Изобретение относится к области машиностроения, в частности к тормозному оборудованию, и предназначено для безфрикционного торможения транспортных средств различного исполнения и назначения, в частности для торможения большегрузных автопоездов.
Известен «Индукционный индукторный тормоз» (SU 1515280 Н02K 49/04, 1987), содержащий магнитопровод статора в виде ярма с тремя кольцевыми выступами, между которыми размещены две кольцеобразные обмотки возбуждения, массивный цилиндрический ротор, установленный на валу тормоза концентрично магнитопроводу статора, зубцы-полюса и подшипниковые щиты, отличающийся тем, что ротор установлен с возможностью аксиального перемещения и подпружинен с обеих сторон, а на подшипниковых щитах напротив торцов ротора закреплены фрикционные накладки.
Недостатком данного устройства является, во-первых, наличие фрикционных накладок, приводящих к перегреву устройства, а, во-вторых, невозможность использования в реальных условиях полной остановки вращения вала, так как это приводит к юзовому заносу прицепа автопоезда.
Известен «Индукционный тормоз» (SU 1065991 Н02K 49/04, 1982), содержащий якорь, катушку возбуждения, размещенную в корпусе, отличающийся тем, что он снабжен внешним трубопроводом.
Недостатком данного устройства является, во-первых, необходимость охлаждения тормоза, а, во-вторых, невозможность использования в реальных условиях полной остановки вращения вала, так как это приводит к юзовому заносу прицепа автопоезда.
Известен «Электромагнитный тормоз» (RU 2279577 F16D 49/00, 2005), содержащий корпус, электромагниты, установленный на валу тормозной барабан, источник питания и источник магнитного поля, отличающийся тем, что электромагниты закреплены в верхней части корпуса напротив друг друга, при этом он снабжен тормозной скобой, закрепленной в нижней части корпуса, и катушками с сердечниками, расположенными между электромагнитами радиально на тормозном барабане, выполненном разъемным из двух частей, связанными между собой проводником, намотанным несколькими витками на каждую катушку и образующим замкнутую электрическую цепь, при этом электромагниты и тормозная скоба помещены с зазором относительно тормозного барабана.
Недостатком данного устройства, является, во-первых, некомпенсированный перегрев тормоза, а, во-вторых, невозможность использования в реальных условиях полной остановки вращения вала, так как это приводит к юзовому заносу прицепа автопоезда.
Наиболее близким по технической сущности к предлагаемому изобретению является полезная модель «Малоинерционный индукционный тормоз» (RU 106462 Н02K 49/04, 2009), содержащий статор, магнитопровод, электропроводящий ротор, отличающийся тем, что тормоз снабжен двойным полым ротором и индуктором в виде полого цилиндра, набранного из постоянных магнитов.
Недостатком данного устройства является невозможность использования в реальных условиях полной остановки вращения вала, так как это приводит к юзовому заносу прицепа автопоезда.
Каждый из перечисленных аналогов и прототип обладают недостатками, которые по своей совокупности в полной мере устраняются предлагаемым изобретением, при осуществлении которого открываются возможности расширения арсенала технических средств по созданию универсального динамического тормоза для применения в транспортных средствах различного исполнения и назначения.
Предлагаемое изобретение направлено на повышение эффективности гашения избыточной кинетической энергии транспортного средства во время его остановки. Это достигается тем, что утяжелители, расположенные на вращающихся штоках, благодаря сложному профилю обечайки создают некомпенсированную центробежную силу, создавая линейное тяговое усилие, направленное в противоположную сторону движения транспортного средства.
Общим существенным признаком заявляемого и известного устройства является безфрикционное торможение.
Отличительными существенными признаками предлагаемого устройства являются: обечайки, жестко закрепленные на корпусе тормоза; штоки, вращающиеся внутри обечайки по сложной траектории; утяжелители, жестко закрепленные на штоках.
