ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к станку с числовым программным управлением, в частности к станку с числовым программным управлением с возможностью точного определения положения инструмента для обработки заготовки.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] Станок с числовым программным управлением представляет собой станок, управляемый устройством числового программного управления, и называется также станком с ЧПУ. Устройство числового программного управления содержит командный механизм на основе вычислительного устройства, подающий команды на движение инструмента, механизм, определяющий, движется ли инструмент в соответствии с командой, и механизм, сравнивающий заданное значение с зарегистрированным значением и автоматически исправляющий ошибку, если заданное значение и зарегистрированное значение различаются.
[0003] Команда об обработке заготовки, скорость резки и вид или размер режущего инструмента, представляющие собой условия обработки заготовки, анализируются как символы, выраженные конкретными числами в соответствии со схемой обработки. При вводе данных символов в управляющее устройство подается команда инструменту на работу в соответствии с командой, то есть автоматическую резку заготовки.
[0004] Станки с числовым программным управлением, которые могут быть предназначены для производства различных деталей, могут использоваться для фрезеровки кулачков на фрезерном станке или автоматического определения позиции пробивки при работе на сверлильном станке. В последние годы метод числового программного управления стал использоваться также на токарных станках и, таким образом, получил более широкое распространение. По мере развития полупроводниковых технологий и компьютеров стали появляться станки с числовым программным управлением, осуществляемым встроенным компьютером - станки с ЧПУ типа CNC (computerized numerical control).
[0005] Примеры станков с ЧПУ типа CNC в соответствии с предшествующим уровнем техники раскрыты в патентной заявке Кореи №1996-0013171 (здесь и далее именуемой «Предшествующий документ 1») и патентной заявке Кореи №2009-0032675 (здесь и далее именуемой «Предшествующий документ 2»).
[0006] В Предшествующем документе 1 раскрыт токарный станок с ЧПУ типа CNC, в котором шпиндель главного вала для обработки заготовок перемещается по вертикали и горизонтали для автоматического определения положения зажимного патрона для обработки заготовки. В соответствии с данной заявкой устанавливают две горизонтально расположенные направляющие для горизонтального перемещения шпинделя главного вала. Две направляющие расположены на некотором расстоянии по вертикали друг от друга. Задняя поверхность главного шпинделя соединена с двумя направляющими с возможностью относительного перемещения.
[0007] В соответствии с Предшествующим документом 1 в станке с ЧПУ типа CNC, имеющем вышеописанную конструкцию, только задняя поверхность шпинделя главного вала опирается на направляющие, в то время как передняя его сторона не опирается на направляющие. Таким образом, когда шпиндель основного вала перемещается в горизонтальном направлении, нагрузка может концентрироваться в его передней части, что может препятствовать плавному перемещению. Как следствие, может быть сложно точно определить положение режущего инструмента.
[0008] В Предшествующем документе 2 раскрыт токарный станок с ЧПУ типа CNC, имеющий три приводных узла, которые установлены с возможностью вертикального перемещения для автоматического определения положения режущего инструмента для обработки заготовки. В соответствии с данной заявкой, на передней поверхности опорного элемента устанавливаются две вертикальные направляющие для вертикального перемещения трех приводных узлов. Две направляющие расположены на некотором расстоянии по горизонтали друг от друга. Задняя поверхность подвижного элемента, на которой установлены три приводных узла, соединена с двумя направляющими с возможностью относительного перемещения.
[0009] В соответствии с Предшествующим документом 2, в станке с ЧПУ типа CNC, имеющем вышеописанную конструкцию, только обратная сторона подвижного элемента опирается на направляющие, в то время как передняя его сторона не опирается на направляющие, как и в Предшествующем документе 1. Таким образом, когда подвижный элемент перемещается в вертикальном направлении, нагрузка может концентрироваться в передней части, что может препятствовать плавному перемещению. Как следствие, может быть сложно точно определить положение режущего инструмента.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ ТЕХНИЧЕСКАЯ ПРОБЛЕМА
[0010] Целью настоящего изобретения является решение вышеописанных распространенных проблем путем разработки станка с числовым программным управлением, в котором предотвращается концентрация нагрузки опорного элемента, установленного с возможностью перемещения для управления положением инструмента, в одном направлении, и, таким образом, обеспечивается плавное перемещение опорного элемента и точное определение положения инструмента.
ТЕХНИЧЕСКОЕ РЕШЕНИЕ
[0011] Станок с числовым программным управлением, являющийся воплощением настоящего изобретения, содержит: первый опорный элемент, установленный на основной раме с возможностью перемещения влево/вправо; а также первый, второй и третий горизонтальные направляющие рельсы, установленные на основной раме в левом/правом направлении, при этом первый, второй и третий горизонтальные направляющие рельсы соответственно соединены с двумя точками задней поверхности и одной точкой передней поверхности первого опорного элемента для управления перемещением первого опорного элемента.
[0012] Первый и второй горизонтальные направляющие рельсы могут быть установлены на расстоянии по вертикали друг от друга на задней поверхности первого опорного элемента, а третий горизонтальный направляющий рельс может быть установлен на передней поверхности первого опорного элемента.
[0013] Третий горизонтальный направляющий рельс может быть расположен по высоте между первым и вторым горизонтальными направляющими рельсами.
[0014] Первый приводной узел, содержащий первый приводной двигатель и первый ведущий винт для перемещения первого опорного элемента, может быть расположен между первым и вторым направляющими рельсами, при этом первый ведущий винт может быть расположен в центре линии, соединяющей ведущие центры первого и второго горизонтальных направляющих рельсов, а третий горизонтальный направляющий рельс может быть расположен на линии, перпендикулярной к центру линии, соединяющей ведущие центры первого и второго горизонтальных направляющих рельсов.
