Изобретение относится к измерительной технике и может быть использовано в машиностроении и металлургии, например, при измерении размера объекта, движущегося в ограниченном пространстве, в частности в технологическом процессе, например, для контроля длин заготовок, движущихся по транспортерам пил холодной резки.
Известно интерференционное устройство для измерения перемещений объектов (Авторское свидетельство РФ № 1663416, кл. G 01 В 11/16, опубл. 15.07.1991, бюл. № 26), содержащее устройство монохроматического излучения, две дисперсионные призмы с телескопической системой и двумя отражателями, причем второй отражатель выполнен в виде многоступенчатого зеркала.
При работе устройства пучки света от источников направляются на дисперсионную призму, после прохождения которой сходятся в один луч, который расщепляется телескопической системой в плоский пучок.
Далее пучок делится светоделителем на два, которые, отразившись от зеркала и отражателя, расщепляются по длинам волн дисперсионной призмой на два пучка и формируют интерференционные картины в виде полос с различной интенсивностью.
Недостатком устройства является то, что при изменении пределов измерения изменяется использование активной площади преобразователя света вследствие различной площади отверстий в диафрагме, соответствующих различным пределам измерения. Это ведет к изменению величины выходного электрического сигнала, соответствующего пределу измерения, и к изменению характеристик фотоэлектрической схемы измерения и требует проведения тарировки или дополнительной настройки.
Известно устройство (патент РФ № 2247936, кл. G 01 В 7/00, G 01 В 7/16, опубл. 10.03.2005), которое содержит три идентичных датчика расстояния, подключенных к соответствующим измерительным преобразователям, и блок обработки информации. Два датчика расстояния установлены относительно контролирующего объекта дифференциально, а третий жестко закреплен на постоянном и известном расстоянии от поверхности контролируемого объекта. Блок обработки информации содержит блок сложения, два блока вычитания, три блока умножения, два блока деления и блок памяти. В качестве информативной величины, характеризующей перемещение объекта, принимается перемещение точки, расположенной на одной из граней объекта. Величина деформации определяется по интегральной деформации объекта между его крайними точками.
Недостатком данного устройства является высокая стоимость измерительной техники.
Наиболее близким к заявляемому устройству является система контроля размеров движущегося объекта (патент РФ на полезную модель №55965, кл. G 01 В 11/00, G 01 В 11/02, опубл. 27.08.2006), содержащая датчик наличия объекта, а в качестве измерительных датчиков используют два лазерных дальномера, расположенных по обеим сторонам и на одном уровне с объектом, при этом лучи лазерных дальномеров направлены навстречу друг другу и перпендикулярно направлению движения объекта, а при одновременном параллельном перемещении 2-х объектов дополнительно подключают еще два лазерных дальномера, которые устанавливают ниже уровня движущихся объектов, причем лазерный луч направлен вверх под углом, необходимым для попадания на боковую поверхность объекта.
Недостатком данной системы контроля является невысокая надежность определения длины объекта при его движении.
Техническим результатом изобретения является обеспечение возможности измерения размера движущегося объекта посредством ориентирования лазерного дальномера, причем лазерный луч направлен к траектории движения объекта под углом, необходимым для попадания на торцевую поверхность объекта и индикации результатов измерения.
Технический результат достигается за счет комплекса контроля размера движущегося объекта, содержащего в качестве измерительного датчика лазерный дальномер, подключенный к блоку обработки информации и установленный под углом к поверхности объекта, блок индикации, который соединен с блоком обработки информации и лазерным дальномером посредством кабеля связи, и устройство ориентирования, на котором жестко закреплен лазерный дальномер, причем лазерный луч лазерного дальномера направляют к траектории движущегося объекта под углом, необходимым для попадания на торцевую поверхность объекта.
Изобретение поясняется чертежом.
