Изобретение относится к комбинированным измерительным устройствам, определяющим более чем одну навигационную величину, в частности для контроля полета беспилотного летательного аппарата в режиме реального времени, в том числе дистанционно.
Известно устройство, защищенное патентом «Способ передачи и приема телеметрической и командной информации в одном диапазоне радиочастот многопоточной радиосистемы, и устройство для его осуществления» (патент РФ №2422994, МПК Н04В 7/00, опубл. 27.06.2011, Бюллетень №18).
Известное устройство содержит коммутатор телеметрической информации, входы которого соединены с выходами датчиков, а выход соединен с передатчиком телеметрической информации, бортовую антенну, наземную антенну, блок линейного тракта приемника, последовательно соединенные блок фильтров, блок демодуляторов, регистратор телеметрической информации, последовательно соединенные фильтр-пробка, ключ, выход которого соединен с блоком фильтров; последовательно соединенные формирователь команд командной радиолинии (КРЛ), передатчик сигналов КРЛ, высокочастотный фильтр (ВЧ фильтр), а также приемник сигналов КРЛ, выход которого соединен с дешифратором команд КРЛ, выход 1 которого соединен с входом 1 коммутатора телеметрии (ТЛМ); вход формирователя команд КРЛ соединен с выходом демодулятора блока демодуляторов, выход блока линейного тракта приемника соединен с входом фильтра-пробки и входом 2 ключа, облучатель вертикальной поляризации 1 бортовой антенны соединен с выходом передатчика ТЛМ, а ее излучатель горизонтальной поляризации 2 - с входом приемника сигналов КРЛ; облучатель вертикальной поляризации 1 наземной антенны соединен с входом 1 блока линейного тракта приемника, а ее излучатель горизонтальной поляризации 2 - с выходом фильтра, выходы команд дешифратора соединены с входами устройств-исполнителей команд.
Использование данного устройства при проведении испытаний беспилотных летательных аппаратов, когда необходимы передача и прием как телеметрической, так и командной информации, позволяет добиться экономии радиоспектра (в сравнении с применением разделенных систем КРЛ и ТЛМ) и уменьшить количество передающих и принимающих антенн до одной бортовой и одной наземной.
Однако использование указанного устройства требует применения дополнительных датчиков телеметрии, бортовых навигационных измерительных приборов и другой аппаратуры для измерения параметров полета беспилотного летательного аппарата в процессе проведения летного испытания. При необходимости проведения летного испытания серийно выпускаемых летательных аппаратов с осуществлением контроля местоположения (внешне-траекторные измерения) и передачи команд управления в процессе проведения эксперимента использование устройства затруднено тем, что требует изменения конструкции серийно выпускаемых изделий, т.к. в них не предусмотрены места для установки навигационной аппаратуры контроля местоположения (внешне-траекторных измерений), аппаратуры телеметрии и командной радиолинии, поскольку параметры серийных изделий оптимизированы в процессе разработки и подготовки серийного производства.
Описанное техническое решение ориентировано на передачу многопоточной телеметрической информации с использованием синхронных радиопотоков на нескольких несущих частотах и, кроме того, требует разнесения несущих частот КРЛ и ТЛМ, что приводит к увеличению полосы излучаемого радиосигнала. При проведении летных испытаний нескольких (двух и более) беспилотных летательных аппаратов одновременно с контролем параметров полета каждого из них и возможностью избирательной передачи команд на любой беспилотный летательный аппарат необходимо использование нескольких систем КРЛ и ТЛМ в одном радиочастотном диапазоне, что также приводит к расширению радиоспектра и, в случае использования многопоточных телеметрических систем с высокой информативностью, требует сложных и дорогих технических решений, а также сложных перестраиваемых широкополосных антенных систем.
При проведении летных испытаний нескольких беспилотных летательных аппаратов одновременно, особенно серийно выпускаемых, приоритетной задачей является не передача ТЛМ информации, а обеспечение безопасности проведения испытаний, а именно - контроль местоположения летательного аппарата в режиме реального времени с передачей при необходимости команд корректировки положения от аппаратуры дистанционного контроля и управления.
