Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения однопозиционного радиоволнового средства обнаружения (СО) с широкой зоной обнаружения (ЗО) для сигнализационного прикрытия двух лежащих рядом дорог, одна из которых имеет изгиб.
Нарушитель, продвигаясь по местности, как правило, использует существующую дорожную сеть. Достоверная информация, по какой дороге и в каком направлении двигается нарушитель, облегчает задачу силам реагирования по его задержанию. Поэтому сигнализационному прикрытию дорог уделяется значительное внимание [1]. На местности часто встречается такой элемент дорожной сети, как участок с двумя лежащими рядом дорогами, одна из которых имеет изгиб [2].
Для охранного мониторинга участка с двумя лежащими рядом дорогами могут применяться однопозиционные радиоволновые средства обнаружения с широкой зоной обнаружения (до 20-25 м). В настоящее время российские производители выпускают современные СО с рабочей частотой излучаемого сигнала 10,5 ГГц (Х-диапазон), что уменьшает влияние вибрации опоры, на которую устанавливается СО, и формирует широкую ЗО [3].
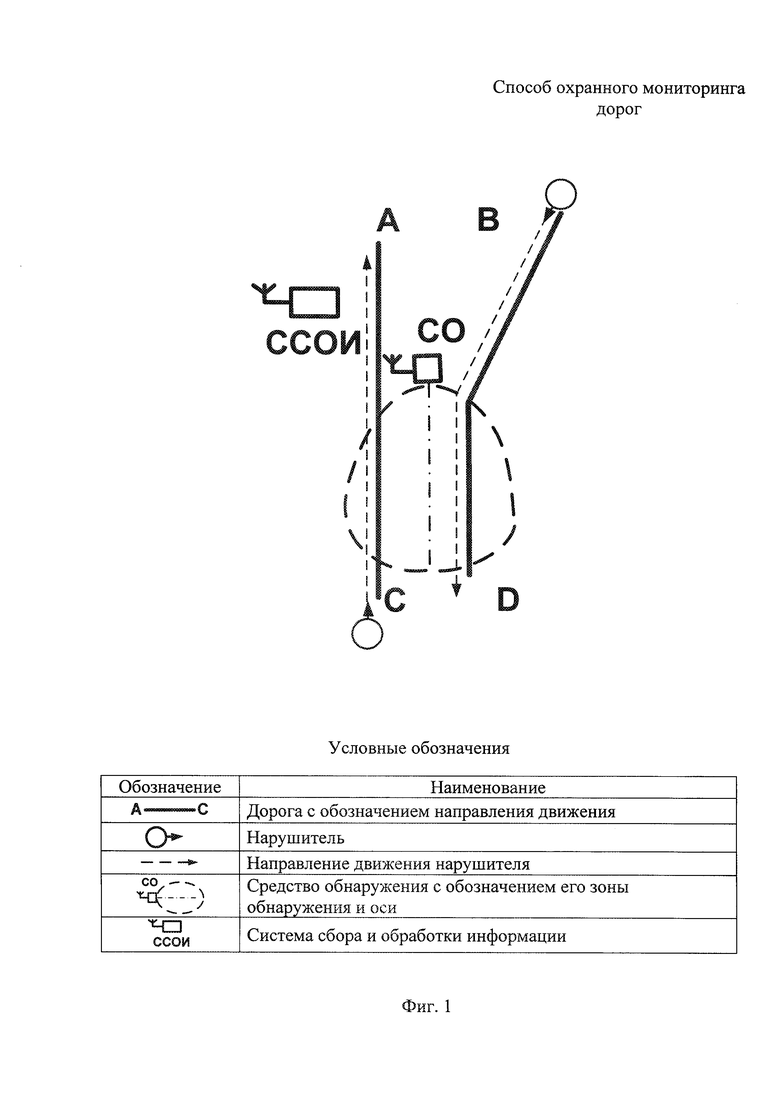
Известен способ охранного мониторинга участка с двумя лежащими рядом дорогами, заключающийся в развертывании однопозиционного радиоволнового средства обнаружения с широкой зоной обнаружения так, чтобы его ЗО пересекала обе дороги; выдаче сигнала тревоги СО в случае пересечения его ЗО нарушителем; анализе знака доплеровской добавки частоты отраженного сигнала на выходе схемы обработки сигналов СО в течение всего времени нахождения нарушителя в его ЗО; последующем применении алгоритма определения факта движения нарушителя по одной из двух дорог по наличию положительной или отрицательной доплеровской добавки частоты отраженного сигнала (фиг. 1) [4].
