Устройство подвижки относится к точной механике и может быть использовано для перемещения образцов по двум или трем координатам, например, в зондовой микроскопии.
Известно устройство подвижки, включающее в себя основание, на котором установлен базовый элемент, также установлен первый передаточный элемент с первым приводом по координате X и первым подвижным элементом, сопряженный со вторым передаточным элементом, на котором расположен второй подвижный элемент и второй привод по координате Y, посредством переходного элемента, включающее также каретку, расположенную на базовом элементе с возможностью перемещения по координатам X, Y, и держатель образца, сопряженный с кареткой [Патент RU 2306621]. Это устройство выбрано в качестве прототипа предложенного решения.
Недостаток этого устройства заключается в том, что в нем отсутствует кинематическая развязка каретки и основания по координате Z. Это снижает точностные характеристики устройства и его функциональные возможности.
Технический результат изобретения заключается в повышении точностных характеристик устройства и расширении его функциональных возможностей.
Указанный технический результат достигается тем, что в устройстве, включающем в себя основание, на котором установлен базовый элемент, также установлен первый передаточный элемент с первым приводом по координате X и первым подвижным элементом, сопряженный со вторым передаточным элементом, на котором расположен второй подвижный элемент и второй привод по координате Y, посредством переходного элемента, включающее также каретку, расположенную на базовом элементе с возможностью перемещения по координатам X, Y, и держатель образца, сопряженный с кареткой, каретка упруго сопряжена с переходным элементом.
Существует вариант, в котором упругое сопряжение каретки и переходного элемента осуществлено посредством второго передаточного элемента.
Существует вариант, в котором упругое сопряжение каретки и переходного элемента осуществляется посредством плоской пружины.
Существует вариант, в котором упругое сопряжение каретки и переходного элемента выполнено в виде плоской перфорированной пружины.
Существует вариант, в котором переходной элемент выполнен в виде рельсовой направляющей.
Существует вариант, в котором переходной элемент выполнен в виде плоской пружины.
Существует вариант, в котором каретка установлена на базовом элементе посредством первого промежуточного элемента и второго промежуточного элемента, подключенных к модулю контроля давления и обеспечивающих вакуумный прижим.
Существует вариант, в котором каретка установлена на базовом элементе посредством первого промежуточного элемента и второго промежуточного элемента, подключенных к модулю контроля давления и обеспечивающих аэростатический эффект.
Существует вариант, в котором каретка установлена на базовом элемент посредством трех приводов по координате Z.
Существует вариант, в котором первый привод включает первый переходной элемент, сопряженный со вторым переходным элементом и третьим переходным элементом, включает также первый двигатель и второй двигатель, при этом первый переходной элемент соединен с первым подвижным элементом, второй переходной элемент соединен с первым двигателем с возможностью отсоединения от него, третий переходной элемент соединен со вторым двигателем с возможностью отсоединения от него.
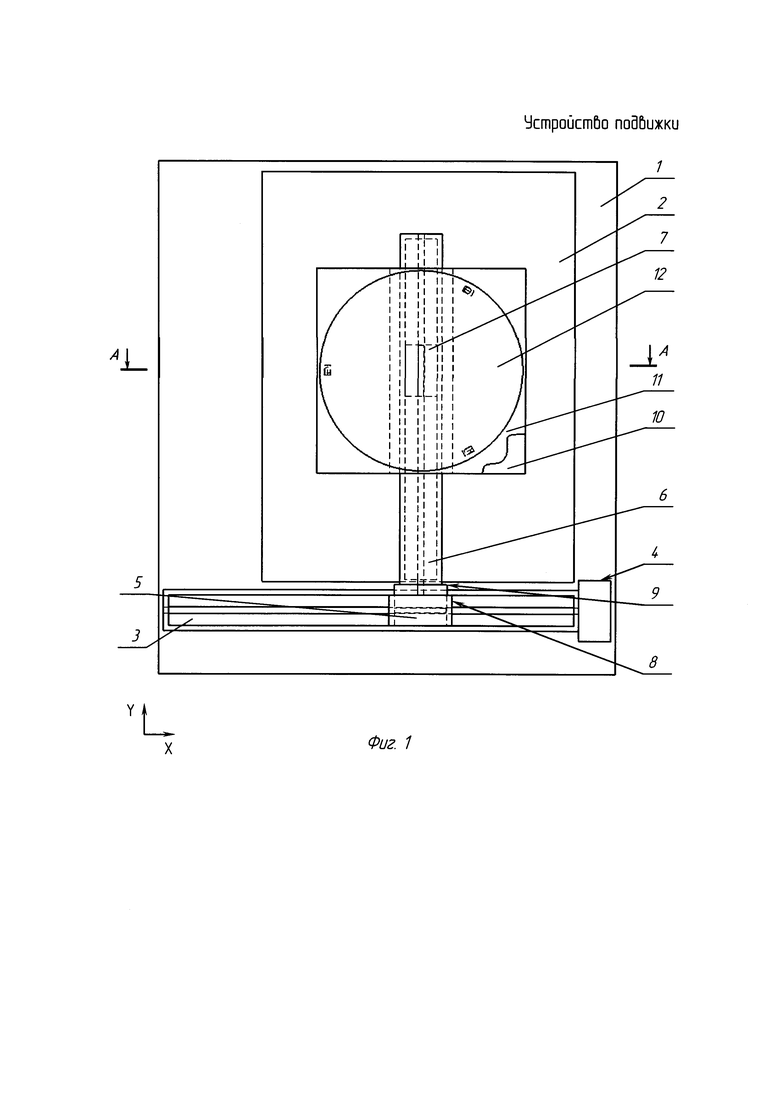
На фиг. 1 изображена схема устройства подвижки в общем виде.
