Изобретение относится к области машиностроения, в частности турбостроения и может быть использовано для доводки авиационных двигателей при стендовых испытаниях, а также при диагностике технического состояния турбомашин.
Эффективность работы осевых лопаточных турбомашин существенным образом зависит от величины радиального зазора. Влияние на эффективность работы величин радиально-осевых зазоров между рабочими лопатками и корпусом турбомашин возрастает с увеличением окружных скоростей, рабочих давлений и температур. Оптимизация величины зазора и, связанная с этой задачей процедура определения момента и характера касания лопатки вращающегося колеса о корпус турбомашины, является существенной технической проблемой.
Диагностирование момента касания лопатки о корпус может быть основано на анализе вибраций, генерируемых работающей турбомашиной. Существует несколько способов анализа вибрационных сигналов. Обычный метод, работающий во временной области и основывающийся на измерении общего уровня вибраций, является самым простым. Метод заключается в отслеживании допустимых уровней вибраций. Для него были разработаны алгоритмы с целью извлечения характерных признаков в записанных сигналах. Среди них метод быстрого преобразования Фурье (БПФ), с использованием которого сигнал представляется в частотной области. По пикам полученного частотного спектра инженер может идентифицировать аномальное поведение машины. Поскольку метод БПФ не может работать с переходными процессами, которые имеют место в нестационарных сигналах и которые, как правило, могут сопутствовать наличию повреждений в работающей машине, были разработаны более сложные методы анализа сигналов, такие как вейвлет преобразование. Эти методы могут обнаружить механические явления, которые являются переходными в силу своей природы, например, такие как касание ротора о корпус машины. Они преобразуют сигнал из области «амплитуда-время» в область «частота-время», где могут быть локализованы частотные компоненты и структурированные сигналы.
Вейвлеты являются наглядным инструментом многократного разложения сигнала и оказались полезными при идентификации дефектов в элементах вращающихся машин и потенциальных разрушений этих элементов в машиностроении.
Известен способ обнаружения момента касания диска, поджимаемого с торца механизмом, имитирующим такое касание (Eduardo Rubio and Juan с. Jauregui, CIATEQ A.C., Centro de Tecnologia Avanzada, Mexico, Time-Frequency Analysis for Rotor-Rubbing Diagnosis, Advances in Vibration Analysis Research, pp. 295-314, www.intechopen.com), согласно которому сигнал, записанный с вибродатчика, установленного на корпусе подшипника преобразуется во времячастотную область.
По осциллограммам в области «амплитуда-время» можно определить два вида касания: мягкое и жесткое. Мягкое касание характеризуется небольшой амплитудой вибрационного сигнала и считается допустимым явлением. Амплитуда сигнала при жестком касании гораздо больше. Жесткое касание может привести к разрушению и поэтому крайне нежелательно. Преобразование вибросигнала в окрестности момента касания в частотно-временную область показывает наличие характерных признаков касания на получаемой картине в виде вертикальных полос.
Данный способ невозможно применить для лопаточных машин, т.к. он разработан для вращающегося диска с гладкой торцевой поверхностью. Характер взаимодействия торцевой части диска с корпусом существенно отличается от такового в случае осевой турбомашины.
Известен также способ определения наличия касания лопаток ротора паровой турбины о корпус, при котором используется информация, поступающая от датчика вибраций (Gang Zhao, Dongxiang Jiang, Jinghui Diao, Lijun Qian («Application of wavelet time-frequency analysis on fault diagnosis for steam turbine» SURVEILLANCE 5 CETIM Senlis 11-13 October 2004, pp. 1-10).
Недостаток данного способа заключается в том, что, как и в предыдущем техническом решении, не используется информация о колебаниях лопатки, которая входит в соприкосновение с корпусом машины. Сигнал, поступающий от датчика вибраций имеет много посторонних шумов, в связи с чем возникают технические сложности в идентификации характера касания лопатки о корпус.
Наиболее близким аналогом является техническое решение для анализа ротор-статорного взаимодействия в рабочем компрессоре (A. Batailly, М. Legrand, A. Millecamps, F. Garcin. Numerical study of a rotor/stator interaction case experimentally simulated with an industrial compressor. Turbo Expo 2012, Jun 2012, Copenhagen, Denmark, pp.GT2012-68171, 2012. <hal-00714538>), содержащее специально подготовленную лопатку с тензодатчиком, напротив торца которой на поверхности корпуса нанесен истираемый слой.
