Способ определения положения объектов относится к оптическим способам определения взаимного положения и взаимной ориентации объектов, а именно при определении положения сканирующих датчиков при измерении полного поперечного профиля объекта (например, измерение профиля трубы, профиля рельса и т.д.).
Объект (например, трубу большого диаметра) невозможно измерить одним датчиком из-за многократного превышения периметром размеров зоны измерения датчика. Поэтому для измерений полных профилей объектов обычно используют несколько оптических датчиков, жестко закрепленных на единой жесткой раме над поверхностью измеряемого объекта. Оптические датчики формируют излучение лазера в виде пучка и проецируют на поверхность объекта в виде линии. Датчики располагают так, чтобы каждая точка периметра объекта измерялась хотя бы одним из датчиков. Системы измерения полного профиля объекта содержат датчики, размещенные по периметру поверхности измеряемого объекта. Отраженное и рассеянное на поверхности объекта излучение собирается приемным устройством датчика. Изображения частей профиля, полученные датчиками системы, собираются для формирования изображения полного профиля объекта в устройство обработки данных. Пример измерительного устройства такого типа приведен в патенте РФ №2523092 и заявке на патент РФ №2011131485.
Каждый датчик измеряет часть двухмерного поперечного профиля объекта относительно своего положения в системе, то есть в своей собственной системе координат. Чтобы получить полный профиль объекта из частей, измеренных всеми датчиками, необходимо знать взаимное положение всех датчиков, то есть положение начала системы координат и направление излучения каждого датчика системы в единой абсолютной системе координат. Используя эти параметры, каждая часть профиля, измеренная соответствующим сканером, помещается на свое место путем поворота и перемещения. Положение датчиков определено техническими условиями, однако на практике ориентация датчиков может отличаться от заданной. Это ведет к формированию изображения профиля, не соответствующего действительному.
Недостатком известных устройств измерения профиля объектов является отсутствие контроля действительного положения датчиков в системе, положения которых может отличаться от установленного по конструкторской документации, и, как следствие, неточность измерения профиля, связанная с тем, что восстановление изображения поверхности осуществляется без учета действительного положения датчиков.
Задачей изобретения является создание способа, позволяющего осуществлять точное определение положения датчиков в измерительной системе.
Задача решается за счет того, что предлагается способ определения положения оптических датчиков в устройстве контроля замкнутого профиля изделий с использованием формирования датчиками световой линии на его поверхности с последующим получением изображения световой линии и его обработки, при котором в устройство вводят эталонный образец с плоской поверхностью, протяженность которой обеспечивает прием сигналов от двух соседних датчиков одновременно, образец вращают вокруг фиксированной оси в плоскости расположения датчиков устройства, получают изображение световых линий от каждой пары датчиков при нескольких разных положениях плоской поверхности, при каждом ее положении совмещают изображения световых линий двух датчиков, измеряют координаты второго датчика в системе координат первого датчика и при каждом ее положении измеряют угол между изображением световой линии профиля и осью абсцисс в системе координат датчика, у которой ось ординат совпадает с направлением излучения, и по разности измеренных углов для первого и второго датчиков в паре судят о разности их положений, и повторяют измерения последовательно для всех пар датчиков измерительной системы, в которых второй датчик в паре является первым для последующей пары, и таким образом последовательно определяют положения всех оптических датчиков в системе датчиков измерительного устройства, причем положения всех оптических датчиков определяют относительно первого датчика измерительного устройства.
Техническим результатом заявленного изобретения в варианте 1 его реализации является создание способа точного определение положения датчиков в измерительной системе, и, как следствие, возможность учета этого положения при формировании полного профиля объекта из частей, измеренных всеми датчиками измерительной системы.
Технический результат изобретения достигается тем, что с помощью измерений на эталонном объекте определяют действительное положение датчиков измерительной системы. Причем их положение определяют относительно выбранного датчика этой системы в единой системе координат. Действительное положение датчиков учитывается при составлении изображения полного профиля объекта из частей, полученных датчиками системы.
