Изобретение относится к области промышленной робототехники и может быть использовано при проектировании роботов с внешними магнитными системами, а также может использоваться для механизации и технологических операций.
Известен промышленный робот (Патент РФ №2205745, опубл. 10.06.2003, Литвиненко A.M. бюл. №16, заявка 2002104028/02 от 14.02.2002), содержащий основание, на основании установлен первый привод поворота, с ним последовательно соединены с помощью валов второй привод поворота, первый привод крена, второй привод крена, первый привод тангажа, второй привод тангажа и платформа, при этом на валу, размещенном между вторым приводом крена и первым приводом крена, установлена скользящая втулка, на валу между вторым приводом тангажа и первым приводом тангажа также установлена скользящая втулка, при этом между втулками размещена пружина, а валы с втулками расположены крестообразно.
Недостатком данного изобретения является большие массогабаритные показатели, а также низкие технологические возможности, обусловленные малой маневренностью кинематической цепи.
Наиболее близким по технической сущности являются промышленный робот (Патент РФ №2263571, Литвиненко A.M., опубл. 10.11.2005, бюл. №31, заявка 2004107075/02 от 09.03.2004), содержащий платформу, основание, на основании укреплен привод степеней подвижности. Между основанием и платформой установлены дугообразные пружинные элементы с концами, укрепленными на основании. При этом в верхней части эти элементы прикреплены к платформе, а боковые части элементов шарнирно соединены с приводами.