К недостатку данного способа следует отнести тот факт, что для проведения экспериментальных исследований изготовлена и препарирована специальная лопатка, длина которой была больше остальных.
Техническая проблема заключается в создании способа, обеспечивающего повышение достоверности выявления наличия и характера касания лопатки о корпус турбомашины.
Технический результат заключается в сокращении затрат времени на проведение испытаний посредством непрерывного мониторинга моментов касания лопаток о корпус турбомашины.
Решение технической проблемы с достижением заявленного технического результата обеспечивается реализацией способа определения характера касания лопатки вращающегося колеса о корпус турбомашины, характеризующегося тем, что снабжают лопатку колеса по меньшей мере одним тензометрическим датчиком, обеспечивают регистрацию сигнала тензометрического датчика, следят за уровнем сигнала и с использованием быстрого преобразования Фурье осуществляют обработку сигнала в окрестности точки с максимальным уровнем сигнала для получения значений частот и амплитуд колебаний вращающегося колеса, при этом частоту колебаний колеса с наибольшей амплитудой выбирают в качестве наблюдаемой, далее, представляя сигнал тензометрического датчика на наблюдаемой частоте в координатах «амплитуда-время», следят за периодичностью сигнала и в случае нарушения его периодичности фиксируют временной диапазон, соответствующий выявленному нарушению с определением временной координаты нарушения периодичности сигнала, и затем в упомянутом временном диапазоне осуществляют вейвлет-преобразование сигнала, осуществляя