Главным недостатком известного способа является низкая точность указания направления движения нарушителя (устанавливается только факт движения нарушителя к или от СО).
Целью изобретения является получение возможности определения всех четырех направлений движения нарушителя раздельно с применением только одного однопозиционного радиоволнового средства обнаружения.
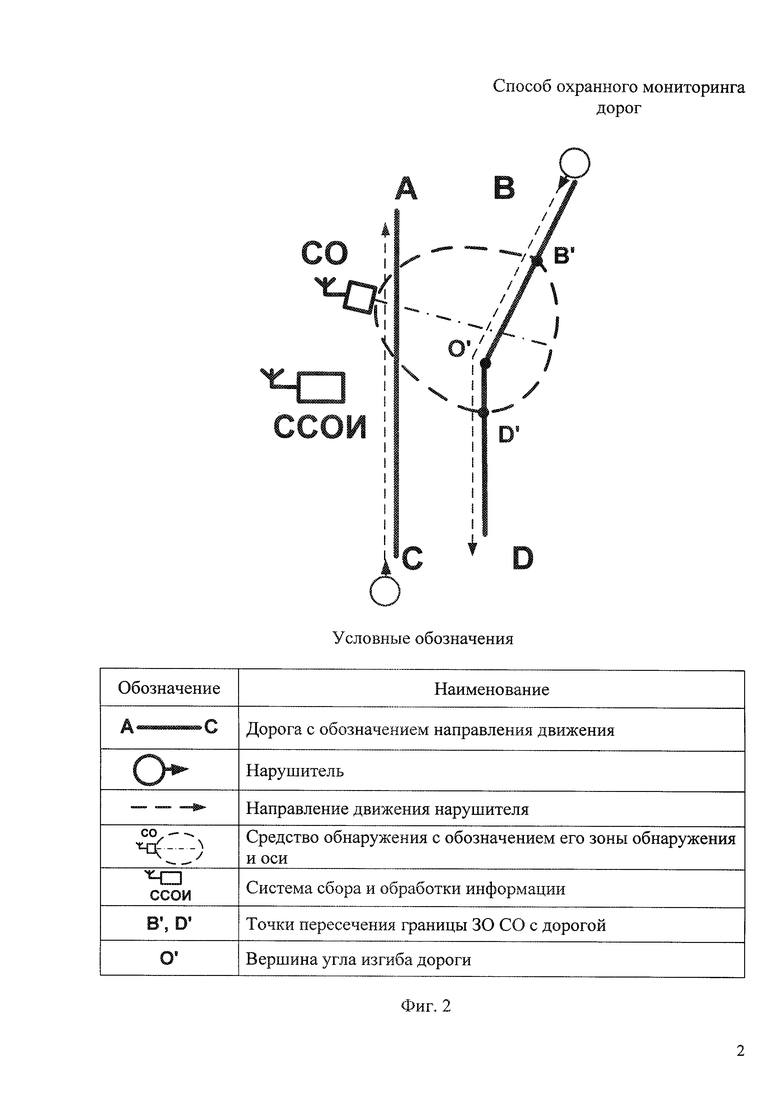
Для достижения поставленной цели разработан способ охранного мониторинга участка с двумя лежащими рядом дорогами, одна из которых имеет изгиб, заключающийся в развертывании СО на участке дорог, где они лежат к друг другу на расстоянии, не превышающем 80% от максимально возможной длины ЗО СО, так, чтобы СО находилось с внешней стороны угла изгиба дороги, за дорогой с прямым участком; ось ЗО была параллельна биссектрисе угла изгиба дороги и смещена относительно нее так, чтобы отношение длин двух участков дороги, лежащих по разные стороны от вершины угла ее изгиба и находящихся в ЗО, было 1:4; выдаче сигнала тревоги СО в случае пересечения нарушителем его ЗО; анализе доплеровской добавки частоты (ДДЧ) отраженного сигнала на выходе схемы обработки сигналов СО в течение всего времени нахождения нарушителя в его ЗО; определении направления движения по дороге с прямым участком по наличию положительной или отрицательной ДДЧ отраженного сигнала; определении направления движения по дороге с изгибом по отношению длительности первой части отраженного сигнала, имеющего положительный знак ДДЧ, к длительности второй части отраженного сигнала, имеющего отрицательный знак ДДЧ (фиг. 2).
