Изобретение относится к машиностроению, а именно к робототехнике, в частности к манипуляторам промышленных роботов, использующихся в медицине в качестве автоматических артикуляторов - имитаторов движения нижней челюсти человека, и может быть использовано в ортопедической стоматологии.
Известен манипулятор промышленного робота [1], содержащий шестистепенной механизм, установленный на основании, при этом на основании укреплен первый привод поворота, с ним последовательно соединены с помощью валов второй привод поворота, первый привод крена, второй привод крена, первый привод подъема, второй привод подъема и платформа.
Наиболее близким к заявляемому по совокупности существенных признаков является промышленный робот [2], содержащий основание, на основании установлен первый привод поворота, с ним последовательно соединены с помощью валов второй привод поворота, первый привод крена, второй привод крена, первый привод подъема, второй привод подъема и платформа.
Недостатком данного промышленного робота, манипулирующим с платформой (имитатором движений нижней челюсти), является низкое быстродействие, обусловленное большим значением присоединенных масс, особенно магнитных систем двигателей.
Изобретение направлено на уменьшение присоединенных масс и, как следствие, увеличение быстродействия.
Это достигается тем, что промышленный робот, содержащий платформу, вращающееся основание с приводами подъема и поворота и внешнюю магнитную систему, согласно изобретению дополнительно снабжен двухкоординатным столом с приводами его продольного и поперечного перемещения, вращающейся крестовиной и двумя вилками, первая из которых с приводом вращения крестовины размещена на столе, а вторая - на платформе, при этом привод поворота второй вилки установлен на крестовине, а в приводах поворота соответствующие двигатели связаны с гибкими валами.
Достижение технического результата обеспечивается за счет компоновки механической цепи, обеспечивающей перемещение якорей приводных двигателей в общем канале внешней магнитной системы и уменьшение тем самым влияния массы магнитной системы на динамические характеристики робота.
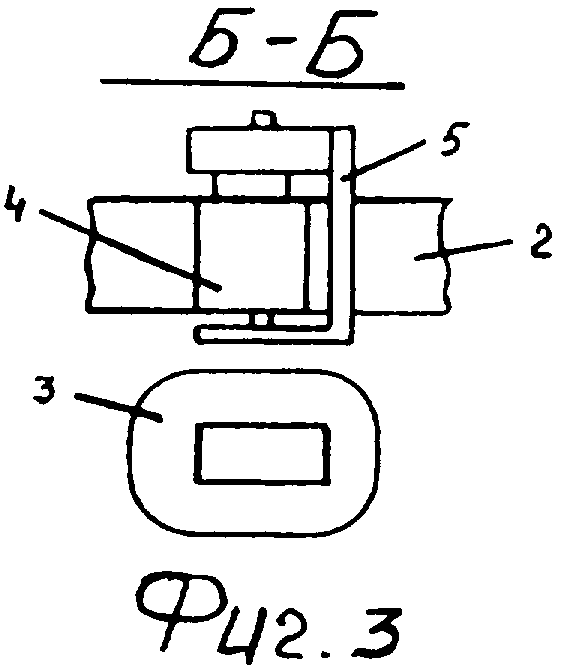
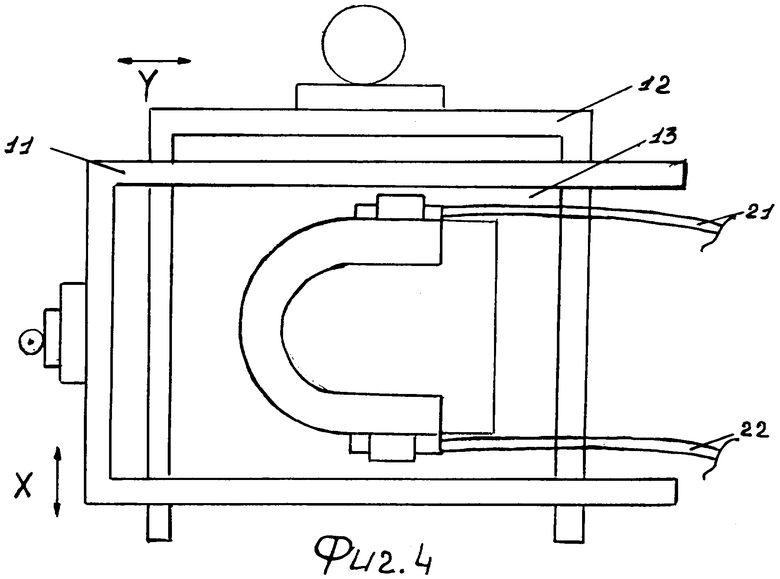
Сущность изобретения иллюстрируется чертежами, где на фиг.1 - кинематическая схема приводов предлагаемого робота; на фиг.2 - сечение А на уровне между коллекторами и полюсами; на фиг.3 - сечение Б в осевой плоскости одного из двигателей; на фиг.4 - вид сверху промышленного робота.
