Изобретение относится к способам охранного мониторинга местности и может быть использовано в случаях применения радиоволнового линейного средства обнаружения (СО) для сигнализационного прикрытия изгиба дороги.
Часто маршрут движения нарушителя на местности проходит по имеющейся дорожной сети. Знание силами реагирования, направления движения нарушителя имеет большое значение, так как позволяет сузить направление его поиска и повышает вероятность его обнаружения и задержания [1]. Поэтому сигнализационному прикрытию дорожной сети уделяется значительное внимание. Одним из наиболее часто встречаемых элементов дорожной сети является изгиб дороги (дугообразный поворот, искривление дороги - состоящие из двух смежных прямых участков дороги, соединенных круговой кривой) [2, 3].
На практике для сигнализационного прикрытия участков дорожной сети широко применяются радиоволновые линейные средства обнаружения, характеризующиеся значительной протяженностью зоны обнаружения (ЗО) - от 50 до 500 м [4, 5].
Известен способ охранного мониторинга для прикрытия изгиба дороги, заключающийся в развертывании одного СО, таким образом, чтобы его ЗО пересекала изгиб дороги, в выдаче сигнала тревоги, при пересечении нарушителем его ЗО и формировании вывода об обнаружении нарушителя (фиг. 1).
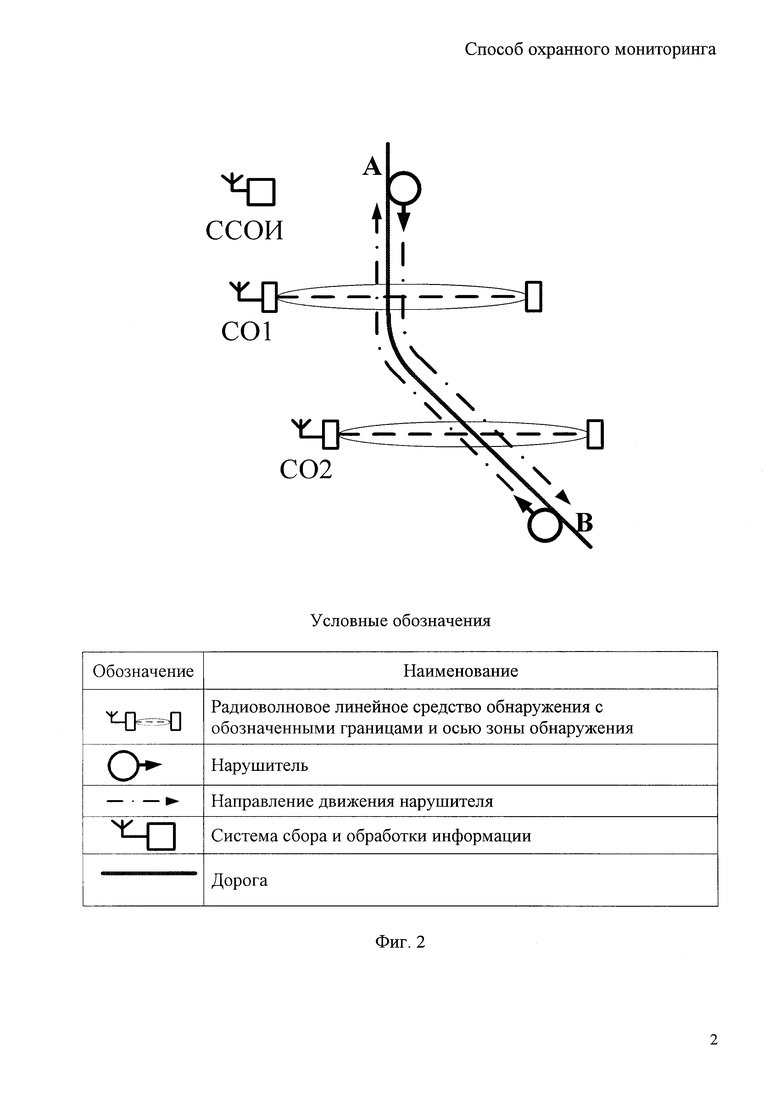
Известен другой способ охранного мониторинга для прикрытия изгиба дороги, заключающийся в развертывании двух СО, таким образом, чтобы ЗО каждого СО пересекала изгиб, в последовательной выдаче двух сигналов тревоги - по одному каждым из СО, при пересечении нарушителем их ЗО, в фиксации последовательности поступления двух сигналов тревог от СО и применении алгоритма определения направления движения обнаруженного нарушителя на основе анализа очередности поступления сигналов тревог от двух СО (фиг. 2).
Недостатком первого указанного способа является невозможность определения направления движения обнаруженного нарушителя двигающегося через изгиб дороги.
Второй указанный способ имеет возможность определения направления движения нарушителя, двигающегося через изгиб дороги, однако для его реализации необходимо развертывание двух СО.
Целью изобретения является получение возможности определения направления движения нарушителя, обнаруженного на изгибе дороги, с применением только одного СО.
Для достижения поставленной цели разработан способ охранного мониторинга, заключающийся в контроле изгиба дороги одним СО, развернутом на изгибе дороги с учетом расширения ЗО ближе к середине ее оси, таким образом, чтобы его ЗО пересекала дорогу в двух местах, для которых ширина большего из участков зоны обнаружения превышала ширину меньшего из участков не менее чем в три раза; расстояние по дороге между этими местами пересечения превышало в полтора раза расстояние, проходимое нарушителем с максимально возможной скоростью для данного участка дороги за время, необходимое СО для перехода из режима тревоги в дежурный режим после выхода нарушителя из ЗО; последовательной выдаче СО двух сигналов тревоги при движении нарушителя через изгиб дороги и пересечении ЗО СО; применении алгоритма, определяющего направление движения нарушителя по значению соотношения длительности первого сигнала тревоги к длительности второго сигнала тревоги, поступивших за установленный интервал времени, зависящий от расстояния между местами пересечения ЗО СО с дорогой и минимально возможной скоростью движения нарушителя для данного участка дороги (фиг. 3).
Форма ЗО рассматриваемого радиоволнового линейного средства обнаружения представляет собой эллипсоид вращения и, как следствие, ширина ее вдоль оси разная: максимальная посередине ЗО (Н) и минимальная (Н') вблизи от передатчика (ПРД) и приемника (ПРМ) (фиг. 3, 4) [4, 5].