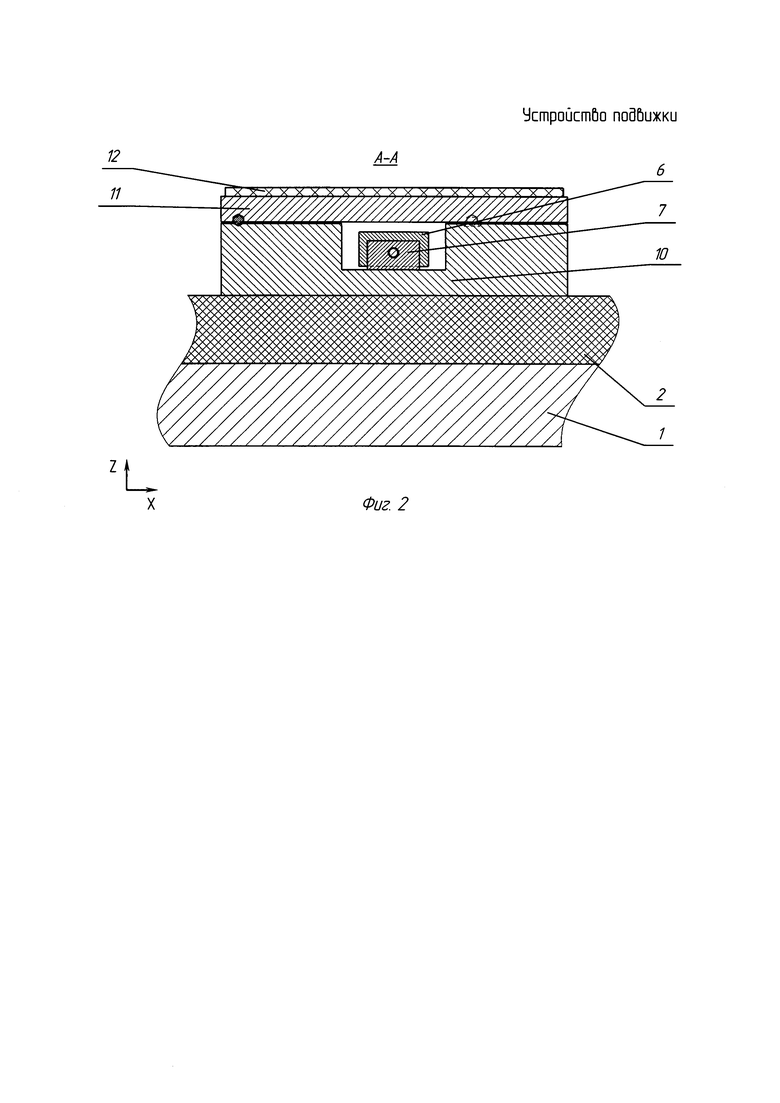
На фиг. 2 изображено сечение А-А по фиг. 1.
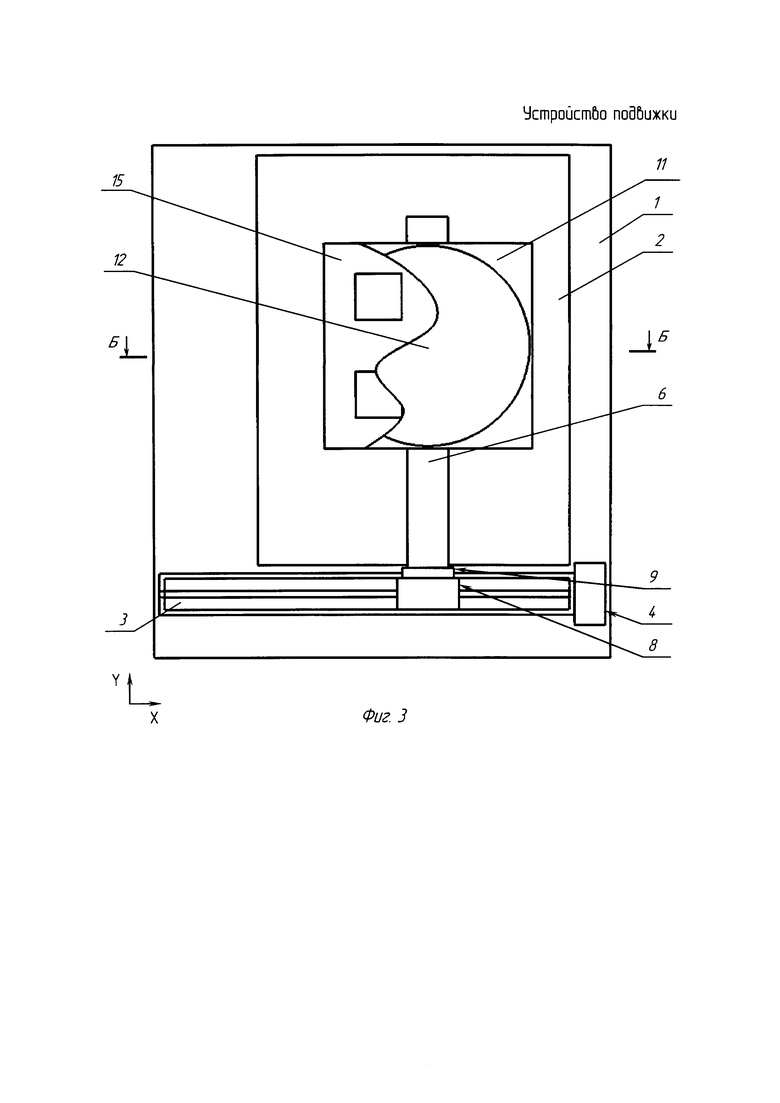
На фиг. 3 изображен вариант устройства подвижки с вакуумным прижимом.
