ заключается в измерении радиус-векторов точек внутренней поверхности оболочки. Измерения проводятся в плоскости контролируемого сечения (шпангоута) от заданного центра. Полученные в результате измерения данные пересчитываются к базе отсчета отклонений.
Используемый в настоящее время в судостроении радиусометрический способ предусматривает:
- натяжение струны (металлической проволоки) между центрами торцов оболочки и фиксацию, таким образом, ее центральной оси;
- измерение радиус-векторов размеченных на контуре точек от центральной оси длинномерным ручным инструментом (штихмасом или рулеткой с натяжным устройством).
Координатный способ измерений отклонений от круговой формы оболочек, принятый за прототип, основан на использовании современных лазерных средств 3D-измерения, среди которых наиболее востребованными являются тахеометр и трекер.
Применение лазерного тахеометра или трекера предусматривает измерение расстояния до контрольной точки объекта (длины радиуса-вектора точки) лазерным дальномером и углов, образуемых проекциями радиуса-вектора с координатными осями прибора по горизонтальному и вертикальному лимбам. В этом способе используют маркированные на поверхности корпуса контрольные точки в плоскостях выбранных контролируемых сечений, например шпангоутов, внутри корпуса размещают лазерный геодезический прибор, настроив его в системе координат корпуса, затем последовательно во всех контролируемых сечениях измеряют координаты контрольных точек. С целью обеспечения требуемой точности в контрольных точках устанавливают специальные отражатели.
Недостатком указанных способов-аналогов является невозможность определения координат точек разметки, скрытых стенками элементов насыщения, приваренных к внутренней поверхности обшивки оболочки (фундаментов, камер, цистерн и др.).
Задачей предлагаемого изобретения является создание способа определения координат полного штатного комплекта размеченных контрольных точек, включая скрытые, для последующего достоверного расчета отклонений корпуса от круговой формы во всех контролируемых сечениях и, соответственно, зависящих от них прочностных характеристик корпусных конструкций. Для этого используется возможность расположения средств измерений как внутри, так и снаружи корпуса.
Указанный технический результат достигается в способе измерения формы корпусов подводных лодок, при котором используют маркированные на внутренней поверхности корпуса контрольные точки в плоскостях выбранных контролируемых сечений, например шпангоутов, устанавливая на них отражатели, внутри корпуса размещают лазерный геодезический прибор, настроив его в системе координат корпуса, затем последовательно во всех контролируемых сечениях измеряют координаты контрольных точек.
Однако в отличие от прототипа в заявленном способе заранее выбранные измеренные контрольные точки переносят на наружную поверхность корпуса. Для этого последовательно устанавливают напротив каждой выбранной точки гаммадефектоскоп и, закрепив с наружной стороны на противолежащем участке корпуса рентгеновскую пленку размером не менее 70×70 мм, просвечивают ее через корпус, а проявившийся след внутренней точки маркируют снаружи корпуса. Затем, установив снаружи корпуса лазерный геодезический прибор, настраивают его в системе координат корпуса по вынесенным контрольным точкам и измеряют на наружной поверхности корпуса координаты точек, противолежащих точкам, скрытым насыщением, после чего пересчитывают их внутренние координаты по формулам:

где Δ - толщина корпуса;
X2, Y2, Z2 - координаты наружной точки;
X1, Y1, Z1 - координаты противолежащей точки на внутренней поверхности,
Затем по результатам данных измерений, накопленных компьютером, определяют отклонения от круговой формы контролируемого сечения корпуса подводной лодки.
В частном случае маркировку контрольных точек выполняют с помощью механического кернения.
