Изобретение относится к области машиностроения, в частности к тормозному оборудованию, и предназначено для бесфрикционного торможения транспортных средств различного исполнения и назначения, в частности для торможения большегрузных автопоездов.
Известен «Инерционный движитель» (SU 1002707 F16H 33/44, 1981) содержащий входной вал, установленное на нем ведущее звено, в виде прямолинейной направляющей, в пазу которого расположен инерционный элемент в виде двух жестко связанных масс, имеющих ролики. Последние поочередно взаимодействуют с упором, выполненным в виде неподвижного кольца, расположенного эксцентрично оси входного вала и являющегося опорным элементом инерционного движителя.
Недостатком данного устройства является, во-первых, конструкция ведущего звена в виде линейной направляющей с пазами, что создает избыточное трение при движении связанных масс, во-вторых, массы создают дополнительную нагрузку в их жесткой связке, в-третьих связка масс не ограничена в пазу по вертикальному положению, что может привести к ее выходу из держателя при значительной тряске всего устройства, в условиях применения его на транспортном средстве, что в совокупности в значительной мере ограничивает эксплуатационные характеристики заявленного устройства.
Наиболее близким по технической сущности к предлагаемому изобретению является устройство «Динамический тормоз» (RU 2652330 F16D 43/14 2017) содержащее корпус, внутри которого имеется ведущий вал и редуктор, синхронно распределяющий вращательное движение в противоположных направлениях. На корпусе жестко крепятся две обечайки таким образом, чтобы их геометрические центры совпадали между собой и не совпадали с центром вращения штоков. На выходных валах редуктора жестко крепятся направляющие держатели, внутри которых размещаются свободно двигающиеся штоки, траектория движения которых определяется профилем обечайки из условия, что все хорды ее окружности, проходящие через центр вращения штоков, равны между собой. На концах штоков жестко крепятся утяжелители.
Недостатком данного устройства является то, что утяжелители крепятся на штоках жестко, что создает в последних дополнительную нагрузку на разрыв, за счет действия центробежных сил утяжелителей в противоположных направлениях, что в значительной мере ограничивает эксплуатационные характеристики заявленного устройства, а также то, что при установке в конструкции дополнительного штока, с целью увеличения частоты тягового импульса, это влечет за собой увеличение габаритных размеров всего устройства, поскольку конструктивно дополнительные штоки не могут быть установлены в одной плоскости.
Аналог и прототип обладают недостатками, которые по своей совокупности в полной мере устраняются предлагаемым изобретением, при осуществлении которого открываются возможности расширения арсенала технических средств по созданию универсального динамического тормоза для применения в транспортных средствах различного исполнения и назначения.
Предлагаемое изобретение направлено на повышение эффективности гашения избыточной кинетической энергии транспортного средства во время его остановки. Это достигается тем, что утяжелители, расположенные на вращающихся штоках и свободно по ним перемещающиеся, благодаря разности хода внутри обечайки по линии максимального дисбаланса создают некомпенсированную центробежную силу, формируя при этом линейное тяговое усилие, направленное в противоположную сторону движения транспортного средства.
Общим существенным признаком заявляемого и известного устройства является бесфрикционное торможение.
Отличительными существенными признаками предлагаемого устройства являются: обечайка, жестко закрепленная на корпусе тормоза имеющая более широкий диапазон геометрических профилей; штоки, жестко соединенные с держателем, осуществляющим их вращение; утяжелители, свободно перемещающиеся на штоках.
Основные элементы конструкции динамического тормоза обеспечивающие заявляемый эффект представлены на рисунке.
Динамический тормоз содержит корпус (п. 1), внутри которого имеется ведущий вал и редуктор, синхронно распределяющий вращательное движение в противоположных направлениях. На корпусе жестко крепятся две обечайки (п. 2) таким образом, чтобы их профили совпадали друг с другом. На выходных валах редуктора жестко крепятся держатели (п. 3) в которых симметрично, относительно друг друга, жестко крепятся не менее двух штоков (п. 4), таким образом, чтобы они имели возможность выхода за контур обечаек, на штоках размещаются утяжелители (п. 5) произвольной формы, так, чтобы они могли свободно перемещаться по штокам внутри обечаек, от держателя до обечайки и обратно, и при необходимости имели возможность вращения вокруг собственного центра, при этом профиль обечаек может иметь произвольную форму и выбирается таким образом, чтобы обеспечивалось условие, при котором отношение наибольшего и наименьшего хода утяжелителей внутри обечаек находилось в интервале от 1,1 до 11, а отношение радиусов кривизны обечаек в самой удаленной точке от центра вращения держателя штоков к самой близкой противоположной находилось в интервале от 0,1 до 10, при этом в перпендикулярном направлении центр вращения держателей находится посредине хорды обечаек проходящей через этот центр, а отношение радиусов кривизны обечаек на концах этой хорды находится в отношении равным 1.
