Область техники, к которой относится изобретение
Настоящее изобретение относится к машине для радиальной ковки с одним или несколькими молотами, в которой во время рабочего хода каждый молот, приводимый в движение эксцентриковым механизмом, перемещается вперед и назад.
Уровень техники
Принцип радиальной ковки с помощью нескольких молотов основан на одновременной обработке подаваемого металлического изделия с помощью нескольких молотов, например четырех молотов, которые двигаются в радиальном направлении относительно продольной оси подачи обрабатываемого металлического изделия.
Во время обработки молоты совершают короткий ход вперед-назад и приводятся в движение, в частности, за счет шатунно-кривошипного механизма с соединительной тягой, в котором кривошип представляет собой эксцентриковый вал, а соединительная тяга представляет собой цилиндр, перемещающийся внутри гильзы.
Кинематическая цепь, обычно создаваемая с помощью шестерен, соединяет эксцентриковые валы механизмов машины друг с другом, что позволяет синхронизировать перемещения молотов, соединенных с соответствующим цилиндром.
Эксцентриковый вал соединен с системой тяги напрямую вдоль оси либо с помощью кинематической цепи, описанной выше.
Эксцентриковый вал изготовлен таким образом, чтобы маховик обладал высокой инерцией, что позволяет увеличить циклическое усилие по сравнению с усилием, которое может быть создано с помощью среднего крутящего момента, передаваемого от системы тяги на обрабатываемый материал.
Обычно в данной системе связь между шатуном и цилиндром является двусторонней, то есть она обеспечивает противодействие усилию тяги и усилию сжатия. Из уровня техники, например из документа ЕР 0667197 В1, известны системы, в которых такая связь является односторонней, то есть она обеспечивает противодействие только усилиям сжатия. Контакт между шатуном и цилиндром сохраняется даже в том случае, когда они стремятся разделиться, за счет механической или гидравлической пружины, которая действует на цилиндр в направлении перемещения эксцентрикового вала, который работает как кривошип.
Недостатком данного типа машин является то, что они имеют специальное назначение, то есть могут работать только как ротационная ковочная машина, которая имеет короткий рабочий ход (достигаемый за счет эксцентричности вала) и высокую частоту (достигаемую за счет скорости вращения эксцентрикового вала).
Кроме того в документе ЕР 0667197 В1 описано, что между двумя частями, формирующими цилиндр, используется винтовое соединение/ соединение «винт-гайка». Данный тип соединения, используемый для изменения длины цилиндра и, следовательно, положения молота, позволяет перемещать молот только с небольшой скоростью, когда на него не действуют нагрузки, и не обеспечивает поглощения чрезмерных нагрузок, создаваемых материалом во время обработки. Таким образом, данное соединение имеет слишком большие размеры, подвержено износу и может выйти из строя.
Известны менее распространенные решения, в которых система, приводящая молоты в движение, содержит гидравлический цилиндр, прикрепленный к раме ковочной машины и приводимый в движение с помощью клапанов ковочной машины. В таких системах работа может выполняться при большем рабочем ходе и более низкой частоте, что позволяет использовать машину для ковки материалов с повышенной глубиной проникновения деформаций. Таким образом, в данном случае машина работает как традиционный ковочный пресс. Однако работа машины при коротком рабочем ходе с высокой частотой, то есть в режиме ротационной ковочной машины, имеет меньшие частоту и точность синхронизации движений молотов; при этом также значительно снижается эффективность использования энергии.
Следовательно, существует необходимость создания инновационной ковочной машины, которая позволит устранить недостатки, описанные выше.
Раскрытие изобретения
Основной целью настоящего изобретения является создание радиальной ковочной машины, например, с двумя, тремя или четырьмя молотами, которую можно эффективно использовать и в качестве ротационной ковочной машины (с коротким рабочим ходом и высокой частотой), и в качестве традиционного ковочного пресса (с более длинным рабочим ходом молота, низкими частотами и скоростью модульной ковки).
Еще одной целью настоящего изобретения является создание радиальной ковочной машины, выполненной с возможностью попеременно использовать привод от шатуна/кривошипа или только гидравлический привод.
Другой целью изобретения является создание радиальной ковочной машины, позволяющей легко и быстро настраивать положение молота, при этом машина защищена от чрезмерных нагрузок.
Таким образом, цели, описанные выше, достигают за счет ковочной машины с одним или несколькими молотами, которая содержит следующие компоненты для каждого молота:
- эксцентриковый вал, выполненный с возможностью вращаться вокруг первой оси;
- шатун, приводимый в движение с помощью указанного эксцентрикового вала, который работает как кривошип;
- и направляющую раму;
в которой молот выполнен с возможностью совершения возвратно-поступательных рабочих движений внутри указанной направляющей рамы вдоль второй оси, перпендикулярной первой оси;
в которой молот содержит гидравлический цилиндр с полым корпусом, к которому снаружи прикреплен ковочный элемент, и поршень, по меньшей мере, частично вставленный в указанный полый корпус и имеющий разъемное соединение с шатуном;
в которой первая гидравлическая камера, расположенная между поршнем и полым корпусом, позволяет перемещать полый корпус от и/или к поршню;
и в которой предусмотрены приспособления для отсоединения, предназначенные для отсоединения поршня от шатуна таким образом, что после отсоединения молот может совершать возвратно-поступательные движения с помощью гидравлического привода, используя первую гидравлическую камеру, при этом когда поршень соединен с шатуном, молот может совершать возвратно-поступательные движения с помощью механического привода, используя узел эксцентрикового вала и шатуна, а первая гидравлическая камера выполнена с возможностью регулировать среднее рабочее положение молота вдоль второй оси.