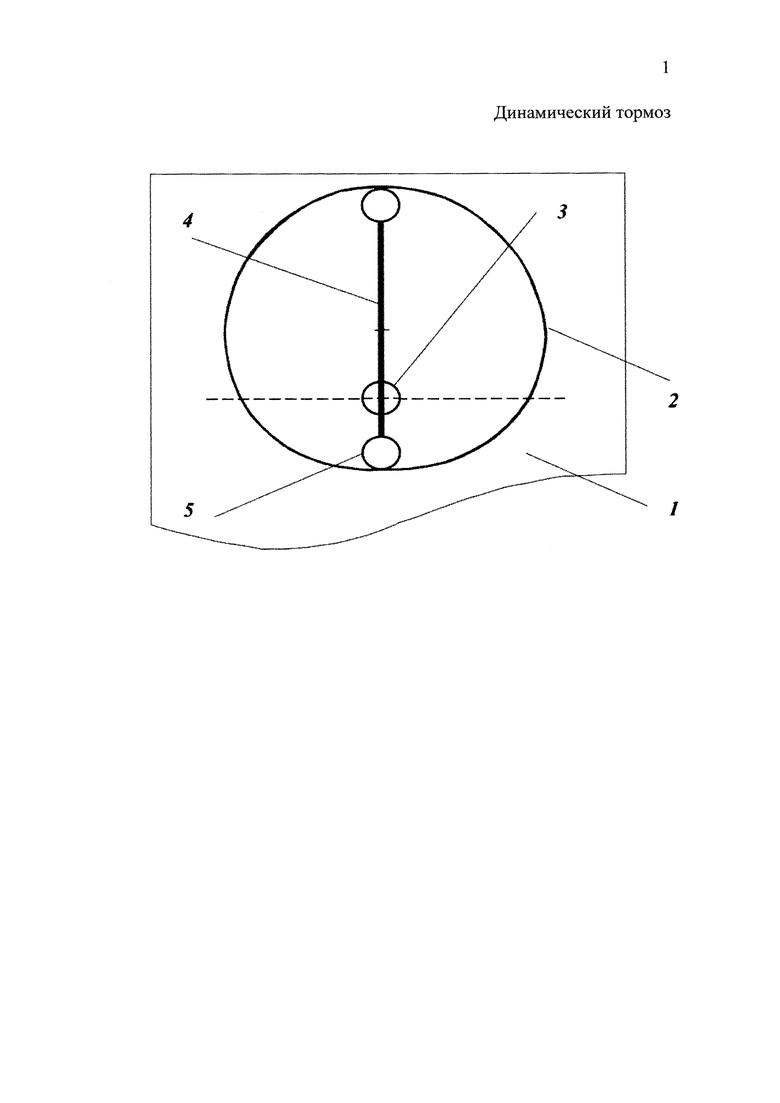
Основные элементы конструкции динамического тормоза, обеспечивающие заявляемый эффект, представлены на рисунке.
На корпусе устройства (п. 1) методом жесткого крепления устанавливаются две обечайки (п. 2) таким образом, чтобы их геометрические центры совпадали между собой и не совпадали с центром вращения штоков, редуктор (не показан), ведущий вал (не показан) с возможностью свободного вращения вокруг собственной оси, передающий вращательный момент редуктору, который обеспечивает синхронное вращение двух своих выходных валов в противоположных направлениях. На выходных валах редуктоpa с противоположных сторон жестко крепятся держатели (п. 3), внутри которых размещаются штоки (п. 4), так чтобы они могли в них свободно двигаться по траектории профиля обечайки. На штоках жестко крепятся утяжелители (п. 5).
Геометрический центр каждой обечайки смещен относительно центра вращения держателей штоков на величину, определяющую дисбаланс конструкции. Профиль каждой обечайки выбирается таким образом, чтобы обеспечивалось условие, при котором все хорды ее окружности, проходящие через центр вращения штоков, были равны между собой и имели длину на 0,5 мм больше длины штоков.
При передаче вращательного движения на вал, а через него на держатели штоков последние синхронно приводятся во вращение в противоположных направлениях. Благодаря тому, что геометрический центр обечайки смещен относительно центра вращения штоков, который совпадает с центром вращения держателей штоков, в конструкции существует направление, при котором создается максимальная разница центробежных сил на концах штоков.
