Изобретение относится к машиностроению, а именно к робототехнике, в частности к манипуляторам промышленных роботов, использующихся в медицине в качестве автоматических артикуляторов - иммитаторов движений нижней челюсти, и может быть использовано в ортопедической стоматологии.
Известен манипулятор промышленного робота [1], содержащий шестистепенной механизм, установленный на основании, при этом на основании укреплен первый привод поворота, с ним последовательно соединены с помощью валов второй привод поворота, первый привод крена, второй привод крена, первый привод тангажа, второй привод тангажа и платформа. Также в состав робота входит и измеритель текущих параметров, при этом измеритель текущих параметров выполнен в виде комбинации однокомпонентного и трехкомпонентного акселерометра.
Наиболее близким к заявляемому по совокупности существенных признаков является промышленный робот [2], содержащий основание, на основании установлен первый привод поворота, с ним последовательно соединены с помощью валов второй привод поворота, первый привод крена, второй привод крена, первый привод тангажа, второй привод тангажа и платформа.
Недостатком данной платформы (промышленного робота) является малая жесткость кинематической цепи, обусловленная ее протяженностью.
Изобретение направлено на обеспечение жесткости при сохранении модульности и технологичности.
Это достигается тем, что промышленный робот содержит платформу, основание, на основании укреплены приводы степеней подвижности, при этом между основанием и платформой установлены дугообразные пружинные элементы с концами, укрепленными на основании, при этом в верхней части эти элементы прикреплены к платформе, а боковые части элементов шарнирно соединены с приводами.