При передаче вращательного движения на вал, а через него на держатели штоков последние синхронно приводятся во вращение в противоположных направлениях. Благодаря тому, что утяжелители имеют возможность свободно перемещаться по штокам внутри обечаек под воздействием центробежной силы, они занимают положения на штоках ограниченные профилем обечайки.
В точке максимального удаления обечайки от центра вращения держателя, в утяжелителе формируется наибольшая центробежная сила, в противоположной точке наименьшая. В результате в этом направлении формируется некомпенсированная центробежная сила, которая, воздействуя на обечайку, передает корпусу тормоза линейное тяговое усилие, направленное в противоположную сторону движения транспортного средства, обеспечивая его торможение.
В качестве теоретического обоснования работоспособности предлагаемого устройства используются известные законы механики вращательного движения. Известна зависимость центробежной силы от параметров вращательного движения [1]:
F(цб)=m*ω2*R,
F(цб) - центробежная сила (Н);
m - масса, вращающегося на орбите тела (кг);
ω - угловая скорость вращения (рад/с);
R(ω) - радиус вращения тела (м).
Если два тела с одинаковой массой находятся на одной радиальной прямой с противоположных сторон от центра вращения, то между ними возникает разница действующих на них центробежных сил:
ΔF(цб)=m*ω2*ΔR(ω);
ΔF(цб) - разница центробежных сил двух утяжелителей, по направлению дисбаланса конструкции; тормозная тяга (Н);
ΔR(ω) - дисбаланс конструкции: разница между наибольшим и наименьшим ходом утяжелителей внутри обечайки (м).
Радиус кривизны в области обечайки самой удаленной от центра вращения держателя влияет на динамическую характеристику тормоза: чем меньше радиус кривизны обечайки в этом месте, тем больше быстродействие тормоза и соответственно выше его эффективность, так как соответственно увеличиваются разгонные ускорения утяжелителей при прохождении этой части траектории. Конкретное соотношение радиусов кривизны обечайки с противоположных сторон по линии дисбаланса в интервале от 0,1 до 10 определяются конкретными условиями эксплуатации динамического тормоза. В интервале отношений указанных радиусов от 0,1 до 1 динамический тормоз обладает более жесткой характеристикой торможения, а в интервале от 1 до 10 более мягкой, что может быть использовано в парном применении динамического тормоза. В этом случае «мягкий» тормоз используется в штатном режиме торможения, а более «жесткий» при экстренном торможении.
Условия фиксации утяжелителей на штоках определяют соотношение баланса формирования максимальной тяги динамического тормоза и необходимой для этого минимальной мощности электродвигателя.
При использовании утяжелителей без возможности вращения вокруг собственного центра реализуется возможность создания максимальной тяги за счет увеличения площади контакта утяжелителя с обечайкой. При этом за счет трения скольжения необходима большая мощность электродвигателя.
При использовании утяжелителей с возможностью вращения вокруг собственного центра достигается возможность минимизации мощности электродвигателя, за счет трения качения между утяжелителем и обечайкой, при этом пропорционально снижается максимально возможная тяга динамического тормоза при прочих равных динамических параметрах (число оборотов, масса утяжелителей, величина хода утяжелителей по штоку, прочностные характеристики материалов утяжелителей и обечаек, и т.д.), за счет уменьшения площади контакта утяжелителя с обечайкой.
Количество используемых парных штоков определяет частоту тормозного импульса по формуле:
n(F)=k*n (имп/с),
k - количество штоков (2, 4 …);
n - частота вращения штоков (об/с);
при n=50 об/с (3000 об/мин);
n(F)=100 имп/с при k=2;
n(F)=200 имп/с при k=4 и т.д.
Таким образом, при увеличении числа штоков пропорционально увеличивается эффективность динамического тормоза.
Тяговое усилие тягача необходимое для движения автопоезда можно определить из эмпирического выражения:
F(к)=k*m*u,
где F(к) - крейсерская тяга (Н);
k - эмпирический коэффициент пропорциональности (0,01 с-1);
m - снаряженная масса автопоезда (кг);
u - скорость движения автопоезда (м/с).
