Изобретение относится к орбитальным электромеханическим системам, т.е. многороторным, многоэлементным. многофункциональным электромеханическим преобразователям. оси роторов которых разнесены по цилиндрической поверхности, при этом диаметр роторов меньше диаметра расточки основного статора. Данные орбитальные электромеханические системы применяются для электроприводов промышленных роботов. поскольку позволяют уменьшить массу и габариты подвижной части (поворотной платформы) манипулятора.
Известны орбитальные электромеханические системы промышленных роботов, имеющие модульный торцевой цилиндрический индуктор (статор), внутри статора расположены диски роторов приводных двигателей [1]. Недостатком такой системы является увеличенный размер воздушного зазора. Это обусловлено наличием кривизны у цилиндрическою статора. которая, естественно, не совпадает с плоскостью роторов. Кроме этого, недостатком является наличие только одного статора, что приводит к необходимости установки замыкающих магнитопроводов на вращающейся платформе.
Из всех известных аналогов наиболее близким к заявляемому по совокупности существенных признаков является орбитальная электромеханическая система промышленного робота, которая содержит две магнитные системы - внутреннюю и внешнюю, каждая из которых представляет собой C-образный магнитопровод [2].
Недостатком данной системы является ее приспособленность лишь к электроприводам постоянного тока, к тому же только двухполюсного исполнения (по числу индукторов). В приводах торцевого типа С-образные магнитопроводы не применяются, поскольку замыкание магнитного потока осуществляется в пределах окружности торцевого статора, а ферромагнитные массы имеются на роторе. Применение же нескольких кольцеобразных статоров приводит к тому, что лобовые части их занимают полезное пространство зоны возбуждения роторов, что приводит к уменьшению вращающегося момента.
Изобретение направлено на повышение эффективности устройства, увеличение вращающегося момента, при одновременном применении нескольких кольцеобразных статоров.
Это достигается тем, что электромеханическая орбитальная система торцевого типа промышленного робота, содержащая статоры и роторы, установленные на вращаемом основании с обеспечением магнитной связи и воздушною зазора со статорами, отличается тем, что статоры выполнены в виде двух типов по длине с короткими и длинными концентрическими магнитопроводами, имеющими обмотки с лобовыми частями, при этом лобовые части обмоток коротких магнитопроводов вынесены в зону, примыкающую к воздушному зазору, а лобовые части обмоток длинных магнитопроводов расположены в пространстве под лобовыми частями обмоток коротких магнитопроводов.
Достижение технического результата - повышение эффективности, увеличение момента вращения - достигается за счет минимизации главных радиальных зазоров между концентрическими магнитопроводами. При этом имеется возможность выполнить верхнюю часть зубцов магнитопроводов в виде Т-образной формы (в плане диаметрального разреза в вертикальной плоскости). Даже выполнение верхней части зубцов магнитопроводов в виде прямоугольной формы позволяет уменьшить радиальные промежутки в два раза, если бы обмотки располагались в одной плоскости, за счет того что лобовые части любой средней (т.e. находящихся между внешней и внутренней) обмотки находятся в промежутке под или над лобовыми частями соседних обмоток.
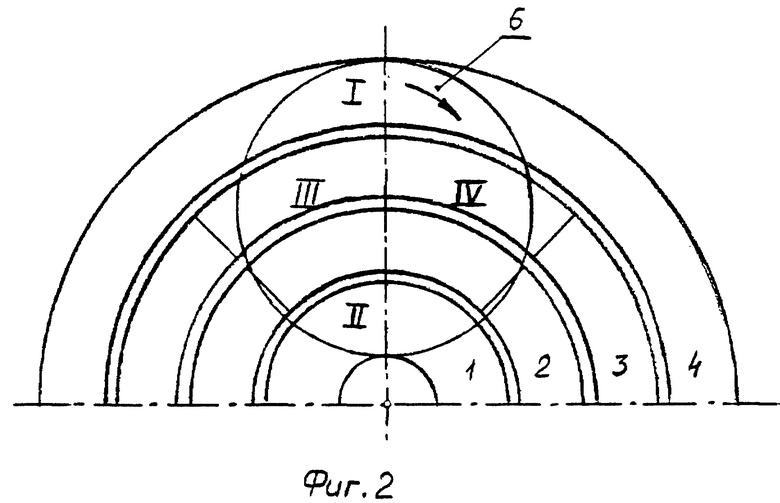
Сущность изобретения иллюстрируется чертежами, где на фиг.1 изображен разрез в вертикально-диаметральной плоскости электромеханической орбитальной системы торцевого типа, на фиг.2 показано расположение диска ротора относительно плоских концентричных магнитных систем, вид сверху по разрезу в плоскости воздушного зазора.