переход от его представления в координатах «амплитуда-время» в представление сигнала тензометрического датчика в координатах «частота-время», анализируют полученную картину сигнала и по виду полученной картины в окрестности временной координаты нарушения периодичности сигнала судят о характере касания лопатки о корпус турбомашины.
Такой способ представления сигнала является удобным, поскольку вейвлет анализ позволяет наглядно выявить тонкие особенности структуры сигнала.
Изобретение поясняется чертежами, где
на фиг. 1 показана осциллограмма сигнала, получаемого с тензометрического датчика;
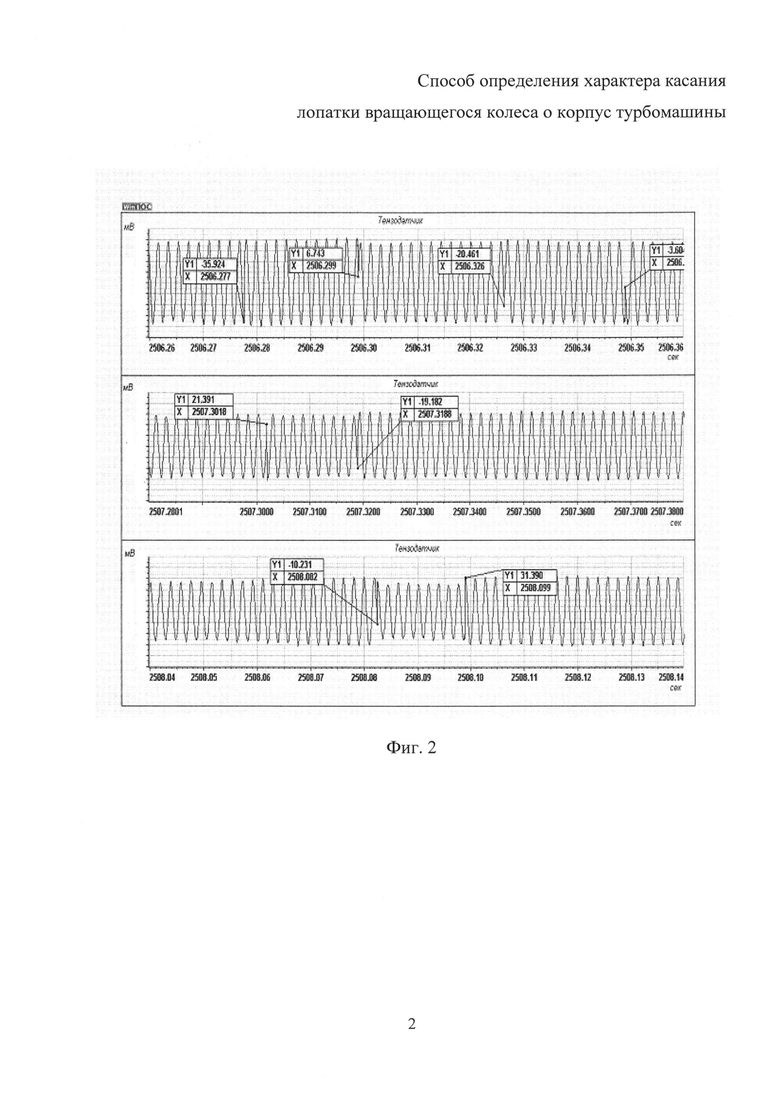
на фиг. 2 приведена осциллограмма сигнала в координатах «амплитуда-время» для режима работы, характеризующегося высокой вероятностью жесткого касания, после обработки сигнала тензодатчика с использованием метода БПФ;
на фиг. 3 приведена картина преобразованного сигнала в координатах «частота-время», приведенного на фиг. 1, полученного с использованием вейвлет-преобразования;
на фиг. 4 приведена картина вторично преобразованного сигнала в координатах «частота-время», приведенного на фиг. 2, полученного с использованием вейвлет-преобразования;
на фиг. 5 приведена осциллограмма сигнала в координатах «амплитуда-время» для режима работы, характеризующегося высокой вероятностью мягкого касания, после обработки сигнала тензодатчика с использованием метода БПФ;
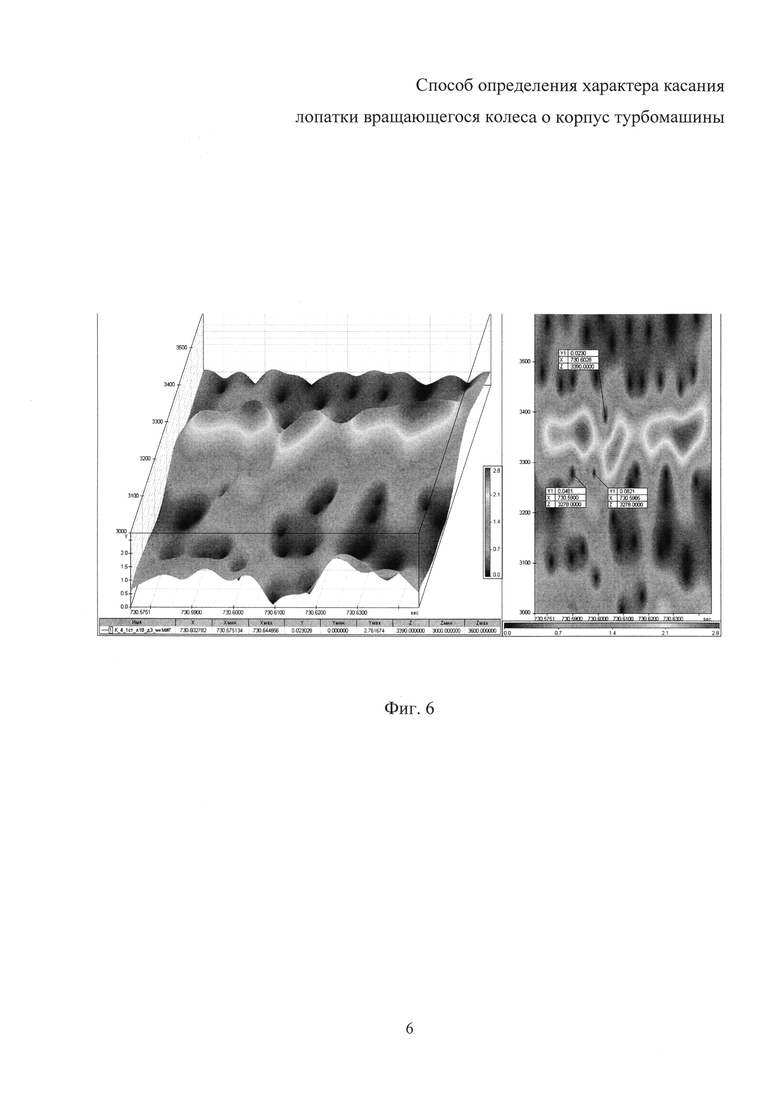
на фиг. 6 приведена картина вторично преобразованного сигнала в координатах «частота-время», приведенного на фиг. 5, полученного с использованием вейвлет-преобразования.