[0015] Линия, соединяющая ведущие центры первого и третьего горизонтальных направляющих рельсов, и линия, соединяющая ведущие центры второго и третьего горизонтальных направляющих рельсов, могут иметь одинаковую длину.
[0016] Станок с числовым программным управлением, кроме того, может содержать: второй опорный элемент, установленный на первом опорном элементе с возможностью вертикального перемещения; а также первый, второй и третий вертикальные направляющие рельсы, установленные на втором опорном элементе в вертикальном направлении, при этом первый, второй и третий вертикальные направляющие рельсы соответственно соединены с тремя точками первого опорного элемента и обеспечивают подъем второго опорного элемента относительно первого опорного элемента.
[0017] Первый и второй вертикальные направляющие рельсы могут быть установлены напротив друг друга на обеих боковых сторонах второго опорного элемента, а третий вертикальный направляющий рельс может быть установлен на передней поверхности второго опорного элемента.
[0018] Второй приводной узел, содержащий второй ведущий винт, соединенный винтовым соединением с задней поверхностью второго опорного элемента и обеспечивающий вертикальное перемещение второго опорного элемента, а также второй приводной двигатель для привода второго ведущего винта, может быть установлен в центре задней поверхности второго опорного элемента в вертикальном направлении, а третий вертикальный направляющий рельс и второй ведущий винт могут быть расположены параллельно другу на противоположных поверхностях второго опорного элемента.
ПОЛЕЗНЫЙ ЭФФЕКТ ИЗОБРЕТЕНИЯ
[0019] Станок с числовым программным управлением, являющийся воплощением настоящего изобретения, может иметь следующие полезные эффекты.
[0020] Во-первых, поскольку две точки задней поверхности и одна точка передней поверхности первого опорного элемента, установленного с возможностью перемещения влево/вправо, соединены с возможностью относительного перемещения с первым, вторым и третьим горизонтальными направляющими рельсами, нагрузка первого опорного элемента может быть перемещена на третий горизонтальный направляющий рельс для минимизации смещения первого и второго горизонтальных направляющих рельсов из-за нагрузки от первого опорного элемента.