Промышленный робот состоит из основания 1, на котором закреплен общий для всех электродвигателей статор с полюсами 2 и обмотками 3. Между полюсами 2 расположены роторы 4 электродвигателей, установленные с помощью скоб 5 на основной платформе 6. В верхней части роторов 4 расположены щеточно-коллекторные узлы 7 и редукторы 8 приводов горизонтального перемещения, которые через шестерню 9 взаимодействуют с рейкой 10, которая соединена с вилкой 11. Вилка 12 имеет аналогичный привод, который заставляет ее перемещаться в направлении перпендикулярно направлению перемещения вилки 11. В перекрестии вилок установлен стол 13, представляющий собой легкосплавную плиту, перемещающуюся по вспомогательному основанию 14, на котором установлена первая вилка 11 с червячным редуктором 15. Редуктор 15 вращает крестовину 16, на которой установлен редуктор 17 поворота второй вилки 12, с которой скреплена платформа 18 с макетом челюсти. Вал 19 редуктора 17 и вал 20 редуктора 15 соединены с соответствующими приводами гибкими валами 21 и 22. Робот снабжен приводом подъема 23 и приводом поворота 24 обычного типа.
Промышленный робот функционирует следующим образом. Привод 24 осуществляет поворот платформы 6 в горизонтальной плоскости. Привод 23 - вертикальный подъем и опускание платформы 6. Первый привод горизонтального перемещения через редуктор 8 осуществляет перемещение стола 13 по координате Х фигуры 4 с помощью вилки 11. Второй привод горизонтального перемещения осуществляет аналогичное перемещение по координате Y.
Поворот в вертикальной плоскости (крен) осуществляется соответствующим двигателем с помощью гибкого вала 22 и редуктора 15, поворот в вертикальной ортогональной плоскости (тангаж) осуществляется редуктором 17 с помощью вала 21 и соответствующего двигателя.
Характерной особенностью промышленного робота является его модульная структура приводов, что повышает технологичность исполнения, жесткая конструкция, что в совокупности обеспечивает качественное функционирование устройства, повышает его надежность, улучшает функциональные характеристики, в частности уменьшает погрешность воспроизведения движения, а также его повышенное быстродействие, вызванное тем, что магнитные системы приводов горизонтального перемещения, а также тангажа и крена, установлены на неподвижном основании и их масса не влияет на быстродействие робота по этим координатам.
Источники информации
1. А.с. СССР №1301685 - Промышленный робот /А.Ш.Колискор. - заявка №3889009/31-08 от 22.04.85, опубл. 07.04.87, бюл. №13, МКИ В25J 9/00.