Достижение технического результата обеспечивается за счет того, что между платформой и основанием включено несколько связей, что обеспечивает повышенную жесткость и практическое отсутствие зазора в кинематической цепи.
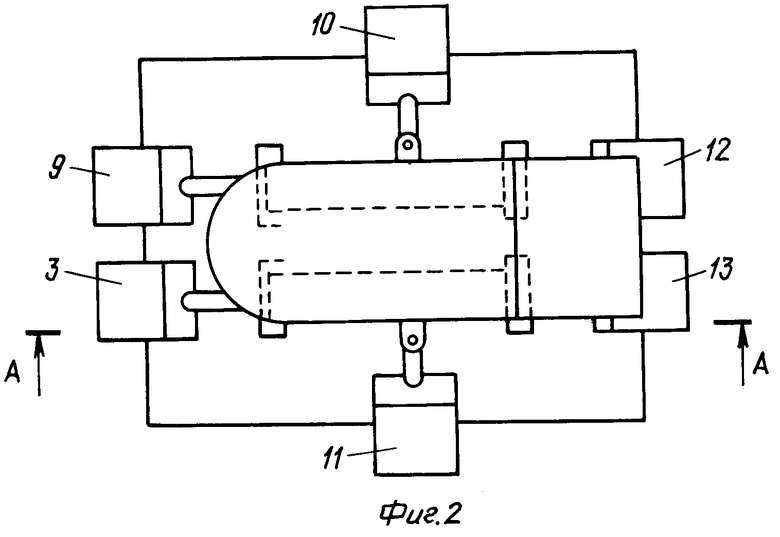
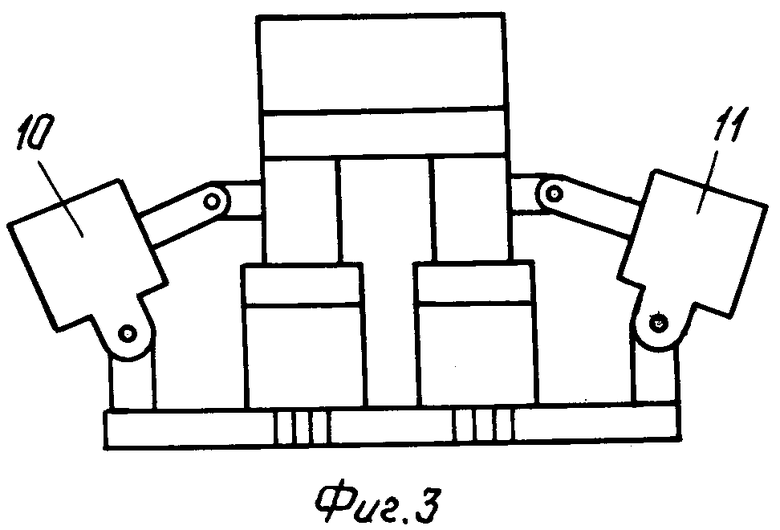
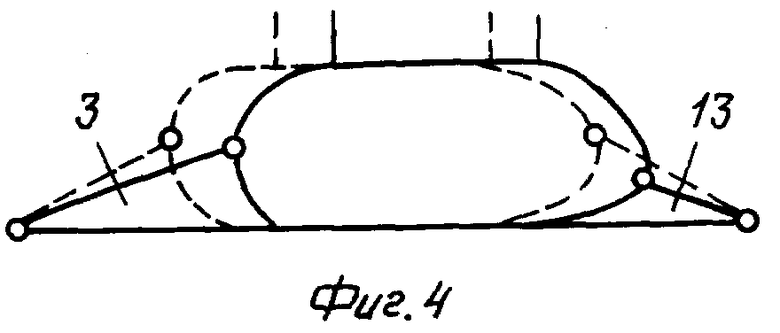
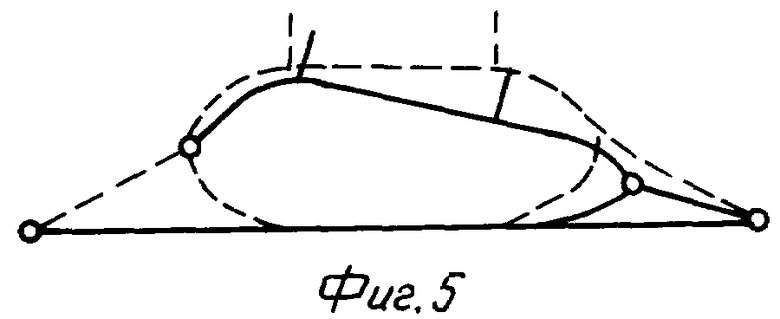
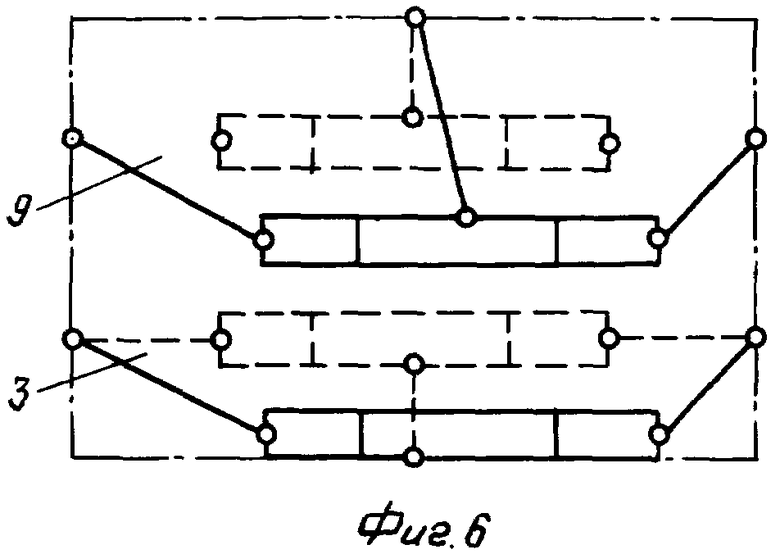
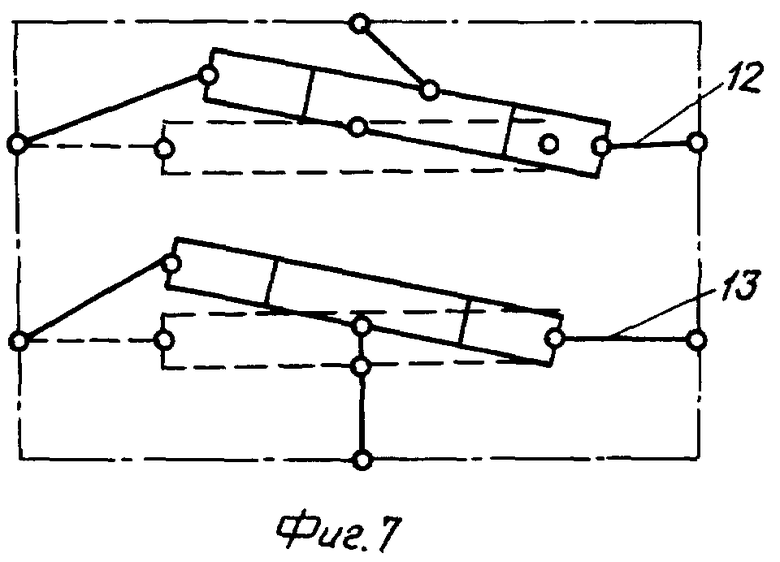
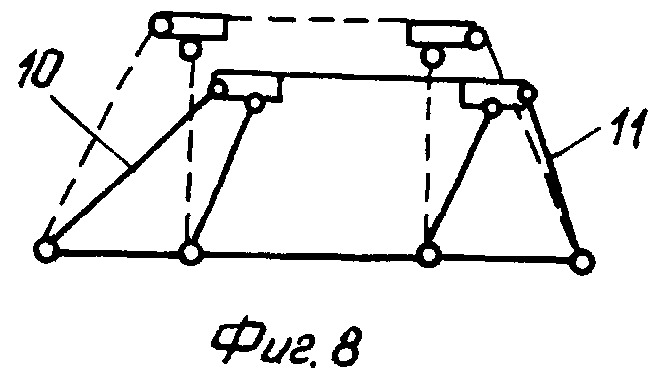
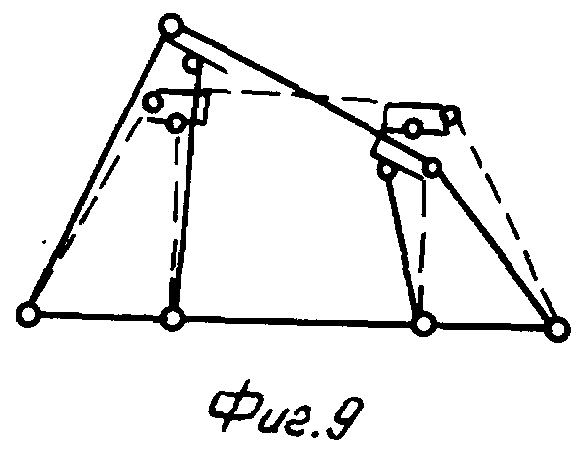
Сущность изобретения иллюстрируется чертежом, где на фиг.1 показано изображение промышленного робота, вид сбоку в сечении, на фиг.2 то же - вид сверху, на фиг.3 вид спереди, а на фиг.4 показано функционирование робота в режиме параллельного перемещения сбоку, на фиг.5 - режим крена в боковой плоскости, на фиг.6 - режим плоскопараллельного перемещения в горизонтальной плоскости, на фиг.7 - режим поворота в горизонтальной плоскости, на фиг.8 - режим плоскопараллельного перемещения во фронтальной плоскости, на фиг.9 - режим крена во фронтальной плоскости.
Промышленный робот состоит из основания 1, на основании с помощью шарниров 2 укреплены приводы 3, имеющие выходной шток 4, который с помощью шарниров 5, соединен с боковой частью 6 дугообразного пружинного элемента, при этом его верхняя часть 7 соединена с платформой 8. Всего имеется 6 приводов: приводы 3 и 9 - перемещение 2-х параллельных дугообразных пружинных элементов с фронтальной стороны платформы, приводы 10 и 11 крена - перемещения во фронтальной плоскости, приводы 12 и 13 - перемещения 2-х параллельных дугообразных пружинных элементов с задней стороны платформы.
