Область техники, к которой относится изобретение
Настоящее изобретение относится к усовершенствованиям машин для производства макаронных изделий. В частности, изобретение относится к усовершенствованиям машин для резки и образования складок для производства макаронных изделий в форме галстука-бабочки и т.п., которые получают посредством резки обрабатываемых макаронных изделий из непрерывного листа с последующим выполнением складок в центральной области для образования макаронных изделий в форме галстука-бабочки или бабочки.
Уровень техники
Машины для резки и образования складок этого типа, по существу, известны. Примеры этих машин описаны, например, в итальянских патентах 1265901 и 1334674.
Эти машины, в общем, содержат матрицу и пуансон, взаимодействующие друг с другом для резки макаронного теста. Матрица также скомбинирована со «складкообразующими узлами», взаимодействующими с матрицей для выполнения складок, по существу, в центральной области на отрезанных макаронных изделиях. Кроме того, с матрицей связана, по меньшей мере, одна выталкивающая гребенка для выталкивания отрезанных макаронных изделий со складками из матрицы. Различные элементы для резки, образования складок и выталкивания управляются центральным приводом с целью выполнения синхронных перемещений. Для синхронного управления пуансоном, складкообразующими узлами и выталкивающей гребенкой предусмотрены соответствующие кинематические механизмы. В частности, выталкивающая гребенка управляется с помощью кулачково-коромыслового механизма, в котором кулачок вращается с помощью электропривода, который регулирует перемещение пуансона и складкообразующих узлов, и коромысло удерживается в контакте с кулачком с помощью соответствующих пружин сжатия.
Существующие машины для резки и образования складок имеют весьма сложную конструкцию с точки зрения исполнительных механизмов выталкивающей гребенки.
Раскрытие изобретения
Настоящее изобретение относится к машине для резки и образования складок, которая полностью или частично устраняет один или несколько недостатков существующих машин.
Задача нескольких вариантов осуществления изобретения состоит в том, чтобы предложить машину с системой перемещения выталкивающей гребенки, которая является более эффективной по сравнению с обычными системами.
По существу, по изобретению предлагается, чтобы выталкивающая гребенка приводилась в действие посредством возвратно-поступательного движения с помощью вала, вращающегося вокруг собственной оси и совершающего возвратно-поступательное и вращающееся движение, управляемое, по меньшей мере, одним электродвигателем с электронным управлением и синхронизированное с перемещениями остальных подвижных частей машины. Электродвигатель, по существу, является бесщеточным электродвигателем. В особо преимущественных вариантах выполнения изобретения вал для приведения в действие управляется в процессе возвратно-поступательного и вращающегося движения с помощью двух отдельных электродвигателей с электронным управлением, предпочтительно, бесщеточных электродвигателей, установленных с противоположных концов вала. Таким образом, обеспечивается сбалансированная работа вала, и предотвращаются деформации кручения без необходимости завышения сечения вала.
Электродвигатель или электродвигатели могут быть поворотными электродвигателями или линейными электродвигателями. В первом случае движение будет возвратно-поступательным поворотным движением, в то время как во втором случае движение будет возвратно-поступательным прямолинейным движением. В обоих случаях электронное управление обеспечивает синхронизацию движений гребенки с движениями остальных подвижных частей машины. В случае линейных электродвигателей полезно предусмотреть линейные направляющие, например, расположенные на концах или в промежуточных местах в направлении подвижного элемента.
Использование электродвигателей отдельно от основного электропривода машины обеспечивает значительное упрощение всей конструкции машины и ее более эффективную и бесшумную работу.
Кроме того, электродвигатель или электродвигатели для приведения в действие выталкивающей гребенки могут быть отключены в положении, в котором выталкивающая гребенка остается бездействующей. Таким образом, машина может работать без использования выталкивающей гребенки. Это может быть полезным или даже необходимым в случае производства макаронных изделий нескольких типов. Оператор может настраивать выталкивающие гребенки, так чтобы они функционировали или оставались бездействующими, посредством простого управления на простом электронном интерфейсе, например, клавиатуре, кнопочной панели, сенсорной панели и т.п.
Кроме того, функционирование управляющего вала выталкивающей гребенки с помощью электродвигателей с электронным управлением позволяет настраивать ход выталкивающей гребенки по усмотрению, как функцию типа выпускаемых макаронных изделий.
Благодаря наличию электродвигателей в кинематической схеме для обеспечения функционирования с помощью главного электропривода также имеется возможность перемещения вручную выталкивающей гребенки, когда машина остановлена, например, для выполнения регулировки, технического обслуживания или операций управления.
Предпочтительно, электродвигатель или электродвигатели, которые приводят в действие выталкивающую гребенку, расположены таким образом, чтобы прикладывать уравновешивающее усилие для уменьшения инерционных деформаций механических элементов. В варианте выполнения это достигается с помощью двух отдельных электродвигателей, связанных с двумя противоположными концами вала или другого элемента, на котором установлены опорные плечи выталкивающей гребенки. Два электродвигателя управляются параллельно с высокой точностью для обеспечения скоординированных ограниченных по времени перемещений у двух концов вала или элемента и, таким образом, выталкивающей гребенки. Использование двух отдельных и параллельных электродвигателей обеспечивает уменьшение инерционных деформаций во время возвратно-поступательного движения механических частей. Кроме того, обеспечиваются особо высокие ускорения. Такая конфигурация также пригодна для приведения в действие гребенок значительной длины в машинах с большими поперечными размерами. Применительно к машинам с меньшими поперечными размерами также имеется возможность получения удовлетворительных результатов с одним электродвигателем. Предпочтительно, он будет устанавливаться на промежуточном участке, предпочтительно, приблизительно в центре продольного направления выталкивающей гребенки, т.е. поперечного продолжения машины. Таким образом, имеется возможность уменьшения деформаций кручения, вызванных инерцией на этапах ускорения и торможения выталкивающей гребенки и, в частности, вала или другого элемента, который перемещает плечи, на которых установлена выталкивающая гребенка.