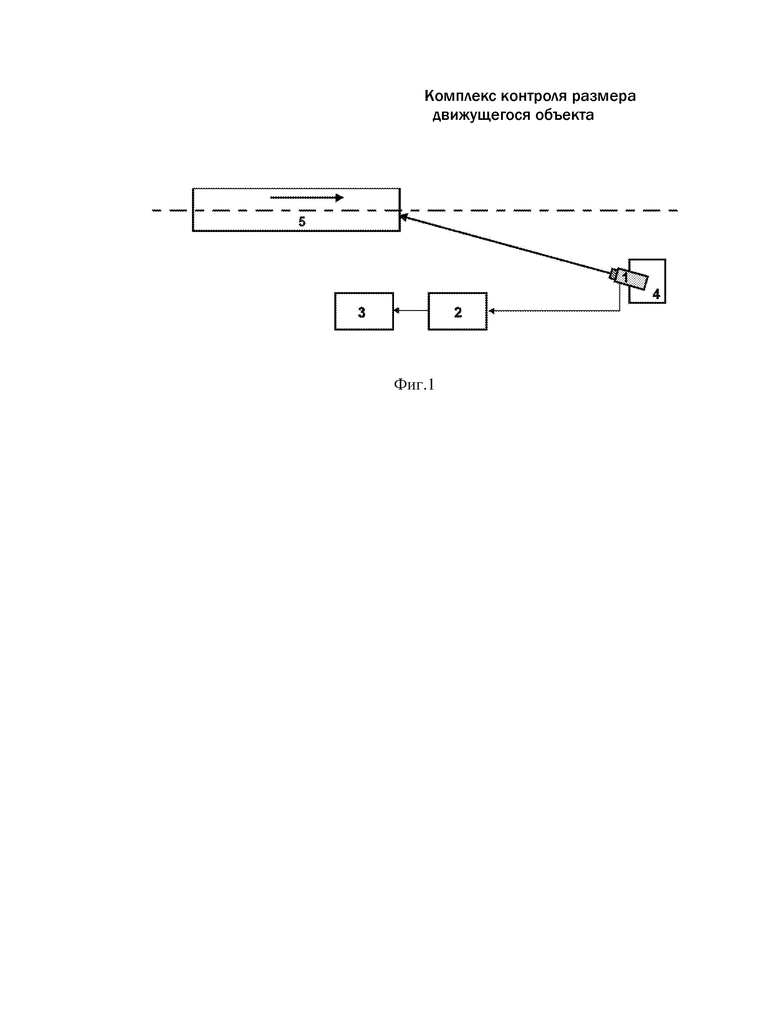
На фиг.1 показана функциональная схема, реализующая предлагаемое техническое решение.
Комплекс контроля размера движущегося объекта содержит лазерный дальномер 1, блок обработки информации 2, блок индикации 3 и устройство 4 для ориентирования лазерного дальномера.
Принцип работы комплекса основан на использовании лазерного дальномера, позволяющего бесконтактным методом с помощью измерения задержки времени между посланным и отраженным лазерным излучением определять расстояние до поверхности движущегося объекта.
Комплекс работает следующим образом.
Лазерный дальномер 1 комплекса осуществляет зондирование торца движущейся объекта (заготовки) 5 лазерным излучением и производит измерение расстояния до него (торца). Для обеспечения взаимного положения между траекторией движения объекта и лазерным лучом с помощью устройства ориентирования 4 угловое положение лазерного дальномера 1 относительно траектории движения объекта (заготовки) предварительно ориентируют. Показания лазерного дальномера 1 в цифровом виде передаются в блок обработки информации 2. Блок обработки информации 2 осуществляет сбор информации о расстоянии от дальномера до поверхности торца заготовки, расчет значений её текущей длины и передачу информации в блок индикации 3. Блок индикации 3 показывает длину заготовки.
Комплекс предназначен для контроля длин каждой из отрезанных заготовок, движущихся по транспортерам пил холодной резки.
Пример реализации комплекса
В состав комплекса входят:
- лазерный дальномер;
- устройство для ориентирования лазерного дальномера
- блок обработки информации;
- блок индикации;
- кабели питания и связи.
Лазерный дальномер 1 и устройство ориентирования 4 жестко закреплены между собой и располагаются непосредственно сбоку от транспортера пил холодной резки. Блок обработки информации 2 и блок индикации 3 располагают на технологическом посту и соединяют с лазерным дальномером 1 кабелями связи и питания.
Пример.
Комплекс контроля размера движущегося объекта разработан и опробован в АО «ЕВРАЗ Нижнетагильском металлургическом комбинате» в колесобандажном цехе на пилах холодной резки заготовок.
Технические характеристики устройства приведены в таблице 1
Таблица 1
размещения лазерных дальномеров, °С
Достоинством предложенного комплекса контроля размера движущегося объекта является его высокая надежность и достоверность измерений при определении длины движущегося объекта.
Таким образом, заявляемое техническое решение полностью выполняет технический результат.