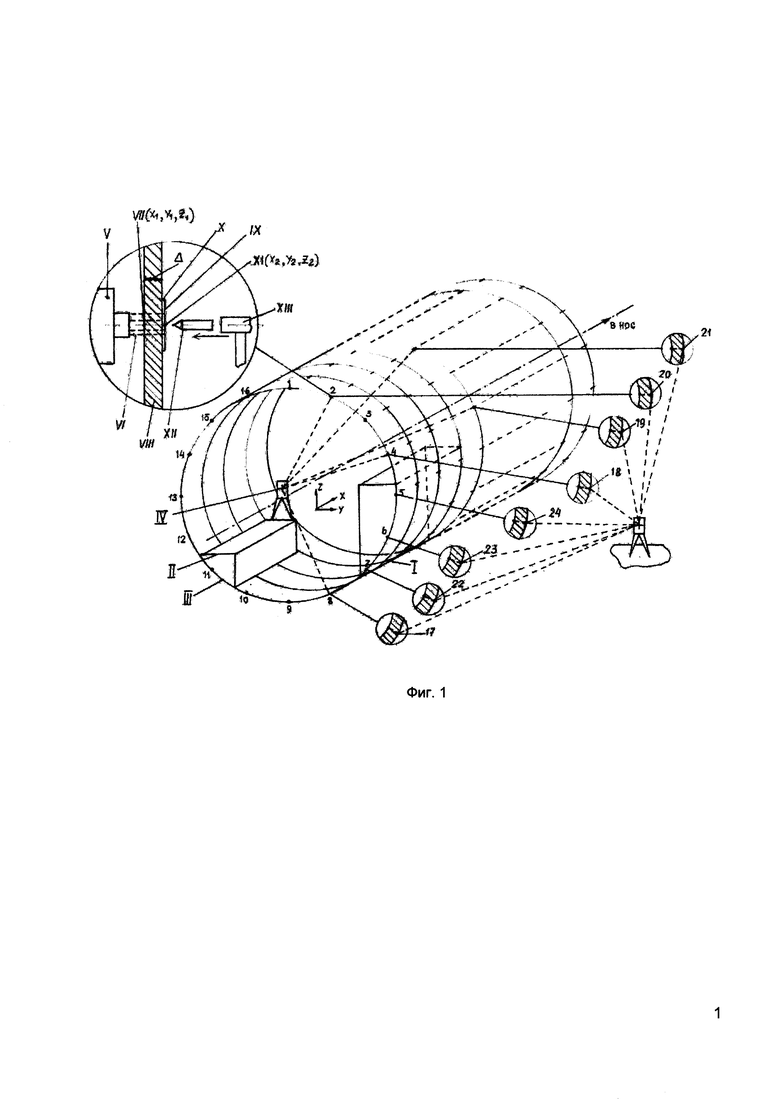
Предлагаемый способ поясняется фиг. 1, на которой показаны контуры сечений цилиндрической корпусной конструкции с разметкой контрольных точек и схемой их измерений, где обозначены следующие позиции: 1÷16 - контрольные точки, соответствующие штатной разметке кернением шпангоутов основного корпуса подводной лодки, где 5, 6, 7, 11 - точки, скрытые насыщением; 17÷21 - вынесенные наружные точки, противолежащие внутренним измеренным; 22÷24 - точки штатной разметки, измеренные снаружи, противолежащие скрытым внутренним точкам; I - основной корпус подводной лодки; II - объект внутреннего насыщения; III - шпангоут основного корпуса; IV - средство измерения; V - гаммадефектоскоп; VI - пучок гаммаизлучения; VII - внутренняя точка, обозначенная кернением; VIII - обшивка; IX - рентгеновская пленка; X - контур рентгеновской пленки; XI - проявленный след керненной внутренней точки; XII - кернер; XIII - ударный инструмент.
Предлагаемый способ осуществляется следующим образом на примере технологии процесса измерений отклонений круговой формы корпуса подводной лодки.
Корпус подводной лодки формируется из секций, при изготовлении которых обязательно производится внутри корпуса маркировка контрольных точек в плоскостях шпангоутов методом кернения. После завершения плановых работ по установке внутри секции подводной лодки штатных элементов насыщения (выгородок, переборок, палуб, настилов и других конструктивных образований) перед гидравлическими испытаниями обязательно предусматриваются проверочные работы по определению отклонений сечений корпуса от круговой формы. Проверочные работы выполняются координатным способом с использованием в качестве измерительного инструмента тахеометра или трекера (IV). Операторы измерительной бригады устанавливают отражатели поочередно в каждую размеченную контрольную точку на внутренней поверхности оболочки, количество которых в каждом сечении может быть 16, 32 или 48. Отражатели устанавливаются также в размеченные базовые точки, определяющие положения основных плоскостей корабельной системы координат. Лазерный луч средства измерения визируется в режиме автоматического слежения на центр отражателя, и прибор определяет и записывает в базу данных трехмерные координаты соответствующей контрольной точки в системе координат прибора. При этом предусматривается перебазирование средства измерения с использованием ряда стоянок тахеометра (трекера) в обход конструкций насыщения (II), загромождающих прямую видимость точек разметки. Результаты измерений с различных стоянок увязываются в единую корабельную систему координат (X, Y, Z) с использованием предварительного создания внутри оболочки локальной геодезической сети с системой опорных элементов (отражателей), переставляемых в отмеченные кернением точки.