Как ни удивительно, было установлено, что с этими компоновками для приведения в действие выталкивающей гребенки можно использовать отдельные электродвигатели, несмотря на очень жесткие допуски и высокие динамические напряжения, вызываемые скоростями и ускорениями механических элементов машины.
Использование одного или нескольких электродвигателей отдельно от центрального электропривода для приведения в действие выталкивающей гребенки позволяет обеспечить конкретные преимущества и решить проблемы, касающиеся машин для резки и образования складок. В частности, особо важной проблемой является модификация с высокой точностью взаимосвязи движения гребенки и движения остальных частей машины. В частности, имеется возможность модификации с высокой точностью положения гребенки как функции положения остальных частей (складкообразующих узлов) в каждый момент производственного цикла.
Другие преимущественные отличительные признаки и варианты осуществления изобретения описываются и определяются в приложенной формуле изобретения, которая образует неотъемлемую часть настоящего изобретения. Краткое описание, приведенное выше, определяет характеристики различных вариантов выполнения для облегчения понимания приведенного ниже подробного описания и усовершенствования существующего уровня техники. Разумеется, существуют другие отличительные признаки изобретения, которые будут описаны ниже и определены в приложенной формуле изобретения. Разумеется, что различные варианты осуществления изобретения не ограничиваются в заявке до деталей конструкции и компоновок компонентов, описанных в приведенном ниже описании или показанных на чертежах. Изобретение может быть внедрено в другие варианты осуществления и может применяться на практике другим образом. Кроме того, понятно, что используемые формулировки и терминология предназначены только для описательных целей и не должны рассматриваться как ограничивающие.
Специалистам в этой области понятно, что идея, на которой основано описание, может использоваться как основа для проектирования других конструкций, других способов и/или других систем для решения различных задач настоящего изобретения. Соответственно, важно, чтобы формула изобретения рассматривалась как включающая в себя те эквивалентные конструкции, которые не отклоняются от сущности и объема настоящего изобретения.