Также в соответствии с изобретением заявлен способ переключения ковочной машины, описанной выше, из режима работы в качестве ротационной ковочной машины в режим работы в качестве традиционного ковочного пресса, при этом данный способ содержит следующие этапы:
a) обеспечивают взаимный контакт между поршнем и шатуном таким образом, чтобы молот мог совершать возвратно-поступательные движения с помощью механического привода, используя узел эксцентрикового вала и шатуна, при этом первая гидравлическая камера позволяет регулировать среднее рабочее положение молота вдоль второй оси, в данном случае машина работает в качестве ротационной ковочной машины;
b) отсоединяют поршень от шатуна с помощью приспособлений для отсоединения таким образом, чтобы молот мог совершать возвратно-поступательные движения с помощью гидравлического привода, поочередно выполняя впуск и выпуск жидкости из первой гидравлической камеры, в данном случае машина работает в качестве ковочного пресса.
Кроме того в соответствии с изобретением заявлен способ переключения ковочной машины, описанной выше, из режима работы в качестве ковочного пресса в режим работы в качестве ротационной ковочной машины, данный способ содержит этапы по п. 14.
В ковочной машине, соответствующей изобретению, каждый эксцентриковый вал соединен с соответствующим шатуном с помощью тела цилиндрической формы с низким коэффициентом трения или простого подшипника. Молот, содержащий гидравлический цилиндр, может свободно перемещаться вдоль оси, перпендикулярной оси эксцентрикового вала, и поддерживать контакт с шатуном через элемент с низким коэффициентом трения (ползун), используя гидравлическое давление в кольцевой камере, которая выполняет функцию гидравлической компенсационной пружины.
Эксцентриковый вал вращается за счет системы тяги, при этом в первом режиме работы он совершает возвратно-поступательные движения, амплитуда которых равна двойному эксцентриситету вала, а частота равна частоте вращения вала на гидравлическом цилиндре с помощью шатуна.
Ковочный элемент жестко соединен (с возможностью снятия для выполнения замены) с торцевой частью гидравлического цилиндра, благодаря чему он способен совершать одинаковые возвратно-поступательные движения для выполнения обработки изделия.
Гидравлический цилиндр содержит поршень и гильзу или полый корпус, между которыми сформирована дополнительная гидравлическая камера. Данная дополнительная гидравлическая камера позволяет регулировать длину цилиндра: за счет подачи необходимого количества масла в дополнительную камеру можно переместить гильзу от или к поршню, чтобы достичь правильного положения, в котором ковочный элемент будет обрабатывать изделие.
Данная дополнительная гидравлическая камера также используется в качестве защитного приспособления для машинного оборудования в случае возникновения чрезмерных нагрузок: фактически в данных случаях масло в дополнительной камере может быть слито с помощью клапана максимального давления для обеспечения защиты компонентов машины.
За счет использования простых механизмов и кинематической точности синхронизации молота данный первый режим работы (так называемый «режим работы в качестве ротационной ковочной машины») позволяет достигать высоких рабочих частот при коротком рабочем ходе молота с любыми значениями глубины проникновения деформаций в материал.
В случае необходимости работы при длинном рабочем ходе, более низких частотах и скорости модульной ковки дополнительно можно использовать только гидравлический привод без механической передачи, содержащей эксцентриковый вал и шатун, то есть использовать гидравлический привод от гидравлической камеры, описанной выше, изменяя длину гидравлических цилиндров и, следовательно, радиальное положение ковочного элемента. В данном втором режиме работы (так называемом «режиме работы в качестве традиционного ковочного пресса») подшипник между шатуном и эксцентриковым валом не вращается и, следовательно, должен быть защищен от чрезмерных нагрузок, особенно при установке подшипника гидродинамического типа. Таким образом, в указанном втором режиме работы усилие, с которым гидравлический цилиндр действует на обрабатываемый материал, не должно передаваться на подшипник.
Для включения второго режима работы указанные выше приспособления для отсоединения или расцепления отделяют гидравлический цилиндр от эксцентрикового привода. Предпочтительно клин, жестко прикрепленный к конструкции машины, перемещается между двумя крайними положениями:
- отцепленное положение клина (режим работы в качестве ротационной ковочной машины), в котором вне зависимости от рабочего положения поршня между нижней поверхностью клина и верхней поверхностью поршня всегда остается зазор;
- и сцепленное положение клина (режим работы в качестве ковочного пресса), в котором между шатуном и поршнем всегда сохраняется зазор.
После разделения поршня и привода от шатуна/кривошипа машина может использовать гидравлический привод от гидравлической камеры между поршнем и гильзой, изменяя длину цилиндра и, следовательно, положение ковочного элемента за счет возвратно-поступательных движений. Машина также может быть предназначена для работы при длинном рабочем ходе, то есть в режиме ковки, поскольку в этом случае будет возможно перемещение гильзы или полого корпуса, и, следовательно, ковочного элемента, от поршня либо путем заполнения, либо путем опорожнения указанной выше гидравлической камеры. В данном режиме обычно требуется меньшая частота по сравнению с режимом работы в качестве ковочного пресса, контролируемого с помощью системы шатуна и кривошипа, в котором, напротив, используется короткий рабочий ход и высокие частоты.