[0021] В частности, первый ведущий винт может быть расположен в центре линии, соединяющей ведущие центры первого и второго горизонтальных направляющих рельсов, а третий горизонтальный направляющий рельс может быть расположен по высоте между первым и вторым горизонтальными направляющими рельсами. В данном случае, третий горизонтальный направляющий рельс может быть расположен на линии, перпендикулярной к центру линии, соединяющей первую и вторую горизонтальные линии. Таким образом, при вращении первого ведущего винта статический дисбаланс, сообщаемый третьему горизонтальному направляющему рельсу, может быть ограничен, за счет чего обеспечивается плавное перемещение первого опорного элемента. Таким образом, обеспечивается возможность точного регулирования положения рабочего органа станка для обработки заготовки.
[0022] Во-вторых, поскольку три точки первого опорного элемента и первый, второй и третий вертикальные направляющие рельсы, расположенные на втором опорном элементе, взаимно соединены с возможностью относительного перемещения, сводится к минимуму возможность отклонения второго опорного элемента влево/вправо и вперед/назад, которое может иметь место при горизонтальном движении первого опорного элемента относительно положения второго опорного элемента, за счет чего обеспечивается точное и плавное вертикальное перемещение второго опорного элемента.
[0023] В частности, если третий вертикальный направляющий рельс расположен параллельно второму ведущему винту и напротив него по отношению ко второму опорному элементу, статический дисбаланс, сообщаемый первому и второму вертикальным направляющим рельсам под воздействием третьего вертикального направляющего рельса при вращении второго ведущего винта, может быть ограничен, за счет чего обеспечивается плавное перемещение первого опорного элемента. Таким образом, обеспечивается возможность точного регулирования положения инструмента для обработки заготовки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
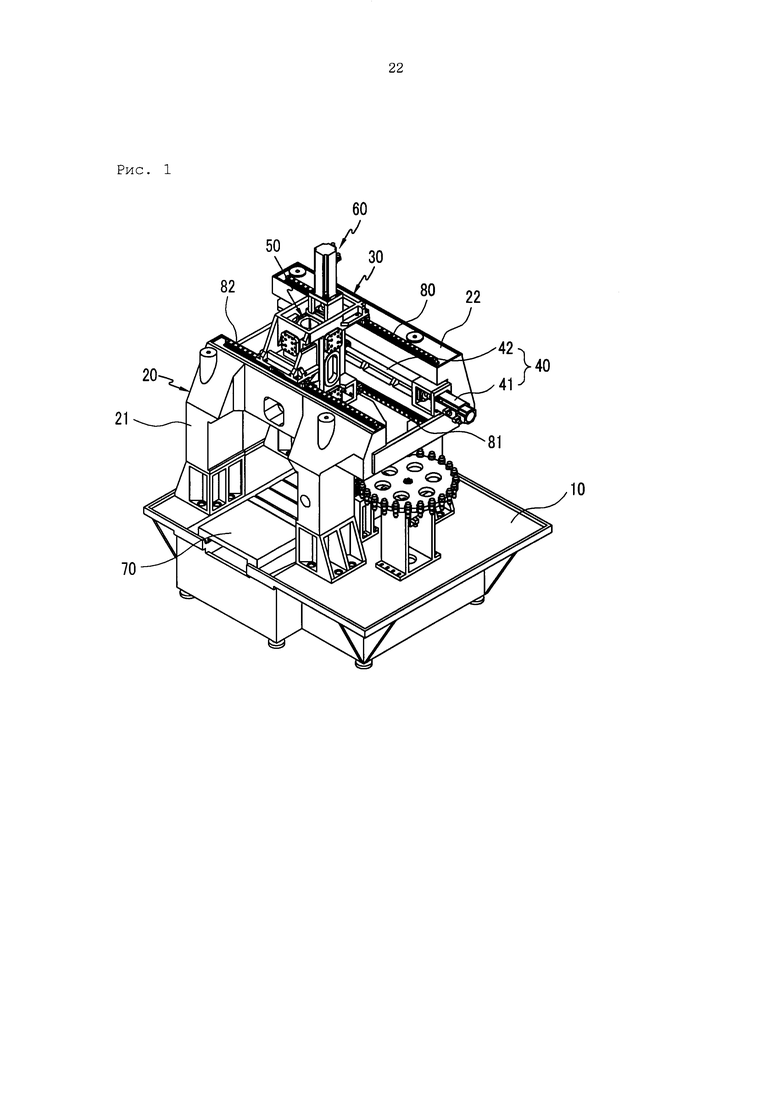
[0024] На рис. 1 представлен вид в перспективе станка с числовым программным управлением в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
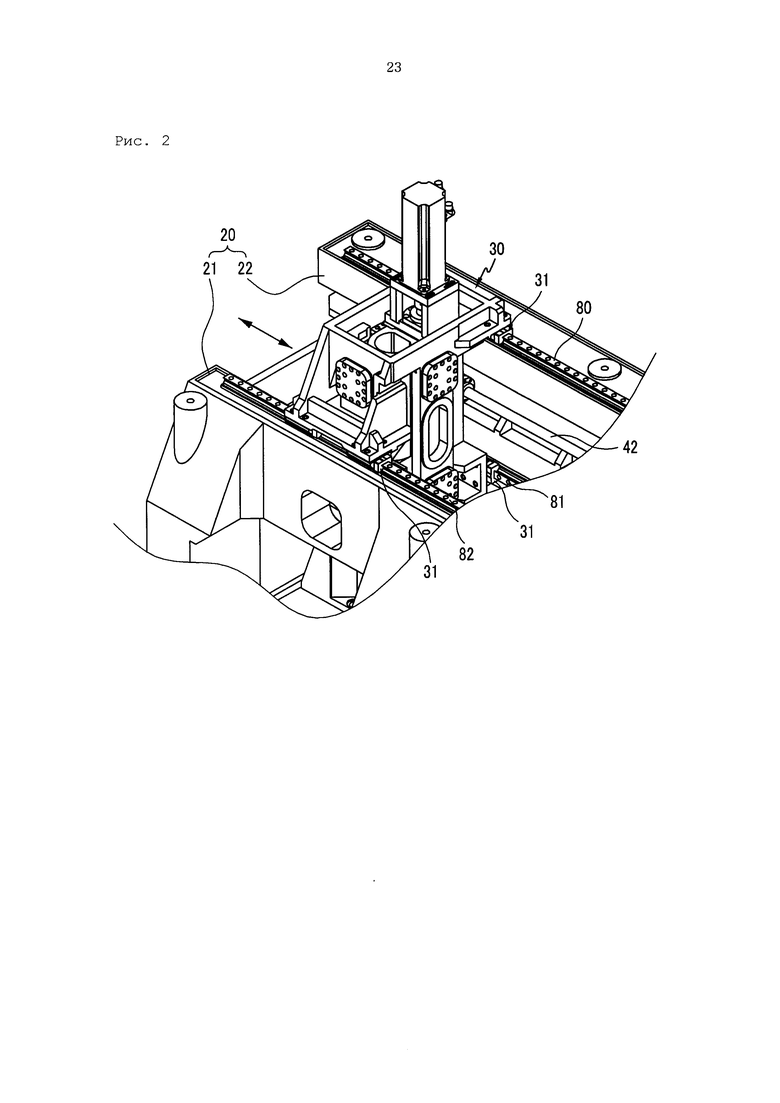
[0025] На рис. 2 представлен вид в перспективе, показывающий состояние, при котором первый опорный элемент установлен на верхней раме.