Недостатком прототипа являются низкие технологические возможности, обусловленные малой маневренностью кинематической цепи.
Изобретение направлено на повышение зоны обслуживания и уменьшение массы робота.
Это достигается тем, что промышленный робот, содержащий основание и платформу, связанные посредством электропривода, согласно изобретению электропривод выполнен в виде статора, содержащего верхнюю и нижнюю тарельчатые шайбы, расположенные с образованием кольцеобразного зазора между ними, и размещенный между ними магнитопровод с катушкой возбуждения, механических передач и роторов, размещенных в кольцеобразном зазоре между верхней и нижней тарельчатыми шайбами, при этом каждый ротор выполнен с валом, соединенным с механической передачей с возможностью преобразования вращательного движения вала в поступательное движение для перемещения платформы и требуемом направлении.
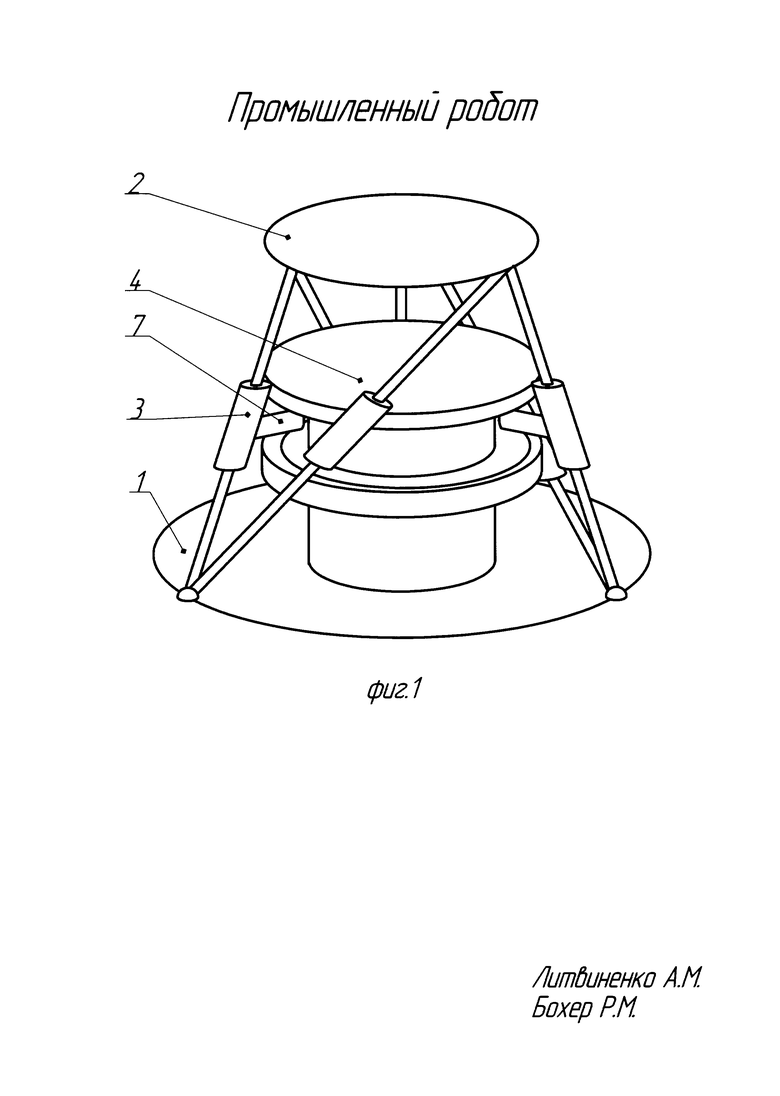
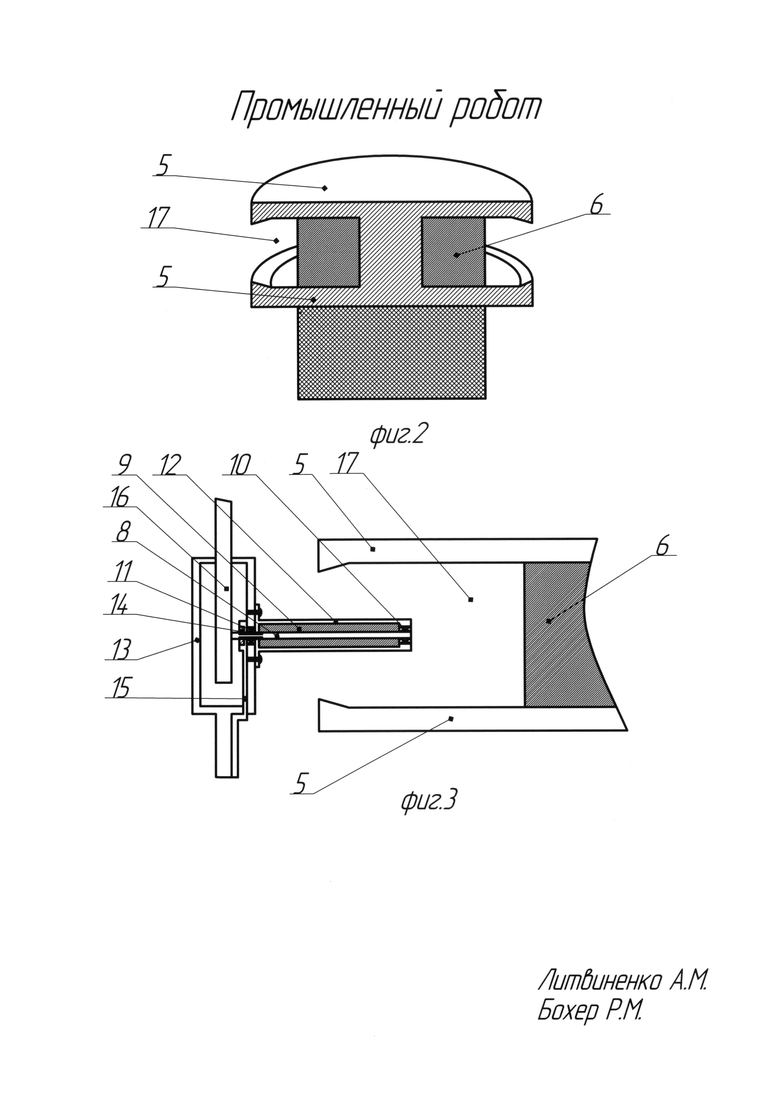
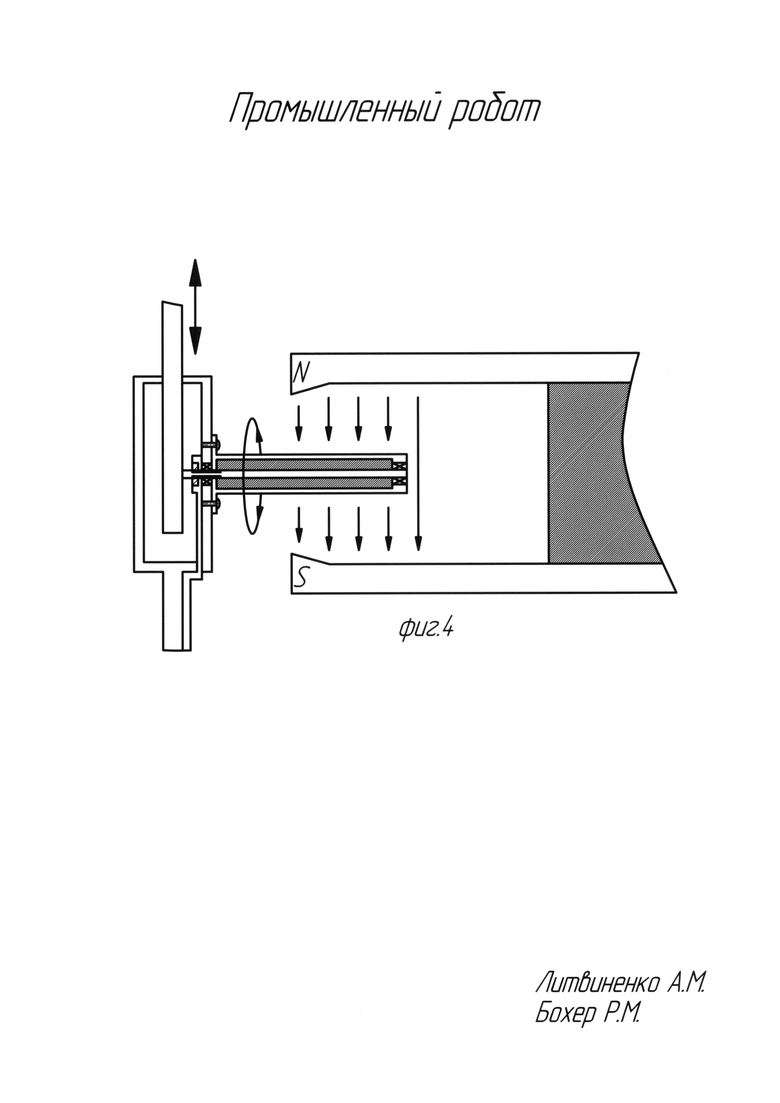
Изобретение иллюстрируется чертежом, где на фиг. 1 показан заявленный промышленный робот вид спереди. Статор в виде тарельчатых шайб в разрезе изображен фиг. 2. Электропривод промышленного робота показан на фиг. 3. На фиг. 4 представлена схема работы электропривода промышленного робота.
