Изобретение относится к орбитальным электромеханическим системам (ОЭС), т. е. многофункциональным, многороторным, многокоординатным электромеханическим преобразователям, имеющим общую магнитную систему (преимущественно цилиндрического типа) и ряд роторов, оси которых разнесены по образующим замкнутой цилиндрической поверхности (орбите), при этом роторы имеют возможность совершать как минимум два движения: вращение вокруг собственной оси и орбитальное перемещение по круговой траектории относительно общего центра.
Данные орбитальные электромеханические системы применяются для электроприводов промышленных роботов, поскольку позволяют уменьшить массу и габариты подвижной части (платформы) манипулятора.
Известна орбитальная электромеханическая система промышленных роботов, имеющая торцевой цилиндрический индуктор (статор), внутри статора расположены диски роторов приводных двигателей [1]. Недостатком такой системы является увеличенный размер воздушного зазора. Это обусловлено наличием кривизны у цилиндрического статора, которая естественно не совпадает с плоскостью роторов. Кроме этого, недостатком является наличие только одного статора, что приводит к необходимости установки замыкающих магнитопроводов на вращающейся платформе.
Наиболее близким к заявляемой по совокупности существенных признаков является орбитальная электромеханическая система промышленного робота, которая содержит две магнитные системы - внутреннюю и внешнюю, каждая из которых представляет собой С-образный магнитопровод [2].
Недостатком данной системы является ее приспособленность лишь к электроприводам постоянного тока, к тому же только двухполюсного исполнения (по числу индукторов). В приводах торцевого типа С-ообразные магнитопроводы не применяются, поскольку замыкание магнитного потока осуществляется в пределах окружности торцевого статора, а ферромагнитные массы имеются на роторе. Применение же нескольких кольцеобразных статоров приводит к тому, что лобовые части их занимают полезное пространство зоны возбуждения роторов, что приводит к уменьшению вращающегося момента.
Изобретение направлено на увеличение вращающегося момента при одновременном применении нескольких кольцеобразных статоров, а также на уменьшение габаритов устройства.
Это достигается тем, что система орбитальная электромеханическая торцевого типа промышленного робота содержит торцевые статоры и роторы, установленные на вращаемом основании, при этом роторы установлены на основании двумя рядами, причем плоскости орбит роторов расположены параллельно, а оси одного ряда роторов помещены в межроторное пространство другого ряда роторов.
Достижение технического результата - повышение эффективности, увеличение момента вращения - достигается за счет увеличения числа активных зон. Так, у асинхронных двигателей традиционного исполнения имеется лишь одна активная зона. В данном же случае появляется вторая активная зона на втором ряде дисков.
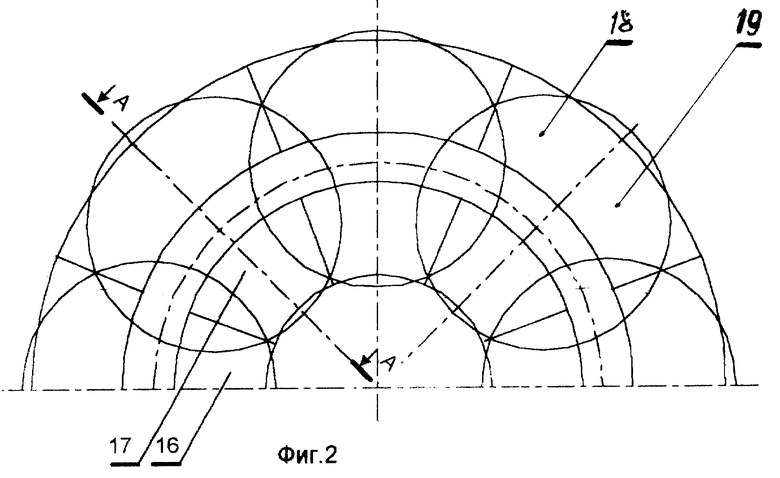
Сущность изобретения иллюстрируется чертежом, где на фиг.1 изображен разрез в вертикально-диаметральной плоскости системы орбитальной электромеханической торцевого типа, на фиг.2 показан разрез в горизонтальной плоскости, проходящей между верхним и нижним рядами дисков, при этом верхний ряд дисков, а точнее зона их расположения показана условно.
Система орбитальная электромеханическая имеет центральный опорный элемент 1, нижний статор 2, диски; верхний диск 3 (на фиг.1 показан один диск, в действительности же имеется целый ряд подобных роторов, например, четыре, что и показано на фиг. 2). Также имеется аналогичный ряд нижних дисков (роторов) 4. С нижним рядом роторов, помимо статора 2, взаимодействует статор 5, который, как и статор 2, установлен на общем основании 6. Имеется внешний опорный элемент 7, на котором укреплен верхний статор 8. Сечение по статорам 8, 11 и диску 3 на фиг.1 условно показано повернутым на 45o. Вал 9 нижнего диска 4 соединен с редуктором 10 привода степени подвижности промышленного робота, редуктор 12 соединен с валом 13 верхнего ротора 3. На опорном элементе 1 установлен центральный поворотный узел 14 вращающегося основания (платформы) 15 промышленного робота. Все статоры секционированы в магнитном отношении в направлении орбит верхнего и нижнего рядов роторов. Так, например, как показано на фиг.2, статор 2 имеет секции 16 и 17, остальные секции не пронумерованы. Статор 5 имеет аналогичные секции 18 и 19, секции статоров 8 и 11, как и сами статоры, не показаны, чтобы не загромождать чертеж.
