Область техники, к которой относится изобретение
Изобретение относится к области диагностических роботов и может быть использовано для проведения диагностической фото и видео съемки на различных промышленных объектах, таких как открытые распределительные устройства электростанций.
Уровень техники
Из уровня техники [Gehring C. et al. ANYmal in the field: Solving industrial inspection of an offshore HVDC platform with a quadrupedal robot / In book: Field and Service Robotics, 2001, pp. 247-260] известно, что четырехногоие шагающие роботы используются для проведения диагностики промышленных объектов систем электрогенерации.
Также из техники [Hu X. Et al. Design of a quadruped inspection robot used in substation. In Conference: 2021 IEEE 4th Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), 2021, Vol. 4, pp. 766-769] известно об успешном применении для обследования промышленных объектов четырехногих шагающих роботов таких компаний как Boston Dynamics, ANYmal, Ghost robotics и Unitree robotics. Общим для них является расположение диагностического оборудования на верхней части корпуса робота, наведение диагностического оборудования за счет наклона корпуса вперед или назад, а также отсутствием каких-либо механических систем для предотвращения переворачивания робота при падении и предотвращения повреждения диагностического оборудования.
Общим недостатком перечисленных решений является высокий риск падения робота на диагностическое оборудование в случае отключения электропитания, например, из-за израсходования заряда аккумуляторной батареи.
Из уровня техники [CN 110861084B, опубл. 05.04.2022] известен метод самостоятельного восстановления четырехногого шагающего робота после падения, основанный на применении глубокого обучения с подкреплением.
Недостатком данного метода является то, что он не предотвращает само падение, а также не может восстановить повреждения диганостического оборудования, установленного на верхней части корпуса робота, вследствие его падения.
Раскрытие сущности изобретения
Предлагаемое изобретение направлено на решение технической задачи по устранению указанных недостатков.
Достигаемый при этом технический результат заключается в существенном снижении риска падения робота на диагностическое оборудование, закреплённое на верхней поверхности корпуса в случае отключения электропитания.
Технический результат достигается тем, что колесно-шагающий робот для технической диагностики оснащён корпусом, четырьмя приводными ногами, используемыми для перемещения предложенного колесно-шагающего робота, каждая из которых имеет не менее двух степеней свободы, диагностическим оборудованием, закреплённым на верхней поверхности корпуса или на опорно-поворотном устройстве, которое закреплено на верхней поверхности корпуса, и двумя опорными свободно вращающимися колесами, которые размещены на балке, жестко закрепленной к корпусу и перпендикулярно относительно оси прямолинейного движения колесно-шагающего робота таким образом, что каждое из опорных свободно вращающихся колеса расположено на расстоянии не менее половины средней длины указанных приводных ног от оси прямолинейного движения колесно-шагающего робота.
Указанные признаки изобретения являются существенными и совокупность этих признаков достаточна для получения требуемого технического результата.
В различных вариантах исполнения изобретения балка может быть закреплена к корпусу колесно-шагающего робота при помощи соединения, допускающего её перемещение в плоскости, перпендикулярной оси прямолинейного движения колесно-шагающего робота, а также иметь возможность ее отсоединения при помощи съемного крепления от корпуса колесно-шагающего робота для целей последующей транспортировки.
В одном из вариантов исполнения балка может быть выполнена с возможностью разделения на две составные части, каждая из которых выполнена с возможностью независимого закрепления к корпусу колесно-шагающего робота. Данные соединения допускают независимое перемещение составных частей балки в плоскости, перпендикулярной оси прямолинейного движения колесно-шагающего робота, а также с возможностью ее отсоединения при помощи съемного крепления от корпуса колесно-шагающего робота для целей последующей транспортировки.
Краткое описание чертежей
Изобретение поясняется двумя чертежами.