Промышленный робот содержит основание 1, платформу 2. Основание 1 и платформа 2 связанны с помощью шести электроприводов 3, а также на основании 1 установлен статор 4 электропривода 3. Статор 4 содержит верхнюю и нижнюю тарельчатые шайбы 5, обмотку возбуждения статора 6. Ротор 7 электропривода содержит вал 8, обмотки возбуждения 9, подшипники 10, 11, корпус ротора 12, который закреплен на корпусе электропривода 13. Обмотки возбуждения 9 соединены с питанием щетками 14, которые в свою очередь соединены с питанием посредством кабеля 15. Вал 8 взаимодействует с механической передачей 16. Роторы электропривода размещены в кольцеобразном зазоре 17 между верхней и нижней тарельчатыми шайбами 5.
Промышленный робот работает следующим образом. Для перемещения платформы в требуемом направлении необходимо подключить к источнику электрической энергии (не показан) обмотку 6 статора 4, который создаст магнитный поток в зазоре между тарельчатыми шайбами 5. При включении источника электрической энергии ток поступает через кабель 15 к щеткам 14 ротора 7. Через щетки 14 на обмотки возбуждения 9 подается электрический ток, вследствие чего возникает вращение вала 8 ротора 7. Вал 8 соединен с механической передачей 16, которая из вращательного движения создает поступательное, приводя всю конструкцию в движение.