Во втором варианте исполнения способа задача решается за счет того, что предлагается способ определения положения оптических датчиков в устройстве контроля замкнутого профиля изделий с использованием формирования датчиками световой линии на его поверхности с последующим получением изображения световой линии и его обработки, при котором в устройство вводят эталонный образец с плоской поверхностью, протяженность которой обеспечивает прием сигналов от двух соседних датчиков одновременно, образец вращают вокруг фиксированной оси в плоскости расположения датчиков устройства, измеряют угол наклона поверхности эталонного образца датчиком угла поворота, получают изображение световых линий от каждой пары датчиков при нескольких разных положениях плоской поверхности, при каждом ее положении совмещают изображения световых линий двух датчиков, измеряют координаты второго датчика в системе координат первого датчика и измеряют угол между изображением световой линии профиля и осью абсцисс в системе координат датчика, у которой ось ординат совпадает с направлением излучения, и по разности измеренных углов для первого и второго датчиков в паре судят о разности их положений, и повторяют измерения последовательно для всех пар датчиков измерительной системы, в которых второй датчик в паре является первым для последующей пары, причем положение изображения, измеренного первым датчиком в паре, корректируют с учетом измеренного угла наклона поверхности эталонного объекта, и таким образом последовательно определяют положения всех оптических датчиков в системе датчиков измерительного устройства, причем положения всех оптических датчиков определяют относительно первого датчика измерительного устройства.
Техническим результатом изобретения в варианте 2 его исполнения является создание способа точного определения положения датчиков в измерительной системе, в котором осуществляется отстройка от погрешности, вводимой измерительными датчиками. Датчики, используемые для измерения профилей объектов, обладают погрешностью (нелинейностью), связанной с неидеальной заводской калибровкой. При последовательном определении положения датчиков относительно друг друга эта ошибка может накапливается и приводить к неверному определению положения датчиков в системе. Коррекция осуществляется путем измерения угла наклона поверхности эталонного объекта относительно его начального положения точным средством измерения, не имеющим погрешности датчика, и использования его для формирования изображения профиля, измеренного первым датчиком в паре. То есть при этом определение положения второго датчика в паре осуществляется на основании точно измеренного изображения от первого датчика. Таким образом при последовательном измерении для пар датчиков и пересчете их положения относительно первого датчика системы не накапливается ошибка измерения.
Способ поясняется чертежами - фиг. 1 и фиг. 2.
На фигуре 1 приведена схема измерения полного профиля объекта на примере контроля трубы измерительной системой из семи датчиков. Датчики размещены по периметру поверхности измеряемого объекта и обозначены Д1, Д2…Д7. Каждый датчик находится в начале собственной системы координат XnZn в точке On (n=1, 2…7), и излучение осуществляется в направлении оси Z. Треугольниками показаны рабочие зоны излучения датчиков, частично совпадающие на поверхности объекта. Изображение полного профиля объекта формируется из изображений в виде дуг, снятых датчиками. При точной расстановке датчиков по конструкторской документации изображение полностью соответствует профилю объекта и представляет собой круг. Смещение датчика относительно заданного положения приводит к изображению ложной деформированности профиля.
Способ поясняется фигурой 2, на которой схематически показано размещение датчиков в системе координат (в собственной и второго датчика в паре), а также плоская поверхность эталонного образца. Каждый датчик находится в центре собственной системы координат в точках O1, O2 и O3 соответственно. Треугольниками показаны рабочие зоны датчиков, частично совпадающие на поверхности объекта. Оси ординат Z систем координат датчиков совпадают с направлением излучения. Положение второго датчика Д2 определяется положением его системы координат X2Z2 в системе координат X1Z1 первого датчика координатой (dx1, dz1) начала системы координат O2 и направлением ее оси Z2 относительно оси Z1 первой системы (угол наклона U1). Точкой О обозначена точка, принадлежащая оси, вокруг которой осуществляется вращение объекта.
Способ осуществляется следующим способом.