Известно, что знак ДДЧ отраженного сигнала зависит от направления движения нарушителя относительно СО [5].
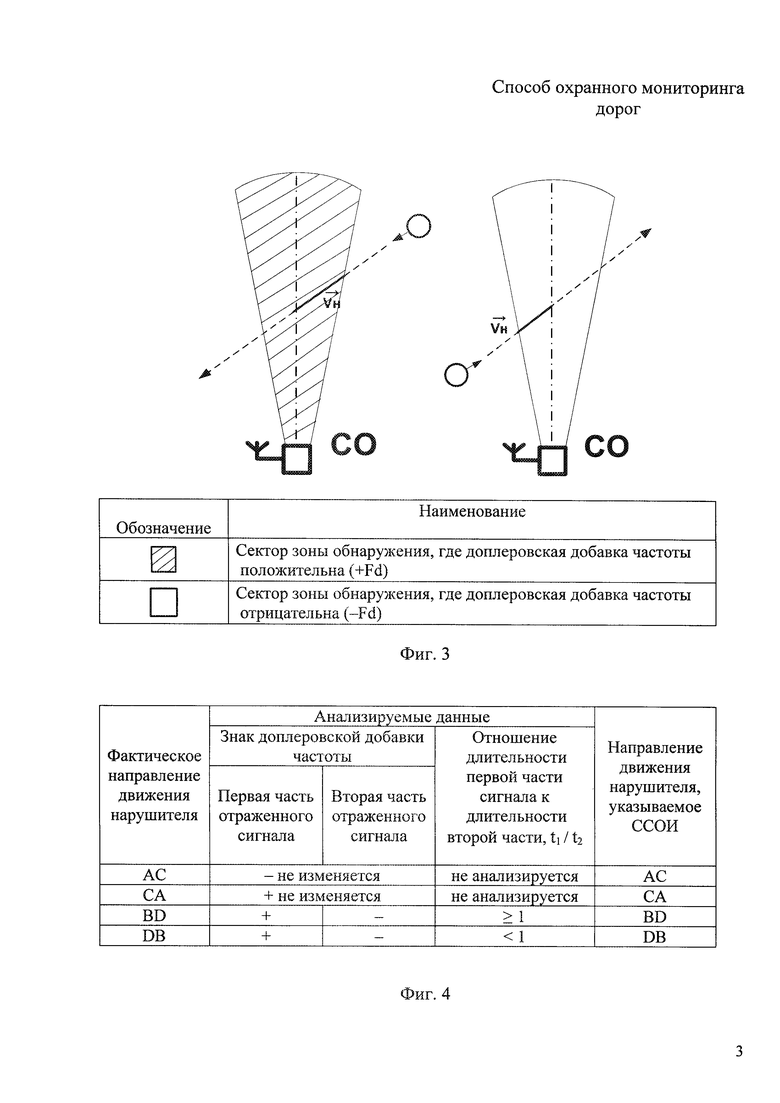
При приближении нарушителя к СО вектор радиальной скорости нарушителя направлен к СО, поэтому доплеровская добавка частоты в отраженном сигнале - положительная (фиг. 3).
При удалении нарушителя от СО вектор радиальной скорости нарушителя направлен от СО, поэтому доплеровская добавка частоты в отраженном сигнале - отрицательная (фиг. 3).
Если нарушитель движется по дороге АС, то определение направления его движения осуществляется по наличию положительной или отрицательной ДДЧ отраженного сигнала:
- при движении нарушителя в направлении АС ДДЧ отраженного сигнала будет отрицательная, так как нарушитель удаляется от СО;
- при движении нарушителя в направлении СА ДДЧ отраженного сигнала будет положительная, так как нарушитель приближается к СО.