Наиболее близким по технической сущности и достигаемому результату к заявляемому малогабаритному приемо-передающему устройству для контроля полета беспилотного летательного аппарата является малогабаритное приемное устройство МГПУ-2 (см. Изделие МГПУ-2. Техническое описание, 1988 г.), которое является приемной частью командной радиолинии управления и предназначено для приема, расшифровки и выдачи команд управления на исполнительные механизмы беспилотных объектов.
Изделие МГПУ-2 представляет собой приемную часть узкополосной радиолинии управления и обеспечивает бесподстроечное вхождение в связь с наземной передающей станцией и прием команд управления на любой из 12 фиксированных частот в диапазоне 47,9-79,0 МГц.
Известное изделие МГПУ-2, принятое за прототип, состоит из фидера антенно-фидерного устройства, предназначенного для передачи высокочастотного сигнала от приемной антенны на вход приемника, приемника, осуществляющего усиление по высокой частоте, преобразование, усиление по промежуточной частоте и детектирование сигнала, дешифратора команд, производящего разделение по командам входной командной посылки и расшифровывания команды с последующей ее выдачей на контакты выходного разъема, а также стабилизатора и преобразователя напряжения с фильтром для формирования напряжений, необходимых для нормальной работы всех блоков изделия.
Однако изделие МГПУ-2 имеет большие габариты, а используемый диапазон частот приводит к необходимости применения громоздкой антенны или антенных систем, что, в совокупности, затрудняет применение изделия на беспилотных летательных аппаратах, особенно серийно выпускаемых.
Известно, что современные средства радиоэлектронной борьбы имеют возможность записи любых радиосигналов с дальнейшим их воспроизведением в радиолинию. При записи средствами радиоэлектронной борьбы передаваемых на изделие МГПУ-2 команд с их дальнейшим воспроизведением устройство МГПУ-2 произведет несанкционированный прием, расшифровку и выдачу команд управления на исполнительные механизмы беспилотных объектов.
Используемый в изделии МГПУ-2 принцип действия командной радиолинии ограничивает число возможных команд 24 командами, что не всегда достаточно и ограничивает применяемость изделия.
Также, в изделие МГПУ-2 отсутствует обратный радиоканал для передачи информации об исполнении переданных команд, что снижает надежность командной радиолинии и приводит к необходимости применения дополнительных телеметрических систем.
При проведении летных испытаний беспилотных летательных аппаратов ставятся задачи постоянного контроля нахождения беспилотного летательного аппарата в разрешенной зоне в режиме реального времени и, при необходимости, передачи на беспилотный летательный аппарат команд корректировки положения от аппаратуры дистанционного контроля и управления. Изделие МГПУ-2 обеспечивает передачу команд управления, но для контроля нахождения беспилотного летательного аппарата в разрешенной зоне необходимо применение дополнительной контрольной телеметрической аппаратуры, например вычисляющей навигационные координаты.
Техническая задача, на решение которой направлено заявляемое изобретение, заключается в расширении функциональных возможностей устройства при обеспечении надежности приема команд управления, а также уменьшении габаритов устройства.
