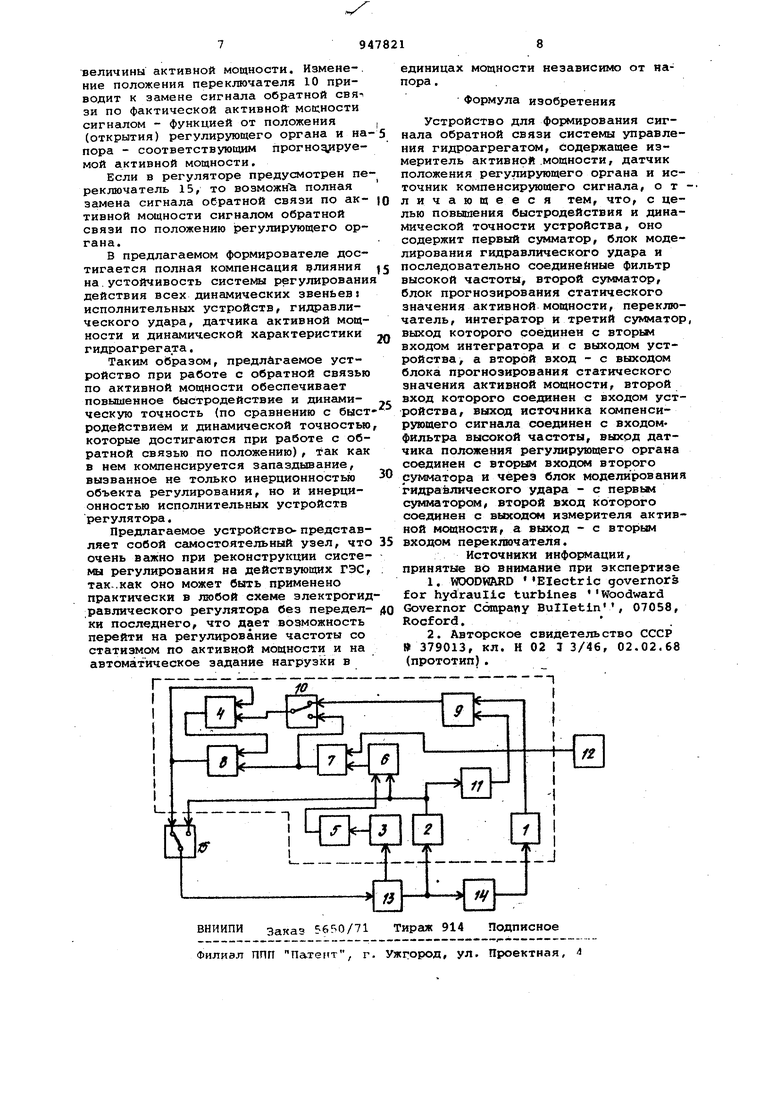
точник компенсирующего сигнала. Для этого регулятора также характерны дв замкнутых контура. Первый - это электрогидравлическая следящая система с обратной связью по положению .регулирующего органа. Второй - это кон-тур, замкнутый обратной связью 6 активной мощности с выхода объекта регулирования на вход исполнительного устройства через измеритель активной мощности и интегратор. Формирователем сигнала обратной связи по активной мощности здесь также является измеритель активной мощности. Второй контур по сравнению с первым более инерционный, так как в нем имеется инерционный объект регулирования и интегратор. Поэтому действующее рассогласование на входе ис полнительного устройства отрабатывается сначала быстродействующим (высо кочастотныи) первым контуром, т.е. п -положению регулирующего органа, и затем корректируется вторым (низкочастотным) контуром по активной мощности. Благодаря этому система регулирования имеет прямолинейную статическую характеристику/ не зависящую от на;пора, при минимальном времени отработки главной части действующего рассогласования 1123. Недостатком этого регулятора является динамическая ошибка системы регулирования , обусловленная инерционностью формирования сигнала обратной связи по активной мощности. При этом нельзя свести эту инерционность к минимуму, обусловленному свойствами исполнительных устройств регулятора и объекта регулирования, так как нельзя уменьшить ниже некото рого предела постоянную времени интегратора из-за появления перерегулирования, угрожающего устойчивости системы. Цель изобретения - создание формирователя сигнала обратной связи по активной мощности, обеспечивающего наибольшее быстродействие и высокую динамическую точность системы регулирования за счет компенсации запаздывания управляющих сигналов в звеньях объекта регулирования, а так же в звеньях исполнительных устройст регулятора при сохранении статическо точности и устойчивости регулировани Иными словами, предлагается форми рователь обратной связи по мощности действия которого обеспечивает такие же динамические свойства системы ре гулирования, как и действие обратно связи по положению (открытюо) регулирующего органа,, но в то же время дает прямолинейную не зависящую от напора статическую характеристику агрегата по мощности, чего невозмож но достигнуть при отработке управляю щих воздействий по открытию. Поставленная цель достигается тем, что устройство дополнительно содержит первый сумматор, блок моделирования гидравлического удара и последовательно соединенные фильтр высокой частоты, второй сумматор, блок прогнозирования статического значения активной мощности, переключатель, интегратор и третий сумматор, выход которого соединен с вторым входом интегратора и с выходом устройства, а второй вход - с выходом блока прогнозирования статического значения активной мощности, второй вход которого соединен с входсм устройства, выход источника компенсирующего сигнала соединен с входом фильтра высокой частоты, выход датчика положения регулирующего органа соединен с вторым входом второго сумматора и через блок моделирования гидравлического удара - с первым сумматором, второй вход которого соединен с выходом измерителя активной мощности., а выход с вторым контактом переключателя. На чертеже представлена функцио aльнaя схема устройства формирования сигнала обратной связи. Устройство включает измеритель 1 активной мощности, датчик 2 положения регулирующего органа, источник 3 компенсирующего сигнала, интегратор 4, фильтр 5 высокой частоты, сумматоры 6-9, блок 7 прогнозирования статического значения активной мощности, первый переключатель 10, блок 11 моделирования гидравлического улара, датчик 12 напора ГЭС, регулятор 13, объект 14 регулирования, второй переключатель 15. Отдельные блоки устройства выполняют следующие функции. Согласованный фильтр, реализованный на игтеграторе 4 и сумматоре 8, представляет собой сумматор сигналов, включенных на его входы интегрирующего и дифференцирующего звеньев и имеет по низкочастотному (первому) входу сумматора 8 передаточную функциюJ-н. т7Я. а по высокочастотному .(второму) входу сумматора 8 передатЬчную функцию Ь.