Изобретение относится к измерительному и испытательному оборудованию, в частности к устройствам для измерения усилия расчленения соединителей, в том числе многоштырьковых.
Наиболее близким аналогом заявляемого изобретения является техническое решение, известное из патента JP Н10315063, представляющее собой устройство для измерения усилия сочленения и расчленения. Установка конструктивно состоит из основания и двух базовых плит, одна из которых подвижная. Базовые плиты расположены на одной оси. Установка также содержит тензометрический датчик, расположенный на одной из базовых плит, и контроллер местоположения базовых плит. Установка позволяет проводить измерение усилия сочленения и расчленения соединителей в одном цикле испытаний.
Однако в данной конструкции используется механизм скольжения, основанный на гидравлическом поршне, который требует тщательной настройки и чувствительной высокоточной электронной настройки, что требует применения дополнительных элементов управления устройства, усложняет конструкцию и настройку устройства, а также снижают ее надежность.
Техническая проблема, на решение которой направлено заявляемое изобретение, заключается в сложности конструкции и недостаточной надежности известных установок для измерения усилия сочленения и расчленения соединителей.
Техническим результатом заявляемого изобретения является повышение точности измерения усилия сочленения и расчленения, в том числе за счет увеличения точности перемещения при упрощении конструкции и повышении надежности конструкции и измерений.
Указанный технический результат достигается за счет того, что установка для измерения усилия сочленения и расчленения соединителей содержит основание, неподвижную и подвижную базовые плиты, две обоймы, выполненные с возможностью размещения в обоймах разъемов, шаговый двигатель с ходовым винтом, тензометрический датчик и модуль управления, выполненный с возможностью хранения информации об обоймах, при этом неподвижная и подвижная базовые плиты размещены на основании и соединены направляющими, причем подвижная базовая плита выполнена с возможностью перемещения по направляющим, на подвижной и неподвижной базовых плитах размещено по обойме посредством штифтовой посадки, тензометрический датчик соединен с неподвижной базовой плитой посредством кулисного механизма, а подвижная базовая плита соединена с шаговым двигателем с помощью ходового винта.
Установка может быть снабжена сенсорной панелью.
Сенсорная панель может быть вынесена в отдельный корпус, установленный на кронштейне.
Сенсорная панель может быть выполнена с возможностью ввода и редактирования параметров установки.
Сенсорная панель может быть выполнена с возможностью индикации текущих значений параметров и режимов проведения измерения.
Установка конструктивно состоит из базовой механической установки, состоящей из основания, подвижной и неподвижной базовых плит. Подвижная базовая плита приводится в движение с помощью шагового двигателя. Неподвижная базовая плита связана с тензометрическим датчиком, сигнал которого используется для измерения усилия сочленения и/или расчленения испытуемых разъемов. Заявляемая установка позволяет проводить измерение и усилия сочленения, и усилия расчленения соединителей в одном цикле испытаний, что способствует повышению точности измерений.
Расположение неподвижной и подвижной базовых плит на одних и тех же направляющих обеспечивает высокую точность перемещения подвижной базовой плиты относительно неподвижной, связанной тензометрическим датчиком, что способствует повышению точности измерений.
На каждой из базовых плит, подвижной и неподвижной, установлено специализированное посадочное место - обойма, соответствующее типу испытуемого разъема. Применение штифтовой посадки обойм на базовые плиты обеспечивает высокую точность (соосность) перемещения обойм вместе с базовыми плитами, что обеспечивает повышение точности измерений.
Соединение неподвижной базовой плиты с тензометрическим датчиком с помощью кулисного механизма позволяет компенсировать изгиб тензометрического датчика при перемещении базовых плит, что позволяет повысить точность проведения измерений усилий сочленения и расчленения испытуемых соединителей.
Использование ходового винта с приводом от шагового двигателя для перемещения подвижной базовой плиты позволяет значительно повысить точность позиционирования и позволяет однозначно контролировать взаимное расположение и скорость перемещения подвижной базовой плиты относительно неподвижной.