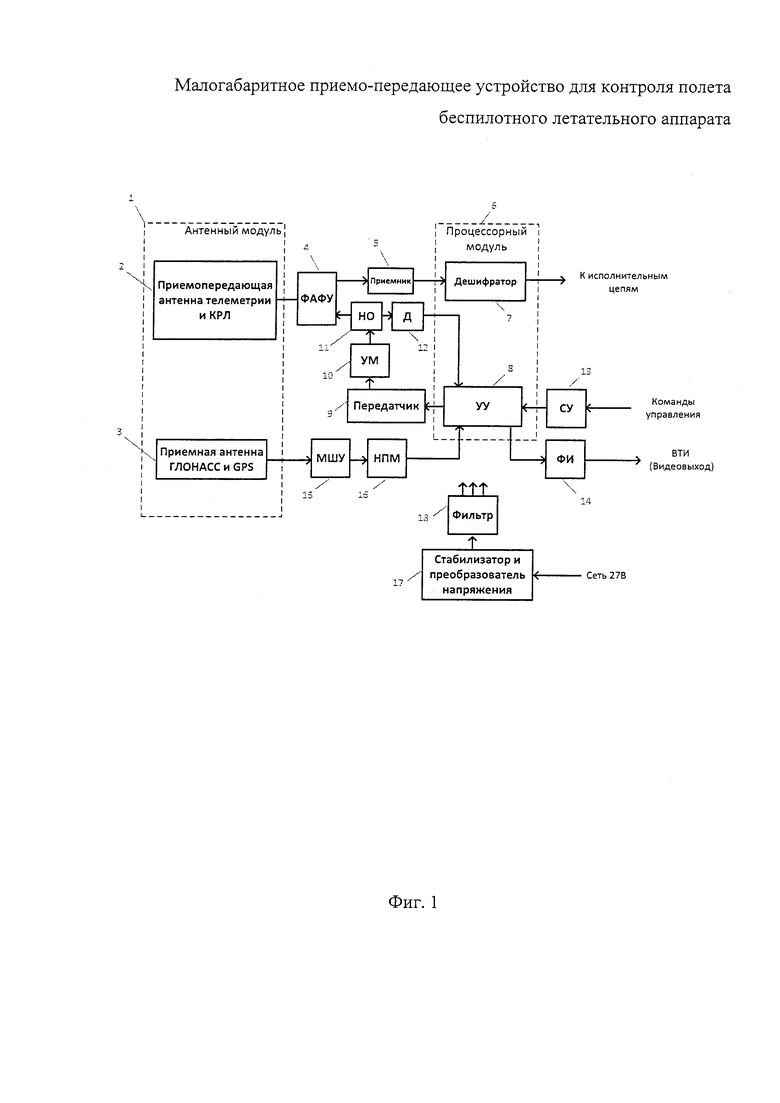
Указанный технический результат достигается тем, что в малогабаритное приемо-передающее устройство для контроля полета беспилотного летательного аппарата, функциональная схема которого приведена на фиг. 1, дополнительно к последовательно соединенным фидеру антенно-фидерного устройства (4) для передачи высокочастотного сигнала от приемной антенны на вход приемника, приемнику (5), осуществляющему усиление по высокой частоте, преобразование и детектирование сигнала, дешифратору (7), стабилизатору и преобразователю напряжения (17), выход которого соединен с фильтром (18), введены встроенный антенный модуль (1), состоящий из приемопередающей антенны телеметрии и командной радиолинии (2) и приемной антенны сигналов навигационных спутниковых систем ГЛОНАСС и GPS (3); устройство управления (8), входы которого соединены с согласующим устройством (13), последовательно соединенными детектором высокочастотных сигналов (12) и направленным ответвителем (11), последовательно соединенными навигационным приемным модулем (16) и малошумящим усилителем высокочастотных сигналов навигационных спутниковых систем (15), а выходы соединены с передатчиком квитанций приема и дешифрации команд и навигационных координат беспилотного летательного аппарата (9), выход которого соединен с усилителем мощности (10) и формирующим устройством (14); при этом в дешифратор команд введен специальный алгоритм преобразования принимаемых команд управления.
Поступающие с наземной аппаратуры на встроенный антенный модуль (1) радиосигналы управления принимаются антенной (2) и через фидер антенно-фидерного устройства (4) транслируются на приемник (5), где демодулируются. Демодулированный низкочастотный сигнал, содержащий принятую команду управления, подается на дешифратор команд (7), являющийся составной частью процессорного модуля (6).
Дешифратор команд (7) по специальному алгоритму преобразует полученные данные, проверяет достоверность информации, производит декодирование и, при положительном результате работы алгоритма, выдает декодированную команду на исполнительные цепи.