ч. Тр+1 Под высокой частотой в согласован;ном Фильтре понимается частота ии , удовлетворяющая неравенству u;7i/T, так как при выполнении этого условия коэффициент передачи сигнала по высокочастотному входу лежит в предeлak 0,7-1, т.е. эти.частоты принадлежат полосе пропускания высокочастотного входа. Этот согласованный фильтр используется для замены в области высоких частот сигнала фактической активной мощности, имеющего боль-. шие динамические погрешности, сигналом прогнозируемой активной мощности, формируемым безьшерционно в функции от открытия и напора. Блок 11 моделирования гидравлического удара в общем случае представляет нелинейный фильтр высокой частоты, передаточная функция которого определяется из следующих сооб ражений . При жесткой связи генератора с системой регулирования электрическая мощность, отдаваемая в сеть при перемещении регулирующего органа, совпадает численно с моментом, развиваешлм-гидравлической турбиной,ко торый следующим образом может быть представлен в функции от перемещени регулирующего органа: NW-K,tPV4-y v,CP), Так как Т может достигать велич ны 3-4 с, то величину постоянной вре мени согласованного фильтра, реализованного на интеграторе и сумматоре 8, в этом случае не удается установи менее 15 с. При уменьшении постоянной времени этого фильтра и большом возмущении может наблюдаться колеба тельность переходного процесса, обус ловленная влиянием гидравлического удара. Поэтшлу к сигналу датчика ак тивной мощности добавляется сигнал блока 11, имеющего передаточную фун цию V, (р).к Р . uoeiv P что позволяет получить сигнал активной мощности с исключением вредной для устойчивости динс1Мической добавки от действия гидравлического удара В этом случае выбор постоянной времени согласованного фильтра осуществляется таким образом, чтобы не допустить влияния синхронных качаний мощности гидрогенератора на движение регулирующих орга.нов турбины, а также не допустить набора (сброса) мощности агрегата при отключении (включении) потребителей. Диапазон настройки постоянной вре мени фильтра расширяется в сторону малых постоянных времени до 1 с с сохранением устойчивости контура мощ ности. Таким образом, введение блока 11 расширяет диапазон настройки согласованного фильтра. Блок 11, кроме того, не обладая запаздыванием в области частот синхронных качаний гене ратора и фильтра измерителя активной мощности и обладая в этой области частот значительно большим усилением чем тракт сигнала электрической акти ности мощности, шунтирует последний в области высоких частот, что полностью исключает возникновение колебаний из-эа динамических характеристик цепи обратной связи по активной электрической мощности генератора. Источник 3 компенсирующего сигнала через фильтр - 5 высокой частоты и сумматор 6 кстпенсирует запаздывание сигнала датчика 2 положения регулирующего органа, .вызванное инерцион-ностью исполнительных устройств регулятора. Источником компенсирующего сигнала обычно является какой-либо элрмент системы регулирования, находящейся до инерционной части регулятора. Для турбин с одним регулирующим органом датчик 2 положения регулирующего органа (датчик открытия направляющего аппарата) одномерный, в турбинах с двумя регулирующими органами датчик 2 - двумерный датчик. Блок 7 прогнозирования статического значения активной мощности по открытию и напору, величина которого подается на вход устройства с датчика 12 напора ГЭС, представляет собой двухкоординатный нелинейный блок в случае турбины с одним регулирующим органом и трехкоординатный нелинейный блок в случае турбины с двумя регулирующими органами. Действие формирователя заключается в следующем. При движении регулирующих органов турбины сигнал от датчиков 2 положения поступает на блок 7 прогнозирования статического значения активной мощности. Блок 7 осуществляет выработку сигнала прогнозируемой мощности для данного агрегата в соответствии с зависимортыо Р P(Y,H), где Р - активная мощность агрегата Y - ход главного сервомотора, определяющего положение; регулирующих органов; Н - напор. Этот сигнал проходит через вход высокой частоты фильтра, реашизованного на интеграторе 4 и сумматоре 8, и осуществляет выключение движения регулирующих органов. В момент остановки регулирующих органов значение фактической мощности изменяется