Проведенный анализ уровня техники, включающий поиск по патентам и научно- технической информации и выявление источников, содержащих сведения об аналогах заявляемого технического решения, позволил установить, что заявитель не обнаружил источников, характеризующихся признаками, тождественными всем существенным признакам заявляемого изобретения.
Следовательно, заявляемое изобретение соответствует критерию "новизна".
Заявляемое изобретение может быть реализовано промышленным способом в условиях серийного производства с использованием известных технических средств, технологий и материалов и отвечает требованиям критерия «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| Способ определения фактического состояния канала ствола артиллерийских орудий и устройство для его реализации | 2023 |
|
RU2828997C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ СТРЕЛЫ ПРОВЕСА ВОЛОКОННО-ОПТИЧЕСКИХ КАБЕЛЕЙ (ВОК), ПОДВЕШЕННЫХ НА ОПОРАХ КОНТАКТНОЙ СЕТИ | 2007 |
|
RU2342261C1 |
| УНИВЕРСАЛЬНЫЙ ТОПОПРИВЯЗЧИК (УТП) НА БАЗЕ ЛЕГКОВОГО ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2009 |
|
RU2413637C1 |
| Система лазерного сканирования для определения параметров транспортного средства в потоке движения | 2023 |
|
RU2803398C1 |
| Способ ориентирования мобильных объектов относительно объекта с известным дирекционным углом | 2018 |
|
RU2692945C1 |
| ОПТИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА | 2002 |
|
RU2247941C2 |
| СИСТЕМА ПРИЦЕЛИВАНИЯ ОРУЖИЯ | 2021 |
|
RU2784528C1 |
| Способ контроля параметров лазерного канала управления прицельных комплексов и устройство диагностики для его осуществления | 2023 |
|
RU2824220C1 |
| МНОГОЦЕЛЕВОЙ МНОГОПОЛОСНЫЙ ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТА С ВИДЕОФИКСАЦИЕЙ | 2017 |
|
RU2658120C1 |
Изобретение относится к измерительной технике и может быть использовано в машиностроении и металлургии, например, при измерении размера объекта, движущегося в ограниченном пространстве, в частности в технологическом процессе, например, для контроля длин заготовок, движущихся по транспортерам пил холодной резки. Заявленный комплекс контроля размера движущегося объекта содержит в качестве измерительного датчика лазерный дальномер, подключенный к блоку обработки информации и установленный под углом к поверхности объекта, блок индикации, который соединен с блоком обработки информации и лазерным дальномером посредством кабеля связи, и устройство ориентирования, на котором жестко закреплен лазерный дальномер. Причем лазерный луч лазерного дальномера направлен к траектории движения объекта под углом, необходимым для попадания на торцевую поверхность объекта. Технический результат - обеспечение возможности измерения размера движущегося объекта посредством ориентирования лазерного дальномера. 1 ил., 1 табл.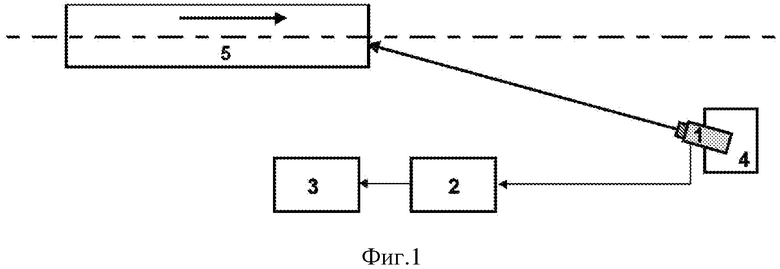
Комплекс контроля размера движущегося объекта, содержащий в качестве измерительного датчика лазерный дальномер (1), подключенный к блоку обработки информации (2) и установленный под углом к поверхности объекта, отличающийся тем, что он дополнительно содержит блок индикации (3), который соединен с блоком обработки информации и лазерным дальномером (1) посредством кабеля связи, и устройство ориентирования (4), на котором жестко закреплен лазерный дальномер (1), причем лазерный луч лазерного дальномера (1) направляют к траектории движущегося объекта (5) под углом, необходимым для попадания на торцевую поверхность объекта.
| Способ вулканизации резиновых смесей | 1938 |
|
SU55965A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2012 |
|
RU2521220C2 |
| ОПТИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА | 2002 |
|
RU2247941C2 |
| Устройство для замера увеличения диаметра паропровода | 1952 |
|
SU95111A1 |
| US 2013133917 A1, 31.05.2012. | |||