Способ реализуется следующим образом.
При проведении стендовых испытаний, в частности в процессе доводки авиационного двигателя, осуществляют регистрацию сигналов, получаемых с тензометрических датчиков (тензодатчиков), установленных на лопатках рабочего колеса. В зависимости от цели проведения стендовых испытаний количество датчиков может быть различным. В пределе это может быть один датчик.
Далее, при раскрытии изобретения, пояснения будут касаться одного датчика, что не исключает использование нескольких тензодатчиков, обработка сигналов которых осуществляется аналогичным образом.
Для определения характера касания лопатки вращающегося колеса о корпус турбомашины осуществляют определенную последовательность действий. Первоначально препарируют лопатку, устанавливая на нее тензодатчик. В процессе стендовых испытаний регистрируют сигнал тензодатчика и следят за его уровнем (амплитудой сигнала). Пример записанного сигнала тензодатчика показан на фиг. 1.
При обнаружении временной зоны с повышенным уровнем сигнала осуществляют его первичную обработку. Обработку сигнала осуществляют в окрестности точки с максимальным уровнем с использованием метода быстрого преобразования Фурье (БПФ). В результате обработки сигнала получают значения частот и амплитуд колебаний вращающегося колеса. Примеры графиков с обработанным сигналом в координатах «амплитуда-время» показаны на фиг. 2. При этом частоту колебаний вращающегося колеса с наибольшей амплитудой выбирают в качестве наблюдаемой частоты. Под наблюдаемой частотой понимают частоту вращения колеса, на которой реализуются максимальные напряжения в лопатке (максимальный уровень сигнала тензодатчика).
Далее, представляя сигнал тензометрического датчика на наблюдаемой частоте в координатах «амплитуда-время», следят за периодичностью сигнала, т.е. определяют повторяемость формы сигнала с течением времени. В случае нарушения повторяемости сигнала (его периодичности) фиксируют временной диапазон, соответствующий выявленному нарушению с определением временной координаты нарушения периодичности сигнала.
На фиг. 2 моменты нарушения периодичности сигнала обозначены флажками с указанием координат. В упомянутом временном диапазоне, который включает (охватывает) момент нарушения периодичности сигнала осуществляют дополнительную обработку сигнала, которая в данном случае производится с использованием вейвлет-преобразования. Таким образом, осуществление вейвлет-преобразования сигнала обеспечивает переход представления обрабатываемого сигнала из системы координат «амплитуда-время» в систему координат «частота-время».
Картина дополнительно обработанного сигнала с использованием вейвлет-преобразования в координатах «частота-время» показана на фиг. 4, 6.
После получения картины сигнала в координатах «частота-время», полученную картину (т.н. скалограмму) анализируют и выявляют характерные графические объекты, свойственные факту касания лопатки о корпус турбомашины. Упомянутые графические объекты представляют собой вытянутые вдоль вертикальной оси (ось «частота») темные пятна, вкрапленные в область высоких напряжений. На трехмерной, пространственной диаграмме эти графические объекты идентифицируются как углубления. При наличии таких графических объектов делают вывод о наличии касания.
Характер касания определяют по форме упомянутых графических объектов (темных пятен). Сильно вытянутое пятно, по форме похожее на овсяное зерно, свидетельствует о факте жесткого касания (см. фиг. 4). Менее вытянутое пятно, по форме похожее на рисовое зерно, свидетельствует о факте мягкого касания (см. фиг. 6).
Необходимость использования двойного преобразования сигнала (метод БПФ и вейвлет) может быть проиллюстрирована с помощью фиг. 3. На фиг. 3 приведена картина сигнала тензодатчика, приведенного на фиг. 1, полученная с использованием только вейвлет-преобразования сигнала без предварительной обработки с использования метода БПФ. Понятно, что по характеру представленного графического объекта невозможно судить о наличии касания. Тем более невозможно определить его характер. Фактически, вейвлет-преобразование необработанного сигнала переводит картину сигнала из одной системы координат в другую без выявления информации, необходимой для исследователя и для решения заявленной технической проблемы.