Одновременный контроль модулем управления процессами перемещения с контролем величины усилия тензометрическим датчиком позволяет остановить процесс перемещения при фиксации тензометрическим датчиком величины усилия, превышающего максимально допустимые значения.
Модуль управления с базой данных идентификаторов позволяет однозначно установить требуемые параметры проведения измерений, в том числе скорость перемещения и требуемые зазоры, для соответствующего типа испытуемых разъемов, что обеспечивает точность соблюдения режимов измерения.
Наилучший вариант реализации заявляемого изобретения показан на фигурах 1-6, на которых изображены:
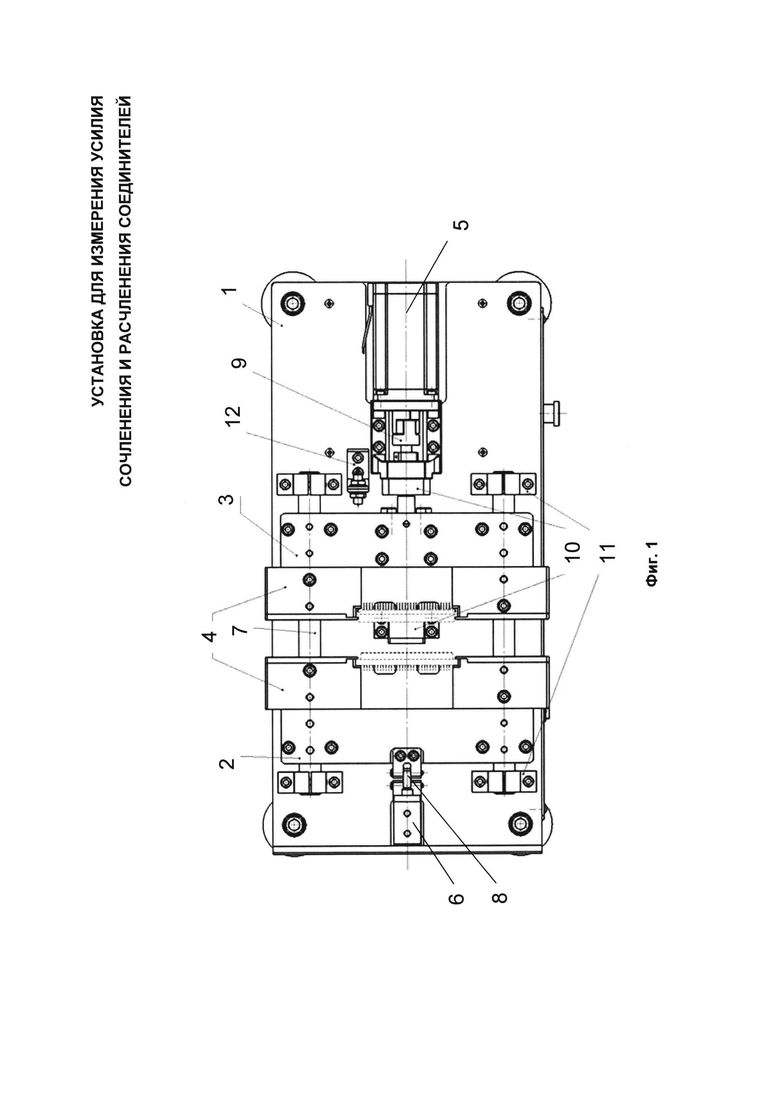
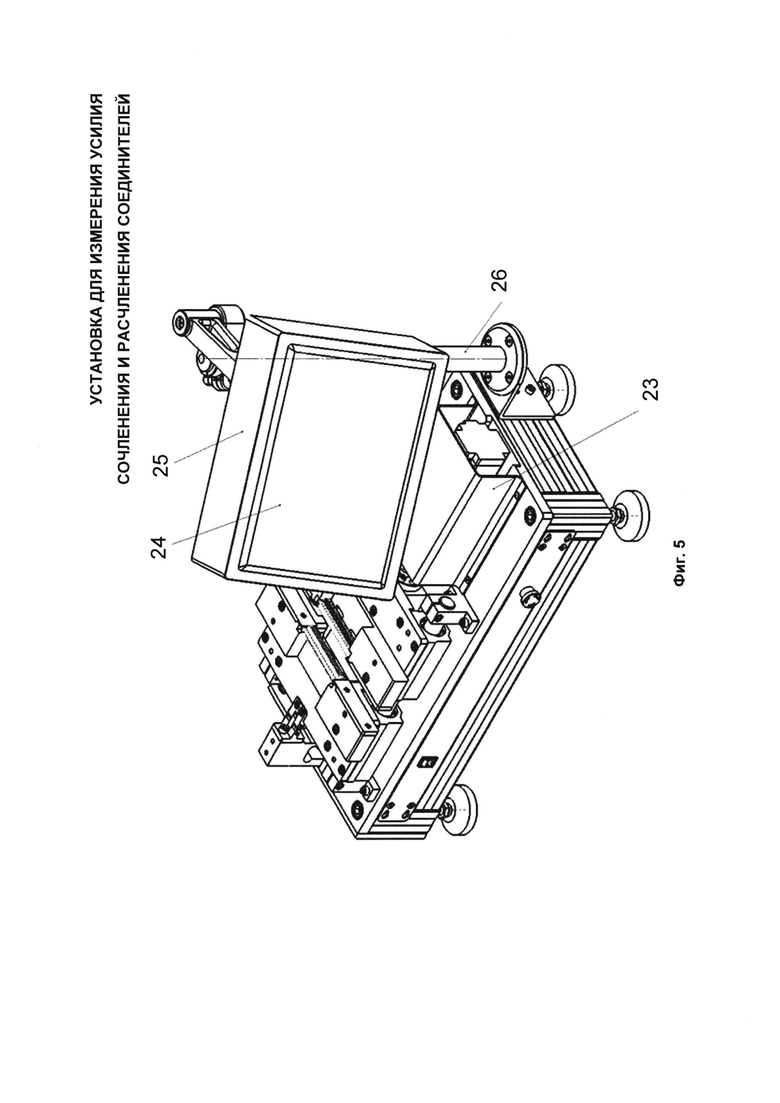
Фиг. 1 - вид установки сверху;
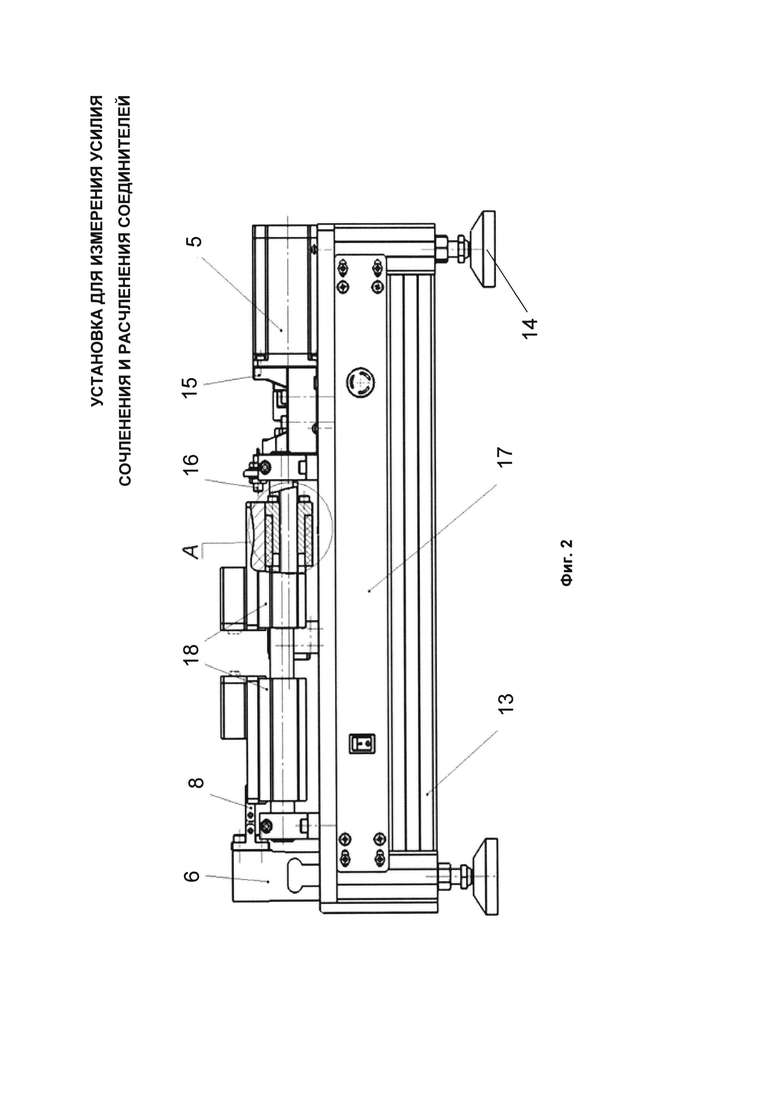
Фиг. 2 - вид установки сбоку;
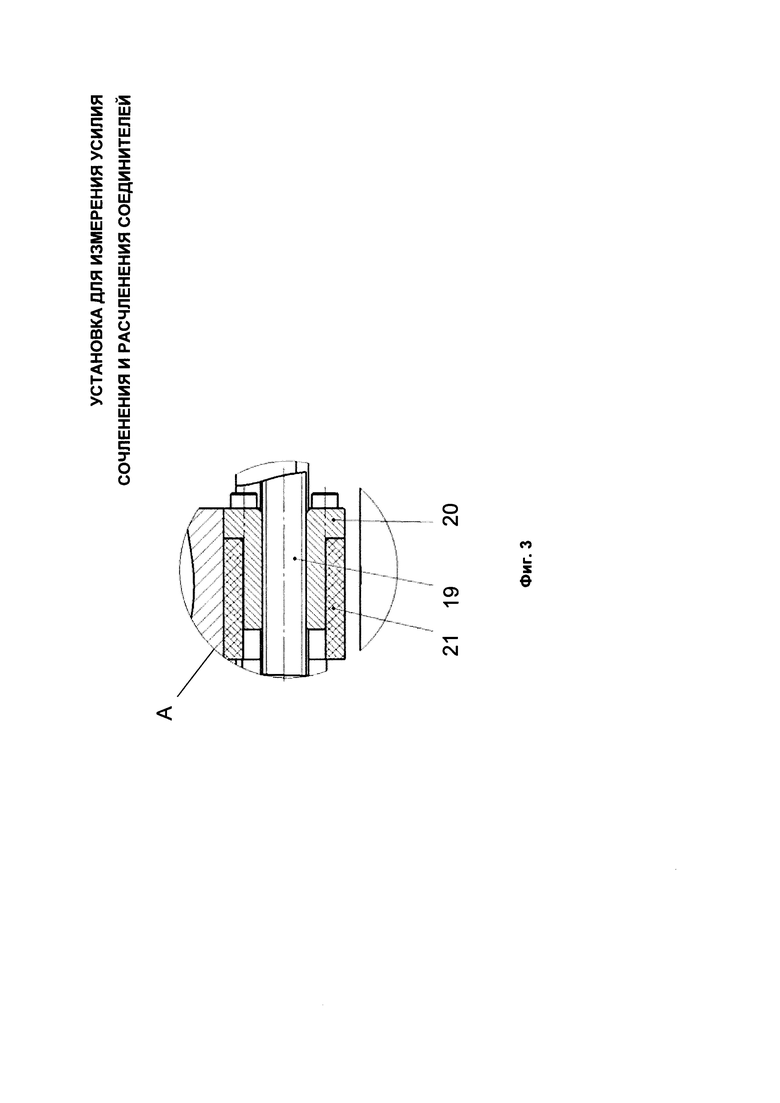
Фиг. 3 - выноска разреза корпуса ходового винта;
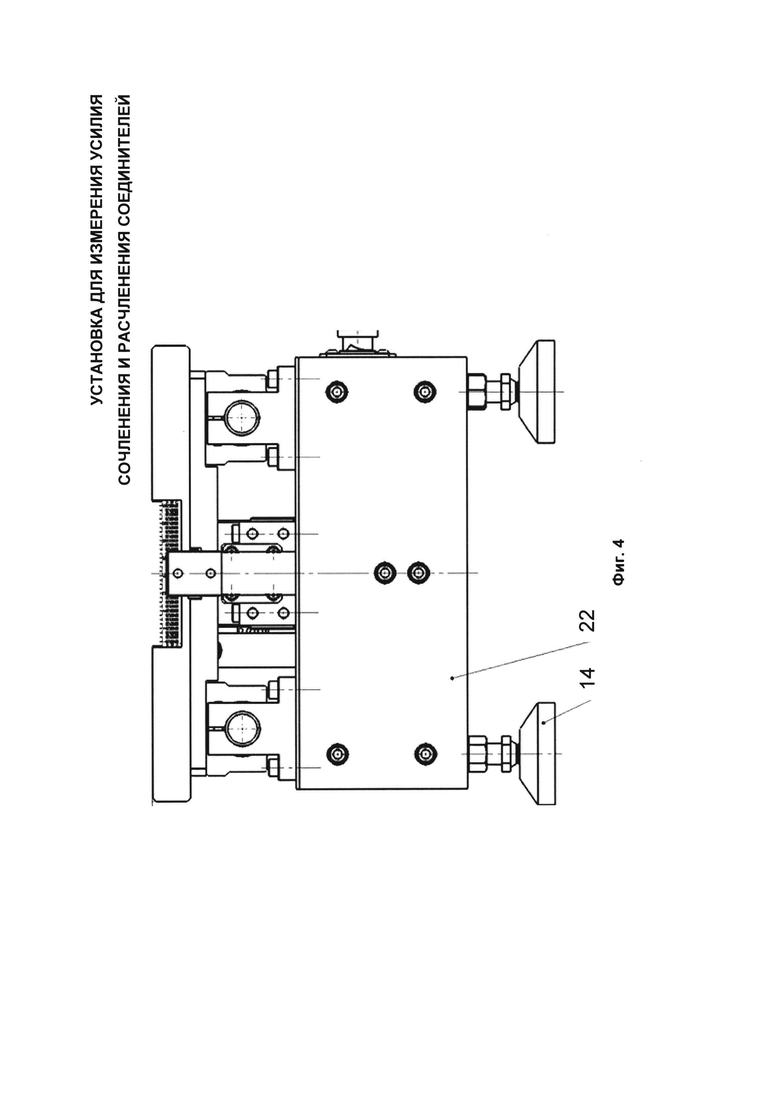
Фиг. 4 - вид установки спереди с торца;
Фиг. 5 - общий вид установки;
Фиг. 6 - кулисный механизм.
На фиг. 1-6 позициями 1-30 показаны:
1 - основание;
2 - неподвижная плита;
3 - подвижная плита;
4 - обойма;
5 - шаговый двигатель;
6 - тензометрический датчик;
7 - направляющая;
8 - кулисный механизм;
9 - муфта;
10 - неподвижная опора;
11 - держатель;
12 - кронштейн концевого выключателя;
13 - каркас;
14 - регулируемая опора;
15 - кронштейн шагового двигателя;
16 - концевой выключатель;
17 - корпус измерительного блока;
18 - модуль с линейным подшипником;
19 - ходовой винт;
20 - гайка;
21 - корпус ходового винта;
22 - поперечина;
23 - защитный кожух;
24 - сенсорная панель;
25 - корпус сенсорной панели;
26 - кронштейн сенсорной панели;
27 - первый кулисный кронштейн;
28 - второго кулисный кронштейн
29 - кулиса;
30 - ось.
Установка для измерения усилия сочленения и расчленения соединителей содержит основание 1, неподвижную 2 и подвижную 3 базовые плиты, две обоймы 4, выполненные с возможностью размещения в них разъемов, шаговый двигатель 5 и тензометрический датчик 6.