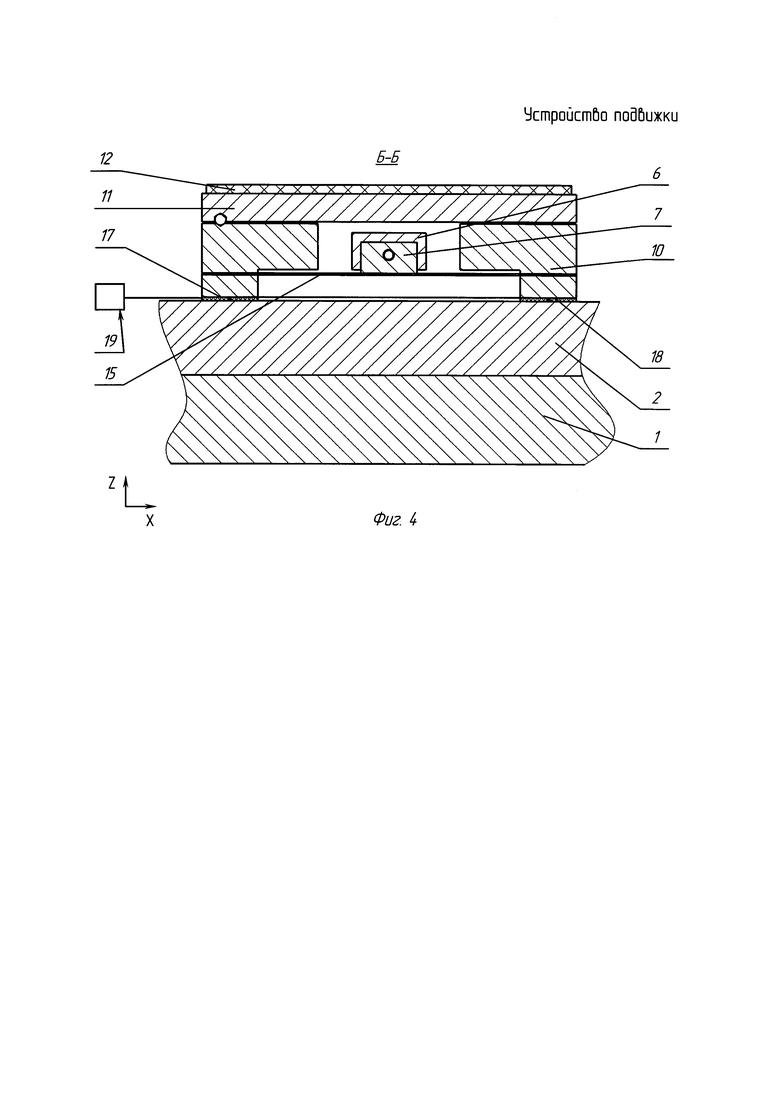
На фиг. 4 изображено сечение Б-Б с плоской пружиной по фиг. 2.
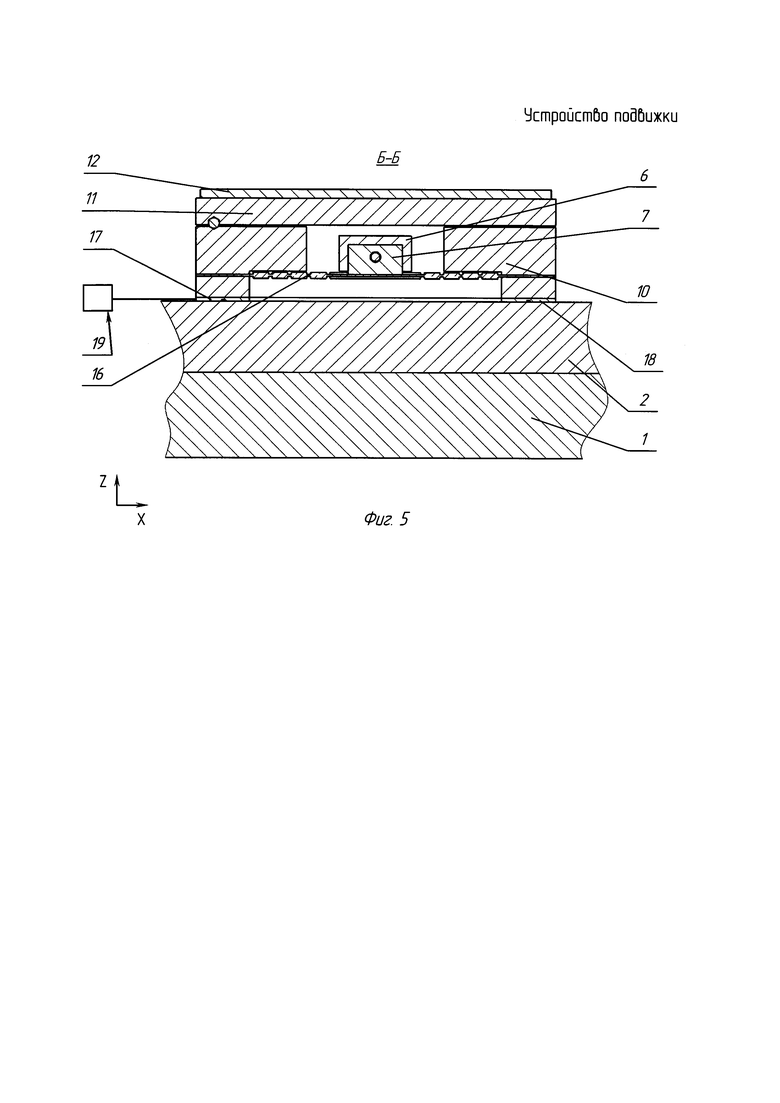
На фиг. 5 изображено сечение Б-Б с перфорированной пружиной по фиг. 2.