Таким образом, ковочная машина в соответствии с изобретением имеет следующие преимущества:
- позволяет выполнять ковку с низкой скоростью и длинным рабочим ходом за счет отключения шатунно-кривошипного механизма и использования только гидравлического привода;
- обеспечение ковки при изменяемой скорости ковки за счет отключения шатунно-кривошипного механизма и использования только гидравлического привода;
- настройка положения молота с помощью гидравлической системы во время использования машины в режиме работы в качестве ковочного пресса;
- защита машины от чрезмерных нагрузок в обоих режимах работы.
Краткое описание чертежей
Другие отличительные особенности и преимущества изобретения станут понятны после ознакомления с описанием предпочтительного, но не исключительного, варианта реализации ковочной машины со ссылкой на сопроводительные чертежи, на которых:
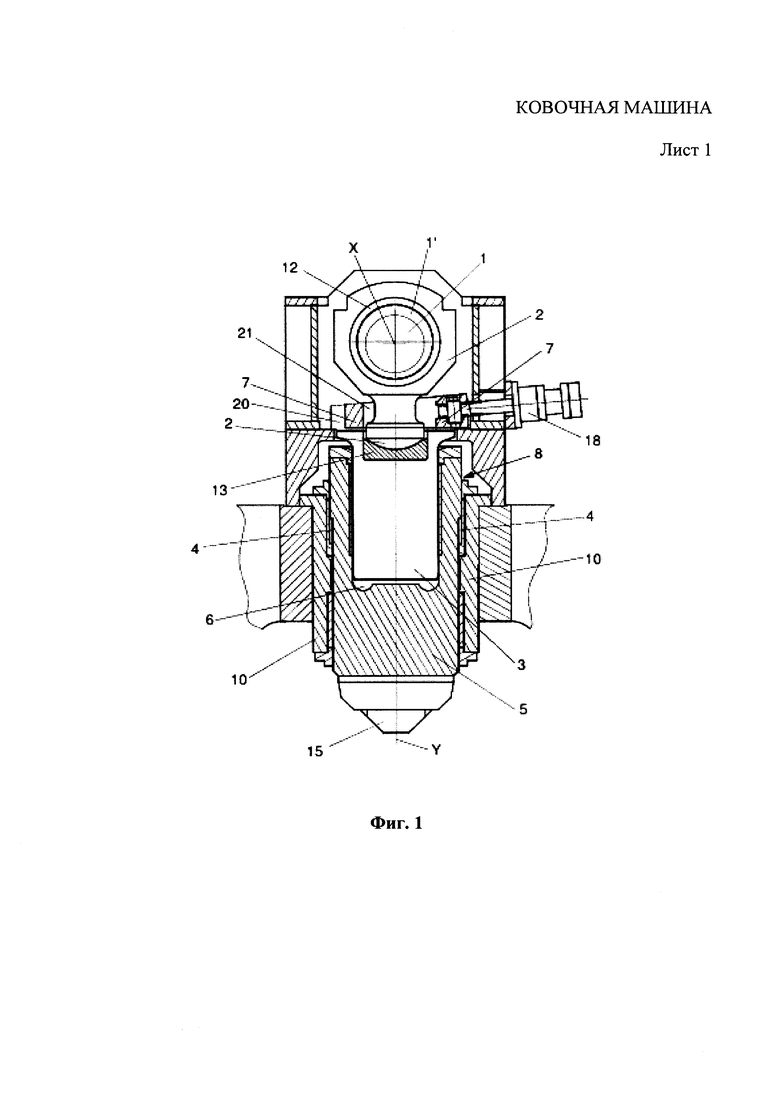
на Фиг. 1 показан первый вид в разрезе части машины, соответствующей изобретению, когда она работает в первом режиме работы в качестве ковочного пресса;