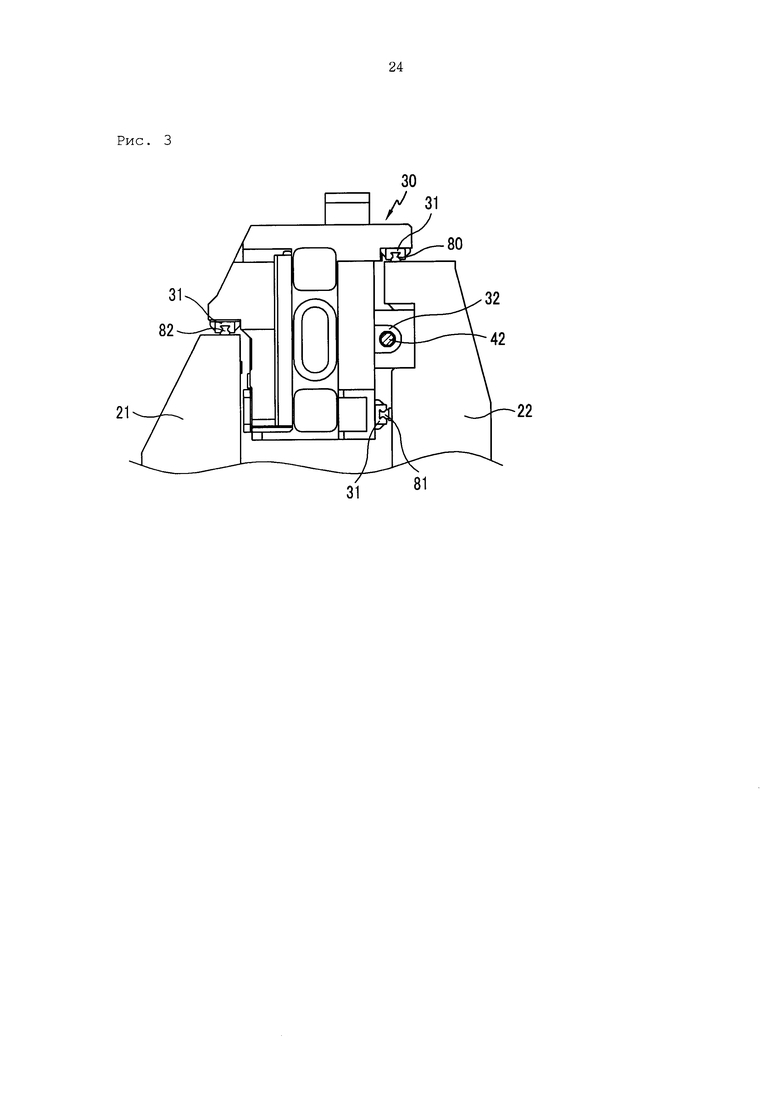
[0026] На рис. 3 представлен вид, иллюстрирующий взаимное расположение первого опорного элемента, горизонтального направляющего рельса и первого ведущего винта.
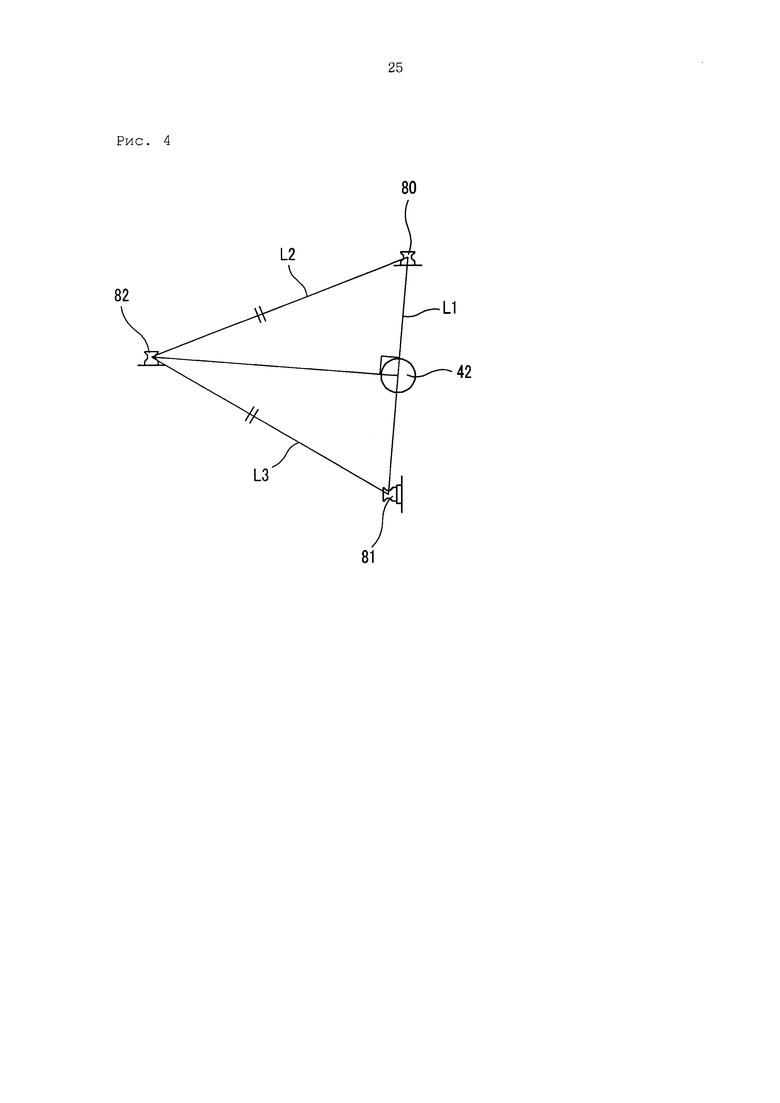
[0027] На рис. 4 представлен вид, иллюстрирующий взаимное расположение первого, второго и третьего горизонтальных направляющих рельсов и первого ведущего винта.