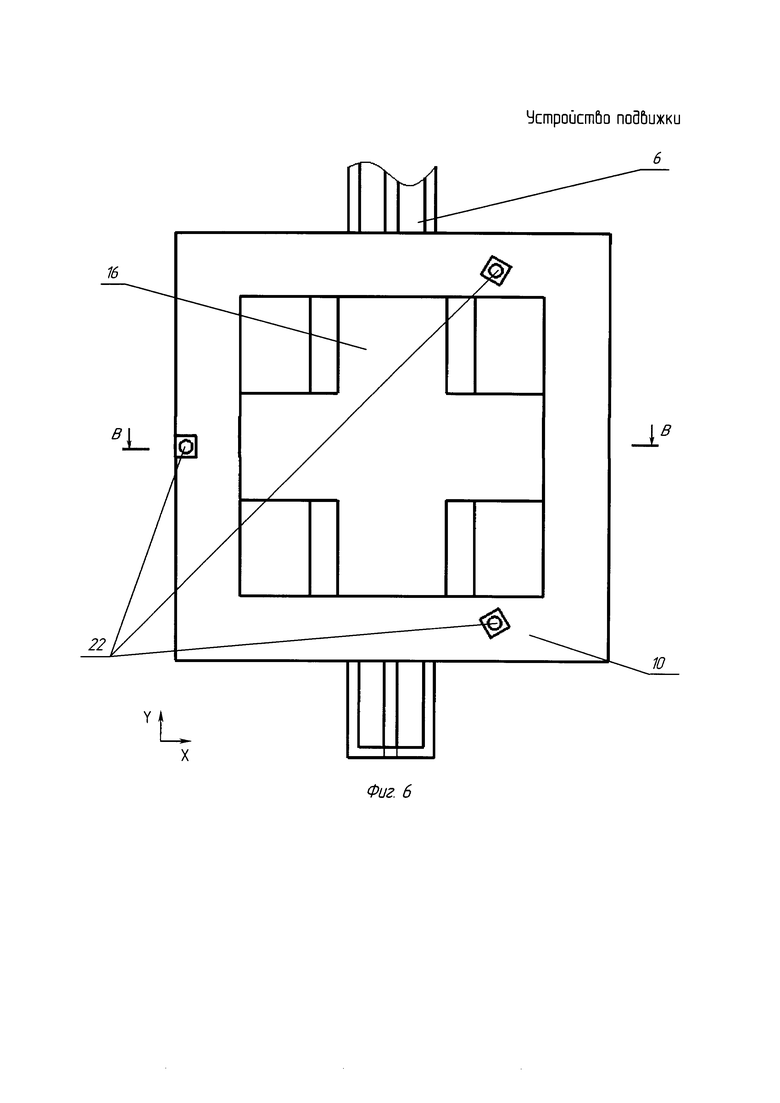
На фиг. 6 изображен вариант устройства подвижки с тремя приводами по координате Z.
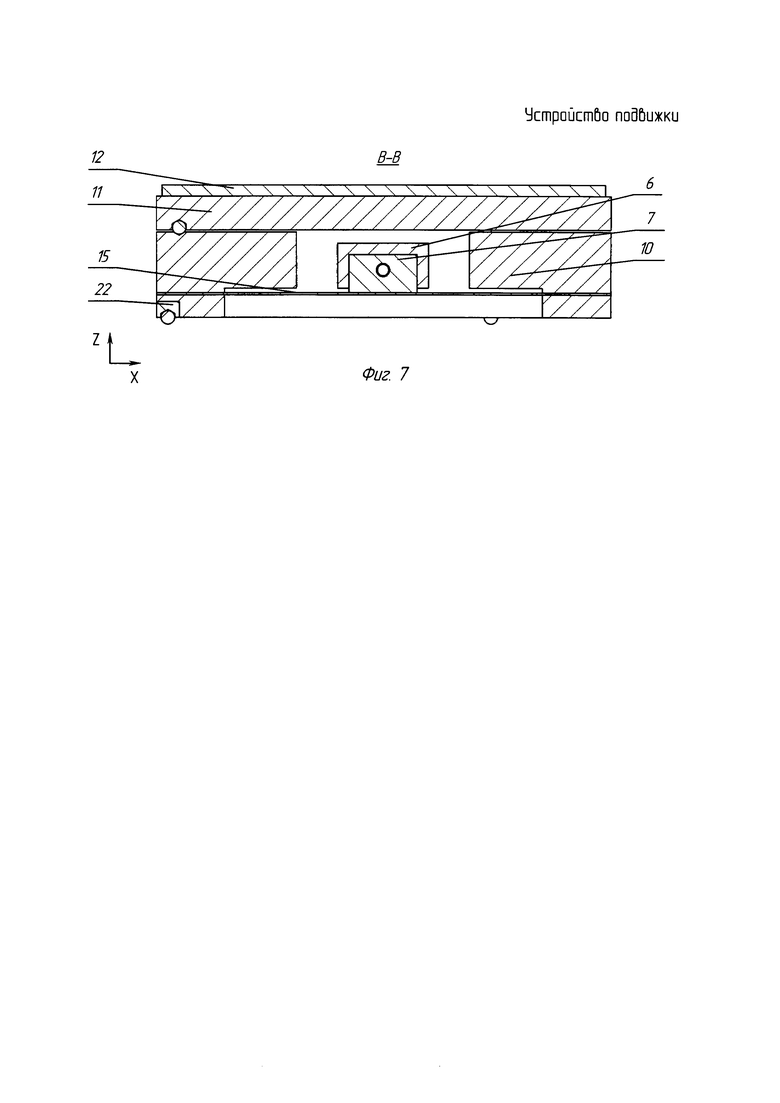
На фиг. 7 изображено сечение В-В по фиг. 6.