Два датчика системы формируют на одной прямой поверхности эталонного образца световые линии. Рассеянный свет собирается приемной матрицей датчика, в результате чего формируются изображения поверхности от двух датчиков Д1 и Д2 измерительной системы в их собственных системах координат X1Z1 и X2Z2. Изображения поверхности представляют собой линии, расположенные под углом в своих системах координат. Объект вращают вокруг неподвижной оси (точка О на фиг. 2 лежит на этой оси в плоскости измерения) и проводят несколько измерений при разных наклонах поверхности образца. В измерительной системе датчики расположены относительно друг друга под углом. Совмещение изображений измеренных прямых позволяет поместить объекты в одну плоскость и привести объекты (прямые и измерительные датчики) к единой системе координат. Определяют величины dx1 и dz1, на которые нужно сместить систему координат X2Z2 второго датчика по осям системы координат X1Z1 первого датчика соответственно, чтобы совместить начала их координат O1 и O2. А затем определяют, на какой угол U1 нужно повернуть его оси до совмещения с соответствующими осями системы координат первого датчика. Прямые изображения профиля в новой общей системе координат будут ориентированы под разными углами, и угол между этими прямыми (разность углов наклона) будет соответствовать углу, под которым исходные системы координат были ориентированы относительно друг друга. Таким образом становится известна координата положения второго датчика в системе координат первого (координаты dx1 и dz1) и угол отклонения направления его излучения относительно направления первого датчика.
Измерения повторяют последовательно для всех пар оптических датчиков измерительной системы. Причем второй датчик в паре является первым для последующей пары. Датчик Д3, расположенный в начале O3 своей системы координат X3Z3, имеет координаты (dx2; dz2) в системе координат X2Z2. Причем ее положение в системе координат первого датчика уже известно, то есть можно определить положение третьего датчика Д3 в системе датчика Д1 и аналогично определить положение всех остальных датчиков последовательно относительно первого датчика системы. Таким образом аналогично определяют положение каждого из датчиков в системе измерительного устройства относительно одного выбранного первого датчика системы.
При реализации способа по варианту 2 изображение эталонной плоской поверхности, формируемое первым в паре датчиком Д1, корректируют с учетом измерения угла наклона поверхности, проведенного с помощью точного устройства измерения угла (например, оптическим энкодером, установленным на ось вращения объекта). Далее действия способа проводят в соответствии с вариантом 1 способа.
Нахождение угла расхождения и относительного положения двух систем координат может быть осуществлено следующим образом.
Два датчика расположены в разных точках и измеряют одну и ту же прямую n раз, и для каждого положения определяются параметры прямой, измеренной датчиком в собственной системе координат (X1Z1 и X2Z2):
k1(i), b1(i) - коэффициенты прямой, измеренной первым датчиком в паре за измерение номер i,
k2(i), b2(i) - коэффициенты прямой, измеренной вторым датчиком за измерение номер i,
i=1, 2, …, m.
Тогда параметры положения системы координат датчика второго в системе координат первого датчика u, dx и dz (то есть координаты начала системы координат O2 второго датчика и угол наклона U оси Х2 относительно оси X1) могут быть найдены из решения системы уравнений:
Aw=В, где
 ,
,
где параметр U определяется как средний угол наклона между измеренными прямыми
Таким образом, система для m=1 не определена и имеет множество решений, при m=2 система имеет одно решение, а для m>2 переопределена и параметры находятся либо решением системы методом Гаусса, либо как
 , где × - знак матричного умножения, At - транспонированная, а А-1 - обратная матрица, dx=w(1), dz=w(2), u=U.
, где × - знак матричного умножения, At - транспонированная, а А-1 - обратная матрица, dx=w(1), dz=w(2), u=U.
При проведении дополнительной коррекции по варианту 2 осуществления способа коэффициент k1 прямой, получаемой первым датчиком, формируют по измеренному углу наклона прямой грани эталонного объекта относительно ее начального положения, а дальнейшее нахождение координат положения и ориентации датчиков осуществляются, как показано выше.
Таким образом можно определить положение второго датчика в системе координат первого, определить положение третьего датчика последовательно в системе координат второго и первого датчиков и аналогично повторить вычисления для всех датчиков системы для определения их положения относительного одного, первого, датчика.