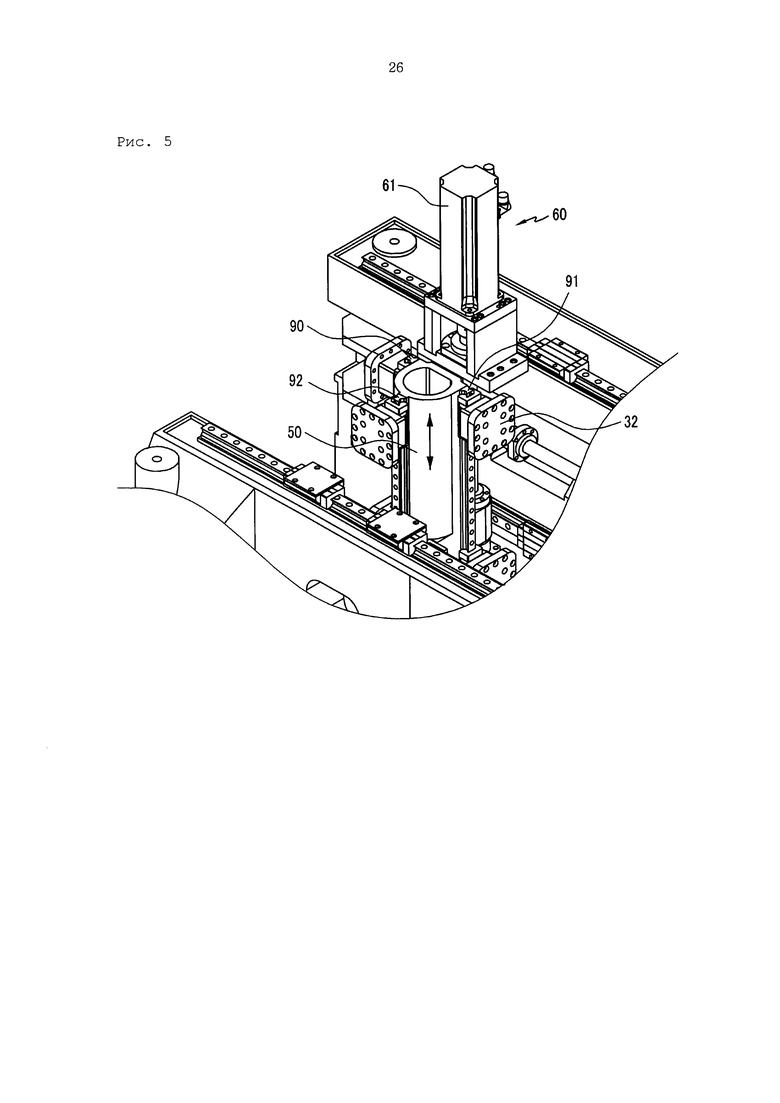
[0028] На рис. 5 представлен увеличенный вид в перспективе, иллюстрирующий состояние, при котором второй опорный элемент установлен на первом опорном элементе.
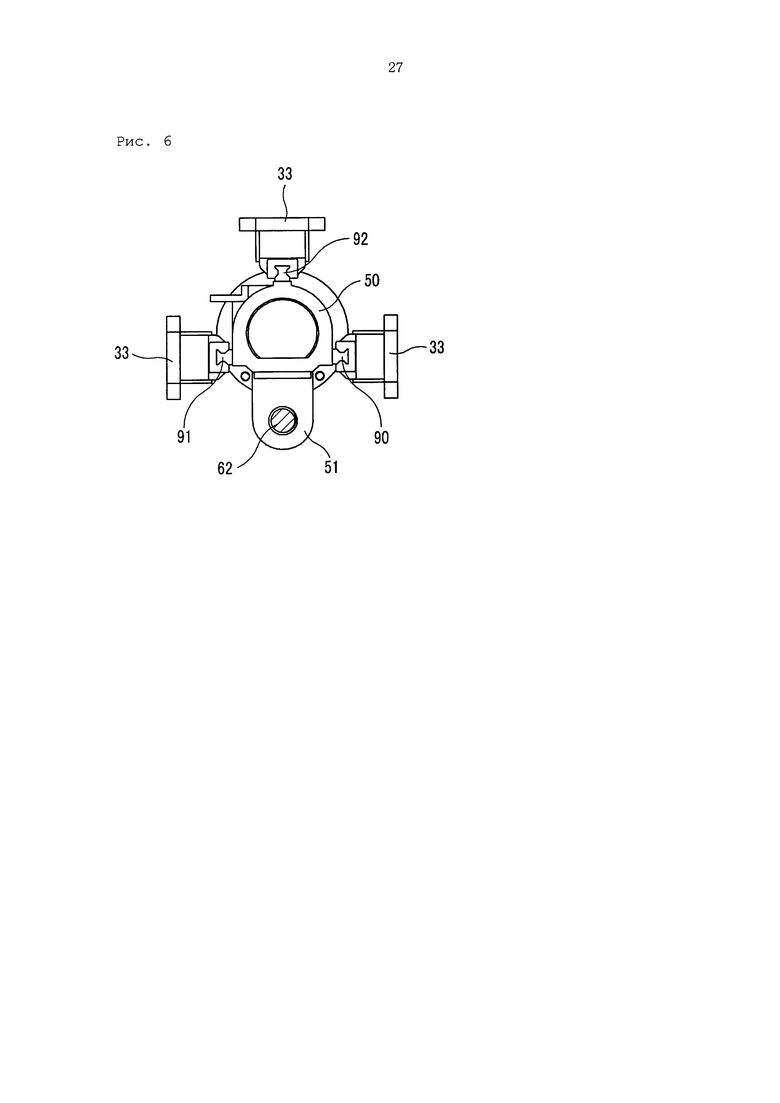
[0029] На рис. 6 представлен вид, иллюстрирующий взаимное расположение второго опорного элемента, вертикального направляющего рельса и второго ведущего винта.
ТЕХНИЧЕСКОЕ ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0030] Ниже будет подробно раскрыта конструкция станка с числовым программным управлением в соответствии с настоящим изобретением со ссылкой на прилагаемые чертежи.
[0031] На рис. 1 представлен вид в перспективе станка с числовым программным управлением в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
[0032] Станок с числовым программным управлением в соответствии с настоящим изобретением содержит нижнюю раму 10, верхнюю раму 20, первый опорный элемент 30, первый приводной узел 40, второй опорный элемент 50, второй приводной узел 60, а также рабочий стол 70.