Краткое описание чертежей
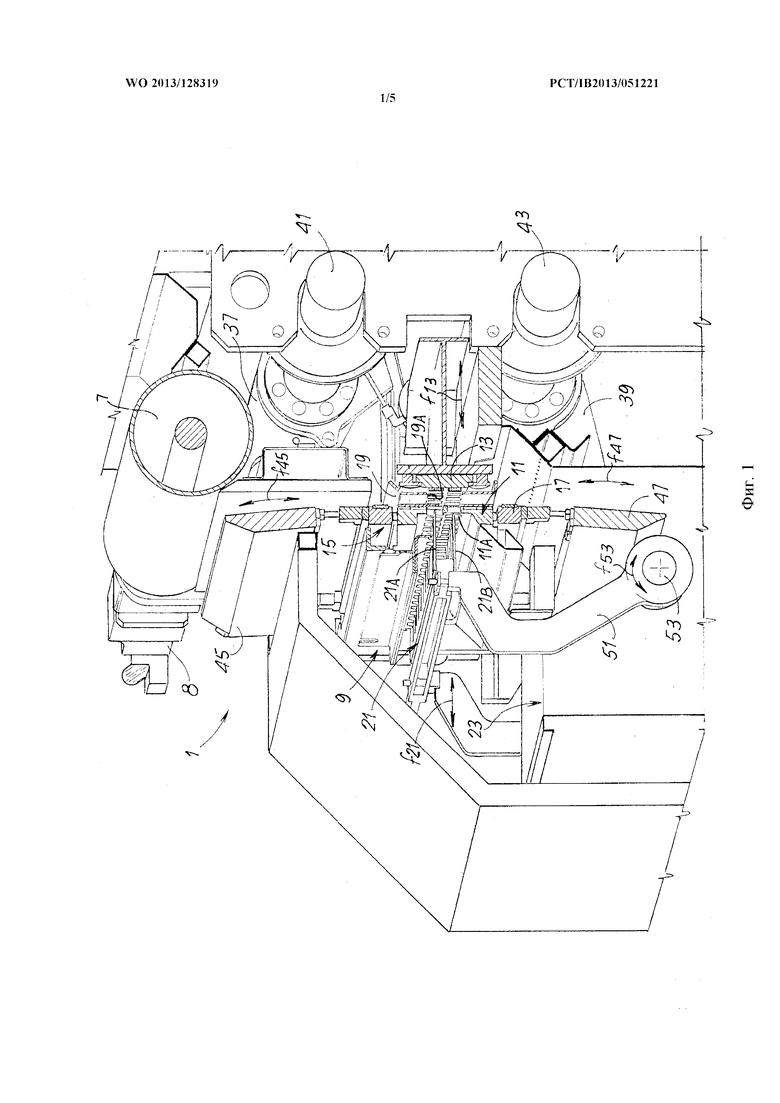
На фиг. 1 показано частичное аксонометрическое изображение в разрезе машины для резки и образования складок, в которую внедряется изобретение;
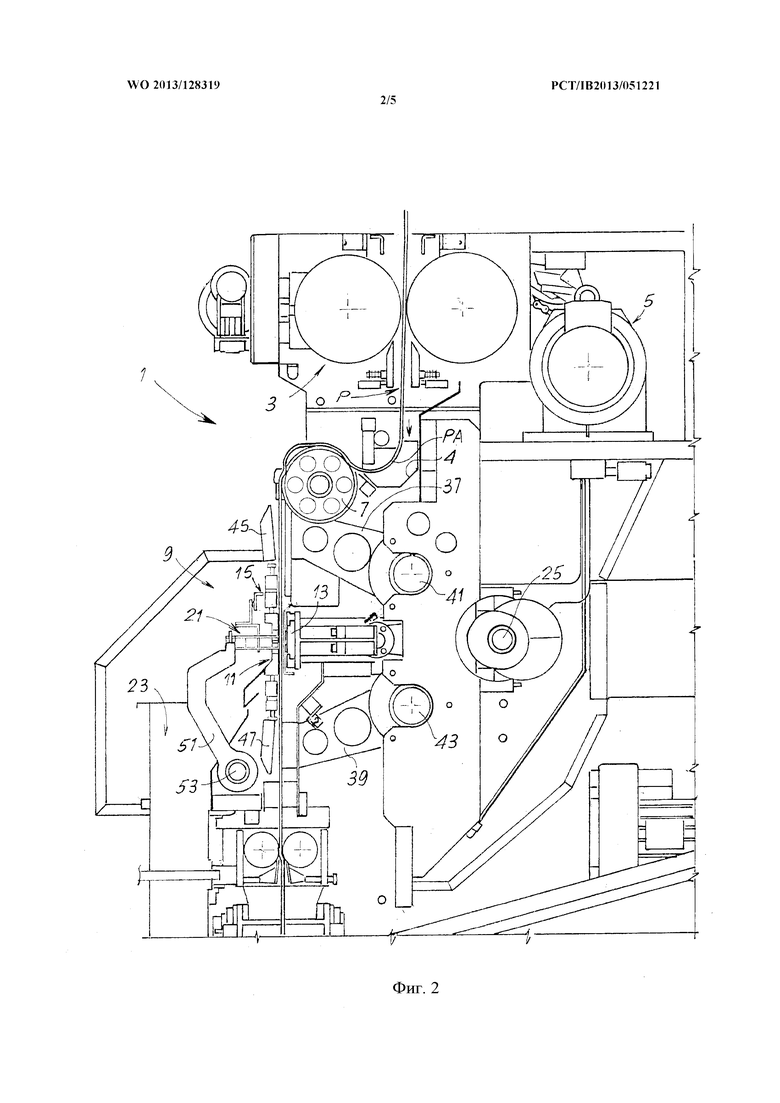
на фиг. 2 - схематичный вид в разрезе по вертикальной плоскости машины из фиг. 1;
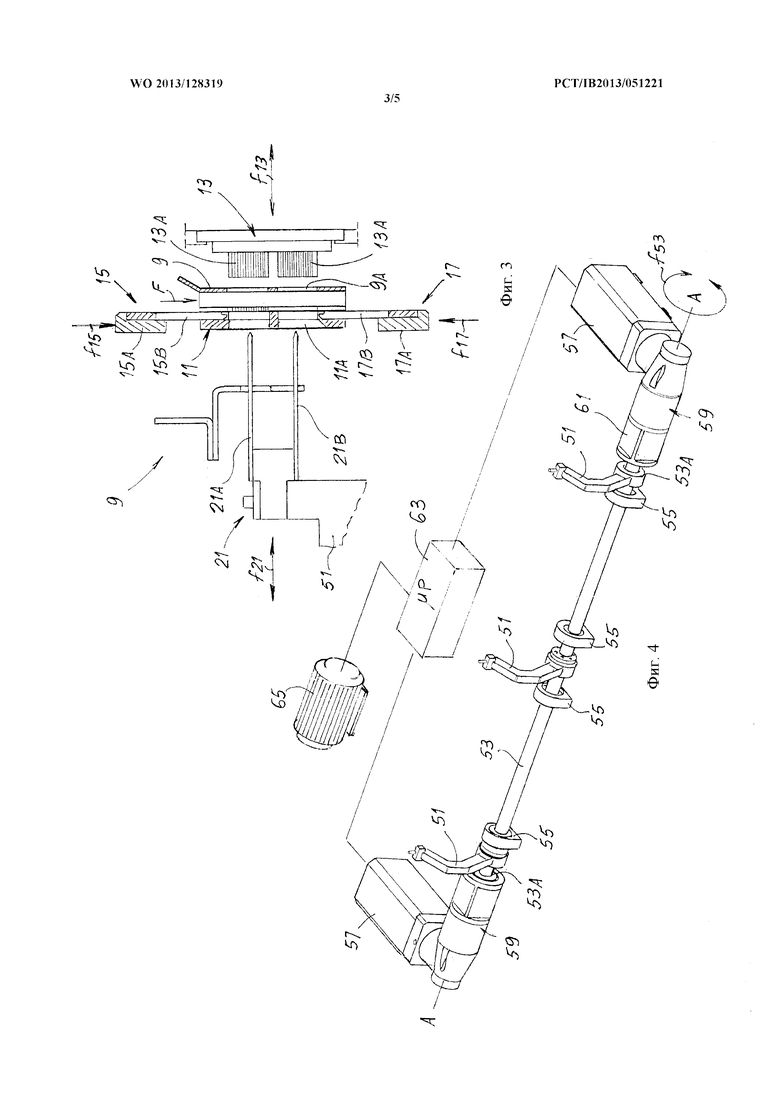
на фиг. 3 - схематичное изображение элементов для резки, образования складок и выталкивания макаронных изделий;
на фиг. 4 - аксонометрическое изображение исполнительного механизма выталкивающей гребенки;
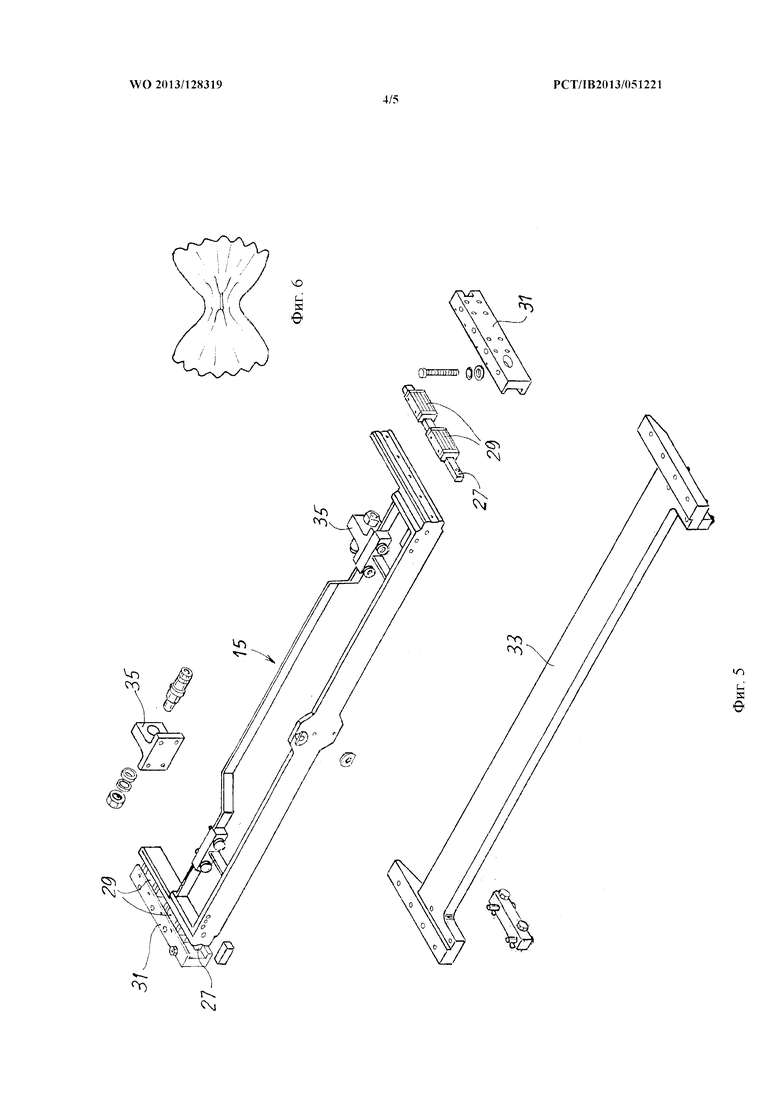
на фиг. 5 - изображение в разобранном виде ползуна для приведения в действие пуансона;
на фиг. 6 - тип макаронного изделия, которое может быть получено с помощью машины, показанной на предыдущих фигурах;
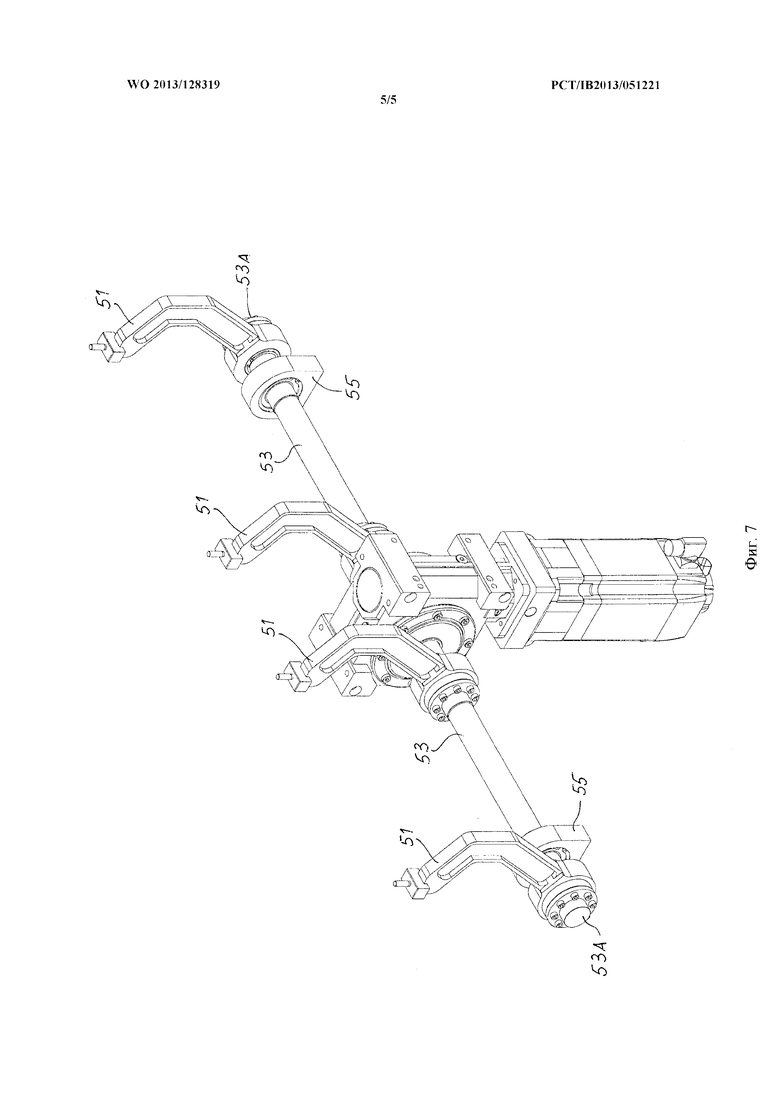
на фиг. 7 - аксонометрическое изображение, схожее с изображением из фиг. 4, выталкивающей гребенки, исполнительного вала и электродвигателя в модифицированном варианте выполнения.