где Н - ширина ЗО СО посередине, м;
Н' - ширина ЗО СО на удалении 5 м от ПРД (ПРМ), м.
Из этого следует, что время нахождения СО в режиме тревоги будет зависеть от места пересечения ЗО нарушителем, т.е. чем шире участок ЗО, который пересекает нарушитель, тем больше длительность сигнала тревоги, формируемая СО.

где tН - длительность сигнала тревоги при пересечении нарушителем ЗО СО посередине, с;
tH' - длительность сигнала тревоги при пересечении нарушителем ЗО СО вблизи от ПРМ (ПРД), с;
V - скорость движения нарушителя, м/с.
Если нарушитель движется через изгиб дороги, в любом из двух возможных направлений АВ или ВА, то от СО на систему сбора и обработки информации (ССОИ) поступит два сигнала тревоги с длительностями (tH) и  и по величине отношения между собой длительностей этих сигналов тревог можно сделать вывод о направлении движения нарушителя.
и по величине отношения между собой длительностей этих сигналов тревог можно сделать вывод о направлении движения нарушителя.
Так, при движении нарушителя в направлении АВ он сначала пересечет узкий участок ЗО, затем широкий (фиг. 3):

то есть отношение длительности первого сигнала тревоги будет меньше длительности второго сигнала тревоги (фиг. 5):

где t1, t2 - длительности первого и второго сигнала тревоги формируемые СО соответственно, с.
При движении нарушителя в направлении ВА он сначала пересечет широкий участок ЗО, затем узкий (фиг. 3):

то есть отношение длительности первого сигнала тревоги будет больше длительности второго сигнала тревоги (фиг. 5):

Неравномерность скорости движения нарушителя через изгиб дороги может снизить вероятность правильного вывода о направлении движения нарушителя. Пеший нарушитель движется со скоростью, пределы которой зависят от условий местности, определены практически, известны и подтверждены на основе экспериментальных исследований [6]. Верхний предел скорости нарушителя не превышает нижний более чем в полтора раза (фиг. 6).