При движении нарушителя по дороге BD отраженный сигнал условно можно разделить на две части, которые отличаются друг от друга знаком доплеровской добавки частоты и длительностью.
Изменение знака доплеровской добавки частоты происходит после прохождения нарушителем вершины угла изгиба дороги BD и обусловлено особенностью схемой развертывания СО относительно этого изгиба, предусматривающей следующее отношение длины участка дороги, находящейся в ЗО (фиг. 2):

где D'O, OB' - находящиеся в ЗО СО участки дороги BD, м.
Так, на дороге BD определение направления движения нарушителя осуществляется по следующим признакам:
- при движении нарушителя в направлении BD доплеровская добавка частоты отраженного сигнала будет сначала положительная (нарушитель приближается к СО), затем отрицательная (нарушитель удаляется от СО), причем длительность первой части сигнала в несколько раз больше длительности второй части сигнала (фиг. 4);
- при движении нарушителя в направлении DB доплеровская добавка частоты отраженного сигнала будет также сначала положительная, затем отрицательная, при этом длительность первой части сигнала, наоборот, в несколько раз меньше длительности второй части сигнала (фиг. 4):
где t1 - длительность первой части сигнала с положительной доплеровской добавкой частоты отраженного сигнала, с;
t2 - длительность второй части сигнала с отрицательной доплеровской добавкой частоты отраженного сигнала, с.
Соотношение длин участков 1:4 берется для повышения достоверности вывода о направлении движения нарушителя с учетом возможности изменения его скорости. Необходимо, чтобы время преодоления длинного участка (В'О') нарушителем было гарантировано больше чем время преодоления короткого участка (D'O') вне зависимости от его скорости. Известно, что неравномерность скорости движения пешего нарушителя по дорожной сети, как правило, не превышает 1,5 [2]:

где Vmax - верхний предел скорости движения нарушителя;
Vmin - нижний предел скорости движения нарушителя.
С учетом соотношения длин участков, даже если нарушитель пройдет короткий участок D'O' со скоростью в 1,5 раза медленнее, чем длинный участок О'В', время его преодоления нарушителем все равно будет меньше:

где t(B'O'), t(D'O') - время преодоления нарушителем участков В'О' и D'O', соответственно, с.
Способ включает два этапа: подготовительный и основной.
Подготовительный этап включает:
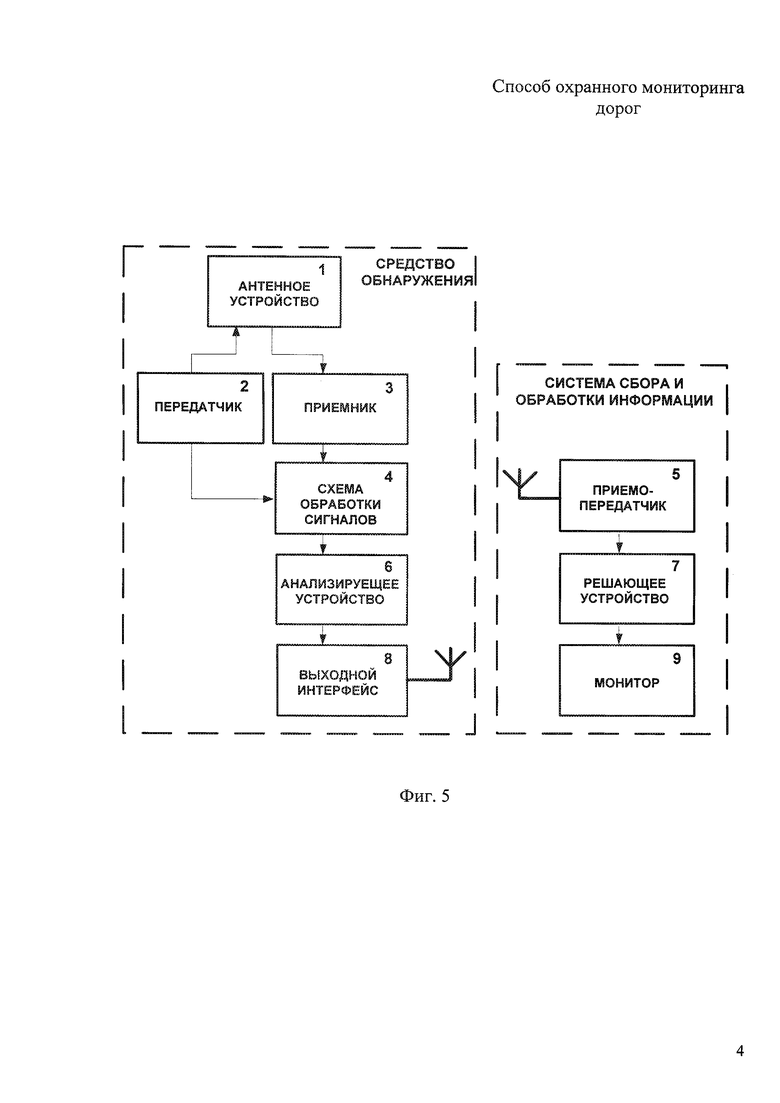
1. Развертывание СО с антенным устройством 1, передатчиком 2, приемником 3, схемой 4 обработки сигналов, анализирующим устройством 6 и выходным интерфейсом 8 по разработанной схеме (фиг. 2, 5).