за счет изменения давления в водоводе, однако блок 11 моделирования действия гидроудара обеспечивает с момента остановки регулирующих органов пр актически постоянство сигнала на выходе сумматора 9. Данное положение переключателя 10 соответствует нормальной работе формирователя с учете действия гидравлического удара и фактической величины активной мощности. Измене-, ние положения переключателя 10 приводит к замене сигнала обратной свя-v зи по фактической активной мой:ности сигналом - функцией от положения (открытия) регулирующего органа и на пора - соответствующим прогно руемой активной мощности. Если в регуляторе предусмотрен пе реключатель 15, то возможна полная замена сигнала обратной связи по активной мощности сигналом обратной связи по положению регулирующего органа. В предлагаемом формирователе достигается полная компенсация влияния на.устойчивость системы регулировани действия всех динамических звеньев: исполнительных устройств, гидравлического удара, датчика активной мощности и динамической характеристики гидроагрегата. Таким образом, предлагаемое устройство при работе с обратной связью по активной мощности обеспечивает повышенное быстродействие и динамическую точность (по сравнению с быст родействиём и динамической точностью которые достигаются при работе с обратной связью по положению), так как в нем компенсируется запаздывание, вызванное не только инерционностью объекта регулирования, но и инерционностью исполнительных устройств регулятора. Предлагаемое устройство- представляет собой самостоятельный узел, что очень важно при реконструкции системы регулирования на действующих ГЭС, так..как оно может быть применено практически в любой схеме электрогид равлического регулятора без переделки последнего, что дает возможность перейти на регулирование частоты со статизмом по активной мощности и на автоматическое задание нагрузки в единицах мощности независикю от напора . Формула изобретения Устройство для формирования сигнала обратной связи системы управления гидроагрегатом, содержащее измеритель активной .мощности, датчик положения регулирующего органа и источник компенсирующего сигнала, отличающееся тем, что, с целью повышения быстродействия и динамической точности устройства, оно содержит первый сумматор, блок моделирования гидравлического удара и последовательно соединейиые фильтр высокой частоты, второй сумматор, блок прогнозирования статического значения активной мощности, переключатель, интегратор и третий сумматор, выход которого соединен с вторьм входом интегратора и с выходом устройства, а второй вход - с выходом блока прогнозирования статического значения активной мощности, второй вход которого соединен с входом устройства, выход источника компенсирующего сигнала соединен с входомфильтра высокой частоты, выход датчика положения регулирующего органа соединен с вторым входом второго сумматора и через блок моделирования гидравлического удара - с первым сумматором, второй вход которого соединен с выходом измерителя активной мощности, а выход - с вторым входом переключателя. Источники инфОЕЯлации, принятые во внимание при экспертизе 1.vroODWARD Electric governors for hydraulic turbines Woodward Governor Страну Bulletin, 07058, Rocford, 2.Авторское свидетельство СССР №379013, кл. И 02 3 3/46, 02.02.68 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматической коррекции характеристик регулятора частоты электроэнергетического агрегата | 1981 |
|
SU1035769A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| СПОСОБ УПРАВЛЕНИЯ МОЩНОСТЬЮ РЕАКТИВНЫХ ГИДРАВЛИЧЕСКИХ ТУРБИН | 2017 |
|
RU2636603C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОМЕРНЫМ ОБЪЕКТОМ | 2000 |
|
RU2172419C1 |
| Электрогидравлический регулятор частоты вращения и мощности электроэнергетического агрегата | 1977 |
|
SU868963A1 |
| Способ управления двухбарабанным ленточным конвейером | 1984 |
|
SU1286474A1 |
| Способ автоматического регулирования частоты вращения ротора синхронного генератора и регулятор для его реализации | 2023 |
|
RU2823536C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МОЩНОСТЬЮ ГИДРОАГРЕГАТА ГЭС | 2024 |
|
RU2830453C1 |
| Регулятор электрической мощности переменного тока(его варианты) | 1981 |
|
SU983690A1 |