Электромеханическая орбитальная система торцевого типа содержит внутреннюю магнитную систему 1 с длинным магнитопроводом, вторую магнитную систему 2 с коротким магнитопроводом, расположенную концентрично магнитной системе 1, третью магнитную систему 3 с длинным магнитопроводом, четвертую магнитную систему 4 с коротким магнитопроводом, при этом магнитные системы 3 и 4 также расположены концентрично. Все магнитные системы, например, с коротким магнитопроводом имеют обмотки статора с лобовыми частями 5. Над обмотками и магнитопроводами на высоте воздушного зазора располагаются дисковые роторы 6 торцевых асинхронных двигателей, которые через редуктор 7 вращают звенья кинематической цепи манипулятора промышленного робота. Роторы установлены в подшипниках 8. Подшипники с роторами и приводами закреплены на вращающемся основании 9 промышленного робота, которая в свою очередь вращается в подшипнике, установленном на центральной опоре 10. Опора 10 установлена на общем основании 11, на котором установлены все магнитные системы с обмотками, в частности, обмотки магнитных систем с длинными магнитопроводами и лобовыми частями 12. Статоры с длинными магнитопроводами установлены непосредственно своими спинками 13 на основании 11. Магнитные системы с короткими магнитопроводами 2 и 4 устанавливаются на специальных подставках 14 и 15. При этом, как видно из фиг.1, лобовые части длинных и коротких магнитопроводов, например, 5 и 12 расположены соответственно в верхнем и нижнем ярусах с наложением при виде сверху. Статоры 1 и 4 выполняются традиционного типа, т.е. с цельным магнитопроводом и секционированными катушками обмоток. Статоры же 2 и 3 выполняются секционированными и в магнитном отношении, в виде секций, показанных на фиг.2.
Устройство работает следующим образом. Совокупность статоров 1, 2, 3, 4 образует четыре зоны взаимодействия с дисковым ротором 6. Например, при вращении дискового ротора 6 по часовой стрелке направление перемещения магнитного поля статора 4 также по часовой стрелке, а направление перемещения магнитного поля статора 1 против часовой стрелки. Что же касается статоров 2 и 3, то у них задействовано лишь по паре секций, каждая из которых перекрывает угол 45o. Как показано на фиг.2, каждая из пар секций, расположенных справа и слева от вертикальной оси. образует третью и четвертую зоны взаимодействия с дисковым ротором 6. При этом первой зоной можно считать область перекрытия со статором 4, а второй зоной - область перекрытия со статором 1. В третьей зоне, т.е. в секциях статора 2 и 3, расположенных слева от вертикальной оси, показанной на фиг.2, для обеспечения вращения дискового ротора 6 по часовой стрелке, направление перемещения - вверх, от секций статора 2 - к секциям статора 3. Для четвертой зоны - направление перемещения поля - вниз, от секций статора 3 к секциям статора 2. Данные четыре зоны обозначены на фиг.2 римскими цифрами. Данная структура, наряду с обеспечением вращения дискового ротора 6, имеет возможность реализации и привода поворота основания (платформы) 9. В данном случае, для обеспечения поворота платформы по часовой стрелке - см. фиг.2 - достаточно лишь изменить полярность и обусловленное ей направление перемещения поля у статора 1. Что же касается статоров 2 и 3, то у них коммутируется так же, как и статора 1 и 4, т.е. секции статоров 2 и 3 работают как один статор с направлением перемещения поля таким же, как у статоров 4 и 1, т.e. пo часовой стрелке. При этом как в том, так и в другом случаях будет наблюдаться увеличение вращающегося момента за счет уменьшения радиальных зазоров между концентричными магнитопроводами по сравнению с магнитной системой с лобовыми частями, расположенными в одной плоскости.