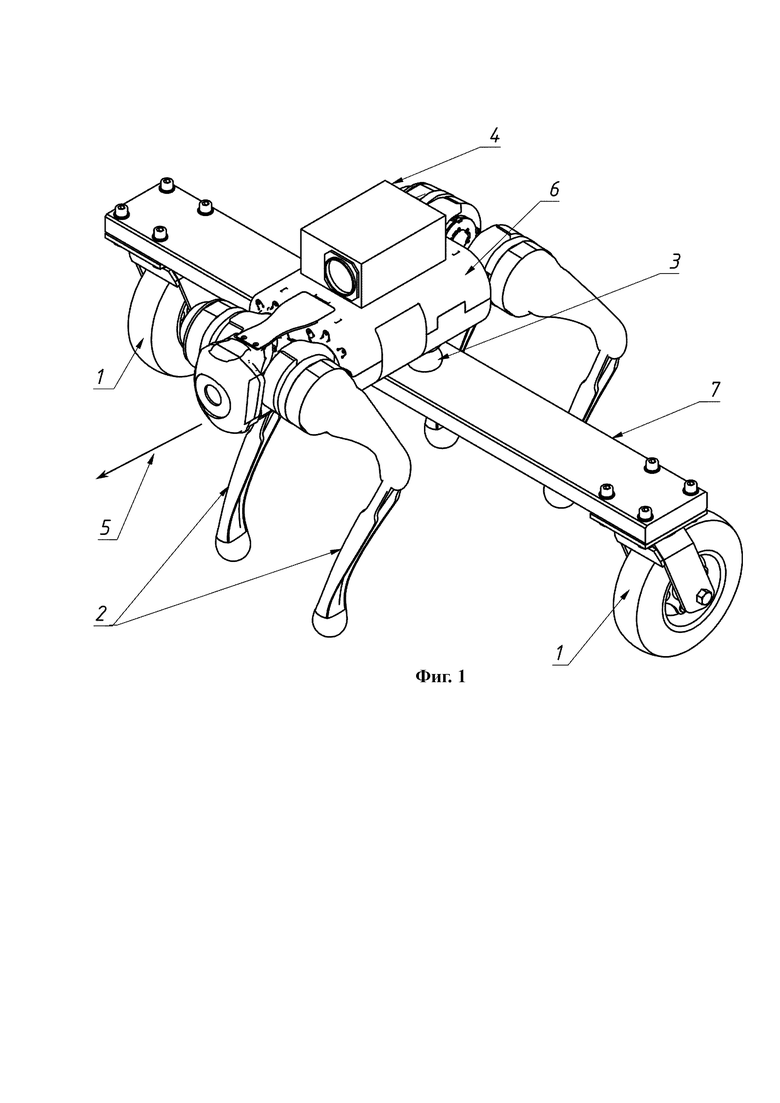
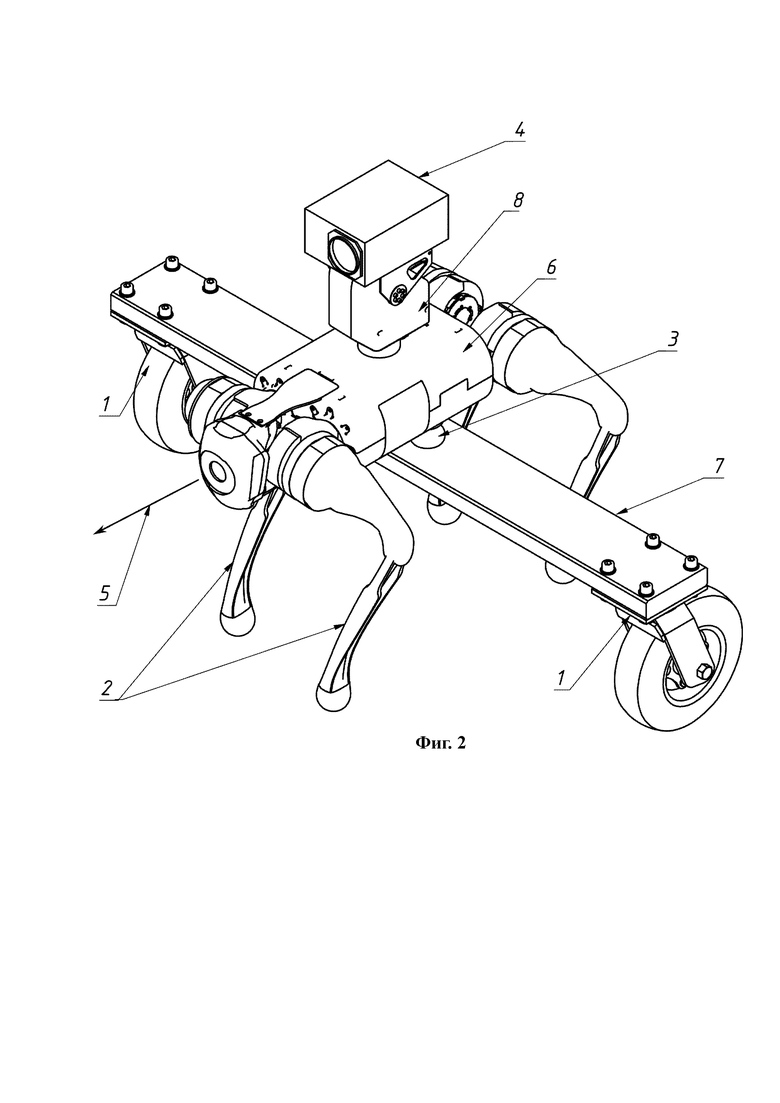
Для пояснения технической сущности, принципа действия и возможности осуществления предложенного изобретения на фиг.1 показан один из вариантов исполнения колесно-шагающего робота для технической диагностики с применением неразъемной балки и диагностического оборудования, установленного на верхнюю часть корпуса. Он содержит: 1 – опорные свободно вращающиеся колеса; 2 – приводные ноги; 3 – крепление балки к корпусу; 4 – диагностическое оборудование; 5 – ось прямолинейного движения колесно-шагающего робота; 6 – корпус, 7 – балку. На фиг.2 показан вариант исполнения колесно-шагающего робота для технической диагностики с использованием опорно-поворотного устройства 8 (в этом варианте диагностическое оборудование 4 закреплено на указанном опорно-поворотном устройстве 8, которое в свою очередь закреплено на верхней поверхности корпуса 6).
Осуществление изобретения
Работает изобретение следующим образом: перемещение колесно-шагающего робота для технической диагностики в пространстве осуществляется за счёт движения его приводных ног 2 с использованием одного из известных из уровня техники алгоритмов реализации походки четырехногих шагающих роботов, например, описанного в [Wen J. et al. A gait planning approach for locomotion stability of four-legged robots / 7th IEEE Conference on Industrial Electronics and Applications (ICIEA). – IEEE, 2012. – с. 324-329]. В процессе