[0033] Нижняя рама 10 имеет плоскую верхнюю поверхность. Рабочий стол 70 устанавливается на верхней поверхности нижней рамы 10 с возможностью перемещения по направляющему рельсу (не показан).
[0034] На верхней поверхности нижней рамы 10 устанавливается верхняя рама 20, на которую устанавливаются первый опорный элемент 30, первый приводной узел 40, второй опорный элемент 50 и второй приводной узел 60. Верхняя рама 20 состоит из двух опор 21 и 22, которые расположены на определенном расстоянии друг от друга, что обеспечивает возможность размещения вышеописанных элементов. Передняя опора 21, расположенная на передней стороне, может иметь меньшую высоту, чем задняя опора 22, расположенная на задней стороне. Передняя опора 21 и задняя опора 22 расположены на заранее заданном расстоянии друг от друга. Первый опорный элемент 30 расположен между передней опорой 21 и задней опорой 22 с возможностью перемещения влево и вправо.
[0035] Первый опорный элемент 30 устанавливается на верхней раме с возможностью перемещения влево и вправо. Две точки задней поверхности и одна точка передней поверхности первого опорного элемента 30 могут быть соединены с возможностью относительного перемещения, соответственно, с первым, вторым и третьим горизонтальными направляющими рельсами, расположенными на верхней раме 20.
[0036] Первый приводной узел 40 устанавливается на передней поверхности задней опоры 22, между двумя опорами 21 и 22, составляющими верхнюю раму 20, и обеспечивает возможность бокового перемещения первого опорного элемента 30,
приводимого в движение первым приводным узлом 40. Первый приводной узел 40 содержит первый приводной двигатель 41 и первый ведущий винт 42, соединенный посредством муфты с первым приводным двигателем 41 и соединенный посредством винтового соединения с первым соединительным элементом 33 (который будет описан ниже), расположенным на задней поверхности первого опорного элемента 30 вне первого приводного двигателя 41.
[0037] Второй опорный элемент 50 установлен на первом опорном элементе 30 с возможностью вертикального перемещения. Инструмент для обработки заготовок (не показан) устанавливается в нижней части второго опорного элемента 50.
[0038] Второй приводной узел 60, установленный на задней поверхности первого опорного элемента 30, обеспечивает вертикальное перемещение второго опорного элемента 50, приводимого в движение вторым приводным узлом 60.
[0039] Рабочий стол 70 установлен на верхнюю поверхность нижней рамы 10, а заготовка устанавливается на верхнюю поверхность рабочего стола 70. Рабочий стол 70 установлен с возможностью перемещения вперед и назад и приводится в движение третьим приводным узлом (не показан).
[0040] На рис. 2 представлен увеличенный вид в перспективе, иллюстрирующий состояние, при котором первый опорный элемент установлен на верхней раме, на рис. 3 представлен вид, иллюстрирующий взаимное расположение первого опорного элемента, горизонтального направляющего рельса и первого ведущего винта, а на рис. 4 представлен вид, иллюстрирующий взаимное расположение первого, второго и третьего горизонтальных направляющих рельсов и первого ведущего винта.
[0041] Первый, второй и третий горизонтальные направляющие рельсы 80, 81 и 82, обеспечивающие перемещение влево/вправо первого опорного элемента 30, установлены на двух опорах 21 и 22, образующих верхнюю раму 20. Как описано выше, высота верхней поверхности задней опоры 22 больше, чем высота верхней поверхности передней опоры 21.
[0042] На верхней поверхности задней опоры 22 установлен первый горизонтальный направляющий рельс 80, при этом верхняя поверхность первого горизонтального направляющего рельса 80 расположена выше верхней поверхности задней опоры 22. Второй горизонтальный направляющий рельс 81 установлен на заранее заданном расстоянии от первого горизонтального направляющего рельса 80 на передней поверхности задней опоры 22, при этом верхняя поверхность второго горизонтального направляющего рельса 81 обращена к передней стороне. Второй горизонтальный направляющий рельс 81 расположен на первом горизонтальном направляющем рельсе 80. Третий горизонтальный направляющий рельс 82 установлен на верхней поверхности передней опоры 21, при этом верхняя поверхность третьего горизонтального направляющего рельса 82 расположена выше верхней поверхности передней опоры 21.
[0043] Подвижные детали 31, соединенные с возможностью относительного перемещения с горизонтальными направляющими рельсами 80, 81, и 82, расположены в двух точках задней поверхности и в одной точке передней поверхности первого опорного элемента 30.
[0044] Подвижная деталь 31, соединенная с третьим горизонтальным направляющим рельсом 82, может поддерживать первый опорный элемент 30, при этом нагрузка концентрируется в передней части, что обеспечивает стабильное положение первого опорного элемента 30.
[0045] Первый ведущий винт 42 расположен в центре линии L1, соединяющей ведущий центр первого горизонтального направляющего рельса 80 с ведущим центром второго горизонтального направляющего рельса 81. Кроме того, третий горизонтальный направляющий рельс 82 расположен по высоте между первым горизонтальным направляющим рельсом 80 и вторым горизонтальным направляющим рельсом 81. Предпочтительно, третий горизонтальный направляющий рельс 82 расположен на линии, перпендикулярной к центру линии L1, соединяющей первый горизонтальный направляющий рельс 80 и второй горизонтальный направляющий рельс 81. Предпочтительно, линия L2, соединяющая ведущие центры первого горизонтального направляющего рельса 80 и третьего горизонтального направляющего рельса 82, и линия L3, соединяющая ведущие центры второго горизонтального направляющего рельса 81 и третьего горизонтального направляющего рельса 82, имеют одинаковую длину. Таким образом, треугольник, образованный линиями L1, L2 и L3, соединяющими ведущие центры горизонтальных направляющих рельсов 80, 81 и 82, может представлять собой равнобедренный треугольник. За счет этого статический дисбаланс, сообщаемый первому горизонтальному направляющему рельсу 80 и второму горизонтальному направляющему рельсу 81 моментом силы, производимым третьим горизонтальным направляющим рельсом 82 при вращении первого ведущего винта 41, может быть ограничен, что обеспечивает плавное перемещение. Таким образом, обеспечивается возможность точного регулирования положения инструмента для обработки заготовки.