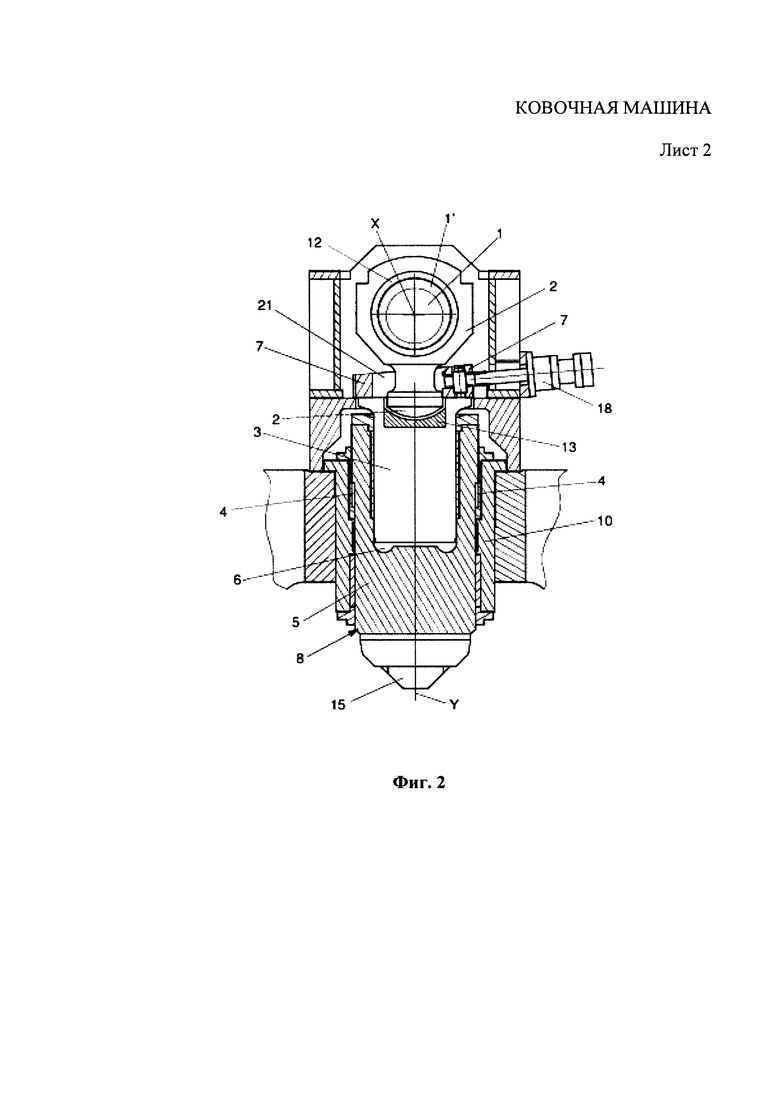
на Фиг. 2 показан второй вид в разрезе машины, соответствующей изобретению, когда она работает во втором режиме работы в качестве ковочной машины;
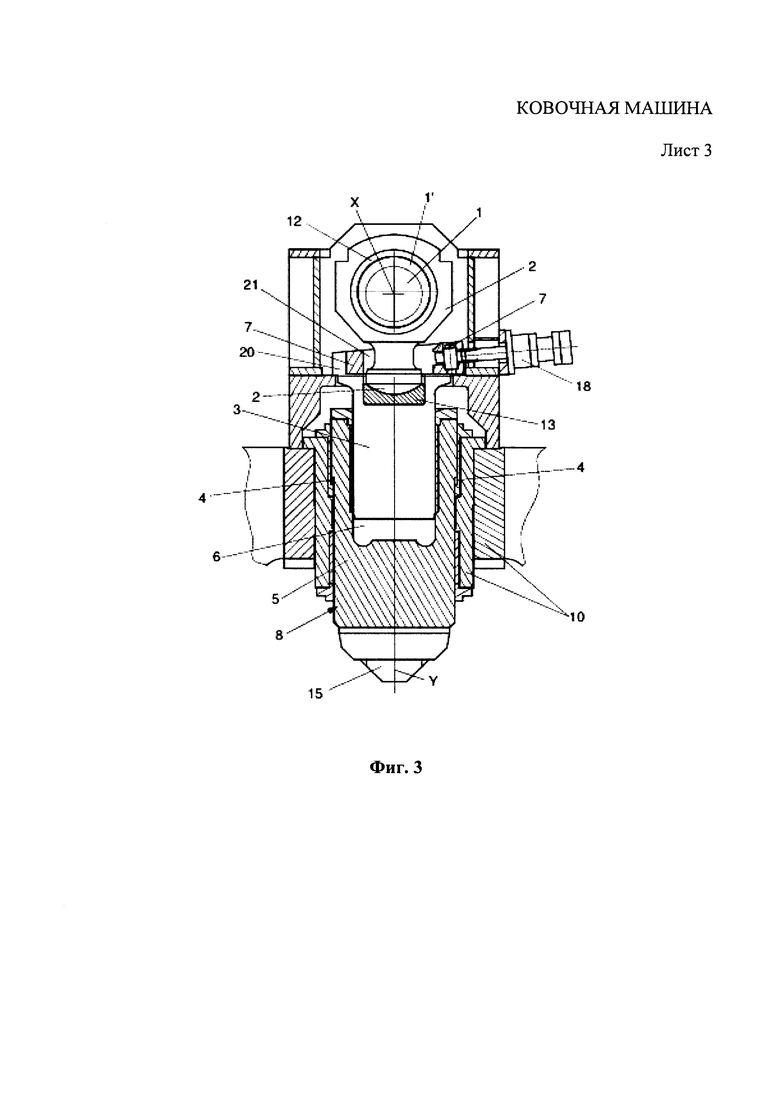
на Фиг. 3 показан третий вид в разрезе части машины, соответствующей изобретению, когда она работает в первом режиме работы в качестве ковочного пресса с гидравлическим цилиндром, находящимся в выдвинутом рабочем положении.
Осуществление изобретения
На сопроводительных чертежах показан предпочтительный вариант реализации части радиальной ковочной машины с одним или несколькими молотами, которая в соответствии с изобретением может работать в качестве ротационной ковочной машины или традиционного ковочного пресса.
При работе в качестве ротационной ковочной машины используют короткий рабочий ход молотов, например меньший или равный 80 мм, и высокие частоты, например в диапазоне от 2 Гц до 8 Гц.