движения опорные свободно вращающиеся колеса 1, закреплённые к балке 7, катятся по поверхности земли или пола. Балка 7 в свою очередь закреплена к корпусу 6, например, к нижней его поверхности. За счёт того, что свободно вращающиеся колеса 1 свободно вращаются вокруг своей оси, они не препятствую движению колесно-шагающего робота в каком-либо из направлений, в том числе в бок от оси его прямолинейного движения 5. При преодолении препятствий или при движении по пересечённой местности опорные свободно вращающиеся колеса 1 могут зависать в воздухе, что является одним из вариантов штатного функционирования. В случае отключения электропитания и как следствие неконтролируемого сгибания приводных ног 2, балка 7, закреплённая к корпусу 6, например, к нижней его поверхности, опирается закреплёнными к ней опорными свободно вращающиеся колесами 1 на поверхность земли или пола, препятствуя падению робота на существенную высоту в случае отключения электропитания приводных ног 2. При этом, за счёт того, что каждое из опорных свободно вращающихся колес 1 расположено на расстоянии не менее половины средней длины указанных приводных ног 2 от оси прямолинейного движения колесно-шагающего робота 5, существенно снижается риск падения на диагностическое оборудование 4, закреплённое, как непосредственно на верхней поверхности корпуса 6, так и закреплённое на опорно-поворотном устройстве 8, которое в свою очередь закреплено на верхней поверхности корпуса 6.