Осуществление изобретения
Ниже приведено подробное описание примеров осуществления изобретения со ссылкой на приложенные чертежи. Одинаковые ссылочные номера на различных чертежах обозначают идентичные или схожие элементы. Кроме того, чертежи могут быть выполнены не в масштабе. Приведенное ниже описание не ограничивает изобретение. Объем изобретения определяется приложенной формулой изобретения.
Ссылка в описании на «какой-либо вариант осуществления изобретения» или «конкретный вариант осуществления изобретения» или «некоторые варианты осуществления изобретения» означает, что конкретная характеристика, конструкция или элемент, описанный применительно к варианту осуществления изобретения, включен, по меньшей мере, в один вариант выполнения описываемого предмета рассмотрения. Таким образом, выражение «в каком-либо варианте осуществления изобретения» или «в конкретном варианте осуществления изобретения» и «в некоторых вариантах осуществления изобретения» в различных местах всего описания необязательно относится к одному и тому же варианту осуществления изобретения или одним и тем же вариантам осуществления изобретения. Кром того, конкретные характеристики, конструкции или элементы могут комбинироваться любым образом в одном или нескольких вариантах осуществления изобретения.
На фиг. 1 и 2 показаны основные элементы машины для резки и образования складок, обозначенной в целом ссылочным номером 1. Машина для резки и образования складок содержит приводимый в действие двигателем 5 каландр 3, через который проходит непрерывный лист макаронного теста, обозначенный ссылочным символом Р. После каландра 3 по траектории следования макаронного теста Ρ установлен барабан 7 подачи, совершающий прерывистое вращательное движение для поэтапной подачи макаронного теста Ρ к узлу резки и образования складок, обозначенному в целом ссылочным номером 9.
Узел 9 резки и образования складок содержит матрицу 11 и пуансон 13, взаимодействующие друг с другом для резки непрерывного листа макаронного теста Ρ и получения отдельных обрабатываемых изделий, которые образуют макароны, предназначенные для упаковывания. На фиг. 6 показан тип макаронного изделия, которое может быть изготовлено с помощью описываемой машины. В этом случае такое макаронное изделие имеет форму «галстука-бабочки», которую получают из прямоугольного резаного макаронного изделия, с зубчатыми краями и центральным участком со складками для образования галстука-бабочки.
Матрица 11 крепится в неподвижном положении к конструкции машины, в то время как пуансон 13 совершает возвратно-поступательное движение в направлении f13 и с этой целью подвижно крепится к ползуну 15, детально показанному на фиг. 5 и подробно описанному ниже. Пуансон и матрица являются съемными с целью производства макаронных изделий различных типов. В показанном примере матрица является сдвоенной и имеет двойной ряд отделений или ячеек 11А, в которые вставляются соответствующие режущие выступы 13а.
С матрицей 11 взаимодействуют два складкообразующих узла, обозначенные в целом ссылочными номерами 15 и 17. Верхний складкообразующий узел 15 содержит штангу 15А, к которой крепятся складкообразующие пальцы 15В в количестве, равном количеству отделений или ячеек 11А матрицы 11. Каждый складкообразующий палец 15В проникает в тело матрицы до тех пор, пока он не достигнет соответствующего отделения или ячейки 11А (фиг. 3). Аналогично, нижний складкообразующий узел 17 содержит штангу 17А, к которой крепятся складкообразующие пальцы 17В, выровненные со складкообразующими пальцами 15В и проникающие в соответствующие отделения или ячейки 11А матрицы 11. С помощью, по существу, известного способа два складкообразующих узла 15 и 17 совершают возвратно-поступательное движение в направлениях f15 и f17, соответственно, синхронизированное с перемещением пуансона 13, для образования центральной складки в отдельных прямоугольных макаронных изделиях (фиг. 6) после их изготовления посредством резки в результате прохождения режущих выступов 13А пуансона 13 через соответствующие отделения или ячейки 11А матрицы.
Между матрицей 11 и пуансоном 13 на позиции выталкивания установлена неподвижная пластина 19 с отверстиями 19А, соответствующими режущим выступам 13А и отделениям или ячейкам 11А матрицы 11, для предотвращения прилипания подвергаемого резке в матрице макаронного теста к пуансону и его случайного выталкивания.