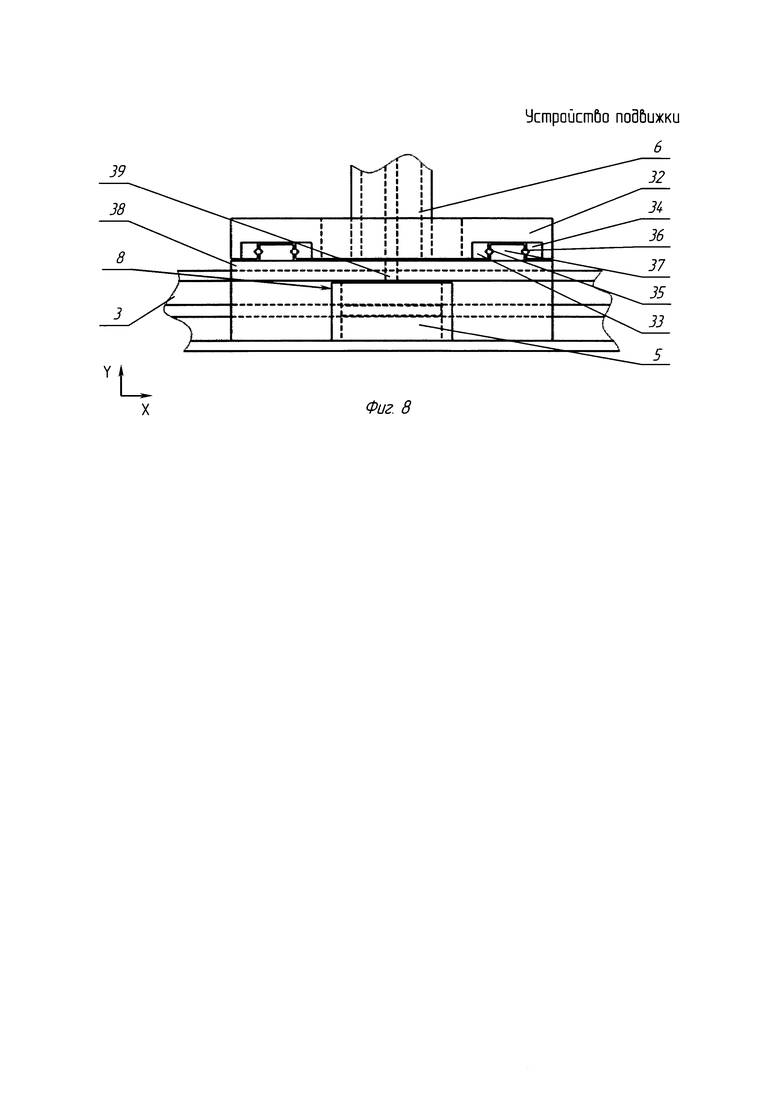
На фиг. 8 изображен вариант реализации переходного элемента.
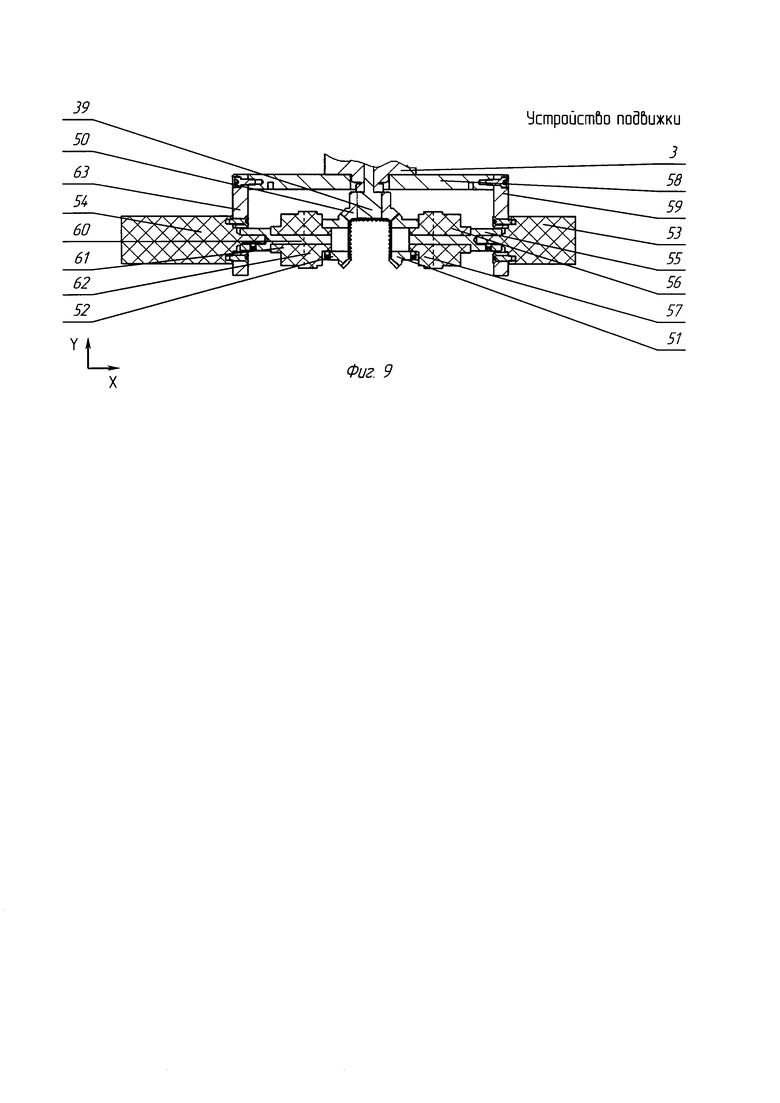
На фиг. 9 изображен вариант реализации первого и второго приводов.