Все приводы представляют собой двигатели постоянного тока через зубчатые редукторы, соединенные с шестерней, входящих в зацепление с рейкой, на которой укреплен шток 4. Промышленный робот функционирует следующим образом: плоскопараллельное перемещение в боковой вертикальной плоскости обеспечивается одновременной работой приводов 3, 9 и 12, 13, что схематично показано на фиг.4, при этом левые приводы работают на выдвижении, а правые на втягивание, а боковые части 6 перекатываются по нижней части платформы 8; если же работает лишь одна группа приводов, например 12 и 13 только на втягивание, то, как показано на фиг.5, будет осуществляться лишь крен в этой области; если в режиме, соответствующем фиг.4, привод 10 будет работать на выдвижение, а привод 11 - на втягивание, то будет осуществляться плоскопараллельное движение в горизонтальной плоскости - фиг.6; при работе противоположной параллельной пары, например: приводы 9 и 13 одновременно на выдвижение, то при фиксации штоков приводов 10 и 11 будет наблюдаться поворот в горизонтальной плоскости - фиг.7; при фиксации штоков приводов 3, 9, 12, 13 и при работе привода 10 на выдвижение, а привода 11 - на втягивание, будет осуществляться плоскопараллельное движение в вертикальной фронтальной плоскости - фиг.8; и наконец, при работе только одного привода 10 или 11 будет осуществляться крен в вертикальной фронтальной плоскости - см. фиг.9. Все приводы являются следящими системами, снабженными датчиками перемещения штока, которые управляются от стандартных систем управления.
