Изобретение относится к авиационной технике, в частности к системе управления вертолетом.
Цель изобретения упрощение конструкции, повышение надежности и технологичности автомата перекоса.
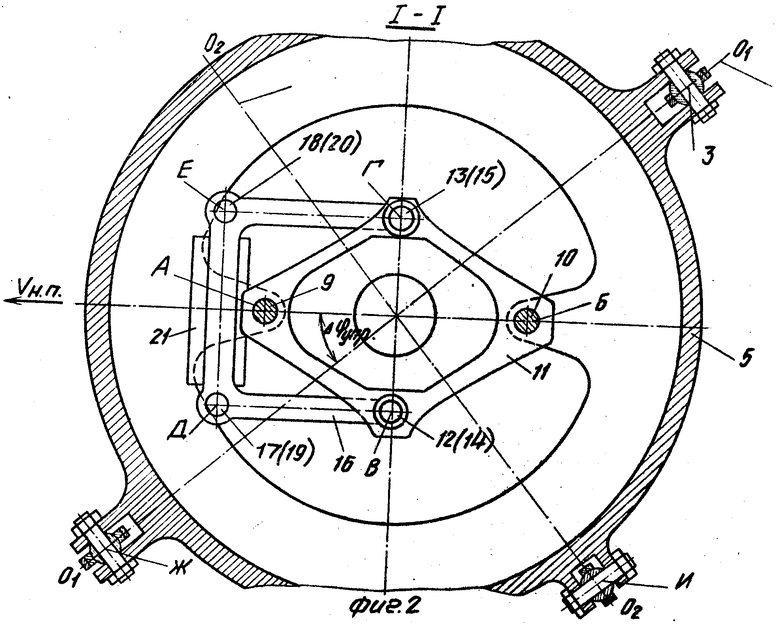
На фиг. 1 изображен общий конструктивный вид автомата перекоса; на фиг. 2 сечение I-I фиг. 1.
Вращающееся кольцо 1 с шарнирно закрепленными тягами управления лопастями 2 и поводком (шлиц-шарниров) 3 на радиально-упорном подшипнике 4 установлена на невращающемся кольце 5. Вращение тарелки 1 осуществляется поводком 3, жестко зафиксированным с валом редуктора 6, проходящем внутри невращающегося кольца 5. На невращающемся кольце 5 при помощи пальца 7 и 8 и сферических подшипников 9 и 10 подвешена рамка 11.
Точки пересечения осей пальцев 7 и 8 с соответствующими центрами сферических подшипников 9 и 10 обозначены на чертежах точками А и Б. На рамке 11 также при помощи пальцев 12 и 13 и сферических подшипников 14 и 15, в точках, обозначенных на чертежах В и Г, закреплен рычаг 16.
Рычаг 16 своим другим концом при помощи пальцев 17 и 18 и сферических подшипников 19 и 20 закреплен в точках Д и Е, на кронштейне 21, который жестко установлен на корпусе редуктора 22.
Невращающееся кольцо 5 в точках Ж, 3 и И соединено обычными крепежными элементами через сферические подшипники с гидроусилителями 24 и 25 на чертеже не показаны.
Наличие сферических подшипников 9, 10, 14 и 15 обеспечивает поворот вращающемуся кольцу 1 по сфере, что необходимо для нормальной работы системы управления вертолетом.
Для обеспечения работоспособности автомата перекоса предлагаемой конструкции необходимо, чтобы ось, проходящая через центры сферических подшипников 9 и 10 и обозначенные на чертеже точками А и Б и ось, проходящая через центры сферических подшипников 14 и 15 и обозначенные на чертеже точками В и Г, были взаимно перпендикулярны. При этом расположение устройства для удержания невращающегося кольца от смещения и поворота относительно оси приводного вала, выполненного в виде рамки 11 и рычага поворота 16, произвольно относительно плоскостей продольного и поперечного управления автомата перекоса и не связано с углом упреждения управления вертолета ΔΨупр.
Кроме того, необходимо соблюдение следующего условия: ось поворота рычага 16, проходящая через точки Д и Е должна быть параллельна оси, проходящей через центры сферических подшипников 14 и 15 (точки В и Г), соединяющих рамку 11 с рычагом 16, и ось вала редуктора 6.
Ось 01-01 проходит через шарнирные узлы закрепления гидроусилителей в точках Ж и З и через центр вращения вращающегося кольца 1 перпендикулярно им и находится в плоскости продольного управления вертолета.
Ось 02-02 проходит через шарнирный узел закрепления гидроусилителя в точке И и через центр вращения вращающегося кольца 1 перпендикулярно ей и находится в плоскости поперечного управления.
Устройство работает следующим образом.
Циклическое управление осуществляется наклоном вращающегося кольца 1 относительно двух осей 01-01 и 02-02 путем перемещения точек Ж, З и И в гидроусилителях 23, 24 и 25. При этом происходит поворот вращающегося 1 и невращающегося 5 колец в сферических подшипниках 9 и 10 относительно рамки 11 и рамки 11, совместно с вращающимся кольцом 1 и невращающимся кольцом 5 в сферических подшипниках 14 и 15 относительно рычага 16. Таким образом обеспечивается поворот невращающегося кольца 5 в любом направлении в пространстве, а через подшипник 4 обеспечивается поворот вращающегося кольца 1 в любом направлении в пространстве, что необходимо для передачи движения через тяги управления лопастями 2 к втулке несущего винта.
При этом положение рычага 16 фиксированное и зависит только от перемещения штоков гидроусилителей 23, 24 и 25 на одну и ту же величину.