Устройство подвижки включает в себя основание 1, на котором установлен базовый элемент 2. Основание 1 может быть выполнено в виде металлической станины. Базовый элемент 2 может быть выполнен в виде гранитной станины. На основании 1 также установлен первый передаточный элемент 3 с первым приводом по координате X 4 и первым подвижным элементом 5, сопряженный со вторым передаточным элементом 6, на котором расположен второй подвижный элемент 7 и второй привод по координате Y 8. Первый передаточный элемент 3 может быть выполнено в виде направляющей, сопряженной с винтовой передачей NB Bearing BG2605A. Первый привод 4 может быть выполнен в виде шагового электродвигателя Faulhaber AM2224-R3-V-12-75-30. Первый подвижный элемент 5 может быть выполнено в виде направляющей, сопряженной с направляющей первого передаточного элемента 3, и образовывать шариковинтовую передачу с винтовой передачей первого передаточного элемента 3. Второй передаточный элемент 6 может быть выполнено в виде направляющей, сопряженной с винтовой передачей NB Bearing BG2605A. Второй подвижный элемент 7 может быть выполнено в виде направляющей, сопряженной с направляющей второго передаточного элемента 6, и образовывать шариковинтовую передачу с винтовой передачей второго передаточного элемента 6. Второй привод 8 может быть выполнено в виде шагового электродвигателя Faulhaber AM2224-R3-V-12-75-30. Первый передаточный элемент 3 сопряжен со вторым передаточным элементом 6 посредством переходного элемента 9. Устройство подвижки включает также каретку 10, расположенную на базовом элементе 2 с возможностью перемещения по координатам X, Y, и держатель образца 11, сопряженный с кареткой 10. При этом каретка 10 упруго сопряжена с переходным элементом 9. Каретка 10 может быть выполнена в виде цельной металлической детали. Держатель образца 11 может быть выполнено в виде системы вакуумного удержания.
В одном из вариантов упругое сопряжение каретки 10 и переходного элемента 9 осуществлено посредством второго передаточного элемента 6.
В одном из вариантов упругое сопряжение каретки 10 и переходного элемента 9 осуществляется посредством плоской пружины 15. Плоская пружина 15 может быть выполнена в виде листа крестообразной формы из сплава 36НХТЮ.
В одном из вариантов упругое сопряжение каретки 10 и переходного элемента 9 выполнено в виде плоской перфорированной пружины 16. Плоская перфорированная пружина 16 может быть выполнено в виде листа крестообразной формы из сплава 36НХТЮ с перфорацией.
В одном из вариантов переходной элемент 9 выполнен, например, в виде рельсовой направляющей (см. ниже)
В одном из вариантов переходной элемент 9 изготовлен, например, из металлического листа прямоугольной формы.
В одном из вариантов каретка 10 установлена на базовом элементе 2 посредством первого промежуточного элемента 17 и второго промежуточного элемента 18, подключенных к модулю контроля давления 19 и обеспечивающих вакуумный прижим. Первый промежуточный элемент 17 и второй промежуточный элемент 18 могут быть выполнены в виде сапфировых пластин с вакуумным каналом. В качестве модуля контроля давления 19 можно использовать масляный вакуумный насос.
В одном из вариантов каретка 10 установлена на базовом элементе 2 посредством первого промежуточного элемента 17 и второго промежуточного элемента 18, подключенных к модулю контроля давления 19 и обеспечивающих аэростатический эффект.
В одном из вариантов каретка 10 установлена на базовом элементе 2 посредством трех приводов 22, обеспечивающих перемещение по координате Z. В качестве привода 22 можно использовать шаговый электродвигатель Faulhaber AM1020-2R-V-6-65-08-10/1K с редуктором 1024:1, сопряженный с винтовой передачей и направляющей. В одном из вариантов переходной элемент 9 выполнен в виде рельсовой направляющей, состоящей из первой рельсы направляющей 33 и второй рельсы направляющей 34, закрепленных на первом переходном элементе 32, закрепленном на втором передаточном элементе 6 со вторым приводом 8, и сопряженных с центральной рельсой направляющей 37 при помощи первого набора подшипников 35 и второго набора подшипников 36. Центральная рельса закреплена на втором переходном элементе 38, закрепленном на первом подвижном элементе 5.