Способ реализован с использованием датчиков с двумерной приемной матрицей, то есть формируется сразу линия изображения профиля. Установки с такими датчиками, реализующие предлагаемый способ, опробованы в заводских условиях на Установке измерения геометрических параметров труб большого диаметра, запущенной в опытную эксплуатация в цехе «Высота 239» ОАО ЧТПЗ, и показали точность измерения 0,1 мм. Возможно применение способа при использовании других оптических датчиков измерения расстояния до профиля объекта, например лазерных датчиков, посылающих луч в направлении объекта и измеряющих промежуток времени до момента, когда луч вернется обратно. При этом линии изображения профиля формируются из множества измерений датчиков и обрабатываются так же, как при использовании двумерной матрицы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения толщины листовых изделий | 2024 |
|
RU2834575C1 |
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ РАССТОЯНИЙ | 1996 |
|
RU2124700C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПОВЕРХНОСТЕЙ СЛОЖНОПРОФИЛИРОВАННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2243503C2 |
| УСТРОЙСТВО, СИСТЕМА И СПОСОБ ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ РЕЗЬБЫ НА КОНЦЕ ТРУБЫ | 2009 |
|
RU2449244C1 |
| Способ бесконтактного контроля взаимного положения смежных поверхностей двух объектов и устройство для его осуществления | 1986 |
|
SU1366876A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТОЧНОСТИ УСТАНОВКИ СБОРОК ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ В ЯДЕРНОМ РЕАКТОРЕ | 2015 |
|
RU2594173C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИИ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2256575C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ СТАЛЬНОГО ЛИСТА, ДВИЖУЩЕГОСЯ ПО РОЛЬГАНГУ, И ЛАЗЕРНАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2621490C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208370C2 |
| УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ СНАРЯДОВ ОГНЕСТРЕЛЬНОГО ОРУЖИЯ | 1997 |
|
RU2120104C1 |

Способ определения положения объектов относится к оптическим способам определения положения сканирующих датчиков при измерении полного поперечного профиля объекта. В первом варианте реализации способа определения положения оптических датчиков в устройстве контроля замкнутого профиля изделий с использованием формирования датчиками световой линии на его поверхности с последующим получением изображения световой линии и его обработки в устройство вводят эталонный образец с плоской поверхностью, протяженность которой обеспечивает прием сигналов от двух соседних датчиков одновременно. Образец вращают вокруг фиксированной оси в плоскости расположения датчиков устройства и получают изображение световых линий от каждой пары датчиков при нескольких разных положениях плоской поверхности и при каждом ее положении совмещают изображения световых линий двух датчиков и измеряют координаты второго датчика в системе координат первого датчика и измеряют угол между изображением световой линии профиля и осью абсцисс в системе координат датчика, у которой ось ординат совпадает с направлением излучения. По разности измеренных углов для первого и второго датчиков в паре судят о разности их положений. Измерения повторяют последовательно для всех пар датчиков измерительной системы, в которых второй датчик в паре является первым для последующей пары, и таким образом последовательно определяют положения всех оптических датчиков в системе датчиков измерительного устройства, причем положения всех оптических датчиков определяют относительно первого датчика измерительного устройства. Второй вариант реализации способа отличается тем, что положение изображения, измеренного первым датчиком в паре, корректируют с учетом точно измеренного угла наклона поверхности эталонного объекта. Технический результат – повышение точности определения положения датчиков в измерительной системе и, как следствие, возможность учета этого положения при формировании полного профиля объекта из частей, измеренных всеми датчиками измерительной системы. 2 н.п. ф-лы, 2 ил.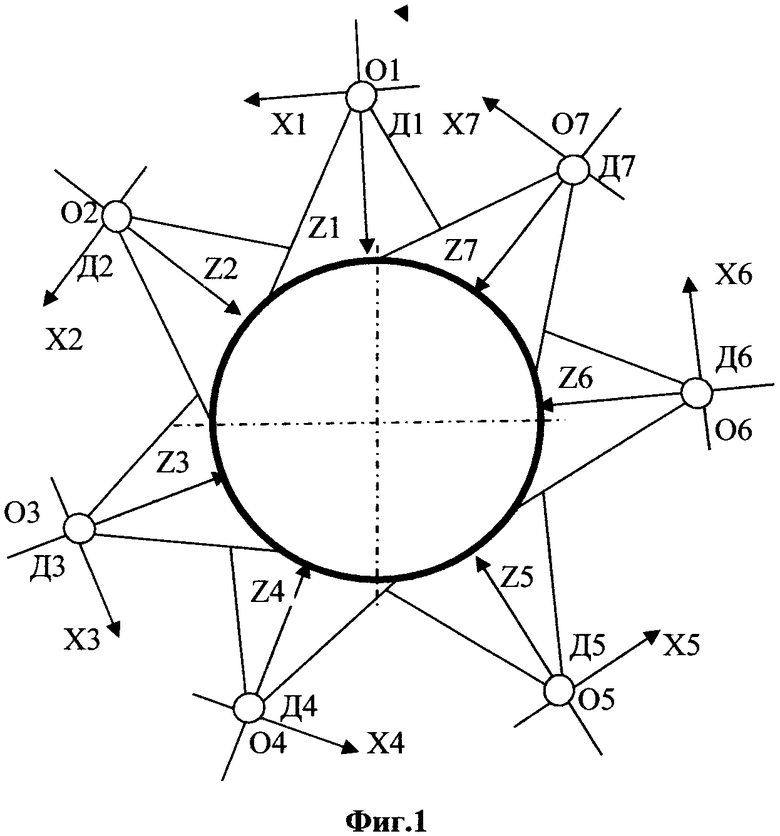