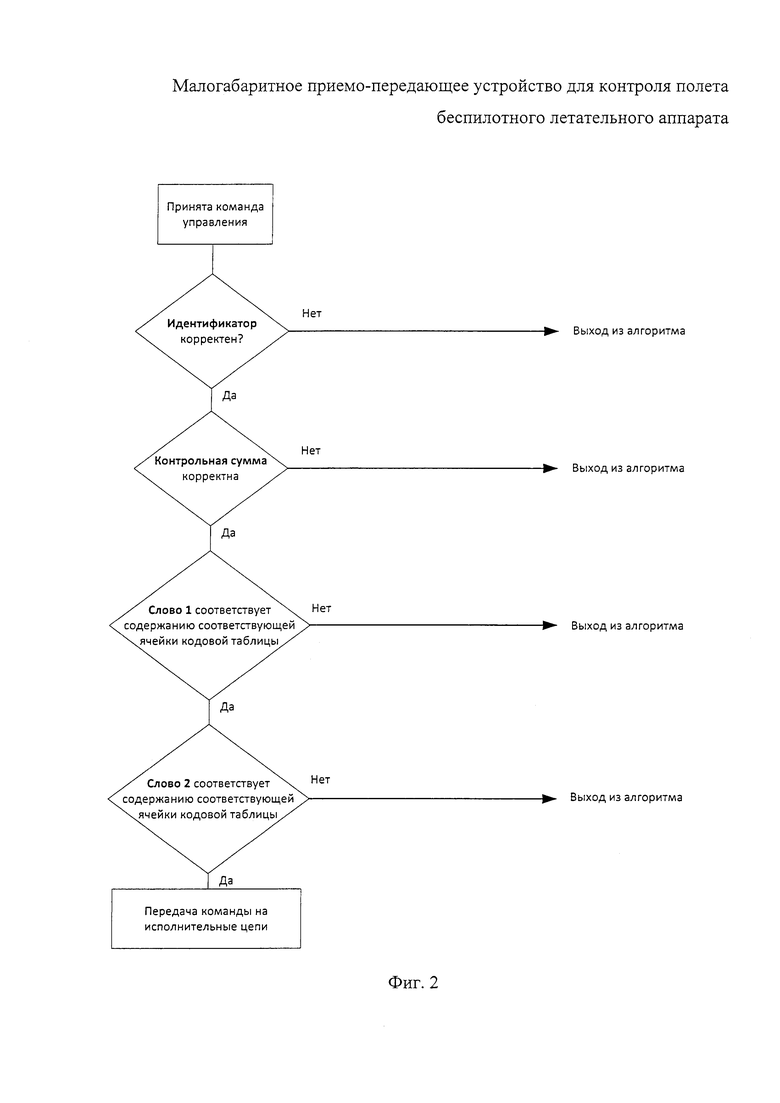
Алгоритм преобразования принимаемых команд управления приведен на фиг. 2.
Принимаемые команды управления состоят из последовательно переданных уникального идентификатора переданной команды (Идентификатор), произвольного числа (Случайный код), значения, хранящегося в ячейке персональной кодовой таблицы с адресом «Случайный код плюс индивидуальный номер устройства» (Слово 1), значения, хранящегося в ячейке персональной кодовой таблицы с адресом «Случайный код плюс удвоенный индивидуальный номер устройства» (Слово 2) и контрольной суммы. Таким образом, алгоритм учитывает индивидуальный номер конкретного малогабаритного приемо-передающего устройства для контроля полета беспилотного летательного аппарата, а также использует персональную кодовую таблицу, что обеспечивает уникальность каждой команды для каждого устройства и исключает несанкционированный прием и исполнение команд при их записи системами радиоэлектронной борьбы с дальнейшим воспроизведением в радиоканал. Также алгоритм не накладывает принципиальных ограничений на количество возможных команд, количество команд ограничено только разрядностью идентификатора.