В одном из вариантов первый привод 4 включает первый переходной элемент 50, сопряженный со вторым переходным элементом 51 и третьим переходным элементом 52. Первый привод 4 включает также первый двигатель 53 и второй двигатель 54. При этом первый переходной элемент 50 соединен с первым подвижным элементом 5 посредством винтовой передачи 39, входящей в состав первого передаточного элемента 3, второй переходной элемент 51 соединен с первым двигателем 53 с возможностью отсоединения от него, третий переходной элемент 52 соединен со вторым двигателем 54 с возможностью отсоединения от него. Первый переходной элемент 50, второй переходной элемент 51 и третий переходной элемент 52 могут быть выполнены в виде шестерней. Первый двигатель 53 может быть выполнен в виде шагового электродвигателя Faulhaber AM2224-R3-V-12-75-30 с редукцией 14:1, второй двигатель 54 может быть выполнен в виде шагового электродвигателя Faulhaber AM2224-R3-V-12-75-30 с редукцией 989:1. Сопряжение второго переходного элемента 51 с первым двигателем 53 осуществляется посредством первого переходного вала 55, закрепленного на первом двигателе 53, входной части первой электромагнитной муфты 56, закрепленной на первом валу 55, и выходной части электромагнитной муфты 57, закрепленной на втором переходном элементе 51. Входная часть первой электромагнитной муфты 56 может сцепляться и расцепляться с выходной частью электромагнитной муфты 57 посредством подачи электрического сигнала. Сопряжение третьего переходного элемента 52 со вторым двигателем 54 осуществляется посредством второго переходного вала 60, закрепленного на втором двигателе 54, входной части второй электромагнитной муфты 61, закрепленной на втором переходном валу 60, и выходной части второй электромагнитной муфты 62, закрепленной на третьем переходном элементе 52. Входная часть второй электромагнитной муфты 61 может сцепляться и расцепляться с выходной частью электромагнитной муфты 62 посредством подачи электрического сигнала. Первый двигатель 53 закреплен на первом подстроечном элементе 59, второй двигатель 54 закреплен на втором подстроечном элементе 63. Регулировка взаимного положения первого переходного элемента 50, второго переходного элемента 51 и третьего переходного элемента 52 осуществляется путем регулировки положения первого подстроенного элемента 59 и второго подстроенного элемента 63, сопряженных с держателем 58, на котором закреплен первый передаточный элемент 3 с винтовой передачей 39 и первым переходным элементом 50. Устройство подвижки работает следующим образом. Первый привод 4 предает вращение первому передаточному элементу 3, который в свою очередь преобразует вращение в поступательное движение первого подвижного элемента 4 вдоль оси X. Поступательное движение подвижного элемента 4 передается держателю образца 11 через переходной элемент 9, второй передаточный элемент 4 и каретку 10, которая в свою очередь расположена на базовом элементе 2 и в процессе поступательного движения скользит по базовому элементу 2. Поступательное движение каретки 10 по оси Y осуществляется благодаря преобразованию вращательного движения привода 8 в линейное перемещение подвижного элемента 7 посредством второго передаточного элемента 6. Отработка неровности и наклона базового элемента 2 по отношению к направлениям поступательного движения X и Y осуществляется благодаря упругому сопряжению каретки 10 с переходным элементом 9, а также вертикальному перемещению каретки 10 относительно первого подвижного элемента 4 посредством переходного элемента 9.
То, что в устройстве подвижки, включающем в себя основание 1, на котором установлен базовый элемент 2, также установлен первый передаточный элемент 3 с первым приводом по координате X 4 и первым подвижным элементом 5, сопряженный со вторым передаточным элементом 6, на котором расположен второй подвижный элемент 7 и второй привод по координате Y 8, посредством переходного элемента 9, включающее также каретку 10, расположенную на базовом элементе 2 с возможностью перемещения по координатам X, Y и держатель образца 11, сопряженный с кареткой 10, каретка 10 упруго сопряжена с переходным элементом 9 (а соответственно и с основанием 1) приводит к улучшению динамических характеристик перемещения каретки 10. Это повышает точностные характеристики перемещения каретки 10 и расширяет функциональные возможности устройства.
То, что упругое сопряжение каретки 10 и переходного элемента 9 осуществлено посредством второго передаточного элемента 6, приводит к упрощению конструкции.
То, что упругое сопряжение каретки 10 и переходного элемента 9 осуществляется посредством плоской пружины 15, приводит к более равномерному прижатию каретки 10 к базовому элементу 2. Это повышает точностные характеристики перемещения каретки 10 и расширяет функциональные возможности устройства.
То, что упругое сопряжение каретки 10 и переходного элемента 9 выполнено в виде плоской перфорированной пружины 16, приводит к еще более равномерному прижатию каретки 10 к базовому элементу 2. Это повышает точностные характеристики перемещения каретки 10 и расширяет функциональные возможности устройства.
То, что переходной элемент 9 выполнен в виде рельсовой направляющей, повышает надежность устройства. Это также повышает точностные характеристики перемещения каретки 10 и расширяет функциональные возможности устройства.
То, что переходной элемент 9 выполнен в виде плоской пружины, упрощает конструкцию устройства.
То, что каретка 10 установлена на базовом элементе 2 посредством первого промежуточного элемента 17 и второго промежуточного элемента 18, подключенных к модулю контроля давления 19 и обеспечивающих вакуумный прижим, расширяет функциональные возможности устройства.
То, что каретка 10 установлена на базовом элементе 2 посредством первого промежуточного элемента 17 и второго промежуточного элемента 18, подключенных к модулю контроля давления 19 и обеспечивающих аэростатический эффект, приводит к более плавному перемещению каретки 10. Это расширяет функциональные возможности устройства.
То, что каретка 10 установлена на базовом элементе 2 посредством трех приводов 22 по координате Z, расширяет функциональные возможности устройства.