2. Развертывание на местности системы сбора и обработки информации (ССОИ), включающей в себя приемопередатчик сигналов 5, решающее устройство 7 и монитор 9 (фиг. 5).
3. Запись алгоритма определения направления движения нарушителя в решающее устройство 7 ССОИ (фиг. 4).
4. Начало работы СО и ССОИ.
Основной этап начинается попаданием нарушителя в зону обнаружения СО, он включает:
1. Излучение зондирующего сигнала передатчиком 2 через антенное устройство 1 и прием отраженного от нарушителя сигнала приемником 3 (фиг. 5).
2. Регистрацию СО появления нарушителя в его ЗО схемой 4 обработки сигналов (фиг. 5).
3. Началом анализа знака ДДЧ отраженного от нарушителя сигнала анализирующим устройством 6 (фиг. 5).
4. В случае окончания поступления сигнала с ДДЧ передача через выходной интерфейс 8 данных об отраженном сигнале на приемопередатчик 5 ССОИ (фиг. 5).
5. Получение данных об отраженном сигнале от СО приемопередатчиком 5 (фиг. 5).
6. Определение направления движения нарушителя (СА или АС) решающим устройством 7 по наличию положительной или отрицательной ДДЧ отраженного сигнала (фиг. 4).
7. В случае изменения знака ДДЧ регистрацию анализирующим устройством 6 и фиксирование им длительности первой части сигнала (фиг. 5).
8. Регистрацию СО факта выхода нарушителя из ЗО схемой 4 обработки сигналов и фиксацию им длительности второй части сигнала (фиг. 5).
9. Передача через выходной интерфейс 8 данных об отраженном сигнале на приемопередатчик 5 ССОИ (длительности первой и второй части сигнала и знака доплеровской добавки частоты) (фиг. 5).
10. Получение данных об отраженном сигнале от СО приемопередатчиком 5 (фиг. 5).
11. Определение направления движения нарушителя (ВО или ОВ) решающим устройством 7 по отношению длительности первой части отраженного сигнала, имеющего положительный знак ДДЧ к длительности второй части отраженного сигнала, имеющего отрицательный знак ДДЧ (фиг. 4).
12. Выведение результата на монитор 9 (фиг. 5).
Сущность изобретения поясняется графическими материалами, где представлены:
фиг. 1 - схема развертывания СО в известном способе;
фиг. 2 - схема развертывания СО в предлагаемом способе;
фиг. 3 - схема, показывающая направление вектора радиальной скорости нарушителя при движении его в направлении к и от СО;
фиг. 4 - алгоритм (таблица) определения направления движения нарушителя;
фиг. 5 - структурная схема взаимосвязи применяемых устройств при реализации способа.
Технический результат состоит в получении возможности определения всех четырех направлений движения нарушителя раздельно с применением только одного однопозиционного радиоволнового средства обнаружения (фиг. 4).