Устройство работает следующим образом. Совокупность секций статоров 2 и 5 образует зоны взаимодействия с дисками 4, совокупность секций статоров 8 и 11 образует зоны взаимодействия с верхними дисками 3. При этом надо заметить, что зона короткозамкнутой обмотки расположена у дисков 4 снизу, а у дисков 3 сверху. Рассмотрим возможные режимы работы системы.
1. Собственное вращение роторов при остановленной платформе 15. При заторможенном основании вращение роторов нижнего ряда обеспечивается секциями статоров 2 и 5, а роторов верхнего ряда секциями статоров 8 и 11. Выбор секций осуществляется системой управления, в состав которой входит штатный датчик поворота платформы. Эти же секции осуществляют реверс роторов.
2. Вращение совокупности заторможенных роторов вместе с платформой относительно поворотного узла 14 - работа виртуального привода поворота платформы. В данном случае совокупность заторможенных дисков используется в качестве "составного" ротора, непосредственно осуществляющего безредукторный привод поворота 15. В этом случае задействуются все секции статоров 2, 5, 8, 11, т.е. их магнитное секционирование не используется.
И в том, и в другом случае момент вращения будет формироваться в четырех подзонах всех четырех статоров, которые объединены в две активные зоны: верхнюю и нижнюю. При этом валы роторов нижней зоны помещены в межроторное пространство верхнего ряда роторов, а активные зоны роторов при работе с заторможенной платформой, как видно на фиг.2, частично перекрывают друг друга.
Введение описанной конфигурации верхнего и нижнего ряда активных зон уменьшает за счет частичного перекрытия габариты устройства и увеличивают момент в режиме поворота платформы в два раза.
Источники информации
1. А. с. СССР 1459921 ( А.М. Литвиненко. Промышленный робот, опубл. БИ 7, 1989, В 25 J 11/00, з-ка 4224478/31-08 от 08.04.87).
2. А. с. СССР 1465305 ( А.М. Литвиненко. Промышленный робот, опубл. 15.03.89, БИ 10, 1989, В 25 J 11/00, з-ка 4198381/31-08 от 24.02.87).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2182534C1 |
| ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2184028C1 |
| ОРБИТАЛЬНЫЙ ШАГОВЫЙ МОТОР-РЕДУКТОР | 2001 |
|
RU2215358C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ОРБИТАЛЬНАЯ СИСТЕМА ТОРЦЕВОГО ТИПА | 2001 |
|
RU2184029C1 |
| ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА | 2001 |
|
RU2206954C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ЧЕРВЯЧНЫЙ ПРИВОД | 2001 |
|
RU2204068C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ВИНТОВОЙ ПРИВОД | 2001 |
|
RU2190791C1 |
| ОРБИТАЛЬНЫЙ МОТОР-РЕДУКТОР | 2001 |
|
RU2217856C2 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2001 |
|
RU2184030C1 |
| ВОЛНОВОЙ ОРБИТАЛЬНЫЙ ПРИВОД | 2001 |
|
RU2213894C2 |
Изобретение относится к орбитальным электроприводам промышленных роботов, работающим преимущественно в ангулярных системах координат. Система содержит торцевые статоры и роторы, установленные на вращаемом основании. Роторы установлены на основании двумя рядами. Плоскости орбит роторов расположены параллельно. Оси одного ряда роторов помещены в межроторное пространство другого ряда роторов. Изобретение позволит увеличить момент вращения, введение второй параллельной активной зоны дает возможность уменьшить массу и габариты системы за счет более плотной компоновки. 2 ил.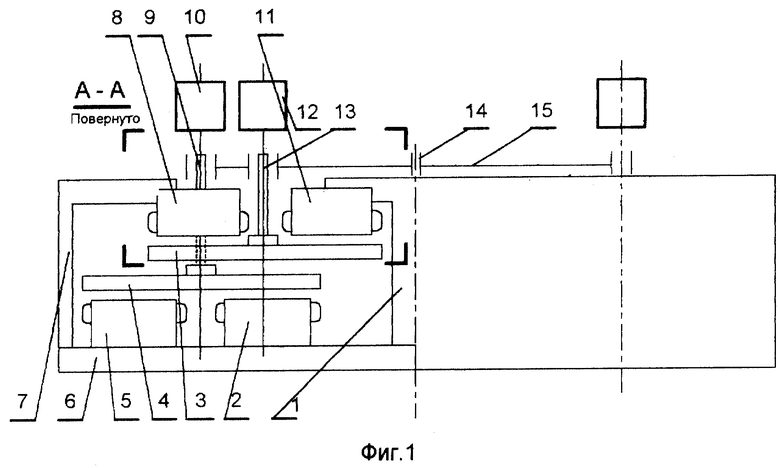
Система орбитальная электромеханическая торцевого типа промышленного робота, содержащая торцевые статоры и роторы, установленные на вращаемом основании, отличающаяся тем, что роторы установлены на основании двумя рядами, причем плоскости орбит роторов расположены параллельно, а оси одного ряда роторов помещены в межроторное пространство другого ряда роторов.
| Промышленный робот | 1987 |
|
SU1465305A1 |
| Промышленный робот | 1987 |
|
SU1459921A1 |
| ОРБИТАЛЬНЫЙ МОТОР-РЕДУКТОР | 1994 |
|
RU2071631C1 |
| US 4067998, 26.08.1986. | |||
