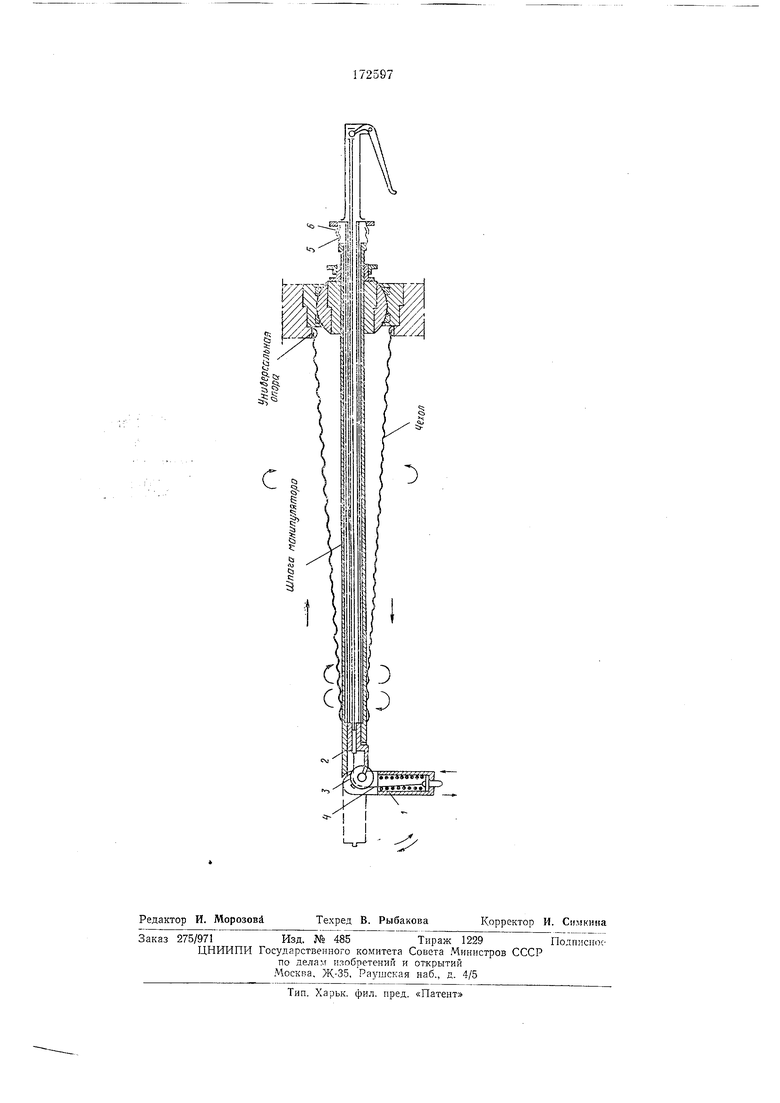
Известны шпатовые манипуляторы, содержащие заключенную в шаровом шарнире трубу, в которой пропущены тросы или жесткие тяги, соединенные с кистью захвата и манипулирования, а также рукоятки управления. В этих устройствах поворот кисти не превышает 45° и отсутствует автоматическая фиксация ее положения. Предлагаемый манипулятор отличается тем, что в нем установлена поворачивающая кисть и фиксирующая ее положение винтовая пара, гайка которой расположена на рукоятке управления, а винтовая нарезка нанесена на конце рычага, прилегающем к рукоятке; на другом конце рычага установлен ролик с гибким элементом для поворота кисти под углом 90°. На чертеже показан предлагаемый манипулятор в разрезе. Кисть захвата У шарнирно соединена с трубчатым рычагом 2, на торце которого установлен ролик 3 с гибким элементом 4. На противоположном конце трубчатого рычага 2 нарезана самотормозящая резьба 5, на которую навинчена гайка 6. При вращении гайки пальцем оператора рычаг 2 поворачивает кисть на нужный угол и, благодаря самоторможению винта, удерживает ее в нужном положении до нового поворота гайки. В другой плоскости кисть захвата поворачивается натяжением гибкого элемента 4 через ролик 3, что создает возможность поворота кисти на угол до 90°. Формула изобретения Шпаговый манипулятор, содержащий кисть захвата, трубчатый рычаг передачи, укрепляемый при помощи кольца эластичный чехол и рукоятку управления, отличающийся тем, что, с целью расширения возможности маневрирования кистью и обеспечения автоматической фиксации ее положения, управление перемещением кисти выполнено в виде самотормозящей винтовой пары, гайка которой установлена на рукоятке и вращается пальцем руки оператора, а винтовая нарезка нанесена на прилегающем к рукоятке конце трубчатого рычага, на другом конце которого установлен ролик с гибким элементом, закрепленным на хвостовике кисти.
| название | год | авторы | номер документа |
|---|---|---|---|
| Орган ручного управления инвалидной коляской | 1990 |
|
SU1773792A1 |
| Устройство для передачи изделий с головками с транспортного средства на рабочую позицию | 1985 |
|
SU1351852A1 |
| ИСКУССТВЕННЫЙ ПАЛЕЦ | 2014 |
|
RU2667624C2 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| СТАНОК ДЛЯ ОБРУБКИ, КЛЕПКИ, ТРАМБОВКИ | 2009 |
|
RU2412783C1 |
| ВСЕСЮЮЗНАЯ jПАШТНО • аЖ/^ КлЧ БИ&лио;.:кА j | 1971 |
|
SU319467A1 |
| Устройство для закрепленияРЕНТгЕНОВСКОгО АппАРАТА | 1978 |
|
SU814631A1 |
| МАНИПУЛЯТОР МАТОЧНЫЙ | 2000 |
|
RU2175528C1 |
| Манипулятор | 1979 |
|
SU814722A2 |
| Вилочный захват подъемно-транспортной машины | 1984 |
|
SU1266836A1 |