где VMAX - максимальная скорость движения нарушителя через изгиб дороги, м/с;
VMIN - минимальная скорость движения нарушителя через изгиб дороги, м/с.
Чтобы гарантированно исключить ошибку в выводе о направлении движения нарушителя, из-за неравномерности скорости его движения, необходимо выполнение условия развертывания СО, при котором максимальная ширина ЗО, пересекающая изгиб дороги, больше минимальной ширины ЗО, пересекающей изгиб дороги в другом месте, не менее чем в три раза (фиг. 3).

Тогда, если нарушитель пересечет участок с максимальной шириной ЗО с наибольшей скоростью, а участок с минимальной шириной ЗО с наименьшей скоростью, то с учетом выражений (формулы 7 и 8) значение длительности сигнала тревоги сформированного СО в первом случае все равно будет превышать длительность сигнала тревоги во втором случае минимум в два раза.
Чтобы от СО поступило два раздельных сигнала тревоги при движении нарушителя через изгиб дороги, необходимо, чтобы время, затраченное нарушителем для преодоления расстояния между местами пересечения ЗО СО с дорогой (А'В') с максимальной скоростью (VMIN) после выхода его из ЗО в месте первого пресечения с дорогой, было в полтора раза больше времени перехода СО из режима тревоги в дежурный режим (фиг. 3):

где tDR - время перехода в дежурный режим СО, с.
Нарушитель может двигаться как через изгиб дороги, пересекая последовательно два места пресечения с ЗО СО (два сигнала тревоги), так и пройдя только одно из мест пересечения ЗО СО с дорогой, сойти с изгиба дороги в сторону (один сигнал тревоги), поэтому необходимо определить максимальное время ожидания поступления второго сигнала. Оно зависит от расстояния (А'В'), которое нарушитель может пройти через изгиб дороги в заданном направлении от первого до второго места пересечения ЗО СО с дорогой и минимально возможной скоростью движения на данном участке дороги:

где Т - максимальное значение расчетного интервала времени накопления поступающих сигналов, с.
Коэффициент 1,2 берется для исключения ошибки вывода, возможной из-за неточности в определении скорости движения нарушителя.
В предлагаемой схеме развертывания СО выдерживаются также следующие размеры (фиг. 3):
- удаление мест пресечения оси ЗО с дорогой (точки А' и В') от точки изгиба (точка О) самой дороги, должно быть приблизительно равно:

где А'О и В'О - это расстояние от точки (О) изгиба дороги до мест пресечения оси ЗО с дорогой (точки А' и В'), м;
- удаление середины (точка С) участка ЗО, лежащей между двумя местами ее пересечения с дорогой от точки изгиба (точка О), должно превышать максимальную ширину ЗО более чем в три раза:

где ОС - это расстояние от точки (О) изгиба дороги до середины (точка С) участка ЗО, между двумя местами ее пересечения с дорогой (точки А' и В'), м.
Это позволяет исключить случайное попадание нарушителя в ЗО СО, помимо мест ее пересечения с дорогой.
Принятие решения о направлении движения нарушителя автоматизировано: при движении нарушителя через изгиб дороги СО формирует сигналы тревоги с длительностями (t1) и (t2), эта информация передается на систему сбора и обработки информации (ССОИ). Полученная информация в ССОИ анализируется в контексте известной схемы развертывания СО на местности, с применением алгоритма, определяющего направление движения нарушителя, по значению соотношения длительности первого сигнала тревоги к длительности второго сигнала тревоги, с учетом максимального значения расчетного интервала времени накопления поступающих сигналов (фиг. 5).
Способ включает два этапа: подготовительный и основной.
Подготовительный этап.
1. Развертывание средства 1 обнаружения по установленной схеме (фиг. 3).
2. Развертывание на местности системы сбора и обработки информации, включающей в себя: устройство 2 управления таймером, таймер 3, приемник 4 сигналов, решающее устройство 5, монитор 6 (фиг. 7).
3. Определение максимального значения интервала времени накопления поступающих сигналов (Т) (формула 10).
4. Составление таблицы принятия решения о направлении движения нарушителя через изгиб дороги и загрузку ее в решающее устройство 5 (фиг. 5, 7).
Основной этап начинается при движении нарушителя через изгиб дороги и попадании его в ЗО СО, он включает:
1. Регистрацию приемником 4 сигнала тревоги от средства 1 обнаружения при пересечении нарушителем его ЗО, запуском таймера 3 устройством 2 управления таймером, начало отсчета им длительности первого сигнала тревоги и времени накопления сигналов (Δt) и записью информации о поступлении первого сигнала тревоги от средства 1 обнаружения в решающее устройство 5 (фиг. 7).
2. При переходе средства 1 обнаружения в дежурный режим запись в решающее устройство 5 значения длительности первого сигнала тревоги. Продолжение отсчета времени накопления сигналов (Δt).
3. Регистрацию приемником 4 сигнала второго сигнала тревоги от средства 1 обнаружения при пересечении нарушителем второй раз его ЗО, начало отсчета им длительности второго сигнала тревоги и записью информации о поступлении второго сигнала тревоги от средства 1 обнаружения в решающее устройство 5.
4. При переходе средства 1 обнаружения в дежурный режим запись в решающее устройство 5 значения длительности второго сигнала тревоги и времени накопления сигналов (Δt).
5. Определение решающим устройством 5 направления движения нарушителя по значению соотношения длительности первого сигнала тревоги к длительности второго сигнала тревоги (фиг. 6).
6. Формирование вывода решающим устройством 5 о движении нарушителя через изгиб дороги без определения его направления в случае превышения времени накопления сигналов (Δt) максимального расчетного значения (Т) и не поступлении при этом второго сигнала от средства 1 обнаружения (фиг. 5).
7. Обнуление таймера 3 устройством 2 управления таймером.
8. Выведение результата на монитор 6 (фиг. 7).
Сущность изобретения поясняется графическими материалами, где представлено на:
- фиг. 1 - схема развертывания СО в известном способе охранного мониторинга для прикрытия изгиба дороги с применением одного СО;
- фиг. 2 - схема развертывания СО в известном способе охранного мониторинга для прикрытия изгиба дороги с применением двух СО;
- фиг. 3 - схема развертывания СО в предлагаемом способе, с указанием размеров;
- фиг. 4 - таблица типовых геометрических размеров ЗО СО;
- фиг. 5 - таблица принятия решения (алгоритм вывода) о направлении движения нарушителя через изгиб дороги;
- фиг. 6 - таблица диапазонов скоростей нарушителя на различных участках местности;
- фиг. 7 - структурная схема взаимосвязи применяемых устройств при реализации способа.
Технический результат заключается в получении возможности определения направления движения нарушителя, обнаруженного на изгибе дороги, с применением только одного СО.
Источники информации
1. Шумов В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
2. Псарев А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
3. Ганьшин В.Н., Хренов B.C. Таблицы для разбивки круговых и переходных прямых. - К.: 1974. - 432 с.
4. Коршняков В.Г. Сигнализационные средства охраны локальных участков: уч. пособие / В.Г. Коршняков. - Калининград: КПИ ФСБ РФ, 2004. - 135 с.
5. Маршалов Т.А. Технические средства охраны границы: учебник/ Т.А. Маршалов, А.В. Густов, И.М. Потапов. - Калининград: КПИ ФСБ РФ, 2009. - 568 с.
6. Баленко С.В. Школа выживания. - М.: 1994. - 140 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОХРАННОГО МОНИТОРИНГА С ПРИМЕНЕНИЕМ ЛИНЕЙНОГО РАДИОВОЛНОВОГО СРЕДСТВА ОБНАРУЖЕНИЯ | 2017 |
|
RU2645598C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ РАЗВИЛКИ ДОРОГИ | 2015 |
|
RU2612327C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА | 2016 |
|
RU2621179C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ДВУХСТОРОННЕЙ РАЗВИЛКИ ДОРОГИ | 2015 |
|
RU2605509C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА ДОРОГ | 2016 |
|
RU2622515C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ЛОКАЛЬНОГО УЧАСТКА МЕСТНОСТИ С ТРЕХСТОРОННЕЙ РАЗВИЛКОЙ ДОРОГИ | 2015 |
|
RU2605063C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА ДВУХ ЛЕЖАЩИХ РЯДОМ ДОРОГ | 2016 |
|
RU2634745C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА | 2017 |
|
RU2645548C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА РАЗВИЛКИ ДОРОГ С ПРИМЕНЕНИЕМ ЛИНЕЙНОГО РАДИОВОЛНОВОГО СРЕДСТВА ОБНАРУЖЕНИЯ | 2017 |
|
RU2648210C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА УЧАСТКА ДОРОГИ | 2017 |
|
RU2645204C1 |