Неподвижная 2 и подвижная 3 базовые плиты размещены на основании 1 и соединены направляющими 7.
Тензометрический датчик 6 соединен с неподвижной базовой плитой 2 посредством кулисного механизма 8. Подвижная базовая плита 3 соединена с шаговым двигателем 5.
В данном случае в качестве ходового винта 19 использована шарико-винтовая передача с приводом от шагового двигателя 5.
Выбор двигателя определяется максимальным усилием, которое необходимо развивать, и возможностью осуществлять управляемое вращение с требуемой скоростью, направлением и точностью по командам от модуля управления.
В случае необходимости реализовать большие усилия при сочленении и расчленении с целью устранить возможный «пропуск шагов» и тем самым увеличить точность перемещения на валу шарико-винтовой передачи может быть установлен дополнительно инкрементальный датчик, фиксирующий угловые перемещения с высокой точностью.
В данном случае на один полный оборот 360° шагового двигателя 5 требуется 3200 шагов, что обеспечивает перемещение подвижной базовой плиты 3 на 5 мм. Заявляемое устройство позволяет задавать различную скорость перемещения на разных участках и выдерживать ее значение с достаточно высокой точностью. В данном случае обеспечивается возможность на участке до проведения измерений выставлять эту скорость максимальной для ускорения процесса измерений, а на участке проведения измерений выдерживать ее значение в максимальном соответствии с требованиями ГОСТа или Технических Условий на данную процедуру. При фиксации превышения усилия есть возможность остановить подвижную плиту 3 или начать движение обратно. При этом точно известно положение подвижной плиты 3, т.е. ее текущая координата, где возникло превышение усилия. Таким образом, шаговый двигатель 5 или сервопривод в конкретной реализации в комплексе с шарико-винтовой передачей позволяет одновременно гарантировать и соблюдение установленной скорости, и выполнение перемещений на заданные расстояния с высокой точностью, в данном случае порядка 5 микрометров.
На каждой из базовых плит, подвижной 3 и неподвижной 2, установлено специализированное посадочное место - обойма 4, соответствующая типу испытуемого разъема. На подвижной 3 и неподвижной 2 базовых плитах обоймы 4 размещены посредством штифтовой посадки.
Основание 1 закреплено на каркасе 13 с регулируемыми опорами 14. Шаговый двигатель 5 закреплен на основании 1 посредством кронштейна 15 шагового двигателя.
Вал шагового двигателя 5 соединен с ходовым винтом 19 через муфту 9. Ходовой винт 19 закреплен в неподвижных опорах 10. Гайка 20, крепящаяся через корпус 21 ходового винта 19 к подвижной базовой плите 3, предназначена для преобразования вращательного движения вала шагового двигателя 5 в поступательное.
Возможность скольжения подвижной плиты 3 реализована при помощи модулей 18 с линейным подшипником по направляющим 7, закрепленным в держателях 11. Неподвижная плита 2 также опирается на направляющие 7.
Тензометрический датчик 6 соединен с поперечиной 22, крепящейся к каркасу 13.
Концевой выключатель 16 соединен с основанием 1 при помощи кронштейна 12 концевого выключателя.
Блок управления шаговым двигателем, источник питания, модуль обработки сигналов и контроллер шагового двигателя (не показаны) с тензометрическим датчиком 6 расположены в корпусе 17 измерительного блока.
Защитный кожух 23 закрывает от прямого доступа к вращающимся элементам установки.
Сенсорная панель 24 вставлена в корпус 25 сенсорной панели, выполненный из пластмассы и крепящийся на кронштейне 26 сенсорной панели, и предназначена для управления процессом измерения. Модуль управления и индикации выполнен на основе сенсорной панели 24 модели СПК110.
Кулисный механизм 8 состоит из первого кулисного кронштейна 27, второго кулисного кронштейна 28, кулисы 29 и осей 30.
Устройство работает следующим образом.