При работе в качестве традиционный ковочной машины используют длинный рабочий ход молотов, например меньший или равный 500 мм, и низкие частоты, например ниже 3 Гц, и скорость модульной ковки, меньшая или равная 500 мм/с.
Для каждого молота машина в соответствии с изобретением содержит:
- эксцентриковый вал 1, выполненный с возможностью вращаться вокруг первой оси X,
- шатун 2, приводимый в движение с помощью указанного эксцентрикового вала 1, который работает как кривошип,
- направляющую раму 10 для направления молота при возвратно-поступательных рабочих движениях.
Эксцентриковый вал 1 имеет эксцентриковую часть 1', смещенную относительно первой оси X, которая имеет шарнирное соединение с шатуном 2. Между шатуном 2 и эксцентриковой частью 1' установлен подшипник 12 (предпочтительно, но не обязательно гидродинамический подшипник (подшипник жидкостного трения)).
Каждый молот, выполненный с возможностью совершать возвратно-поступательные рабочие движения внутри соответствующей направляющей рамы 10 вдоль второй оси Y, перпендикулярной первой оси X, содержит гидравлический цилиндр 8.
Такой гидравлический цилиндр 8 имеет полый корпус 5, расположенный на некотором расстоянии от шатуна 2, к которому снаружи прикреплен ковочный элемент 15, и поршень 3, расположенный рядом с шатуном 2 и, по меньшей мере, частично вставленный в полый корпус 5. Предпочтительно ковочный элемент 15 всегда находится снаружи направляющей рамы 10. Однако нельзя исключить, что во втянутом положении ковочный элемент 15, по меньшей мере, частично будет находиться внутри направляющей рамы 10. Предпочтительно поршень 3 соединен с шатуном 2 с возможностью отсоединения (Фиг. 1 и 2).
Обычно между поршнем 3 и шатуном 2 предусматривают элемент 13 с низким коэффициентом трения, который полностью зафиксирован на поршне 3 и предпочтительно расположен в полости поршня 3.
Гидравлический цилиндр 8 дополнительно содержит гидравлическую камеру 6, расположенную между поршнем 3 и полым корпусом 5, причем при впуске в нее жидкости, например гидравлического масла, она перемещает полый корпус 5 и, следовательно, ковочный элемент 15 от поршня 3. Вместо этого полый корпус 5 может быть перемещен к поршню 3 за счет выпуска жидкости из гидравлической камеры 6. Каналы для впуска и выпуска гидравлического масла, соединенные с гидравлической камерой 6 и обычно проходящие внутри гидравлических цилиндров, не показаны на сопроводительных чертежах.
Предпочтительно приспособления для отсоединения обеспечивают отсоединение поршня 3 от шатуна 2.
В соответствии с предпочтительным вариантом реализации, такие приспособления для отсоединения содержат привод 18, который приводит в движение клин 7, расположенный в полости 20 конструкции машины между эксцентриковым валом 1 и поршнем 3, и который может перемещаться внутри указанной полости таким образом, что между клином 7 и поршнем 3 обеспечивается контакт, а между поршнем 3 и шатуном 2 создается зазор, когда клин 7 находится в первом рабочем положении или первом конечном положении (Фиг. 2), и что между поршнем 3 и шатуном 2 обеспечивается контакт, а между клином 7 и поршнем 3 создается зазор, когда клин 7 находится во втором рабочем положении или втором конечном положении (Фиг. 1).
Привод 18 может представлять собой гидравлический, пневматический или механический зажим, приводимый в движение автоматически или вручную. Привод 18 зафиксирован на раме или основном корпусе машины. Предпочтительно клин 7 имеет центральное отверстие 21, через которое проходит конец шатуна 2, расположенный рядом с поршнем 3.
В соответствии с другими вариантами реализации, приспособления для отсоединения могут содержать, например, гидравлическое опорное кольцо, электромеханические зажимы, расположенные коаксиально молоту, приспособления для отцепления шатуна с возможностью смещения шатуна в повернутое положение относительно оси Y, причем шатун имеет (механически или гидравлически) регулируемую длину.
В первом рабочем положении (Фиг. 2), то есть после разъединения поршня 3 и шатуна 2, молот может использовать только гидравлический привод и совершать возвратно-поступательные движения за счет первой гидравлической камеры 6. Машина может работать с длинным рабочим ходом, то есть в режиме работы в качестве ковочного пресса, за счет перемещения полого корпуса 5 и, следовательно, ковочного элемента 15, попеременно от или к поршню 3 при заполнении или опорожнении гидравлической камеры 6. Во время работы в данном режиме исключена вероятность передачи усилия ковки на шатун 2, а затем на невращающийся подшипник 12, поскольку усилие тяги на поршне 3 будет передаваться на основную раму машины через клин 7.
Во втором рабочем положении (Фиг. 1), в котором поршень 3 и шатун 2 соединены друг с другом, молот может совершать возвратно-поступательные движения за счет механического привода с помощью узла эксцентрикового вала 1 и шатуна 2. В данном случае машина может работать в качестве ротационной ковочной машины с коротким рабочим ходом молота и высокой частотой колебаний. Гидравлическая камера 6 позволяет регулировать только среднее рабочее положение молота вдоль второй оси Y за счет изменения количества жидкости в ней. Наличие клапана максимального давления (не показан) для гидравлической камеры 6 позволяет предотвратить передачу чрезмерных нагрузок на шатун 2 и, следовательно, на подшипник 12 в режиме работы в качестве ротационной ковочной машины.