Характерной особенностью промышленного робота является его модульная структура приводов, что повышает технологичность исполнения, а также жесткая конструкция, что в совокупности обеспечивает качественное функционирование устройства, повышает его надежность, улучшает функциональные характеристики, в частности, уменьшается погрешность воспроизведения движения.
Источники информации
1. А.с. СССР №1301685 - Промышленный робот /А.Ш.Колискор. - заявка №3889009/31 - 08 от 22.04.85, опубл. 07.04.87, бюл. №13, МКИ4 В 25 J 9/00.
2. Патенты РФ №2205745 - Промышленный робот /A.M.Литвиненко, А.В.Машаров - заявка №2002104028/02 от 14.02.2002, опубл. 10.06.2003, бюл. №16, МКИ7 В 25 J 11/00, 13/00.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОМЫШЛЕННЫЙ РОБОТ | 2002 |
|
RU2205745C1 |
| РОБОТ-АРТИКУЛЯТОР | 2008 |
|
RU2390405C2 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2005 |
|
RU2300456C1 |
| Промышленный робот | 2015 |
|
RU2656623C2 |
| БЕЗРЕЛЬСОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО АТТРАКЦИОНА ДЛЯ КАТАНИЯ DARK RIDE, СИСТЕМА И СПОСОБ | 2012 |
|
RU2591549C2 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ДЛЯ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2000 |
|
RU2191149C2 |
| РЕКОНФИГУРИРУЕМЫЙ МОДУЛЬНЫЙ РОБОТ И СПОСОБ ОРГАНИЗАЦИИ ДВИЖЕНИЙ И МЕЖМОДУЛЬНОГО ВЗАИМОДЕЙСТВИЯ РЕКОНФИГУРИРУЕМОГО МОДУЛЬНОГО РОБОТА | 2022 |
|
RU2801332C1 |
| Модуль промышленного робота | 1986 |
|
SU1335447A1 |
| Промышленный робот | 1990 |
|
SU1729740A1 |
| СИСТЕМА ПОДВИЖНОСТИ КАБИНЫ ПИЛОТАЖНОГО ТРЕНАЖЕРА ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2247432C2 |
Изобретение относится к робототехнике, в частности к манипуляторам промышленных роботов, использующихся в медицине в качестве автоматических артикуляторов - иммитаторов движений нижней челюсти, и может быть использовано в ортопедической промышленности. Робот содержит платформу, основание, на основании укреплены приводы степеней подвижности. Между основанием и платформой установлены дугообразные пружинные элементы с концами, укрепленными на основании. При этом в верхней части эти элементы прикреплены к платформе, а боковые части элементов шарнирно соединены с приводами. Изобретение позволит обеспечить жесткость при сохранении модульности и технологичности. 9 ил.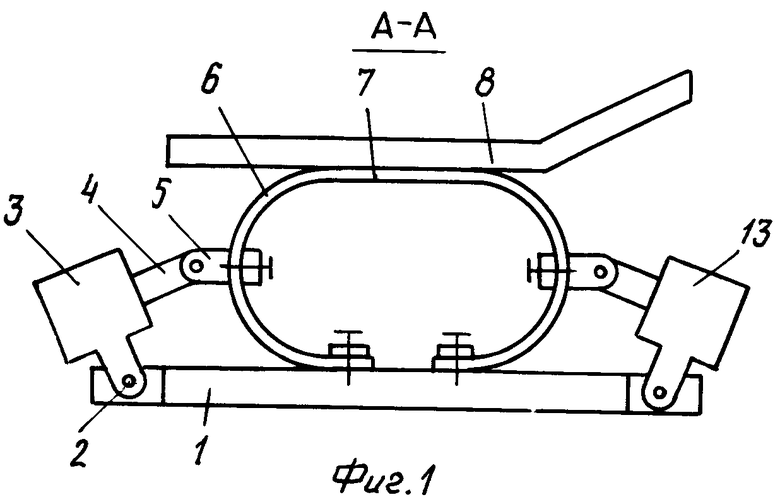
Промышленный робот, содержащий платформу, основание, на основании укреплены приводы степеней подвижности, отличающийся тем, что между основанием и платформой установлены дугообразные пружинные элементы с концами, укрепленными на основании, при этом в верхней части эти элементы прикреплены к платформе, а боковые части элементов шарнирно соединены с приводами.
| ПРОМЫШЛЕННЫЙ РОБОТ | 2002 |
|
RU2205745C1 |
| Промышленный робот | 1985 |
|
SU1301685A1 |
| Имитатор движения нижней челюсти | 1986 |
|
SU1364330A1 |
| Гидропривод бурильной машины | 1980 |
|
SU910997A1 |