Для удобства производства и ремонта в отдельных вариантах исполнения изобретения балка 7 может быть выполнена с возможностью разделения на две составные части, каждая из которых выполнена с возможностью независимого закрепления к корпусу 6.
Для удобства транспортировки в отдельных вариантах исполнения изобретения балка 7 может иметь съёмное крепление, позволяющее транспортировать её и опорные свободно вращающееся колеса 1 отдельно от остальных частей колесно-шагающего робота для технической диагностики. В тех вариантах исполнения изобретения, где балка 7 разделена на две составные части, каждая из данных частей может иметь съёмное крепление.
Для снижения нагрузки на приводные ноги 2 в процессе движения по пересечённой местности в отдельных вариантах исполнения изобретения соединение балки 7 к корпусу 3 может допускать перемещение балки 7 в плоскости, перпендикулярной оси прямолинейного движения колесно-шагающего робота 5. В тех вариантах исполнения изобретения, где балка 7 разделена на две составные части, соединение каждой из данных частей может допускать перемещение балки 7 в плоскости, перпендикулярной оси прямолинейного движения колесно-шагающего робота 5, в том числе независимые.
Работоспособность изобретения была проверена на макете, который наглядно продемонстрировал получение требуемого технического результата. За основу макета колесно-шагающего робота для технической диагностики был взят четырехногий шагающий робот Unitree Go1. К нижней поверхности корпуса макета колесно-шагающего робота для технической диагностики на съемном креплении была закреплена балка, состоящая из одной части, к которой в свою очередь были закреплены два опорных свободно вращающихся колеса. Балка была выполнена из сосновой доски длиной 1000 мм, шириной 150 мм и толщиной 50 мм. В качестве опорных свободно вращающихся колес использовались промышленные поворотные колеса с резиновой шиной с внешним диаметром 160 мм. Опорные свободно вращающиеся колеса были закреплены на обоих концах балки с помощью восьми болтов М10×60. Для соединения балки с корпусом макета колесно-шагающего робота для технической диагностики было использовано крепление на основе вспененного полиэтилена толщиной 200 мм, допускающее перемещение балки в плоскости, перпендикулярной оси прямолинейного движения макета колесно-шагающего робота для технической диагностики и отсоединение ее от корпуса макета колесно-шагающего робота для технической диагностики. Также на верхней поверхности корпуса макета колесно-шагающего робота для технической диагностики было закреплено диагностическое оборудование, представляющее собой масс-габаритный макет ультрафиолетовой камеры Ofil RailHD.
В ходе проведённого с использованием макета колесно-шагающего робота для технической диагностики эксперимента была протестирована способность предложенного изобретения снижать риск падения колесно-шагающего робота для технической диагностики на диагностическое оборудование в случае отключения электропитания. Проведенный эксперимент состоял из двух частей. В первой части использовался четырехногий шагающий робот Unitree Go1 с закрепленным к верхней части поверхности корпуса диагностическим оборудованием, представляющим собой масс-габаритный макет ультрафиолетовой камеры Ofil RailHD. В ходе данного этапа эксперимента четырехногий шагающий робот Unitree Go1 в ручном управлении перемещался на 1 метр вперед, после чего обесточивался путем размыкания его цепи питания. После этого фиксировался факт падения четырехногого шагающего робот Unitree Go1 на масс-габаритный макет диагностического оборудования. Данный этап эксперимента был проведен 25 раз, из которых в 21 случае четырехногий шагающий робот Unitree Go1 падал на масс-габаритный макет диагностического оборудования. Второй этап эксперимента проводился на макете колесно-шагающего робота для технической диагностики. Процедура эксперимента был такой же, как и на первом этапе. Макет колесно-шагающего робота для технической диагностики под ручным управлением перемещался на 1 метр вперед после чего обесточивался. Данный этап эксперимента так же был повторен 25 раз из которых макет колесно-шагающего робота для технической диагностики 0 раз упал на масс-габаритный макет диагностического оборудования. Результаты, полученные в ходе проведенного эксперимента, демонстрируют существенное снижение риска падения макета колесно-шагающего робота для технической диагностики на масс-габаритный макет диагностического оборудования, закреплённого на верхней поверхности корпуса макета колесно-шагающего робота для технической диагностики, в случае отключения электропитания.