1. Способ определения положения оптических датчиков в устройстве контроля замкнутого профиля изделий с использованием формирования датчиками световой линии на его поверхности с последующим получением изображения световой линии и его обработки, при котором в устройство вводят эталонный образец с плоской поверхностью, протяженность которой обеспечивает прием сигналов от двух соседних датчиков одновременно, образец вращают вокруг фиксированной оси в плоскости расположения датчиков устройства, получают изображение световых линий от каждой пары датчиков при нескольких разных положениях плоской поверхности, при каждом ее положении совмещают изображения световых линий двух датчиков, измеряют координаты второго датчика в системе координат первого датчика и измеряют угол между изображением световой линии профиля и осью абсцисс в системе координат датчика, у которой ось ординат совпадает с направлением излучения, и по разности измеренных углов для первого и второго датчиков в паре судят о разности их положений, и повторяют измерения последовательно для всех пар датчиков измерительной системы, в которых второй датчик в паре является первым для последующей пары, и таким образом последовательно определяют положения всех оптических датчиков в системе датчиков измерительного устройства, причем положения всех оптических датчиков определяют относительно первого датчика измерительного устройства.
2. Способ определения положения оптических датчиков в устройстве контроля замкнутого профиля изделий с использованием формирования датчиками световой линии на его поверхности с последующим получением изображения световой линии и его обработки, при котором в устройство вводят эталонный образец с плоской поверхностью, протяженность которой обеспечивает прием сигналов от двух соседних датчиков одновременно, образец вращают вокруг фиксированной оси в плоскости расположения датчиков устройства, измеряют угол наклона поверхности эталонного образца датчиком угла поворота, получают изображение световых линий от каждой пары датчиков при нескольких разных положениях плоской поверхности, при каждом ее положении совмещают изображения световых линий двух датчиков, измеряют координаты второго датчика в системе координат первого датчика и измеряют угол между изображением световой линии профиля и осью абсцисс в системе координат датчика, у которой ось ординат совпадает с направлением излучения, и по разности измеренных углов для первого и второго датчиков в паре судят о разности их положений, и повторяют измерения последовательно для всех пар датчиков измерительной системы, в которых второй датчик в паре является первым для последующей пары, причем положение изображения, измеренного первым датчиком в паре, корректируют с учетом измеренного угла наклона поверхности эталонного объекта, и таким образом последовательно определяют положения всех оптических датчиков в системе датчиков измерительного устройства, причем положения всех оптических датчиков определяют относительно первого датчика измерительного устройства.
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОФИЛЯ ПОВЕРХНОСТЕЙДЕТАЛЕЙ | 0 |
|
SU238172A1 |
| Способ бесконтактного контроля взаимного положения смежных поверхностей двух объектов и устройство для его осуществления | 1986 |
|
SU1366876A1 |
| Интерферометр для контроля цилиндрических поверхностей | 1984 |
|
SU1226041A1 |
| ВЕРТИКАЛЬНЫЙ КОТЕЛ ДЛЯ ВАРКИ ВОЛОКНИСТОГО МАТЕРИАЛА | 1993 |
|
RU2121537C1 |