С матрицей 11 взаимодействует выталкивающая гребенка 21. В показанном примере выталкивающая гребенка 21 является сдвоенной, поскольку матрица 11 и пуансон 13 также являются сдвоенными, т.е. снабжены двойной группой отделений или ячеек 11А и режущих выступов 13А, расположенных в двух противолежащих рядах. Соответственно, выталкивающая гребенка 21 имеет два совмещенных ряда стержней или зубцов 21А, 21В. Выталкивающая гребенка 21 поддерживает отдельные резаные макаронные изделия в отделениях или ячейках 11А матрицы 11 во время образования складок и выталкивает резаные макаронные изделия со складками, после чего они падают в лоток 22 и далее поступают в бункер 23.
Возвратно-поступательное перемещение ползуна 13 в направлении f13 обеспечивается с помощью эксцентрикового механизма, вал которого обозначен ссылочным номером 25. Ползун 15 показан в разобранном виде на фиг. 5 без пуансона 13. На фиг. 5 также показаны боковые направляющие 27, прикрепленные сбоку к ползуну 15, которые входят в зацепление с двумя скользящими блоками 29 с циркулирующими шариками, в свою очередь, прикрепленными к неподвижной конструкции машины и, в частности, к профилям 31, в свою очередь, прикрепленным к поперечине 33.
Тот же самый непоказанный электропривод, который выполняет управление валом 25, также управляет качанием двух пар плеч 37, 39, прикрепленных к валам 41, 43. Плечи 37 поддерживают верхнюю качающуюся поперечину 45, в то время как плечи 39 поддерживают нижнюю качающуюся поперечину 47. Верхняя качающаяся поперечина 45 совершает качательное движение в направлении двойной стрелки f45 вблизи вала 41, в то время как нижняя качающаяся поперечина 47 совершает качательное движение в направлении двойной стрелки f47 вблизи вала 43. Два качательных движения передаются на два складкообразующих узла, соответственно, верхний складкообразующий узел 15 и нижний складкообразующий узел 17.
Таким образом, один и тот же электропривод управляет движением резания (пуансон 13, установленный на ползуне 15) и движением для образования складок (складкообразующие узлы 15, 17).
Возвратно-поступательное движение в направлении f21 выталкивающей гребенки 21 обеспечивается отдельным механизмом, показанным отдельно на перспективном виде на фиг. 4 и описанным ниже. Выталкивающая гребенка 21 крепится к нескольким качающимся плечам 51. В показанном примере предусмотрены три качающихся плеча, но их количество может варьироваться, например, в зависимости от ширины машины 1 для резки и образования складок и, следовательно, длины выталкивающей гребенки 21. Плечи 51 крепятся с ограничением кручения к поворотному валу 53, совершающему возвратно-поступательное и вращательное движение в направлении f53 вокруг собственной оси А-А. Вал 53 поддерживается опорами 55, при этом его концы 53А выступают от самых дальних опор 55. С каждым концом 53А вала 53 соединен электродвигатель 57 с электронным управлением, например, бесщеточный электродвигатель. В показанном варианте осуществления изобретения каждый электродвигатель 57 соединен с соответствующим концом 53А вала 53 через угловой редуктор 59. Выход углового редуктора 59 соединен с соответствующим концом 53А вала с помощью гибкой муфты, помещенной в опорный элемент 61, к которому крепятся редуктор 59 с электродвигателем 57 и в который вставляется конец 53А вала.
Таким образом, возвратно-поступательное и вращательное движение вала 53 и, следовательно, возвратно-поступательное движение, передаваемое этим валом через качающиеся плечи 51 на выталкивающую гребенку 21, контролируется двумя электродвигателями 57, которые управляются программируемым контроллером или микропроцессором, который схематично обозначен ссылочным номером 63 на фиг. 4 и который также управляет движением главного электропривода машины. На фиг. 4 главный электропривод машины схематично обозначен одним электродвигателем 65, но подразумевается, что, фактически, машина также может иметь несколько электродвигателей для приведения в действие других компонентов. Например, барабан 7 подачи может приводиться в действие электродвигателем 8 с электронным управлением, например, бесщеточным электродвигателем, также управляемым с помощью программируемого контроллера или микропроцессора 63. Таким образом, все элементы машины 1 для резки и образования складок, даже если они приводятся в движение отдельными электродвигателями, могут управляться синхронизированным и скоординированным способом, как требуется для выполнения всех перемещений в надлежащей временной последовательности.
Работа вышеописанной машины 1 для резки и образования складок, по существу, соответствует работе известных машин и может быть представлена следующим образом. Каландр 3, предпочтительно, за счет непрерывного движения, подает макаронное тесто Ρ вниз, по усмотрению образуя дополнительный провисающий участок, обозначенный символом РА на фиг. 2. Дополнительный провисающий участок РА макаронного теста может опираться на лоток или опору 4. Затем макаронное тесто А поэтапно подается барабаном 7 подачи к узлу 9 резки и образования складок, проходя между матрицей 11 и пластиной 19. На каждом этапе непрерывный лист макаронного теста Ρ останавливается, и пуансон 13 выполняет резку, проталкивая макаронное тесто Ρ внутрь отделений или ячеек 11А матрицы 11. Когда пуансон выполняет перемещение для выхода из матрицы, складкообразующие узлы 15, 17 перемещаются друг к другу, образуя складки на макаронных изделиях в ячейках 11А. Согласованно с перемещением пуансона выталкивающая гребенка 21 вставляется зубцами 21А, 21В в ячейки или отделения 11А двух рядов ячеек матрицы 11. После выполнения складок выталкивающая гребенка перемещается в сторону от матрицы, выталкивая отрезанные макаронные изделия со складками, которые падают в сборный бункер 23.