По варианту в соответствии с изобретением, жидкость может быть впущена или выпущена из гидравлической камеры 6 с помощью сервоклапана таким образом, чтобы можно было быстро изменять среднее рабочее положение молота между одним ударом молота и следующим ударом.
Вторая гидравлическая камера 4 кольцевой формы также установлена между направляющей рамой 10 и полым корпусом 5 цилиндра 8. Данная вторая гидравлическая камера 4 предназначена для обеспечения постоянного контакта между поршнем 3 и клином 7, когда клин находится в первом рабочем положении. В частности, данный контакт создается за счет гидравлического давления внутри кольцевой камеры 4, которая работает как гидравлическая компенсационная пружина.
По варианту в соответствии с изобретением, указанное первое рабочее состояние возникает, когда шатун 2 и эксцентриковая часть 1' вала 1 находятся в верхнем положении, как показано на сопроводительных чертежах.
Когда же клин 7 находится во втором рабочем положении, вторая гидравлическая камера 4 используется для обеспечения постоянного контакта между поршнем 3 и шатуном 2. Уменьшение длины цилиндра 8 достигается за счет гидравлического давления в кольцевой гидравлической камере 4, которая работает как гидравлическая компенсационная пружина.
Ковочная машина может иметь либо только один молот, либо два или более молотов, например четыре молота. При наличии нескольких молотов они могут перемещаться в радиальном направлении относительно продольной оси перемещения обрабатываемого изделия. Кинематическая цепь, соединяющая эксцентриковые валы 1 отдельных молотов, предназначена для синхронизации рабочих ходов всех молотов одной машины при работе в качестве ротационной ковочной машины.
Таким образом, ковочная машина может переключаться из режима работы в качестве ротационной ковочной машины в режим работы в качестве ковочного пресса. Способ смены режима работы содержит следующие этапы:
a) обеспечивают взаимный контакт поршня 3 и шатуна 2 таким образом, чтобы молот мог совершать возвратно-поступательные движения с помощью механического привода, используя узел эксцентрикового вала 1 и шатуна 2, при этом первая гидравлическая камера 6 позволяет регулировать среднее рабочее положение молота вдоль второй оси Y, в данном случае машина работает в качестве ротационной ковочной машины;
b) отсоединяют поршень 3 от шатуна 2 с помощью приспособлений для отсоединения таким образом, чтобы молот мог совершать возвратно-поступательные движения с помощью гидравлического привода, поочередно выполняя впуск и выпуск жидкости из первой гидравлической камеры 6, в данном случае машина работает в качестве ковочного пресса.
На этапе а) клин 7 находится во втором рабочем положении, в котором между клином 7 и поршнем 3 имеется зазор. После этапа b) клин 7 находится в указанном первом рабочем положении, в котором клин 7 находится в положении контакта с поршнем 3.
Обратное переключение из режима работы в качестве ковочного пресса в режим работы в качестве ротационной ковочной машины выполняют с помощью следующих этапов:
c) устанавливают клин 7 в первое рабочее положение, в котором поршень 3 и клин 7 находятся в положении контакта, а поршень 3 и шатун 2 отсоединены друг от друга, таким образом, чтобы молот мог совершать возвратно-поступательные движения с помощью гидравлического привода, поочередно выполняя впуск и выпуск жидкости из первой гидравлической камеры 6, в данном случае машина работает в качестве ковочного пресса;