[0046] Первый ведущий винт 42 соединен с первым приводным двигателем 41 посредством муфты, а первый соединительный элемент 32, расположенный на задней поверхности первого опорного элемента 30, соединен с внешней частью первого ведущего винта 42 посредством винтового соединения. Таким образом, при работе первого приводного двигателя 41 первый опорный элемент 30 перемещается в боковом направлении, при этом возможность вращения первого ведущего винта ограничена.
[0047] На рис. 5 представлен увеличенный вид в перспективе, иллюстрирующий состояние, при котором второй опорный элемент установлен на первом опорном элементе, а на рис. 6 представлен вид, иллюстрирующий взаимное расположение второго опорного элемента, вертикального направляющего рельса и второго ведущего винта.
[0048] Установочное пространство для вертикальной установки второго опорного элемента 50 предусмотрено в первом опорном элементе 30. Множество направляющих 33, соединенных с возможностью относительного перемещения с вертикальными направляющими рельсами 90, 91 и 92, которые будут описаны ниже, установлены в установочном пространстве.
[0049] Второй опорный элемент 50, рассматриваемый в плоскости, имеет полость и плоскую заднюю поверхность. Кроме того, второй опорный элемент 50 имеет изогнутую переднюю поверхность и две изогнутые боковые поверхности.
[0050] Вертикальные направляющие рельсы 90, 91 и 92, предназначенные для перемещения второго опорного элемента 50 в вертикальном направлении, установлены на боковых поверхностях и на передней поверхности второго опорного элемента 50 в вертикальном направлении.
[0051] Первый и второй вертикальные направляющие рельсы 90 и 91 устанавливаются на боковых поверхностях второго опорного элемента 50 напротив друг друга. За счет этого предотвращается горизонтальное движение из-за изменения высоты второго опорного элемента 50, которое может происходить при горизонтальном движении первого опорного элемента 30.
[0052] Третий вертикальный направляющий рельс 92 установлен на передней поверхности второго опорного элемента 50. За счет этого предотвращается движение вперед и назад из-за изменения центра тяжести второго опорного элемента 50, которое может происходить при вертикальном перемещении второго опорного элемента 50.
[0053] Второй приводной узел 60 устанавливается в центре задней поверхности второго опорного элемента 50. Второй приводной узел 60 содержит второй приводной двигатель 61 и второй ведущий винт 62, соединенный посредством муфты с первым приводным двигателем 61 и соединенный посредством винтового соединения с первым соединительным элементом 51, расположенным на задней поверхности второго опорного элемента 50 вне второго приводного двигателя 61. В данном случае, второй ведущий винт 62 расположен в центре задней поверхности второго опорного элемента 50, а третий вертикальный направляющий рельс 92 расположен в центре передней поверхности второго опорного элемента 50. Третий горизонтальный направляющий рельс 92 и второй ведущий винт 62 расположены параллельно другу по разные стороны второго опорного элемента 50.
[0054] Когда третий вертикальный направляющий рельс 92 расположен параллельно второму ведущему винту 62 и напротив него, как описано выше, статический дисбаланс, сообщаемый первому вертикальному направляющему рельсу 90 и второму вертикальному направляющему рельсу 91 под воздействием момента силы третьего вертикального направляющего рельса 92 при вращении второго ведущего винта 62, может быть ограничен, за счет чего обеспечивается плавное перемещение второго опорного элемента 50. Таким образом, обеспечивается возможность точного регулирования положения инструмента для обработки заготовки.
[0055] Хотя станок с числовым программным управлением раскрыт на основе предпочтительного варианта осуществления настоящего изобретения, раскрытого выше, объем настоящего изобретения не ограничивается одним конкретным вариантом осуществления изобретения, и в объем прилагаемых пунктов формулы изобретения включаются все допустимые модификации и эквивалентные варианты.