Введение платформы, основания, приводов степеней подвижности, закрепленных между основанием и платформой, позволяет увеличить зону обслуживания, а магнитная система электроприводов, выполненная в виде верхней и нижней тарельчатых шайб, между которыми установлен магнитопровод с катушкой возбуждения, а роторы электропривода размещены в кольцеобразном зазоре между верхней и нижней тарельчатыми шайбами, уменьшает массогабаритные показатели робота.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТОРЦЕВОГО ТИПА | 2001 |
|
RU2190518C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ОРБИТАЛЬНАЯ СИСТЕМА ТОРЦЕВОГО ТИПА | 2001 |
|
RU2184029C1 |
| СИСТЕМА ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2182534C1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2001 |
|
RU2184030C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416861C1 |
| Генератор индукторный | 2015 |
|
RU2652383C2 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437200C1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2005 |
|
RU2300456C1 |
| ОРБИТАЛЬНЫЙ МОТОР-РЕДУКТОР | 2009 |
|
RU2428782C2 |
| Ротор сегментного ветроэлектрогенератора | 2021 |
|
RU2782635C1 |
Изобретение относится к области промышленной робототехники и может быть использовано при проектировании роботов с внешними магнитными системами и для механизации технологических операций. Робот содержит основание и платформу, связанные посредством электропривода. Электропривод выполнен в виде статора, содержащего верхнюю и нижнюю тарельчатые шайбы, расположенные с образованием кольцеобразного зазора между ними, и размещенный между ними магнитопровод с катушкой возбуждения, механических передач и роторов. Роторы размещены в кольцеобразном зазоре между верхней и нижней тарельчатыми шайбами. Каждый ротор выполнен с валом, соединенным с механической передачей с возможностью преобразования вращательного движения вала в поступательное движение для перемещения платформы в требуемом направлении. Изобретение направлено на повышение зоны обслуживания и уменьшение массы робота. 4 ил.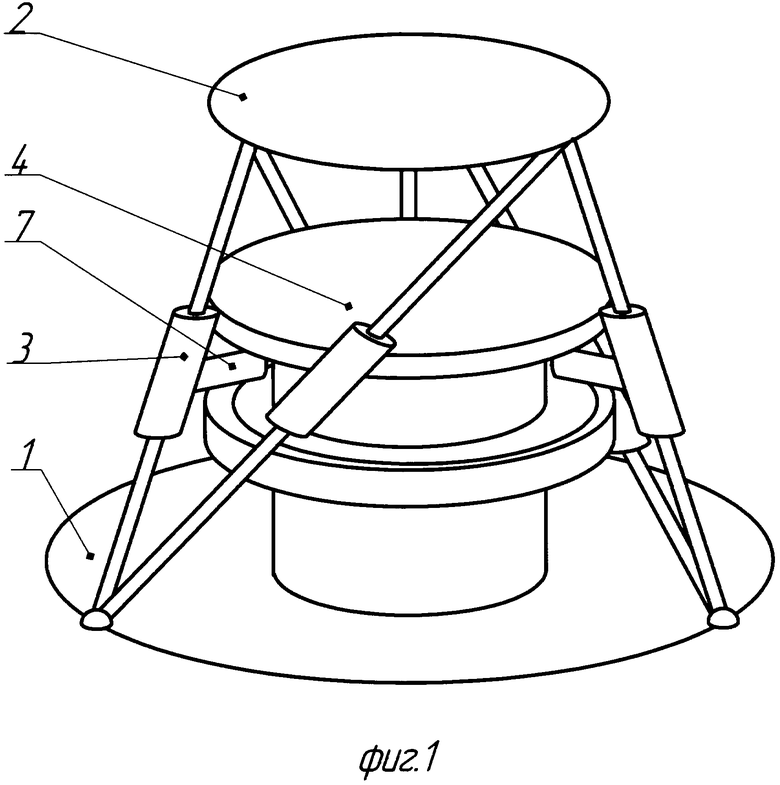
Промышленный робот, содержащий основание, платформу, связанные посредством электропривода, отличающийся тем, что электропривод выполнен в виде статора, содержащего верхнюю и нижнюю тарельчатые шайбы, расположенные с образованием кольцеобразного зазора между ними, и размещенный между ними магнитопровод с катушкой возбуждения, механических передач и роторов, размещенных в кольцеобразном зазоре между верхней и нижней тарельчатыми шайбами, при этом каждый ротор выполнен с валом, соединенным с механической передачей с возможностью преобразования вращательного движения вала в поступательное движение для перемещения платформы в требуемом направлении.
| ПРОМЫШЛЕННЫЙ РОБОТ | 2004 |
|
RU2263571C1 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2010 |
|
RU2443543C1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2000 |
|
RU2189899C2 |
| US 2013164107 A1, 27.06.2013. | |||