d) соединяют поршень 3 с шатуном 2 за счет перемещения клина 7 из указанного первого рабочего положения во второе рабочее положение, в котором между поршнем 3 и клином 7 имеется зазор, таким образом, чтобы молот мог совершать возвратно-поступательные движения, используя узел эксцентрикового вала 1 и шатуна 2, при этом первая гидравлическая камера 6 позволяет регулировать среднее рабочее положение молота вдоль второй оси Y, в данном случае машина работает в качестве ротационной ковочной машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД РАБОЧИХ ИНСТРУМЕНТОВ КОВОЧНОЙ МАШИНЫ | 1990 |
|
RU2015025C1 |
| АВТОМАТИЧЕСКАЯ МАШИНА ДЛЯ ОБРАБОТКИ ДАВЛЕНИЕМ | 1993 |
|
RU2096122C1 |
| Радиально-ковочная машина | 1983 |
|
SU1186343A1 |
| ВСГСООЗНАЯ ,' БНБ:;;Г'"''^ЭДЯ/-^llEl^TEKA | 1971 |
|
SU297160A1 |
| Радиально-ковочная машина | 1980 |
|
SU979004A1 |
| Привод рабочих инструментов ковочной машины | 1990 |
|
SU1750832A1 |
| Молот для изготовления профилей переменного сечения | 1946 |
|
SU68584A2 |
| УСТРОЙСТВО для ЗАДАЧИ ТРУБ В РАДИАЛЬНО-КОВОЧНУЮМАШИНУ | 1972 |
|
SU323180A1 |
| УСТРОЙСТВО ДЛЯ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ МАШИН ДЛЯ ОБРАБОТКИ МЕТАЛЛОВ ДАВЛЕНИЕМ (ВАРИАНТЫ), СПОСОБ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ МАШИН ДЛЯ ОБРАБОТКИ МЕТАЛЛОВ ДАВЛЕНИЕМ И СИСТЕМА УПРАВЛЕНИЯ УСТРОЙСТВОМ ДЛЯ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ МАШИН ДЛЯ ОБРАБОТКИ МЕТАЛЛОВ ДАВЛЕНИЕМ | 2009 |
|
RU2472977C2 |
| Механогидравлический пресс | 1990 |
|
SU1784472A1 |
Изобретение относится к ковочному оборудованию. Ковочная машина содержит по меньшей мере один молот, оснащенный эксцентриковым валом (1), шатуном (2) и направляющей рамой (10). Молот содержит также гидравлический цилиндр (8) с полым корпусом (5), к которому снаружи прикреплен ковочный элемент (15), и поршнем (3). Поршень по меньшей мере частично вставлен в полый корпус и имеет разъемное соединение с шатуном. Гидравлическая камера (6), расположенная между поршнем и полым корпусом, обеспечивает перемещение полого корпуса от и/или к поршню. Кроме того, предусмотрены отсоединяющие приспособления для отсоединения поршня от шатуна. В результате обеспечивается возможность использования ковочной машины в качестве ротационной ковочной машины и в качестве ковочного пресса. 3 н. и 12 з.п. ф-лы, 3 ил.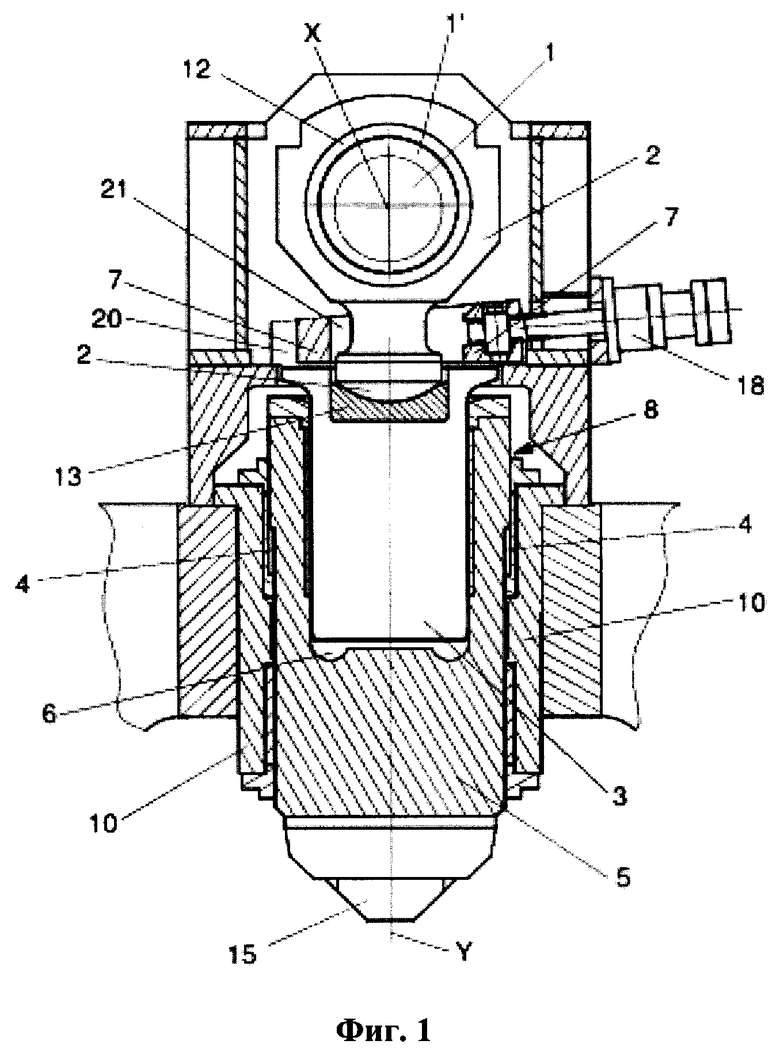
1. Ковочная машина, содержащая по меньшей мере один молот и выполненная с возможностью работы в режиме ротационной ковочной машины и в режиме ковочного пресса, причем для каждого молота она содержит:
- эксцентриковый вал (1), выполненный с возможностью вращения вокруг первой оси (X),
- шатун (2), имеющий возможность приведения в движение с помощью указанного эксцентрикового вала (1), функционирующего как кривошип,
- направляющую раму (10),
при этом молот выполнен с возможностью возвратно-поступательного рабочего движения внутри направляющей рамы (10) вдоль второй оси (Y), перпендикулярной первой оси (X), и содержит
гидравлический цилиндр (8) с полым корпусом (5), к которому снаружи прикреплен ковочный элемент (15), и поршень (3), имеющий разъемное соединение с шатуном (2) и по меньшей мере частично вставленный в полый корпус (5) с образованием между ними первой гидравлической камеры (6), выполненной с возможностью перемещения полого корпуса (5) от поршня (3) и/или к упомянутому поршню,
и отсоединяющие приспособления для отсоединения поршня (3) от шатуна (2), обеспечивающие возможность после отсоединения приведения молота в возвратно-поступательное движение гидравлически посредством первой гидравлической камеры (6) и работы ковочной машины в режиме ковочного пресса, а после соединения поршня (3) с шатуном (2) возможность приведения молота в возвратно-поступательное движение механически посредством узла эксцентрикового вала (1) и шатуна (2) и работы ковочной машины в режиме ротационной ковочной машины, при этом первая гидравлическая камера (6) выполнена с возможностью регулирования среднего рабочего положения молота вдоль второй оси (Y).