Одновременно с выдачей принятой команды на исполнительные цепи устройство управления (8) формирует на входе передатчика (9) квитанцию приема команды. Передатчик производит модулирование низкочастотного сигнала и передает сформированный высокочастотный сигнал на усилитель мощности (10), где сигнал усиливается до требуемых значений и через направленный ответвитель (11), фидер антенно-фидерного устройства (4) и приемопередающую антенну (2) излучается в радиоканал. При этом ведется постоянный контроль мощности излучаемого сигнала. При прохождении через направленный ответвитель (11) дозированная часть мощности выходного сигнала подается на детектор (12), где детектируется. Полученное низкочастотное напряжение, пропорциональное мощности выходного излучаемого высокочастотного сигнала, измеряется устройством управления (8). Устройство управления производит автоматическое регулирование параметров усилителя мощности (10) таким образом, чтобы мощность выходного сигнала находилась в заданном диапазоне. Одновременно измеренная величина мощности выходного сигнала, аналогично квитанциям приема команд, телеметрируется в радиоканал. Таким образом, использование совокупности описанных технических решений обеспечивает гарантированное подтверждение по обратному радиоканалу факта принятия команды.
Кроме того, сигналы спутниковых навигационных систем ГЛОНАСС и GPS, принимаемые приемной антенной ГЛОНАСС и GPS (3) встроенного антенного модуля (1) поступают на малошумящий усилитель (15), где полезная составляющая сигналов фильтруется от помех и усиливается. Отфильтрованный и усиленный высокочастотный сигнал поступает на навигационный приемный модуль (16), где на основании принятых данных производится вычисление навигационных координат беспилотного летательного аппарата. Вычисленные координаты поступают на устройство управления (8), которое формирует данные о навигационных координатах для передачи по радиоканалу через передатчик (9), усилитель мощности (10), направленный ответвитель (11) и приемопередающую антенну телеметрии и КРЛ (2), а также для передачи на выходной соединитель и далее на другие системы беспилотного летательного аппарата через формирующее устройство (14), обеспечивающее гальваническую развязку и согласование уровней сигналов.
Решение технической задачи уменьшения габаритов для облегчения внедряемости устройства на беспилотные летательные аппараты, особенно серийно выпускаемые, достигается использованием частотного диапазона 433 МГц, что позволяет снизить геометрические размеры приемопередающей антенны телеметрии и КРЛ (2). Кроме того, совмещение приемопередающей антенны телеметрии и КРЛ (2) и приемной антенны ГЛОНАСС и GPS в один встроенный антенный модуль (1), позволяет конструктивно выполнить заявляемое изобретение в виде моноблока без необходимости использования внешних антенно-фидерных систем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Малогабаритная радиостанция передачи команд управления беспилотным летательным аппаратом | 2021 |
|
RU2767605C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА ТЕЛЕМЕТРИЧЕСКОЙ И КОМАНДНОЙ ИНФОРМАЦИИ В ОДНОМ ДИАПАЗОНЕ РАДИОЧАСТОТ МНОГОПОТОЧНОЙ РАДИОСИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2422994C1 |
| КОМАНДНО-ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2620591C1 |
| БОРТОВАЯ РАДИОАППАРАТУРА ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2442723C1 |
| УНИФИЦИРОВАННЫЙ ТЕРМИНАЛ ОБМЕНА И ДОВЕДЕНИЯ ИНФОРМАЦИИ | 2022 |