Таким образом, результаты проведённых с использованием макета экспериментов продемонстрировали достижение заявленного технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩЕЕ УСТРОЙСТВО | 2016 |
|
RU2642020C2 |
| АДАПТИВНАЯ КОЛЕСНАЯ ОПОРА ТРАНСПОРТНОГО МОДУЛЯ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2023 |
|
RU2821671C1 |
| ШАГАЮЩИЙ АППАРАТ НА ОСНОВЕ ПРЕОБРАЗОВАНИЯ ВОЗОБНОВЛЯЕМОЙ ЭНЕРГИИ В ЭНЕРГИЮ ДВИЖЕНИЯ | 2022 |
|
RU2800033C1 |
| ТРАНСПОРТНЫЙ МОДУЛЬ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2022 |
|
RU2802483C1 |
| АВТОНОМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИКИ ТРУБОПРОВОДОВ | 2021 |
|
RU2780829C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПРОФИЛЯ БАНДАЖА КОЛЕСНЫХ ПАР БЕЗ ВЫКАТКИ | 2019 |
|
RU2717756C1 |
| Способ управления движением четырехногого шагающего робота по пересеченной местности | 2023 |
|
RU2832498C1 |
| ПРИВОДНАЯ КОЛЁСНАЯ НЕПОВОРОТНАЯ ТЕЛЕЖКА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА, ПРЕИМУЩЕСТВЕННО ТРАМВАЯ СО 100%-НЫМ НИЗКИМ УРОВНЕМ ПОЛА С ШИРИНОЙ КОЛЕИ 1000 ММ | 2020 |
|
RU2762296C1 |
| ПРИВОДНАЯ КОЛЁСНАЯ ПОВОРОТНАЯ ТЕЛЕЖКА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА, ПРЕИМУЩЕСТВЕННО ТРАМВАЯ СО 100%-НЫМ НИЗКИМ УРОВНЕМ ПОЛА, С ШИРИНОЙ КОЛЕИ 1000 ММ | 2020 |
|
RU2759962C1 |
| ПЕРЕДВИЖНОЕ МАССАЖНОЕ КРЕСЛО С ПОДСТАВКОЙ | 2024 |
|
RU2841133C1 |
Изобретение относится к области диагностических роботов. Колёсно-шагающий робот для технической диагностики оснащён корпусом, четырьмя приводными ногами, используемыми для перемещения колёсно-шагающего робота, диагностическим оборудованием и двумя опорными свободновращающимися колесами. Опорные свободновращающиеся колёса размещены на балке, закреплённой к корпусу и перпендикулярно относительно оси прямолинейного движения колёсно-шагающего робота таким образом, что каждое из опорных свободновращающихся колес расположено на расстоянии не менее половины средней длины указанных приводных ног от оси прямолинейного движения колёсно-шагающего робота. Достигается снижение риска падения робота на диагностическое оборудование, закреплённое на верхней поверхности корпуса, в случае отключения электропитания. 5 з.п. ф-лы, 2 ил.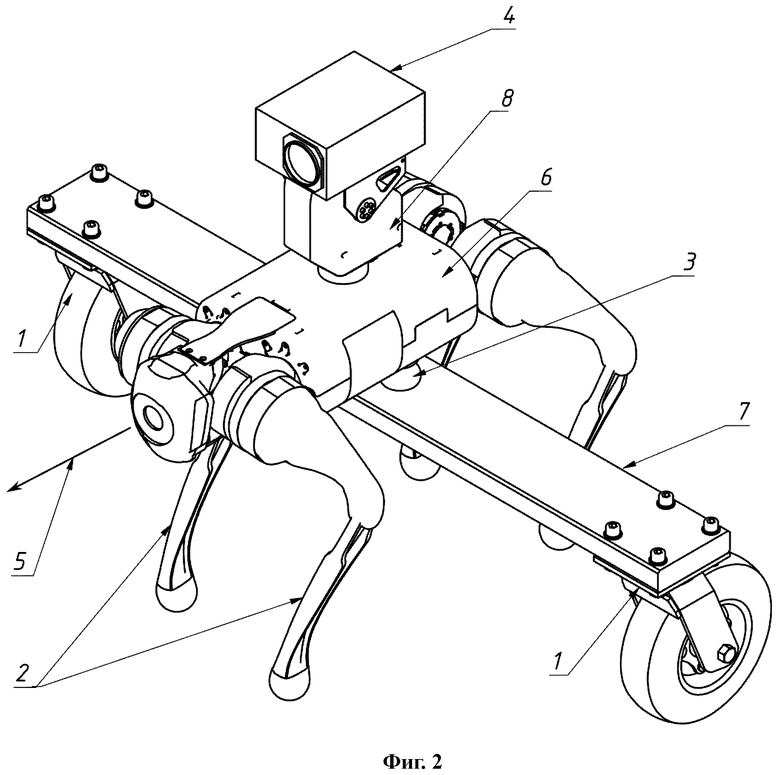