То, что первый привод 4 включает первый переходной элемент 50, сопряженный со вторым переходным элементом 51 и третьим переходным элементом 52, включает также первый двигатель 53 и второй двигатель 54, при этом первый переходной элемент 50 соединен с первым подвижным элементом 4, второй переходной элемент 51 соединен с первым двигателем 53 с возможностью отсоединения от него, третий переходной элемент 52 соединен со вторым двигателем 54 с возможностью отсоединения от него, приводит к повышению точностных характеристик устройства. Это также расширяет функциональные возможности устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УГЛОВОГО СКАНИРОВАНИЯ | 2015 |
|
RU2628673C2 |
| УСТРОЙСТВО ПОДВИЖКИ ОБРАЗЦА | 2005 |
|
RU2377620C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП ДЛЯ ИССЛЕДОВАНИЯ КРУПНОГАБАРИТНЫХ ОБЪЕКТОВ | 2010 |
|
RU2515731C2 |
| ИНЕРЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2465712C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2005 |
|
RU2282257C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1999 |
|
RU2159454C1 |
| Сканирующий зондовый микроскоп, совмещенный с устройством модификации поверхности образца | 2017 |
|
RU2653190C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С УСТРОЙСТВОМ ДЛЯ ФУНКЦИОНИРОВАНИЯ МНОГОЗОНДОВОГО ДАТЧИКА | 2013 |
|
RU2538412C1 |
| УСТРОЙСТВО МАНИПУЛИРОВАНИЯ | 2014 |
|
RU2591871C2 |
| КООРДИНАТНЫЙ СТОЛ | 2015 |
|
RU2618073C1 |
Устройство подвижки относится к точной механике и может быть использовано для перемещения образцов по двум или трем координатам, например, в зондовой микроскопии. Сущность изобретения заключается в том, что в устройстве подвижки каретка 10 упруго сопряжена с переходным элементом 9 по координате Z, перпендикулярной плоскости координат X, Y. Технический результат изобретения заключается в повышении точностных характеристик устройства и расширении его функциональных возможностей. 9 з.п. ф-лы, 9 ил.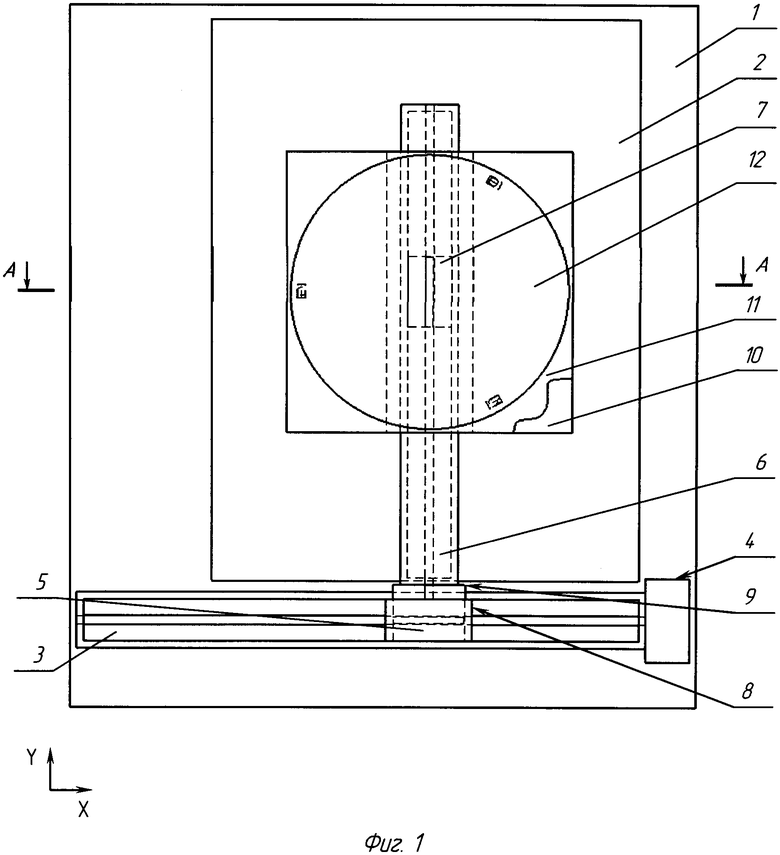
1. Устройство подвижки, включающее в себя основание (1), на котором установлен базовый элемент (2), также установлен первый передаточный элемент (3) с первым приводом по координате X (4) и первым подвижным элементом (5), сопряженный со вторым передаточным элементом (6), на котором расположен второй подвижный элемент (7) и второй привод по координате Y (8), посредством переходного элемента (9), включающее также каретку (10), расположенную на базовом элементе (2) с возможностью перемещения по координатам X, Y, и держатель образца (11), сопряженный с кареткой (10), отличающееся тем, что каретка (10) упруго сопряжена с переходным элементом (9) по координате Z, перпендикулярной плоскости координат X, Y.
2. Устройство по п. 1, отличающееся тем, что упругое сопряжение каретки (10) и переходного элемента (9) осуществлено посредством второго передаточного элемента (6).
3. Устройство по п. 1, отличающееся тем, что упругое сопряжение каретки (10) и переходного элемента (9) осуществляется посредством плоской пружины (15).
4. Устройство по п. 1, отличающееся тем, что упругое сопряжение каретки (10) и переходного элемента (9) выполнено в виде плоской перфорированной пружины (16).
5. Устройство по п. 1, отличающееся тем, что переходной элемент (9) выполнен в виде рельсовой направляющей.
6. Устройство по п. 1, отличающееся тем, что переходной элемент (9) выполнен в виде плоской пружины.
7. Устройство по п. 1, отличающееся тем, что каретка (10) установлена на базовом элементе (2) посредством первого промежуточного элемента (17) и второго промежуточного элемента (18), подключенных к модулю контроля давления (19) и обеспечивающих вакуумный прижим.
8. Устройство по п. 1, отличающееся тем, что каретка (10) установлена на базовом элементе (2) посредством первого промежуточного элемента (17) и второго промежуточного элемента (18), подключенных к модулю контроля давления (19) и обеспечивающих аэростатический эффект.
9. Устройство по п. 1, отличающееся тем, что каретка (10) установлена на базовом элементе (2) посредством трех приводов (22) по координате Z.
10. Устройство по п. 1, отличающееся тем, что первый привод (4) включает первый переходной элемент (50), сопряженный со вторым переходным элементом (51) и третьим переходным элементом (52), включает также первый двигатель (53) и второй двигатель (54), при этом первый переходной элемент (50) соединен с первым подвижным элементом (5), второй переходной элемент (51) соединен с первым двигателем (53) с возможностью отсоединения от него, третий переходной элемент (52) соединен со вторым двигателем (54) с возможностью отсоединения от него.
| ДВУХКООРДИНАТНЫЙ МИКРОПОЗИЦИОНЕР | 2006 |
|
RU2306621C1 |
| US 7333191 B2, 19.02.2008 | |||
| МАЛОГАБАРИТНЫЙ АКУСТИЧЕСКИЙ МИКРОСКОП | 1995 |
|
RU2112969C1 |
| EP 984270 A2, 08.03.2000 | |||
| Устройство для выполнения метрологических операций на объекте | 1987 |
|
SU1623573A3 |