Полное торможение автопоезда обеспечивается при условии: тормозная тяга равна крейсерской тяге:
ΔF(цб)=F(к).
Если снаряженная масса автопоезда равна 50000 кг (50 т), а скорость 30 м/с (108 км/ч), то крейсерская тяга автопоезда равна 15000 Н (1500 кгс).
При угловой скорости вращения штоков 314 рад/с (3000 об/мин) и дисбалансе 0,2 м достаточная масса одного утяжелителя равна 0,4 кг.
Для обеспечения работы тормоза с четырьмя штоками с вращающимися вокруг собственного центра утяжелителями в этом случае понадобится электродвигатель мощностью не более 3 кВт.
Работа предлагаемого динамического тормоза при установке его на транспортном средстве осуществляется следующим образом. При нажатии на педаль тормоза сразу же запускается электродвигатель динамического тормоза и начинается вращение штоков. По мере увеличения частоты их вращения, увеличивается тормозная тяга, направленная в противоположную сторону движения транспортного средства.
Интенсивность торможения динамического тормоза определяется допустимой перегрузкой, которую может испытывать транспортное средство при торможении. Зависимость перегрузки и тормозного пути от реализованной мощности торможения при максимальной тяге 15000 Н, скорости 30 м/с (108 км/ч) и снаряженной массе автопоезда 50 т, представлена в таблице:

Технический результат, который достигается при использовании изобретения - «динамический тормоз», является возможность создания эффективных тормозных систем на различных транспортных средствах.
При использовании на автопоездах динамический тормоз устанавливается над последней осью прицепа, что обеспечивает устойчивое движение автопоезда, как в сложных дорожных условиях, так и в случае экстренного торможения, исключая возможность складывания при этом автопоезда.
При использовании на железнодорожном транспорте динамический тормоз устанавливается над каждой осью вагона, обеспечивая при этом устойчивое торможение состава в самых различных дорожных ситуациях.
При использовании на воздушном транспорте динамический тормоз устанавливается в хвостовой части самолета, обеспечивая значительное сокращение необходимой посадочной полосы.
При использовании на водном транспорте блок динамических тормозов необходимой суммарной тяги устанавливается в кормовой части судна, обеспечивая сокращение его тормозного пути до значения, ограниченного допустимой перегрузкой судна во время торможения до полной остановки.
Изобретение имеет народнохозяйственное значение, позволяющее создавать эффективные системы безопасности транспортных средств, не имеющих в настоящее время аналогов.
Источник
1. Яворский Б.М., Детлаф А.А. Справочник по физике. - М.: Наука, 1964, с. 38.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИЙ ТОРМОЗ | 2017 |
|
RU2652330C1 |
| СПОСОБ СОЗДАНИЯ ТЯГИ И ЭНЕРГО-ДВИГАТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 2016 |
|
RU2630275C2 |
| ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО | 2018 |
|
RU2699003C1 |
| Пневматический привод тормозов автопоезда | 1985 |
|
SU1303462A2 |
| ТОРМОЗ ПРИЦЕПА | 2019 |
|
RU2729334C1 |
| Способ управления поворотом полуприцепа с блокируемой тележкой и устройство для его осуществления | 1980 |