[0056] ОПИСАНИЕ НОМЕРОВ ПОЗИЦИЙ
[0057] 10: Нижняя рама; 20: Верхняя рама
[0058] 21: Передняя опора; 22: Задняя опора
[0059] 30: Первый опорный элемент; 31: Подвижная деталь
[0060] 32: Первый соединительный элемент; 32: Направляющая
[0061] 40 Первый приводной узел; 41: Второй приводной двигатель
[0062] 42: Первый ведущий винт; 50: Второй опорный элемент
[0063] 51: Второй соединительный элемент; 60: Второй приводной узел
[0064] 61: Второй приводной двигатель; 63: Второй ведущий винт
[0065] 70: Рабочий стол; 80: Первый горизонтальный направляющий рельс
[0066] 81: Второй горизонтальный направляющий рельс; 82: Третий горизонтальный направляющий рельс
[0067] 90: Первый вертикальный направляющий рельс; 91: Второй вертикальный направляющий рельс
[0068] 92: Третий вертикальный направляющий рельс
Изобретение относится к области станкостроения. Станок содержит первый опорный элемент, установленный на основной раме с возможностью горизонтального перемещения по первому, второму и третьему горизонтальным направляющим рельсам, установленным на основной раме. При этом первый и второй горизонтальные направляющие рельсы установлены на расстоянии по вертикали друг от друга на задней поверхности первого опорного элемента, а третий горизонтальный направляющий рельс установлен на передней поверхности первого опорного элемента и расположен по высоте между первым и вторым горизонтальными направляющими рельсами. Кроме того, между первым и вторым направляющими рельсами расположен первый приводной узел с первым приводным двигателем и первым ведущим винтом, выполненный с возможностью обеспечения перемещения первого опорного элемента. Станок может также содержать второй опорный элемент, установленный на первом опорном элементе с возможностью вертикального перемещения посредством второго приводного узла по соответствующим направляющим рельсам. Использование изобретения позволяет повысить точность перемещения инструмента станка. 3 з.п. ф-лы, 6 ил. 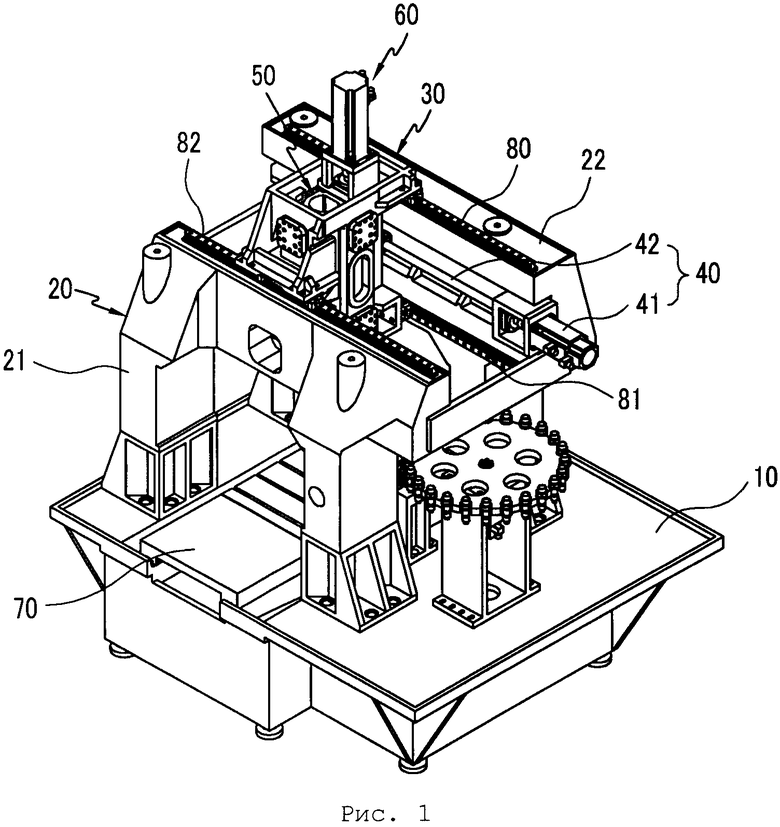
1. Станок с числовым программным управлением, содержащий
первый опорный элемент, установленный на основной раме с возможностью горизонтального перемещения по первому, второму и третьему горизонтальным направляющим рельсам, установленным на основной раме и соответственно соединенными с двумя точками задней поверхности и одной точкой передней поверхности первого опорного элемента для возможности перемещением первого опорного элемента, при этом
первый и второй горизонтальные направляющие рельсы установлены на расстоянии по вертикали друг от друга на задней поверхности первого опорного элемента, а третий горизонтальный направляющий рельс установлен на передней поверхности первого опорного элемента и расположен по высоте между первым и вторым горизонтальными направляющими рельсами, причем
между первым и вторым направляющими рельсами расположен первый приводной узел с первым приводным двигателем и первым ведущим винтом, выполненный с возможностью обеспечения перемещения первого опорного элемента.
2. Станок по п. 1, дополнительно содержащий
второй опорный элемент, установленный на первом опорном элементе с возможностью вертикального перемещения, и
первый, второй и третий вертикальные направляющие рельсы, установленные на втором опорном элементе и соответственно соединенные с тремя точками первого опорного элемента с обеспечением вертикального перемещения второго опорного элемента относительно первого опорного элемента.
3. Станок по п. 2, отличающийся тем, что первый и второй вертикальные направляющие рельсы установлены напротив друг друга на двух боковых поверхностях второго опорного элемента, а
третий вертикальный направляющий рельс установлен на передней поверхности второго опорного элемента.
4. Станок по п. 3, отличающийся тем, что он снабжен вторым приводным узлом со вторым ведущим винтом, соединенным винтовым соединением с задней поверхностью второго опорного элемента с обеспечением вертикального перемещения второго опорного элемента, и вторым приводным двигателем второго ведущего винта, причем второй ведущий винт и второй приводной двигатель установлены в середине задней поверхности второго опорного элемента в вертикальном направлении, при этом
третий горизонтальный направляющий рельс и второй ведущий винт расположены параллельно друг другу по разные стороны от второго опорного элемента.
| US 2006008335 A1, 12.01.2006 | |||
| ПОРТАЛЬНЫЙ СТАНОК | 1997 |
|
RU2130824C1 |
| Паро-воздушная резиновая камера для вулканизации ремонтируемых покрышек | 1939 |
|
SU63729A1 |
| JP 2005262375 A, 29.09.2005 | |||
| US 2012039683 A1, 16.02.2012 | |||
| US 2003077139 A1, 24.04.2003. | |||