Управление общим шагом осуществляется перемещением точек Ж, З и И штоков гидроусилителей вверх или вниз на одну и ту же величину. При этом, поскольку рычаг 16 и шарнирно через кронштейн 21 закреплен на корпусе редуктора 22, то вращающееся кольцо 1 и невращающееся кольцо 5 смещаются по радиусу R относительно оси, проходящей через точки Д и Е на незначительную величину, значение которой для реальной конструкции зависит от размера рычага 16.
При этом конструктивно это отклонение в пределах изменения потребного общего шага можно уменьшить вдвое. Другими словами, такое смещение практически не отразится от работоспособности несущей системы вертолета. При этом наклона невращающегося кольца 5 и рамки 1 относительно рычага 16 не происходит, так как он возможен только от расположения штоков гидроусилителей 23, 24 и 25.
При совместном циклическом управлении и управлении общим шагом осуществляется одновременное перемещение точек Ж, З и И на разные величины и, следовательно, происходит одновременный поворот невращающегося кольца 5 и вращающегося кольца 1 относительно оси, проходящей через точки Д и Е и наклон рычага 16.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ ПЕРЕКОСА НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 1994 |
|
RU2088479C1 |
| СУММИРУЮЩИЙ МЕХАНИЗМ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ОБЩИМ И ЦИКЛИЧЕСКИМ ШАГОМ ВЕРТОЛЕТОВ ТРЕХТОЧЕЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ С НАКЛОННЫМ РАСПОЛОЖЕНИЕМ ГИДРОПРИВОДОВ | 2014 |
|
RU2578706C1 |
| СПОСОБ УПРАВЛЕНИЯ НЕСУЩИМ ВИНТОМ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2203835C2 |
| АВТОМАТ ПЕРЕКОСА НЕСУЩЕГО ВИНТА ВЕРТОЛЁТА | 2004 |
|
RU2261822C1 |
| АВТОМАТ ПЕРЕКОСА ВЕРТОЛЕТА | 2019 |
|
RU2728945C1 |
| СПОСОБ УПРАВЛЕНИЯ НЕСУЩИМ ВИНТОМ ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2371351C2 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2020 |
|
RU2751168C1 |
| МЕХАНИЗМ АВТОМАТА ПЕРЕКОСА ВЕРТОЛЕТА | 2011 |
|
RU2485017C2 |
| АВТОМАТ ПЕРЕКОСА ВЕРТОЛЕТА Е.С.ВАЖИНСКОГО | 2012 |
|
RU2490172C1 |
| НЕСУЩИЙ ВИНТ | 2005 |
|
RU2281885C1 |
Изобретение относится к авиационной технике, в частности к системам управления вертолетом. Целью изобретения является упрощение конструкции, повышение надежности и технологичности автомата перекоса. Автомат перекоса воздушного винта вертолета содержит вращающееся кольцо 1, тяги управления лопастями 2, шлиц шарнир 3, соединяющий вращающееся кольцо 1 с приводным валом от редуктора 6. Невращающееся кольцо 5 шарнирно присоединено к штокам трех гидроусилителей 23, 24 и 25 системы управления.Подшипник 4 установлен между вращающимся 1 и невращающимся 5 кольцом. Рамка 11 соединена в 2 х точках при помощи сферических подшипников 9 и 10 с невращающимся кольцом 1. Автомат перекоса снабжен рычагом 6, шарнирно установленным на корпусе редуктора, а рамка 11 соединена с рычагом 16 в двух точках посредством сферических подшипников 14 и 15. Ось, проходящая через центры сферических подшипников 9 и 10 и ось, проходящая через центры сферических подшипников 14 и 15, взаимно перпендикулярны. Ось поворота рычага 16 параллельна оси, проходящей через центры сферических подшипников 14 и 15 и ось вала несущего винта. 2 ил.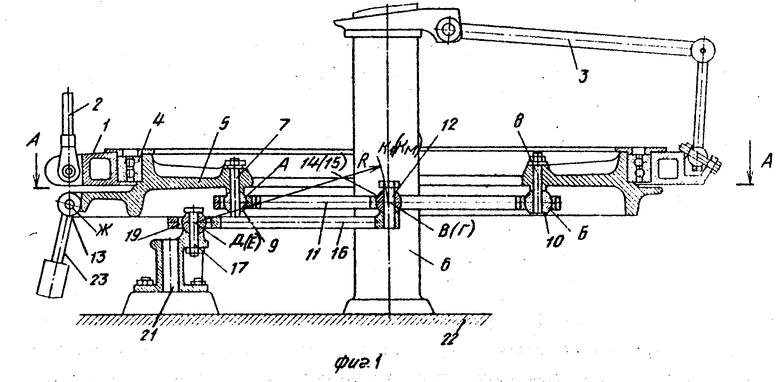
АВТОМАТ ПЕРЕКОСА НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА, содержащий вращающееся кольцо, тяги управления лопастями, шлиц-шарнир, соединяющий вращающееся кольцо с приводным валом от редуктора, невращающееся кольцо с шарнирно присоединенными к нему штоками трех гидроусилителей системы управления, подшипник между вращающимся и невращающимся кольцами и рамку, соединенную в двух точках при помощи сферических подшипников с невращающимся кольцом, отличающийся тем, что, с целью упрощения конструкции, повышения надежности и технологичности автомата перекоса, последний снабжен рычагом, шарнирно установленным на корпусе редуктора и соединенным с рамкой в двух точках с помощью сферических подшипников, при этом ось, проходящая через центры сферических подшипников, соединяющих рамку с невращающимся кольцом и ось, проходящая через центры сферических подшипников, соединяющих рамку с рычагом, взаимно перпендикулярны, а ось поворота рычага параллельна оси проходящей через центры сферических подшипников, соединяющих рамку с рычагом, и ось вала несущего винта.
| Заявка ФРГ N 3620794, кл | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