Введение описанного расположения лобовых частей электромеханической орбитальной системы дает возможность уменьшить массогабаритные показатели за счет более полного использования активной части ротора 6, практически приближая коэффициент использования к коэффициенту использования штатного торцевого электродвигателя. Важно заметить, что это использование практически не зависит от углового положения платформы робота.
Источники информации
1. Авторское свидетельство СССР 1459921 / А.М.Литвиненко - Промышленный робот/ опубл. Б.И. 7, 1989, В 25 J 11/00, заявка 4224478/31-08 от 08.04.87.
2. Авторское свидетельство СССР 1465305 / А.М.Литвиненко - Промышленный робот / опубл. Б. И. 10, 1989, В 25 J 11/00, заявка 4198381/31-08 oт 24.02.87.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2182534C1 |
| ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2184028C1 |
| СИСТЕМА ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТОРЦЕВОГО ТИПА | 2001 |
|
RU2190518C1 |
| ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА | 2001 |
|
RU2206954C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ВИНТОВОЙ ПРИВОД | 2001 |
|
RU2190791C1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2001 |
|
RU2184030C1 |
| ВОЛНОВОЙ ОРБИТАЛЬНЫЙ ПРИВОД | 2001 |
|
RU2213894C2 |
| ОРБИТАЛЬНЫЙ МОТОР-РЕДУКТОР | 2001 |
|
RU2217856C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ЧЕРВЯЧНЫЙ ПРИВОД | 2001 |
|
RU2204068C2 |
| ОРБИТАЛЬНЫЙ ШАГОВЫЙ МОТОР-РЕДУКТОР | 2001 |
|
RU2215358C2 |
Изобретение относится к приводам промышленных роботов, работающих преимущественно в ангулярных системах координат. Система содержит статоры и роторы, установленные на вращаемом основании с обеспечением магнитной связи и воздушного зазора со статорами. Статоры выполнены двух типов по длине с короткими и длинными концентрическими магнитопроводами, имеющими обмотки с лобовыми частями. При этом лобовые части обмоток коротких магнитопроводов вынесены в зону, примыкающую к воздушному зазору. Лобовые части обмоток длинных магнитопроводов расположены в пространстве под лобовыми частями обмоток коротких магнитопроводов. Изобретение позволит повысить эффективность устройства, увеличить вращающий момент. 2 ил.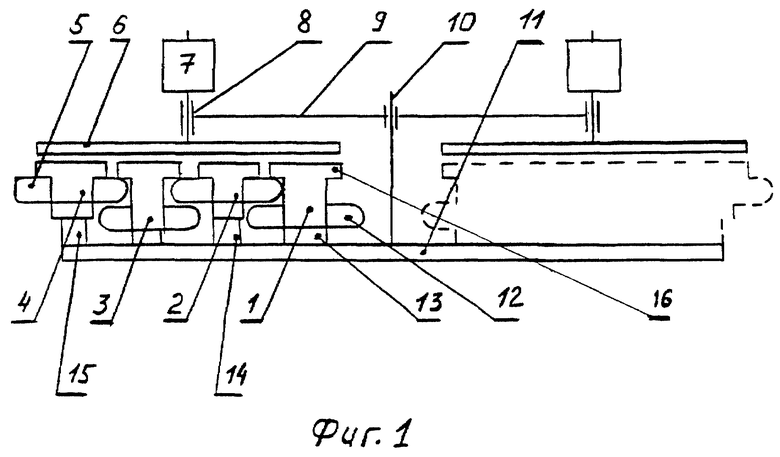
Электромеханическая орбитальная система торцевого типа промышленного робота, содержащая статоры и роторы, установленные на вращаемом основании с обеспечением магнитной связи и воздушного зазора со статорами, отличающаяся тем, что статоры выполнены двух типов по длине с короткими и длинными концентрическими магнитопроводами, имеющими обмотки с лобовыми частями, при этом лобовые части обмоток коротких магнитопроводов вынесены в зону, примыкающую к воздушному зазору, а лобовые части обмоток длинных магнитопроводов расположены в пространстве под лобовыми частями обмоток коротких магнитопроводов.
| Промышленный робот | 1987 |
|
SU1465305A1 |
| Промышленный робот | 1987 |
|
SU1459921A1 |
| ОРБИТАЛЬНЫЙ МОТОР-РЕДУКТОР | 1994 |
|
RU2071631C1 |
| US 4067998, 26.08.1986. | |||