Для режима работы, характеризующегося высокой вероятностью мягкого касания, осциллограмма сигнала имеет меньшие амплитуды. Обычно, после обработки сигнала тензодатчика с использованием метода БПФ, форма сигнала в координатах «амплитуда-время» имеет вид, приведенный на фиг. 5. Выявление момента касания в данном случае еще более затруднено. Использование вейвлет-преобразования данного сигнала позволяет выявить моменты касания (см. фиг. 6). На фиг. 5 эти моменты обозначены флажками. Из сопоставления информации, приведенной на фиг. 5 и 6 следует вывод, что использование только метода БПФ не позволяет выявить факты касания лопатки о корпус турбомашины.
Таким образом, сигналы, записанные с тензодатчика, наклеенного на лопатку, могут быть использованы для диагностики касания лопатки о корпус турбомашины. В то же время, как видно на осциллограмме, приведенной на фиг. 2, на ней идентифицированы точки разрыва сигнала. Вместе с тем, такое представление сигнала в амплитудно-временной области является неудобным для выявления характера касания из-за отсутствия характерных и легко различимых признаков в представленной осциллограмме.
Преобразование сигнала в координатах «частота-время» позволяет наглядно и четко указать на характерные признаки касания лопатки о корпус турбомашины. На фиг. 4 показана время-частотная картина касания лопатки рабочего колеса о корпус. Основным признаком жесткого касания является вертикальная светлая полоса, внутри которой располагается темная область, характеризующая момент касания лопатки о корпус. Представление результатов обработки сигнала в таком виде в темпе испытаний турбомашины на стенде позволит вовремя определить потенциальную опасность поломки лопатки рабочего колеса и принять необходимые меры, вплоть до остановки турбомашины.
Случаев мягкого касания на практике встречается множество, поскольку приработка лопаток к истираемому покрытию является стандартной технологической операцией и для каждого конкретного касания будет иметь место свой график тензосигнала. В отличие от мягкого касания график тензосигнала, соответствующий жесткому касанию, строго структурирован, т.е. более упорядочен, и непрерывное вейвлет-преобразование тензосигнала однозначно укажет на характер касания.
Характер осциллограммы, приведенной на фиг. 5, существенно отличается от осциллограммы, приведенной на фиг. 2. Осциллограмма на фиг. 2 носит ярко выраженный синусоидальный характер с хорошо различимыми признаками вероятного касания. Осциллограмма на фиг. 5 представляет из себя набор синусоид, в котором отсутствуют признаки искажения сигнала, характерные для жесткого касания.
На время-частотной картине можно выделить однозначно трактуемые признаки, характеризующие момент и характер касания лопатки о корпус турбомашины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ диагностики касания лопаток рабочего колеса о корпус в составе осевой турбомашины | 2022 |
|
RU2795805C1 |
| Устройство для анализа динамических процессов в рабочих колесах турбомашин | 2017 |
|
RU2659428C1 |
| Способ определения динамических напряжений в лопатках рабочего колеса турбомашины | 2016 |
|
RU2634511C1 |
| Способ определения форм колебаний вращающихся колес турбомашин | 2018 |
|
RU2673950C1 |
| Способ диагностики форм резонансных колебаний лопаток рабочего колеса турбомашины | 2016 |
|
RU2614458C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КОЛЕБАНИЙ ЛОПАТОК ВРАЩАЮЩЕГОСЯ КОЛЕСА ТУРБОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2584723C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИКИ КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ ЭЛЕМЕНТА ТУРБОМАШИНЫ | 2013 |
|
RU2538427C1 |
| СПОСОБ ДИАГНОСТИКИ РЕЗОНАНСНЫХ КОЛЕБАНИЙ ЛОПАТОК РАБОЧЕГО КОЛЕСА В СОСТАВЕ ОСЕВОЙ ТУРБОМАШИНЫ | 2011 |
|
RU2451279C1 |
| СПОСОБ ИЗМЕРЕНИЯ МНОГОМЕРНЫХ ПЕРЕМЕЩЕНИЙ И ОБНАРУЖЕНИЯ КОЛЕБАНИЙ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2002 |