Изобретение относится к способам охранного мониторинга местности и может быть использовано в случаях применения одного радиоволнового линейного средства обнаружения (СО) для сигнализационного контроля изгиба дороги. Способ заключается в контроле изгиба дороги одним СО, развернутом на изгибе дороги с учетом расширения зоны обнаружения (ЗО) ближе к середине ее оси, таким образом, чтобы его ЗО пересекала дорогу в двух местах, для которых ширина большего из участков зоны обнаружения, превышала ширину меньшего из участков не менее чем в три раза; расстояние по дороге между этими местами пересечения превышало в полтора раза расстояние, проходимое нарушителем с максимально возможной скоростью для данного участка дороги за время, необходимое СО для перехода из режима тревоги в дежурный режим после выхода нарушителя из ЗО; последовательной выдаче СО двух сигналов тревоги при движении нарушителя через изгиб дороги и пересечении ЗО СО; применении алгоритма, определяющего направление движения нарушителя, по значению соотношения длительности первого сигнала тревоги к длительности второго сигнала тревоги, поступивших за установленный интервал времени, зависящий от расстояния между местами пересечения ЗО СО с дорогой и минимально возможной скоростью движения нарушителя для данного участка дороги. Способ включает подготовительный этап с развертыванием по разработанной схеме СО на изгибе дороги и основной этап, который начинается обнаружением нарушителя и заканчивается формированием вывода о направлении движения нарушителя через изгиб дороги. Технический результат заключается в получении возможности определения направления движения нарушителя, обнаруженного на изгибе дороги, с применением только одного СО. 7 ил.
Способ охранного мониторинга, заключающийся в контроле изгиба дороги одним радиоволновым линейным средством обнаружения, в обеспечении регистрации системой сбора и обработки информации сигнала тревоги от средства обнаружения при пересечении нарушителем его зоны обнаружения, отличающийся тем, что средство обнаружения развертывается с учетом расширения зоны обнаружения ближе к середине ее оси по схеме, в которой зона обнаружения пересекает дорогу в двух местах, для которых ширина большего из участков зоны обнаружения превышает ширину меньшего из участков не менее чем в три раза, а расстояние по дороге между этими местами пересечения превышает в полтора раза расстояние, проходимое нарушителем с максимально возможной скоростью для данного участка дороги за время, необходимое средству обнаружения для перехода из режима тревоги в дежурный режим после выхода нарушителя из его зоны обнаружения, переходом средства обнаружения в тревожный режим дважды при движении нарушителя через изгиб дороги, при этом время ожидания поступления второго сигнала тревоги с момента поступления первого сигнала ограничено и зависит от расстояния между местами пересечения зоны обнаружения с дорогой и минимально возможной скоростью движения нарушителя для данного участка дороги, а также применением алгоритма, определяющего направление движения нарушителя по значению соотношения длительности первого сигнала тревоги к длительности второго сигнала тревоги.
| RU 2011124585 A, 10.01.2013 | |||
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ЕГО ДВИЖЕНИЯ НА ПЕРЕКРЕСТКЕ ДОРОГ И ПУТЯХ ЕГО ОБХОДА | 2014 |
|
RU2554530C1 |
| RU 2013146646 A, 27.04.2015 | |||
| RU 2009140332 A, 10.05.2011 | |||
| EP 1998304 A1, 03.12.2008 | |||
| ПРОВОДНО-ВОЛНОВОЕ СРЕДСТВО ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ | 1999 |
|
RU2157563C1 |