Источники информации
1. Шумов, В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
2. Псарев, А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
3. Р7836.026-2012 Рекомендации по использованию технических средств обнаружения, основанных на различных физических принципах, для охраны огражденных территорий и открытых площадок (код: К.5.И.02.2012, шифр: «Территория»), 2012. - 358 с.
4. Коршняков, В.Г. Сигнализационные средства охраны локальных участков: уч. пособие / В.Г. Коршняков - Калининград: КИИ ФСБ РФ, 2004. - 135 с.
5. Финкельштейн, М.И. Основы радиолокации: Учебник. - М: Советское радио, 1973. - 495 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОХРАННОГО МОНИТОРИНГА ДВУХ ЛЕЖАЩИХ РЯДОМ ДОРОГ | 2016 |
|
RU2634745C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА ДВУХ ЛЕЖАЩИХ РЯДОМ ДОРОГ | 2016 |
|
RU2621597C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА МЕСТА ПЕРЕСЕЧЕНИЯ ТРЕХ ДОРОГ | 2016 |
|
RU2626742C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА ТРЕХСТОРОННЕЙ РАЗВИЛКИ ДОРОГ | 2016 |
|
RU2620963C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА ДОРОГИ ЛИНЕЙНЫМ РАДИОВОЛНОВЫМ СРЕДСТВОМ ОБНАРУЖЕНИЯ | 2018 |
|
RU2690216C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ДВУХСТОРОННЕЙ РАЗВИЛКИ ДОРОГИ | 2015 |
|
RU2605509C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА ПЕРЕСЕЧЕНИЯ ДОРОГ ЛИНЕЙНЫМ РАДИОВОЛНОВЫМ СРЕДСТВОМ ОБНАРУЖЕНИЯ | 2018 |
|
RU2701474C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ РАЗВИЛКИ ДОРОГИ | 2015 |
|
RU2612327C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА С ПРИМЕНЕНИЕМ ДВУХ ЛИНЕЙНЫХ РАДИОВОЛНОВЫХ СРЕДСТВ ОБНАРУЖЕНИЯ | 2018 |
|
RU2696087C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА | 2016 |
|
RU2617575C1 |
Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения однопозиционного радиоволнового средства обнаружения (СО) с широкой зоной обнаружения (ЗО) для сигнализационного прикрытия двух лежащих рядом дорог, одна из которых имеет изгиб. Способ заключается в развертывании СО на участке дорог, где они лежат к друг другу на расстоянии, не превышающем 80% от максимально возможной длины ЗО СО так, чтобы СО находилось с внешней стороны угла изгиба дороги, за дорогой с прямым участком; ось ЗО была параллельна биссектрисе угла изгиба дороги и смещена относительно нее так, чтобы отношение длин двух участков дороги, лежащих по разные стороны от вершины угла ее изгиба и находящихся в ЗО, было 1:4; выдаче сигнала тревоги СО в случае пересечения нарушителем его ЗО; анализе доплеровской добавки частоты (ДДЧ) отраженного сигнала на выходе схемы обработки сигналов СО в течение всего времени нахождения нарушителя в его ЗО; определении направления движения по дороге с прямым участком