Затем средство измерения (IV) перебазируется на устойчивое основание снаружи корпуса секции подводной лодки с выполнением условия достаточного обзора участка наружной поверхности корпуса, за которым расположены скрытые насыщением контрольные точки сечений. При этом допускается использование нескольких разных стоянок средства измерения, объединенных в общей геодезической сети. Для создания фрагмента этой сети снаружи координаты ряда выбранных базовых и контрольных точек, измеренных изнутри, выносят на наружную поверхность корпуса с поправкой на толщину его обшивки по нормали по формулам:

где Δ - толщина обшивки;
X1, Y1, Z1 - координаты точки, измеренной изнутри;
X2, Y2, Z2 - координаты противолежащей точки на внешней поверхности.
Выбор выносимых точек производится при учете следующих условий: равномерное их распределение по периметру измерительного пространства; обеспечение с каждого наружного места установки средства измерения видимости минимум четырех вынесенных точек; расположение вынесенных точек на максимальном удалении от средства измерения; недопустимо располагать вынесенные точки на одной прямой. При этом вынос производят с помощью операции радиационного просвечивания, при которой гаммадефектоскоп (V) устанавливают напротив выбранной внутренней точки (VII), обозначенной кернением, а с наружной стороны на противолежащем участке металлической стенки, найденном по имеющейся корпусной разметке, закрепляют рентгеновскую пленку (IX) с размерами не менее 70×70 мм, контур (X) которой фиксируют на металлической поверхности. После завершения экспозиции просвечивания пленку снимают, проявляют и позиционируют на корпусе по фиксированному ранее контуру (X), и через проявившийся след накерненной внутренней точки (XI) производят кернение противолежащей точки на наружной поверхности инструментами (XII и XIII). После этого средство измерения, установленное снаружи корпуса подводной лодки, используют для измерения координат вынесенных контрольных и базовых точек, вводят его в единую корабельную систему координат, затем производят измерения координат противолежащих точек (22, 23, 24), найденных по имеющейся разметке снаружи корпуса, и с поправкой на толщину обшивки по нормали определяют координаты внутренних точек (5, 6, 7), скрытых насыщением, по формулам:

где Δ - толщина корпуса;
Х2, Y2, Z2 - координаты точки, измеренной снаружи;
X1, Y1, Z1 - координаты противолежащей точки на внутренней поверхности,
Определенные по описанному способу координаты полного штатного комплекта размеченных контрольных точек, включая скрытые, в каждом сечении используются для последующего достоверного расчета отклонений от круговой формы и зависящих от них прочностных характеристик корпусных конструкций подводных лодок.
Программа, по которой компьютер обрабатывает полученные данные, предусматривает следующие основные этапы: принятие за общую систему координат ту, которая соответствует выбранной базовой стоянке средств измерения; сведение результатов измерения со всех использованных стоянок в единую систему координат; построение по измеренным координатам базовых точек базовых плоскостей (диаметральной и монтажнобазовой); определение положения продольной оси корпуса подводной лодки путем геометрического пересечения базовых плоскостей; определение расстояния от каждой измеренной контрольной точки до продольной оси.
Источник информации
1. Гаврилюк Л.П. Обоснование выбора методики контроля отклонений от круговой формы корпусных конструкций. Судостроение. 2007. №2, с. 55÷58.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ ПРОЧНОГО КОРПУСА ПОДВОДНОЙ ЛОДКИ, ЗАКРЫТОГО КОНСТРУКЦИЯМИ ЛЕГКОГО КОРПУСА | 2016 |
|
RU2622230C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ СКРЫТЫХ КОНТРОЛЬНЫХ ТОЧЕК ПРИ ИЗМЕРЕНИИ ОТКЛОНЕНИЙ ОТ КРУГОВОЙ ФОРМЫ СЕЧЕНИЙ КОРПУСОВ ЦИЛИНДРИЧЕСКИХ ВСТАВОК СУДОВ ИЛИ ПОДВОДНЫХ ЛОДОК | 2014 |
|
RU2575593C2 |
| СПОСОБ ИЗМЕРЕНИЯ ОТКЛОНЕНИЙ ОТ КРУГЛОСТИ | 2002 |
|
RU2217694C1 |
| СПОСОБ ИЗМЕРЕНИЯ ОТКЛОНЕНИЙ ФОРМЫ ОБОЛОЧКИ ВРАЩЕНИЯ | 2003 |
|
RU2242707C1 |
| СПОСОБ ПРОИЗВОДСТВА КООРДИНАТНЫХ ИСПОЛНИТЕЛЬНЫХ СЪЕМОК | 2004 |
|
RU2267745C1 |
| СПОСОБ ДИСТАНЦИОННО-НЕКОНТАКТНОГО ОПРЕДЕЛЕНИЯ УРОВНЯ СРЕДЫ В РЕЗЕРВУАРЕ | 2001 |
|
RU2208768C2 |
| СПОСОБ ПРОКЛАДКИ МОРСКИХ ПОДВОДНЫХ КАБЕЛЕЙ | 2010 |
|