Вариант выполнения исполнительного механизма гребенки 21 с электродвигателями 57 обеспечивает сбалансированное движение вала 53, по существу, без деформаций кручения, при этом вся зона ниже вала, в которой расположен бункер 23, остается свободной.
Использование отдельных электродвигателей для управления выталкивающей гребенкой 21 позволяет перемещать выталкивающую гребенку вручную, когда машина 1 для резки и образования складок не работает, например, во время выполнения технического обслуживания или настроек. Эта операция невозможна в обычных машинах, где выталкивающая гребенка связана через кинематическую схему со всеми остальными подвижными элементами и главным приводом.
В менее преимущественных вариантах выполнения может быть предусмотрен только один электродвигатель с электронным управлением только на одном конце вала 53, но в этом случае сечение вала 53 должно иметь размеры, позволяющие значительно уменьшить деформации кручения. В других вариантах выполнения один электродвигатель может быть установлен по центру вала 53, но это требует обеспечения соответствующего пространства на месте установки электродвигателя, что влечет за собой недостатки конструкции.
На фиг. 7 показан вид модифицированного варианта осуществления изобретения, схожий с видом из фиг. 4. В этом варианте осуществления изобретения вал 53 снабжен одним электродвигателем 57, расположенным между концами 53А вала. Плечи 51 расположены между электродвигателем и каждым из двух концов 53А вала. Эта конфигурация, которая особо пригодна в случае машин с ограниченными поперечными размерами, обеспечивает симметричные напряжения на валу 53 с одним электродвигателем 57.
В вышеописанных вариантах выполнения выталкивающая гребенка 21 приводится в действие валом 53, совершающим возвратно-поступательное и вращательное движение вокруг своей оси, регулируемое поворотными двигателями. В других вариантах выполнения вал может совершать возвратно-поступательное движение, например, регулируемое одним или двумя линейными двигателями с электронным управлением. Соответствующие линейные направляющие могут корректировать перемещение вала.
Вал может быть образован по существу, из цилиндрического удлиненного компонента, как показано на приложенных чертежах. В других вариантах выполнения может быть предусмотрен вал или подвижный элемент другой формы, например, в форме штанги или другого тела, предпочтительно, удлиненной формы, продолжающийся параллельно выталкивающей гребенке 21 и, следовательно, в поперечном направлении относительно машины.
Вышеописанные и показанные на чертежах варианты выполнения были детально представлены в качестве примеров варианта осуществления изобретения. Специалистам в этой области понятно, что может быть выполнено множество модификаций, изменений, добавлений и опущений без отклонения от принципов, идей и описания настоящего изобретения, как определено в приложенной формуле изобретения. Таким образом, объем изобретения должен определяться только на основе самого широкого толкования приложенной формулы изобретения, содержащей эти модификации, изменения, добавления и опущения. Термин «содержит» и его производные не исключают наличие других элементов или этапов помимо элементов и этапов, специально указанных в конкретном пункте формулы изобретения. Термин, обозначающий элемент, средство или характеристику и выраженный в пункте формулы изобретения в единственном числе, не исключает наличие нескольких таких элементов, средств или характеристик. Когда в пункте, относящемся к устройству, перечисляется несколько «средств», некоторые из этих «средств» или все эти «средства» могут быть внедрены посредством одного компонента, элемента или конструкции. Определение конкретных элементов, характеристик или средств в отдельных зависимых пунктах не исключает возможности комбинирования вышеуказанных элементов, характеристик и средств друг с другом. Когда в пункте, относящемся к способу, перечисляется последовательность этапов, последовательность, в которой перечисляются эти этапы, не является обязательной и может быть модифицирована, если конкретная последовательность не указана, как обязательная. Любые ссылочные номера в приложенной формуле изобретения предназначены для облегчения чтения формулы изобретения со ссылкой на описание и чертежи и не ограничивают объем защиты, определяемый этой формулой изобретения.