Испытуемый разъем помещают в обойму 4: отдельная часть для вилки и отдельная часть для розетки. Затем одна обойма 4, расположенная на подвижной базовой плите 3, приводится в движение по командам от модуля управления, а вторая часть, расположенная на неподвижной базовой плите 2, передает усилие, создающееся при сочленении и расчленении вилки и розетки, на тензометрический датчик 6.
Управление перемещением подвижной базовой плиты 3 осуществляется контроллером шагового двигателя 5 по командам от модуля управления и индикации.
Сигнал тензометрического датчика 6 оцифровывается специализированным АЦП, результаты которого обрабатываются модулем управления и индикации, снабженным микропроцессором. В зависимости от текущего режима работы и полученных данных о величине усилия, по командам от модуля управления и индикации осуществляют протоколирование результатов измерений, изменение направления и скорости перемещения.
Источник питания формирует постоянное напряжение 24 В из напряжения питающей сети 220 В / 50 Гц.
Для уменьшения влияния термо-ЭДС в соединительных проводах от тензометрического датчика 6 до входных (измерительных) цепей АЦП питание тензометрического датчика 6 осуществляется знакопеременным сигналом с последующей цифровой фильтрацией помех от промышленной сети с частотами 50,100 и 150 Гц.
Взаимодействие между модулем управления и индикации и измерительным модулем осуществляется по USB-шине, а между модулем управления и индикации и контроллером шагового двигателя - по протоколу MODBUS-RTU шины RS-485.
При смене типа испытуемого разъема, т.е. иной конструкции крепления испытуемого разъема в обойме 4, производят смену специализированного посадочного места на соответствующее типу испытуемого разъема и осуществляют начальную калибровку установки.
Обоймы 4 для каждого типа испытуемых разъемов имеют идентификатор, сообщающий установке характеристики данного типа: максимально допустимое усилие, скорость перемещения при проведении контрольных измерений усилия, дистанцию, на которой необходимо осуществлять контроль усилия и др.
Приведенные примеры являются частными случаями и не исчерпывают всех возможных реализаций заявляемого изобретения.
Специалисту в данной области техники должно быть понятно, что различные вариации заявляемого устройства не изменяют сущность изобретения, а лишь определяют его конкретные воплощения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАТРОННАЯ СИСТЕМА ФОРМИРОВАНИЯ ИНДИВИДУАЛЬНОГО ИНТРАОПЕРАЦИОННОГО ПОЛОЖЕНИЯ ПАЦИЕНТА | 2022 |
|
RU2803982C1 |
| Радиоэлектронный блок | 1988 |
|
SU1598233A1 |
| КОМПЛЕКС АВТОМАТИЧЕСКОЙ БОНИТИРОВКИ И ПЕРЕВЕСКИ ПТИЦЫ МЯСНЫХ И ЯИЧНЫХ ПОРОД "АГРОБИТ В" | 2023 |
|
RU2816483C1 |
| ПРИБОР ДЛЯ ИСПЫТАНИЯ МЕРЗЛЫХ ГРУНТОВ ШАРИКОВЫМ ШТАМПОМ | 2012 |
|
RU2485474C1 |
| Стенд для испытания механизмов возвратно-поступательного действия | 2021 |
|
RU2791459C2 |
| ЧРЕСКОСТНЫЙ АВТОМАТИЗИРОВАННЫЙ ДИСТРАКЦИОННЫЙ АППАРАТ И АВТОМАТИЧЕСКИЙ УЗЕЛ ПЕРЕМЕЩЕНИЯ | 2021 |
|
RU2763644C1 |
| Тренажер с биологической обратной связью для реабилитации суставов и мышц кистей и пальцев рук | 2020 |