В точке максимального удаления одного из концов штока от центра своего вращения создается некомпенсированная центробежная сила, которая, воздействуя на обечайку, передает корпусу тормоза линейное тяговое усилие, направленное в противоположную сторону движения транспортного средства, обеспечивая его торможение.
В качестве теоретического обоснования работоспособности предлагаемого устройства используются известные законы механики вращательного движения. Известна зависимость центробежной силы от параметров вращательного движения [1]:
F(цб)=m*ω2*R
F(цб) - центробежная сила (Н);
m - масса вращающегося на орбите тела (кг);
ω - угловая скорость вращения (рад/с);
R - радиус вращения тела (м).
Если два тела с одинаковой массой находятся на одной радиальной прямой с противоположных сторон от центра вращения, то между ними возникает разница действующих на них центробежных сил:
ΔF(цб)=m*ω2*ΔR
ΔF(цб) - разница центробежных сил двух утяжелителей, по направлению дисбаланса конструкции; тормозная тяга (Н);
ΔR - дисбаланс конструкции: разница между максимальным и минимальным радиусом вращения концов штока (м).
Тяговое усилие тягача, необходимое для движения автопоезда, можно определить из эмпирического выражения:
F(к)=k*m*u
где
F(к) - крейсерская тяга (Н),
k - эмпирический коэффициент пропорциональности (0,01 с-1),
m - снаряженная масса автопоезда (кг),
u - скорость движения автопоезда (м/с).
Полное торможение автопоезда обеспечивается при условии: тормозная тяга равна крейсерской тяге:
ΔF(цб)=F(к)
Если снаряженная масса автопоезда равна 50000 кг (50 т), а его скорость 30 м/с (108 км/ч), то крейсерская тяга автопоезда равна 15000 Н (1500 кгс).
При угловой скорости вращения штоков 314 рад/с (3000 об/мин) и дисбалансе 0,2 м достаточная масса одного утяжелителя равна 0,4 кг.
Для обеспечения работы тормоза в этом случае понадобится электродвигатель мощностью не более 2 кВт.
Работа предлагаемого динамического тормоза при установке его на транспортном средстве осуществляется следующим образом. При нажатии на педаль тормоза сразу же запускается электродвигатель динамического тормоза и начинается вращение штоков. По мере увеличения частоты их вращения, увеличивается тормозная тяга, направленная в противоположную сторону движения транспортного средства.
Интенсивность торможения динамического тормоза определяется допустимой перегрузкой, которую может испытывать транспортное средство при торможении. Зависимость перегрузки и тормозного пути от реализованной мощности торможения при максимальной тяге 15000 Н, скорости 30 м/с (108 км/ч) и снаряженной массе автопоезда 50 т, представлена в таблице:

Техническим результатом, который достигается при использовании изобретения - «динамический тормоз», является возможность создания эффективных тормозных систем на различных транспортных средствах.
При использовании на автопоездах динамический тормоз устанавливается над последней осью прицепа, что обеспечивает устойчивое движение автопоезда, как в сложных дорожных условиях, так и в случае экстренного торможения, исключая возможность складывания при этом автопоезда.
При использовании на железнодорожном транспорте динамический тормоз устанавливается над каждой осью вагона, обеспечивая при этом устойчивое торможение состава в самых различных дорожных ситуациях.
При использовании на воздушном транспорте динамический тормоз устанавливается в хвостовой части самолета, обеспечивая значительное сокращение необходимой посадочной полосы.
Изобретение имеет народнохозяйственное значение, позволяющее создавать эффективные системы безопасности транспортных средств, не имеющих в настоящее время аналогов.