по наличию положительной или отрицательной ДДЧ отраженного сигнала; определении направления движения по дороге с изгибом по отношению длительности первой части отраженного сигнала, имеющего положительный знак ДДЧ, к длительности второй части отраженного сигнала, имеющего отрицательный знак ДДЧ. Технический результат состоит в получении возможности определения всех четырех направлений движения нарушителя раздельно с применением только одного однопозиционного радиоволнового средства обнаружения. 5 ил.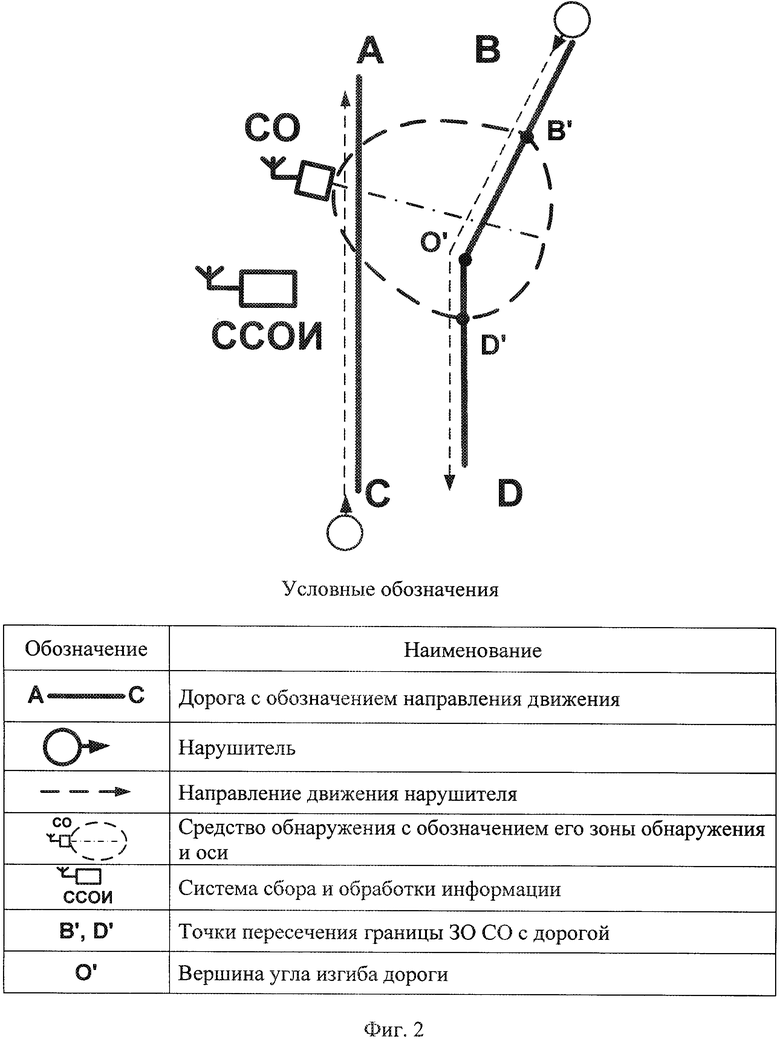
Способ охранного мониторинга двух лежащих рядом дорог, заключающийся в развертывании однопозиционного радиоволнового средства обнаружения с широкой зоной обнаружения на участке местности, где расстояние между дорогами не превышает 80% от максимально возможной длины зоны обнаружения однопозиционного радиоволнового средства обнаружения, так, чтобы его зона обнаружения пересекала обе дороги; выдаче сигнала тревоги средством обнаружения в случае пересечения нарушителем его зоны обнаружения; анализе знака доплеровской добавки частоты отраженного сигнала на выходе схемы обработки сигналов средства обнаружения в течение всего времени нахождения нарушителя в его зоне обнаружения; последующем применении алгоритма определения стороны, в которую движется нарушитель, по наличию положительной или отрицательной доплеровской добавки частоты отраженного сигнала с учетом схемы развертывания средства обнаружения, отличающийся тем, что средство обнаружения развертывается с внешней стороны угла изгиба дороги, за дорогой с прямым участком; ось зоны обнаружения ориентируется параллельно биссектрисе угла изгиба дороги и смещается относительно нее так, чтобы отношение длин двух участков дороги, лежащих по разные стороны от вершины угла ее изгиба и находящихся в зоне обнаружения, было 1:4; определении направления движения по дороге с прямым участком по наличию положительной или отрицательной доплеровской добавки частоты отраженного сигнала; определении направления движения по дороге с изгибом по отношению длительности первой части отраженного сигнала, имеющего положительный знак доплеровской добавки частоты к длительности второй части отраженного сигнала, имеющего отрицательный знак доплеровской добавки частоты.
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ НАРУШИТЕЛЯ | 2012 |
|
RU2517687C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ НАРУШИТЕЛЯ ОБРЫВНЫМИ СРЕДСТВАМИ ОБНАРУЖЕНИЯ | 2011 |
|
RU2485596C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ВТОРЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В КОНТРОЛИРУЕМУЮ ЗОНУ | 1998 |
|
RU2133046C1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| JP 2007184780 A, 19.07.2007. | |||