RU2444827C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ ОТКЛОНЕНИЯ НАРУЖНОГО КОНТУРА ДНИЩА РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО ОТ ГОРИЗОНТАЛИ | 2015 |
|
RU2590342C1 |
| Способ разметки теоретических линий набора и контурных линий секций корпуса судна | 1983 |
|
SU1123929A1 |
| Способ разметки деталей приварного насыщения на поверхности в помещении судна | 1990 |
|
SU1795282A1 |
Использование: для измерении отклонений округлости формы крупногабаритных тел вращения, главным образом сечений шпангоутов корпусов цилиндрических или конических вставок судов и подводных лодок. Сущность изобретения заключается в том, что используют маркированные с помощью кернения на внутренней поверхности корпуса контрольные точки в плоскостях выбранных контролируемых сечений шпангоутов, устанавливая на них отражатели, внутри корпуса размещают лазерный геодезический прибор, настроив его в системе координат корпуса, затем последовательно во всех контролируемых сечениях измеряют координаты контрольных точек и передают их на компьютер, который по результатам измерений определяет форму корпуса в контролируемых сечениях, при этом выбранные измеренные контрольные точки переносят на наружную поверхность корпуса, для чего устанавливают напротив выбранной точки гаммадефектоскоп и, закрепив с наружной стороны на противолежащем участке корпуса рентгеновскую пленку размером не менее 70×70 мм, просвечивают ее через корпус, а проявившийся след внутренней точки маркируют снаружи корпуса кернением, затем лазерный геодезический прибор, установленный снаружи, настраивают в системе координат корпуса по вынесенным контрольным точкам и с его помощью определяют на наружной поверхности координаты точек, противолежащих точкам, скрытым насыщением, после чего пересчитывают их внутренние координаты по определенным формулам, а затем по результатам данных измерений, накопленных компьютером, определяют отклонения от круговой формы контролируемого сечения корпуса подводной лодки. Технический результат: обеспечение возможности достоверного определения отклонений корпуса от круговой формы во всех контролируемых сечениях. 1 ил.
Способ измерения формы корпусов подводных лодок, при котором используют маркированные с помощью кернения на внутренней поверхности корпуса контрольные точки в плоскостях выбранных контролируемых сечений, например, шпангоутов, устанавливая на них отражатели, внутри корпуса размещают лазерный геодезический прибор, настроив его в системе координат корпуса, затем последовательно во всех контролируемых сечениях измеряют координаты контрольных точек и передают их на компьютер, который по результатам измерений определяет форму корпуса в контролируемых сечениях, отличающийся тем, что выбранные измеренные контрольные точки переносят на наружную поверхность корпуса, для чего устанавливают напротив выбранной точки гаммадефектоскоп и, закрепив с наружной стороны на противолежащем участке корпуса рентгеновскую пленку размером не менее 70×70 мм, просвечивают ее через корпус, а проявившийся след внутренней точки маркируют снаружи корпуса кернением, затем лазерный геодезический прибор, установленный снаружи, настраивают в системе координат корпуса по вынесенным контрольным точкам и с его помощью определяют на наружной поверхности координаты точек, противолежащих точкам, скрытым насыщением, после чего пересчитывают их внутренние координаты по формулам:
X1=X2;  ;
;  ,
,
где Δ - толщина корпуса;
X2, Y2, Z2 - координаты точки, измеренной снаружи;
X1, Y1, Z1 - координаты противолежащей скрытой точки на внутренней поверхности, а затем по результатам данных измерений, накопленных компьютером, определяют отклонения от круговой формы контролируемого сечения корпуса подводной лодки.
| US 5531407 A, 02.07.1996 | |||
| СПОСОБ КОНТРОЛЯ ФОРМЫ И ДИАМЕТРОВ ВНУТРЕННИХ СЕЧЕНИЙ КРУПНОГАБАРИТНЫХ ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ | 2000 |
|
RU2166729C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКОЙ ФОРМЫ ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ ТЕЛА ВРАЩЕНИЯ И ЕГО ПОВЕДЕНИЯ В ПРОЦЕССЕ ЭКСПЛУАТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2227268C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ФОРМЫ ПОВЕРХНОСТИ | 1987 |
|
SU1501677A1 |
| Способ контроля формы поверхности объекта | 1989 |
|
SU1633256A1 |
| US 4521968 A, 11.06.1985. | |||