2. Патент РФ №2205745 - Промышленный робот / А.М.Литвиненко, A.B.Машаров - заявка №2002104028/02 от 14.02.02, опубл. 10.06.2003, бюл. №16, МКИ В25J 11/00, 13/00.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТ-АРТИКУЛЯТОР | 2008 |
|
RU2390405C2 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2002 |
|
RU2205745C1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2004 |
|
RU2263571C1 |
| Промышленный робот | 1990 |
|
SU1722810A1 |
| Промышленный робот | 2015 |
|
RU2656623C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЯЕМОГО ПЕРЕДВИЖЕНИЯ СМАРТФОНА ПО ГОРИЗОНТАЛЬНОЙ ПОВЕРХНОСТИ | 2015 |
|
RU2627555C2 |
| Подъемно-поворотный стол | 1980 |
|
SU884776A1 |
| Промышленный робот | 1987 |
|
SU1426781A1 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Промышленный робот | 1986 |
|
SU1342723A1 |

Изобретение относится к области машиностроения, а именно к робототехнике. Промышленный робот содержит основание, платформу с макетом челюсти, привода, которые перемещают эту платформу, и магнитную систему. Промышленный робот снабжен столом, крестовиной и вилками. Техническим результатом является обеспечение качественного функционирования устройства, повышение его надежности, а также повышение его быстродействия. 4 ил.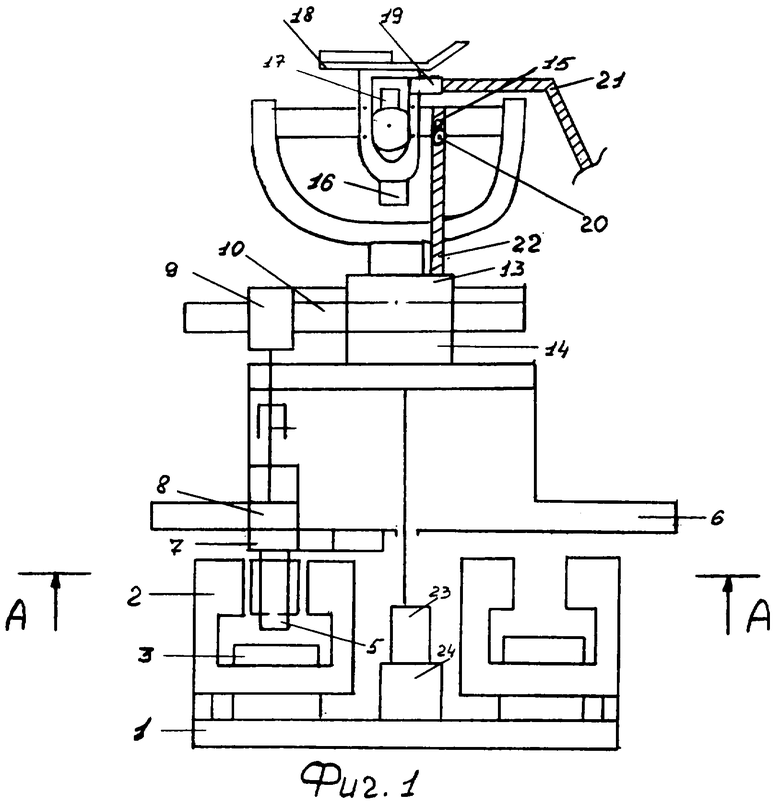
Промышленный робот, содержащий основание, платформу с макетом челюсти, снабженную приводами ее перемещения в пространстве, включающими редукторы, и внешнюю магнитную систему, отличающийся тем, что он снабжен двухкоординатным столом с приводами его продольного и поперечного перемещения, вращающейся крестовиной и двумя вилками, первая из которых с приводом вращения крестовины размещена на столе, а вторая на платформе, при этом привод поворота второй вилки установлен на крестовине, а в приводах поворота соответствующие двигатели связаны с гибкими валами.
| ПРОМЫШЛЕННЫЙ РОБОТ | 2002 |
|
RU2205745C1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2001 |
|
RU2184030C1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2003 |
|
RU2248270C1 |
| Гидропривод бурильной машины | 1980 |
|
SU910997A1 |