Источник:
1. Яворский Б.М., Детлаф А.А. Справочник по физике. - М.: Наука, 1964, с. 33.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИЙ ТОРМОЗ | 2018 |
|
RU2682517C1 |
| ТОРМОЗ ПРИЦЕПА | 2019 |
|
RU2729334C1 |
| Стенд для исследования тормозных свойств прицепов, оборудованных инерционной тормозной системой | 1990 |
|
SU1783346A1 |
| ЗАМКОВО-ТОРМОЗНОЕ УСТРОЙСТВО | 1992 |
|
RU2082637C1 |
| Пневматический привод тормозов автопоезда | 1985 |
|
SU1303462A2 |
| СПОСОБ ЭФФЕКТИВНОГО ТОРМОЖЕНИЯ ПРИЦЕПОВ ЛЕГКОВЫХ АВТОМОБИЛЕЙ | 2005 |
|
RU2323110C2 |
| Тормозная система прицепа | 1977 |
|
SU937250A1 |
| Тормозная система автопоезда | 1989 |
|
SU1654068A1 |
| Тормоз наката одноосного прицепа | 2023 |
|
RU2805422C1 |
| Пневматический привод тормозов автопоезда | 1984 |
|
SU1162645A1 |
Изобретение относится к области машиностроения, в частности к тормозному оборудованию, и предназначено для безфрикционного торможения транспортных средств. Динамический тормоз содержит корпус, внутри которого имеется ведущий вал и редуктор, синхронно распределяющий вращательное движение в противоположных направлениях. На корпусе жестко крепятся две обечайки таким образом, чтобы их геометрические центры совпадали между собой и не совпадали с центром вращения штоков. На выходных валах редуктора жестко крепятся направляющие держатели, внутри которых размещаются свободно двигающиеся штоки, траектория движения которых определяется профилем обечайки из условия, что все хорды ее окружности, проходящие через центр вращения штоков, равны между собой. На концах штоков жестко крепятся утяжелители. Достигается повышение эффективности тормозной системы. 1 ил.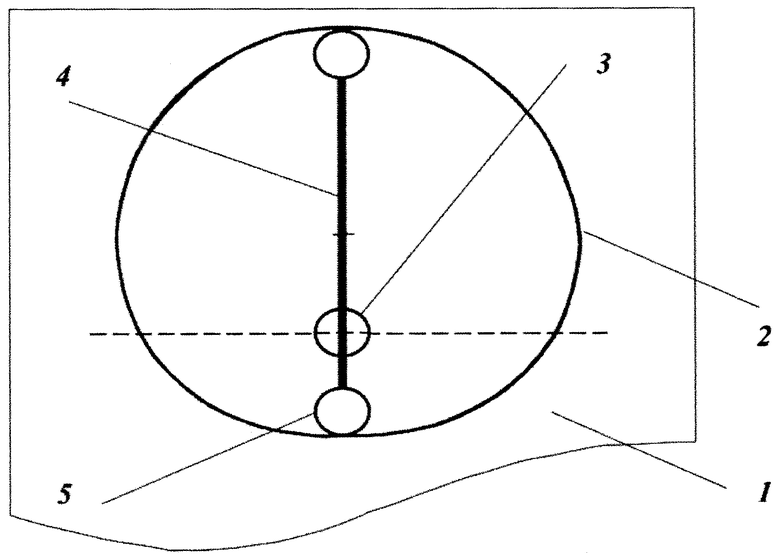
Динамический тормоз, содержащий корпус, внутри которого имеется ведущий вал и редуктор, синхронно распределяющий вращательное движение в противоположных направлениях, отличающийся тем, что на корпусе жестко крепятся две обечайки таким образом, чтобы их геометрические центры совпадали между собой и не совпадали с центром вращения штоков; на выходных валах редуктора жестко крепятся направляющие держатели, внутри которых размещаются свободно двигающиеся штоки, траектория движения которых определяется профилем обечайки из условия, что все хорды ее окружности, проходящие через центр вращения штоков, равны между собой, а на концах штоков жестко крепятся утяжелители.
| Смесь цветная для покрытия пешеходных дорожек | 1956 |
|
SU106462A1 |
| Инерционный импульсный рекуперативный тормоз | 1984 |
|
SU1275165A1 |
| Тормозное устройство | 1985 |
|
SU1337576A2 |
| Индукционный индукторный тормоз | 1987 |
|
SU1515280A1 |
| DE 19627980 A1, 16.01.1997. | |||