|
RU2272990C2 |
| СПОСОБ ДИАГНОСТИКИ КОЛЕБАНИЙ РАБОЧЕГО КОЛЕСА ТУРБОМАШИНЫ | 2005 |
|
RU2287141C2 |




Изобретение относится к области машиностроения, в частности турбостроения, и может быть использовано для доводки авиационных двигателей при стендовых испытаниях. Снабжают лопатку колеса по меньшей мере одним тензометрическим датчиком, обеспечивают регистрацию сигнала тензометрического датчика, следят за уровнем сигнала и с использованием быстрого преобразования Фурье осуществляют обработку сигнала в окрестности точки с максимальным уровнем сигнала для получения значений частот и амплитуд колебаний вращающегося колеса, при этом частоту колебаний колеса с наибольшей амплитудой выбирают в качестве наблюдаемой, далее, представляя сигнал тензометрического датчика на наблюдаемой частоте в координатах «амплитуда-время», следят за периодичностью сигнала и в случае нарушения его периодичности фиксируют временной диапазон, соответствующий выявленному нарушению с определением временной координаты нарушения периодичности сигнала, и затем в упомянутом временном диапазоне осуществляют вейвлет-преобразование сигнала, осуществляя переход от его представления в координатах «амплитуда-время» в представление сигнала тензометрического датчика в координатах «частота-время», анализируют полученную картину сигнала и по виду полученной картины в окрестности временной координаты нарушения периодичности сигнала судят о характере касания лопатки о корпус турбомашины. Изобретение обеспечивает повышение достоверности выявления наличия и характера касания лопатки о корпус турбомашины при сокращении затрат времени на проведение испытаний посредством непрерывного мониторинга моментов касания лопаток о корпус турбомашины. 6 ил.
Способ определения характера касания лопатки вращающегося колеса о корпус турбомашины, характеризующийся тем, что снабжают лопатку колеса по меньшей мере одним тензометрическим датчиком, обеспечивают регистрацию сигнала тензометрического датчика, следят за уровнем сигнала и с использованием быстрого преобразования Фурье осуществляют обработку сигнала в окрестности точки с максимальным уровнем сигнала для получения значений частот и амплитуд колебаний вращающегося колеса, при этом частоту колебаний колеса с наибольшей амплитудой выбирают в качестве наблюдаемой, далее, представляя сигнал тензометрического датчика на наблюдаемой частоте в координатах «амплитуда-время», следят за периодичностью сигнала и в случае нарушения его периодичности фиксируют временной диапазон, соответствующий выявленному нарушению с определением временной координаты нарушения периодичности сигнала, и затем в упомянутом временном диапазоне осуществляют вейвлет-преобразование сигнала, осуществляя переход от его представления в координатах «амплитуда-время» в представление сигнала тензометрического датчика в координатах «частота-время», анализируют полученную картину сигнала и по виду полученной картины в окрестности временной координаты нарушения периодичности сигнала судят о характере касания лопатки о корпус турбомашины.
| ALAIN BATAILLY, MATHIAS LEGRAND, MILLECAMPS ANTOINE, FRANCOIS GARCIN | |||
| Numerical study of a rotor/stator interaction case experimentally simulated with an industrial compressor | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ РАДИАЛЬНОГО ЗАЗОРА МЕЖДУ ТОРЦАМИ ЛОПАТОК ВРАЩАЮЩЕГОСЯ РОТОРА И КОРПУСОМ ТУРБИНЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2415379C1 |
| СПОСОБ ИЗМЕРЕНИЯ И КОНТРОЛЯ РАДИАЛЬНО-ОСЕВЫХ ЗАЗОРОВ В ТУРБОМАШИНАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2280238C1 |
| СПОСОБ ДИАГНОСТИКИ ФЛАТТЕРА ЛОПАТОК РАБОЧЕГО КОЛЕСА В СОСТАВЕ ОСЕВОЙ ТУРБОМАШИНЫ | 2013 |
|
RU2525061C1 |
| УСТРОЙСТВО И СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ВИБРАЦИИ ЛОПАТОК | 2007 |
|
RU2465562C2 |
| US 7341428 B2, 11.03.2008 | |||
| US 5497101 A1, 05.03.1996. | |||