|
RU2793068C1 |
| СПОСОБ ПРИМЕНЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2457531C1 |
| СИСТЕМА СВЯЗИ НАЗЕМНОГО ПУНКТА УПРАВЛЕНИЯ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2024 |
|
RU2825035C1 |
| Малогабаритное бортовое радиоэлектронное устройство для управления пилотажно-навигационным комплексом беспилотного летательного аппарата | 2021 |
|
RU2799748C2 |
| МЕТЕОРОЛОГИЧЕСКАЯ СИСТЕМА | 2011 |
|
RU2480791C2 |
| Бортовой информационно-навигационный комплекс | 2017 |
|
RU2663680C1 |
Изобретение относится к измерительной технике и может найти применение для дистанционного контроля полета беспилотного летательного аппарата (БПЛА) в режиме реального времени и приема команд управления. Технический результат – расширение функциональных возможностей за счет обеспечения надежности приема команд управления и уменьшения габаритов устройства. Для этого в устройстве применяют встроенный антенный модуль, состоящий из приемопередающей антенны телеметрии (ТЛМ) и командной радиолинии (КРЛ) и приемную антенну ГЛОНАСС и GPS, объединенные в один антенный модуль, навигационный приемный модуль ГЛОНАСС и GPS, передатчик квитанций принятых команд и навигационных координат, а также используют специальный алгоритм преобразования принимаемых сигналов КРЛ. 1 з.п. ф-лы, 2 ил.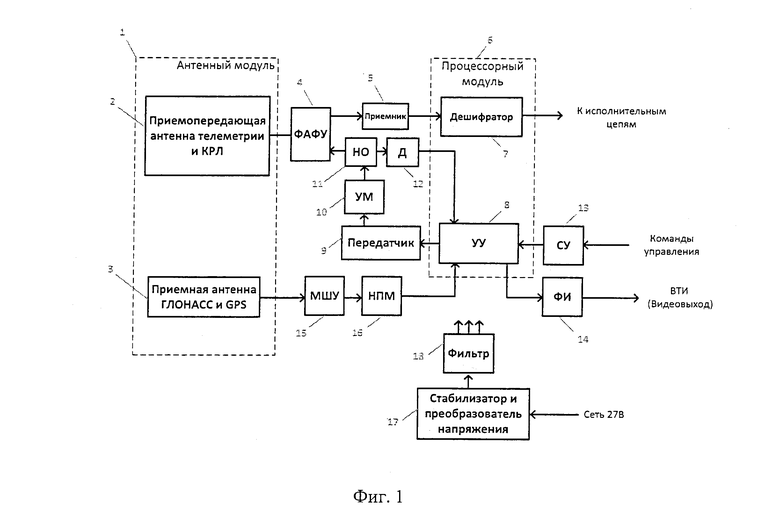
1. Малогабаритное приемо-передающее устройство для контроля полета беспилотного летательного аппарата, содержащее последовательно соединенные фидер антенно-фидерного устройства (4) для передачи высокочастотного сигнала от приемной антенны на вход приемника, приемник (5), осуществляющий усиление по высокой частоте, преобразование, усиление по промежуточной частоте и детектирование сигнала, дешифратор (7), стабилизатор и преобразователь напряжения (17), выход которого соединен с фильтром (18), отличающееся тем, что в него введены встроенный антенный модуль (1), состоящий из приемо-передающей антенны телеметрии и командной радиолинии (2) и приемной антенны сигналов навигационных спутниковых систем (3); устройство управления (8), входы которого соединены с согласующим устройством (13), последовательно соединенными детектором высокочастотных сигналов (12) и направленным ответвителем (11), последовательно соединенными навигационным приемным модулем (16) и малошумящим усилителем высокочастотных сигналов навигационных спутниковых систем (15), а выходы соединены с передатчиком квитанций приема и дешифрации команд и навигационных координат беспилотного летательного аппарата (9), выход которого соединен с усилителем мощности (10) и формирующим устройством (14), при этом в дешифратор команд введен специальный алгоритм преобразования принимаемых команд управления.
2. Устройство по п. 1, отличающееся тем, что в качестве спутниковых навигационных систем используют ГЛОНАСС и GPS.
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2506553C2 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА ТЕЛЕМЕТРИЧЕСКОЙ И КОМАНДНОЙ ИНФОРМАЦИИ В ОДНОМ ДИАПАЗОНЕ РАДИОЧАСТОТ МНОГОПОТОЧНОЙ РАДИОСИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2422994C1 |
| Способ охлаждения парафина, битумов твердых марок и тому подобных материалов | 1949 |
|
SU87308A1 |
| ИНФОРМАЦИОННАЯ СИСТЕМА МЕЖСАМОЛЕТНОЙ НАВИГАЦИИ | 1995 |
|
RU2089449C1 |
| Способ многоканальной регистрации результатов измерений и устройство для его осуществления | 1990 |
|
SU1747905A1 |