Изобретение относится к пищевой промышленности и может быть применено при производстве макаронных изделий для резки и образования складок. Машина содержит матрицу, пуансон, взаимодействующий с матрицей, складкообразующие узлы, взаимодействующие с матрицей, по меньшей мере одну выталкивающую гребенку для выталкивания отрезанных макаронных изделий со складками из матрицы, кинематические механизмы для синхронного перемещения пуансона и складкообразующих узлов. Выталкивающая гребенка установлена на плечах, прикрепленных к валу, имеющему возможность совершения возвратно-поступательного движения вокруг собственной оси (А-А) с помощью по меньшей мере одного электродвигателя, отдельного по отношению к электроприводу складкообразующих узлов и пуансону и управляемого посредством электронного управления синхронно с перемещением складкообразующих узлов и пуансона. Использование изобретения позволит упростить конструкцию машины для резки и образования складок при производстве макаронных изделий. 11 з.п. ф-лы, 7 ил.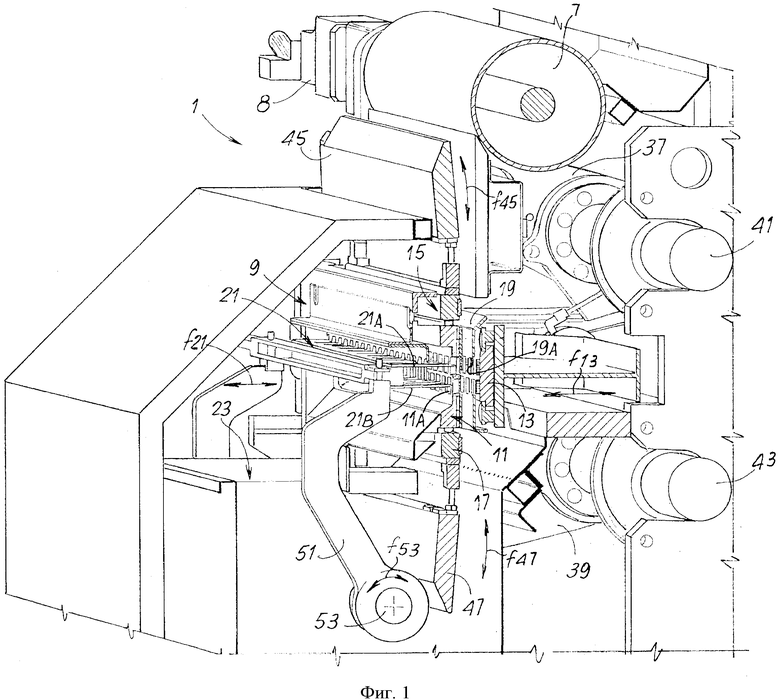
1. Машина для резки и образования складок, предназначенная для производства макаронных изделий и содержащая:
- матрицу;
- пуансон, взаимодействующий с матрицей;
- складкообразующие узлы, взаимодействующие с матрицей;
- по меньшей мере одну выталкивающую гребенку для выталкивания отрезанных макаронных изделий со складками из матрицы;
- кинематические механизмы для синхронного перемещения пуансона и складкообразующих узлов;
отличающаяся тем, что по меньшей мере одна выталкивающая гребенка установлена на плечах, прикрепленных к элементу, имеющему возможность совершения возвратно-поступательного движения с помощью:
по меньшей мере одного электродвигателя, отдельного по отношению к склакдообразующим узлам и пуансону и управляемого посредством электронного управления синхронно с перемещением складкообразующих узлов и пуансона, при этом электродвигатель расположен в промежуточном положении между концами подвижного элемента; или
двух электродвигателей, расположенных с противоположных концов вышеуказанного элемента и управляемых синхронно друг с другом.
2. Машина по п. 1, отличающаяся тем, что вышеуказанный элемент является валом, имеющим возможность совершения возвратно-поступательного поворотного движения вокруг своей оси с помощью по меньшей мере одного электродвигателя.
3. Машина по п. 2, отличающаяся тем, что вал имеет возможность совершения возвратно-поступательного поворотного движения вокруг своей оси с помощью двух электродвигателей, расположенных с противоположных концов вала и управляемых синхронно друг с другом.
4. Машина по п. 1, отличающаяся тем, что вышеуказанный, по меньшей мере, один электродвигатель расположен в промежуточном месте элемента между его концами, при этом между каждым концом элемента и электродвигателем расположены одно или несколько плеч, на которых установлена выталкивающая гребенка.
5. Машина по п. 2, отличающаяся тем, что вышеуказанный, по меньшей мере, один электродвигатель расположен в промежуточном месте вала между его концами, при этом между каждым концом вала и электродвигателем расположены одно или несколько плеч, на которых установлена выталкивающая гребенка.
6. Машина по п. 1, отличающаяся тем, что электродвигатель или электродвигатели соединены с вышеуказанным элементом или с вышеуказанным валом через редуктор.
7. Машина по любому из пп. 2-5, отличающаяся тем, что электродвигатель или электродвигатели соединены с вышеуказанным элементом или с вышеуказанным валом через редуктор.
8. Машина по любому из пп. 1-6, отличающаяся тем, что между по меньшей мере одним электродвигателем или каждым из электродвигателей и вышеуказанным элементом или вышеуказанным валом установлена гибкая муфта.
9. Машина по любому из пп. 1-6, отличающаяся тем, что электродвигатель или электродвигатели являются бесщеточными электродвигателями.
10. Машина по любому из пп. 1-6, отличающаяся тем, что электродвигатель или электродвигатели являются линейными электродвигателями, при этом вышеуказанный элемент имеет возможность осуществления возвратно-поступательного прямолинейного перемещения в направлении под прямым углом к продольному продолжению вышеуказанного элемента.
11. Машина по любому из пп. 1-6, отличающаяся тем, что пуансон установлен на ползуне, направляемом скользящими блоками с циркулирующими шариками.
12. Машина по любому из пп. 1-6, отличающаяся тем, что пуансон и складкообразующие узлы являются управляемыми одним электродвигателем, отдельным от электродвигателя или электродвигателей, приводящих в действие выталкивающую гребенку.
| Способ приготовления гипсовой смеси | 1984 |
|
SU1191437A1 |
| Щеточный узел электрической машины | 1985 |
|
SU1265901A1 |
| Бетоноукладчик | 1976 |
|
SU620380A1 |
| ФИЛЬЕРА ДЛЯ ИЗГОТОВЛЕНИЯ МАКАРОННЫХ ИЗДЕЛИЙ МЕТОДОМ ЭКСТРУЗИИ | 2001 |
|
RU2197875C2 |