|
SU925726A1 |
| ТЕЛЕЖКА СКОРОСТНОГО ГРУЗОВОГО ВАГОНА В.В. БОДРОВА | 2015 |
|
RU2602006C2 |
| УЗЕЛ КРЕПЛЕНИЯ ПРИВОДА ДИСКОВОГО ТОРМОЗА | 2004 |
|
RU2264940C1 |
| Система управления транспортного средства | 1985 |
|
SU1311954A1 |
| Транспортное средство и внутритрубный движитель динамического типа для него | 2017 |
|
RU2668367C1 |

Изобретение относится к области машиностроения. Динамический тормоз содержит корпус, внутри которого имеется ведущий вал и редуктор, синхронно распределяющий вращательное движение в противоположных направлениях. На корпусе жестко крепятся две обечайки таким образом, чтобы их профили совпадали друг с другом. На выходных валах редуктора жестко крепятся держатели, в которых симметрично относительно друг друга жестко крепятся не менее двух штоков таким образом, чтобы они имели возможность выхода за контур обечаек, на штоках размещаются утяжелители так, чтобы они могли свободно перемещаться по штокам внутри обечаек, от держателя до обечайки и обратно, и при необходимости имели возможность вращения вокруг собственного центра. Профиль обечаек выбирается таким образом, чтобы обеспечивалось условие, при котором отношение наибольшего и наименьшего хода утяжелителей внутри обечаек находилось в интервале от 1,1 до 11. В перпендикулярном направлении центр вращения держателей находится посередине хорды обечаек, проходящей через этот центр. Достигается повышение эффективности тормозной системы. 1 ил., 1 табл.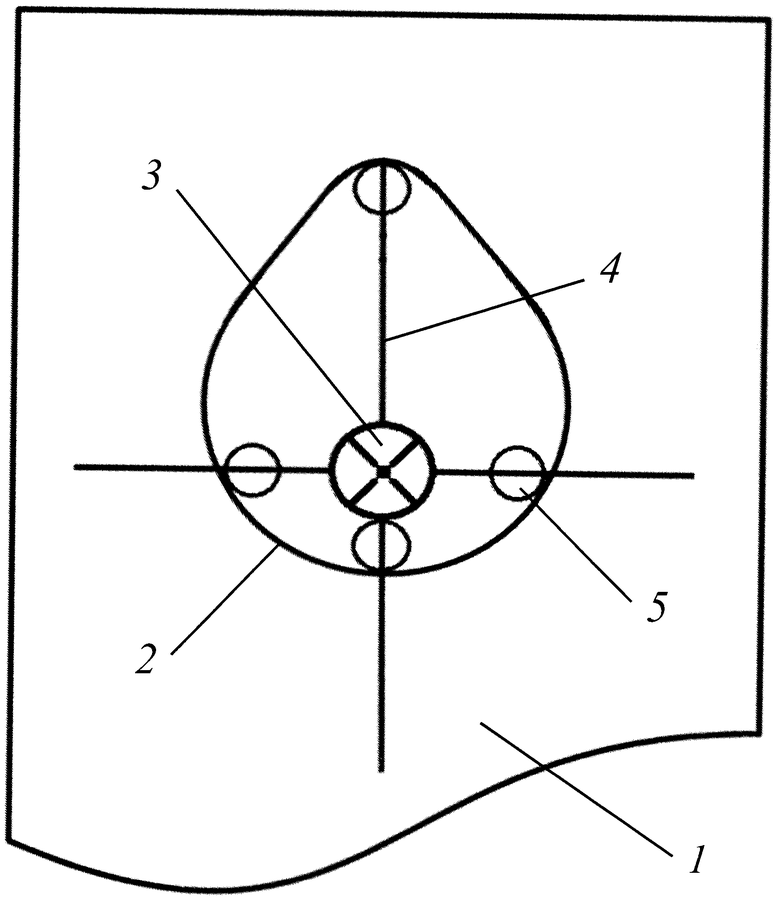
Динамический тормоз, содержащий корпус, внутри которого имеется ведущий вал и редуктор, синхронно распределяющий вращательное движение в противоположных направлениях, на выходных валах редуктора жестко крепятся держатели, на корпусе жестко закреплены две обечайки так, чтобы их профили совпадали друг с другом, отличающийся тем, что в держателях симметрично относительно друг друга жестко крепятся не менее двух штоков таким образом, чтобы они имели возможность выхода за контур обечаек, на штоках размещаются утяжелители произвольной формы так, чтобы они могли свободно перемещаться по штокам внутри обечаек, от держателя до обечайки и обратно, и при необходимости имели возможность вращения вокруг собственного центра, при этом профиль обечаек может иметь произвольную форму и выбирается таким образом, чтобы обеспечивалось условие, при котором отношение наибольшего и наименьшего хода утяжелителей внутри обечаек находилось в интервале от 1,1 до 11, а отношение радиусов кривизны обечаек в самой удаленной точке от центра вращения держателя штоков к самой близкой противоположной находилось в интервале от 0,1 до 10, при этом в перпендикулярном направлении центр вращения держателей находится посередине хорды обечаек, проходящей через этот центр, а отношение радиусов кривизны обечаек на концах этой хорды находится в отношении равном 1.
| ДИНАМИЧЕСКИЙ ТОРМОЗ | 2017 |
|
RU2652330C1 |
| Инерционный движитель | 1981 |
|
SU1002707A1 |
| Смесь цветная для покрытия пешеходных дорожек | 1956 |
|
SU106462A1 |
| Инерционный импульсный рекуперативный тормоз | 1984 |
|
SU1275165A1 |
| Тормозное устройство | 1985 |
|
SU1337576A2 |
| DE 19627980 A1, 16.01.1997. | |||