2. Ковочная машина по п. 1, в которой отсоединяющие приспособления содержат клин (7), расположенный в полости (20) между эксцентриковым валом (1) и поршнем (3) и выполненный с возможностью управления посредством привода (18) с обеспечением при нахождении клина в первом рабочем положении контакта между клином (7) и поршнем (3) и зазора между поршнем (3) и шатуном (2), а при нахождении клина во втором рабочем положении - контакта между поршнем (3) и шатуном (2) и зазора между клином (7) и поршнем (3).
3. Ковочная машина по п. 2, в которой клин (7) и привод (18) соединены с рамой ковочной машины.
4. Ковочная машина по п. 2 или 3, которая содержит вторую гидравлическую камеру (4), предназначенную для обеспечения постоянного контакта между поршнем (3) и клином (7) при нахождении клина в первом рабочем положении и между поршнем (3) и шатуном (2) при нахождении клина во втором рабочем положении.
5. Ковочная машина по п. 4, в которой вторая гидравлическая камера (4) имеет кольцевую форму и расположена между направляющей рамой (10) и полым корпусом (5).
6. Ковочная машина по п. 1 или 2, в которой первая гидравлическая камера (6) имеет клапан максимального давления, активируемый при чрезмерных нагрузках в случае приведения молота в возвратно-поступательное движение механически.
7. Ковочная машина по п. 1 или 2, в которой первая гидравлическая камера (6) имеет сервоклапан.
8. Ковочная машина по п. 1 или 2, которая содержит фрикционный элемент (13), расположенный между поршнем (3) и шатуном (2), предпочтительно в полости поршня (3).
9. Ковочная машина по п. 1 или 2, в которой между эксцентриковым валом (1) и шатуном (2) расположен подшипник (12).
10. Ковочная машина по п. 1, в которой отсоединяющие приспособления содержат гидравлическое опорное кольцо или электромеханические зажимы, коаксиальные молоту, или приспособления для отцепления шатуна, выполненные с возможностью смещения шатуна во внеосевое положение относительно второй оси (Y), причем шатун имеет регулируемую длину.
11. Ковочная машина по п. 1 или 2, которая содержит молоты, выполненные с возможностью радиального перемещения относительно продольной оси перемещения обрабатываемого изделия, при этом эксцентриковые валы (1) отдельных молотов соединены кинематической цепью, выполненной с возможностью синхронизации рабочих ходов молотов.
12. Способ переключения режимов работы ковочной машины по п. 1, включающий переключение режима работы ковочной машины в качестве ротационной ковочной машины, при котором поршень (3) молота соединен с шатуном (2) с обеспечением приведения молота в возвратно-поступательное движение механически посредством узла эксцентрикового вала (1) с шатуном (2), при этом первая гидравлическая камера (6) обеспечивает регулирование среднего рабочего положения молота вдоль второй оси (Y), в режим работы ковочной машины в качестве ковочного пресса, которое осуществляют путем отсоединения поршня (3) от шатуна (2) посредством отсоединяющих приспособлений с обеспечением приведения молота в возвратно-поступательное движение гидравлически с чередованием впуска и выпуска жидкости из первой гидравлической камеры (6).
13. Способ по п. 12, в котором при работе ковочной машины в режиме ротационной ковочной машины клин (7) располагают в указанном втором рабочем положении с заранее заданным зазором между клином (7) и поршнем (3), а после отсоединения поршня (3) от шатуна (2) клин (7) располагают в первом рабочем положении с обеспечением контакта клина (7) с поршнем (3).
14. Способ переключения режимов работы ковочной машины по п. 1, включающий переключение режима работы ковочной машины в качестве ковочного пресса, при котором поршень (3) молота отсоединен от шатуна (2) посредством отсоединяющих приспособлений с обеспечением приведения молота в возвратно-поступательное движение гидравлически с чередованием впуска и выпуска жидкости из первой гидравлической камеры (6), в режим работы ковочной машины в качестве ротационной ковочной машины, которое осуществляют путем соединения поршня (3) с шатуном (2) с обеспечением приведения молота в возвратно-поступательное движение механически посредством узла эксцентрикового вала (1) и шатуна (2), при этом используют первую гидравлическую камеру (6) для регулирования среднего рабочего положения молота вдоль второй оси (Y).
15. Способ по п. 14, в котором при работе ковочной машины в режиме ковочного пресса клин (7) располагают в первом рабочем положении с обеспечением контакта между клином (7) и поршнем (3), а после соединения поршня (3) с шатуном (2) обеспечивают нахождение клина (7) во втором рабочем положении с зазором клином (7) и поршнем (3).
| Сушильная установка для подогрева труб | 1982 |
|
SU1093871A1 |
| Радиально-ковочная машина | 1974 |
|
SU565445A1 |
| Радиально-ковочная машина | 1991 |
|
SU1819181A3 |
| РАДИОЭЛЕКТРОННЫЙ БЛОК | 1999 |
|
RU2157602C1 |