1. Колёсно-шагающий робот для технической диагностики, характеризующийся тем, что оснащён корпусом, четырьмя приводными ногами, используемыми для перемещения колёсно-шагающего робота, каждая из которых имеет не менее двух степеней свободы, диагностическим оборудованием, закреплённым на верхней поверхности корпуса или на опорно-поворотном устройстве, которое закреплено на верхней поверхности корпуса, и двумя опорными свободновращающимися колёсами, которые размещены на балке, закреплённой к корпусу и перпендикулярно относительно оси прямолинейного движения колёсно-шагающего робота таким образом, что каждое из опорных свободновращающихся колес расположено на расстоянии не менее половины средней длины указанных приводных ног от оси прямолинейного движения колёсно-шагающего робота.
2. Колёсно-шагающий робот для технической диагностики по п. 1, характеризующийся тем, что балка закреплена к корпусу при помощи соединения с возможностью её перемещения в плоскости, перпендикулярной оси прямолинейного движения колёсно-шагающего робота.
3. Колёсно-шагающий робот для технической диагностики по п. 1 или 2, характеризующийся тем, что балка имеет съёмное крепление, позволяющее отсоединять её от корпуса для последующей транспортировки.
4. Колёсно-шагающий робот для технической диагностики по п. 1, характеризующийся тем, что балка выполнена с возможностью разделения на две составные части, каждая из которых выполнена с возможностью независимого закрепления к корпусу.
5. Колёсно-шагающий робот для технической диагностики по п. 4, характеризующийся тем, что составные части балки выполнены с возможностью закрепления к корпусу при помощи соединений с возможностью независимого перемещения указанных составных частей в плоскости, перпендикулярной оси прямолинейного движения колёсно-шагающего робота.
6. Колёсно-шагающий робот для технической диагностики по п. 4 или 5, характеризующийся тем, что составные части балки имеют съёмное крепление, позволяющее отсоединять её от корпуса для последующей транспортировки.
| US 20230418297 A1, 28.12.2023 | |||
| CN 103287523 A, 11.09.2013 | |||
| US 3802720 A, 09.04.1974 | |||
| CN 107323561 A, 07.11.2017 | |||
| CN 102407893 A, 11.04.2012 | |||
| РОБОТИЗИРОВАННОЕ УСТРОЙСТВО | 2022 |
|
RU2788754C1 |