|
RU2735986C1 |
| ИНЕРЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2465712C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО АНАЛИЗА КУЛЬТИ ПАЦИЕНТА | 2021 |
|
RU2768576C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП ДЛЯ ИССЛЕДОВАНИЯ КРУПНОГАБАРИТНЫХ ОБЪЕКТОВ | 2010 |
|
RU2515731C2 |

Изобретение относится к измерительному и испытательному оборудованию, в частности к устройствам для измерения усилия расчленения соединителей, в том числе многоштырьковых. Установка содержит основание, неподвижную и подвижную базовые плиты, две обоймы, выполненные с возможностью размещения в обоймах разъемов, шаговый двигатель с ходовым винтом, тензометрический датчик и модуль управления, выполненный с возможностью хранения информации об обоймах. Неподвижная и подвижная базовые плиты размещены на основании и соединены направляющими. Подвижная базовая плита выполнена с возможностью перемещения по направляющим. На подвижной и неподвижной базовых плитах размещено по обойме посредством штифтовой посадки. Тензометрический датчик соединен с неподвижной базовой плитой посредством кулисного механизма, а подвижная базовая плита соединена с шаговым двигателем с помощью ходового винта. Технический результат: повышение точности измерения усилия сочленения и расчленения, в том числе за счет увеличении точности перемещения при упрощении конструкции и повышении надежности конструкции и измерений. 4 з.п. ф-лы, 6 ил.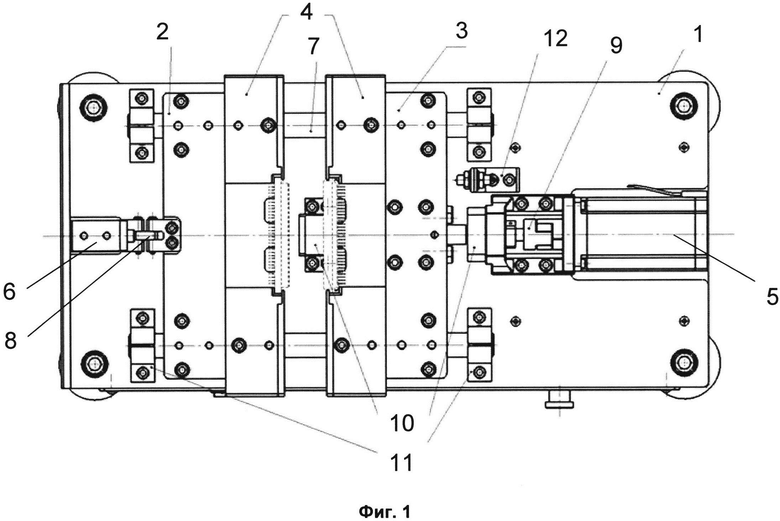
1. Установка для измерения усилия сочленения и расчленения соединителей, характеризующаяся тем, что содержит основание, неподвижную и подвижную базовые плиты, две обоймы, выполненные с возможностью размещения в обоймах разъемов, шаговый двигатель с ходовым винтом, тензометрический датчик и модуль управления, выполненный с возможностью хранения информации об обоймах, при этом неподвижная и подвижная базовые плиты размещены на основании и соединены направляющими, причем подвижная базовая плита выполнена с возможностью перемещения по направляющим, на подвижной и неподвижной базовых плитах размещено по обойме посредством штифтовой посадки, тензометрический датчик соединен с неподвижной базовой плитой посредством кулисного механизма, а подвижная базовая плита соединена с шаговым двигателем с помощью ходового винта.
2. Установка по п. 1, характеризующаяся тем, что снабжена сенсорной панелью.
3. Установка по п. 2, характеризующаяся тем, что сенсорная панель вынесена в отдельный корпус, установленный на кронштейне.
4. Установка по п. 2, характеризующаяся тем, что сенсорная панель выполнена с возможностью ввода и редактирования параметров установки.
5. Установка по п. 2, характеризующаяся тем, что сенсорная панель выполнена с возможностью индикации текущих значений параметров и режимов проведения измерения.
| Пылеугольная горелка для паровозов | 1949 |
|
SU93532A1 |
| Устройство для контроля усилия расчленения разъемных контактов | 1971 |
|
SU535641A1 |
| Устройство для контроля усилия расчленения элементов штепсельных разъемов | 1972 |
|
SU480931A1 |
| US 3430184 A1 25.02.1969. | |||

